空間站機械臂關節快速連接裝置設計與驗證
2023-01-05 05:28:22李德倫趙志軍楊光輝姚思雨
載人航天 2022年6期
張 運,李德倫*,王 康,朱 超,趙志軍,楊光輝,姚思雨
(1.空間智能機器人系統技術與應用北京市重點實驗室,北京空間飛行器總體設計部,北京 100094;2.北京衛星制造廠有限公司,北京 100094)
1 引言
機械臂是大型空間站進行在軌維護和建設的必要工具。機械臂在地面遙操作和空間站內航天員的聯合操作下,實現空間站艙表巡檢、大型貨物轉運、輔助交會對接、航天技術試驗照料等重大任務[1-2]。
空間機械臂作為大型艙外機械臂,在軌壽命要求10年以上,且機械臂造價以及發射費用昂貴,因此需要其具有通過維修維護延長使用壽命的能力[3]。在關節、末端等單機失效的情況下,需要通過在軌維修進行故障單機更換[4]。快速連接裝置作為機械臂關節與關節、末端、臂桿及中央控制器等單機之間的連接結構,是保證機械臂在軌維修的基礎。
目前,國際空間站機械臂有加拿大航天飛機遙操作臂SRMS(Shuttle Remote Manipulator System)、空間站遙操作臂SSRMS(Space Station Remote Manipulator System)、日本實驗艙機械臂JERMRS(Japanese Experiment Module Remote Manipulator System)、歐洲機械臂ERA(European Robotic Arm)等。其中航天飛機遙操作臂SRMS 臂長15 m,有6 個關節[5],在軌實現了衛星捕獲、衛星維修、國際空間站建設等[6]。由于航天飛機可以返回地球,因此SRMS 機械臂關節采用不可在軌更換設計[7]。
空間站遙操作臂SSRMS 采用2 個完全對稱的臂桿設計,共包含7 個關節和2 個末端執行器。SSRMS 采用可在軌維修設計[8],即采用模塊化關節與快換接口設計。快換接口由6 個凸臺與配對U 型槽組成,通過6 個快換螺釘連接[9]。2002年6月,SSRMS 的腕部旋轉關節進行了在軌維修更換[10]。
日本的JEMRMS 機械臂由主臂MA 和小臂SFA 組成,其中MA 關節也采用了在軌可更換結構[11]。歐洲空間機械臂ERA 也采用對稱設計,共有7 個自由度,ERA 關節并未采用可在軌更換接口設計[12]。
綜上,目前公開關節快換接口結構,且在軌成功進行更換維修的只有SSRMS,但是其電氣接口設計、機械接口容差指標、快換裝置的操作力矩及測試等資料并公開發表。
中國空間站核心艙機械臂由7 個關節和2 個末端執行器等組成,重量約800 kg,規模大且承載能力強[13-14],在軌壽命指標為10年,通過維修后壽命指標為15年。為滿足中國空間站核心艙機械臂在軌壽命要求,機械臂具有在軌維修功能,可實現航天員在軌快速將故障單機從整臂中分離更換。核心艙機械臂各單機的連接均采用快速連接裝置連接[15-16],通過快速連接的在軌對接與分離,實現故障單機在軌快速更換。本文對核心艙機械臂使用的快速連接裝置的設計及驗證情況進行介紹。
2 設計需求
1)輕質量。受發射成本及發射空間限制,空間站核心艙機械臂重量要求不超過800 kg,而快速連接作為機械臂上各單機間的連接部件,在關節、末端執行器、臂桿及中央控制器等單機的對接處,共配備13 組[13],如圖1 所示,快速連接的重量對整臂的重量影響較大,需小于5 kg。
2)高剛度。核心艙機械臂在軌需執行最大25 t 負載搬運任務及艙段轉位對接等大載荷操作轉移任務。機械臂質量約800 kg,展開后長度超過10 m,其振動基頻要滿足設計要求,因此,快速連接裝置剛度應大于0.8×106Nm/rad。
3)低力矩。機械臂如需在軌維修,需要航天員在空間站艙外著航天服操作。受航天服阻尼力矩和航天服手套的影響,航天員的手部精細操作能力大大降低,因此,要求快速連接裝置拆裝操作簡便,且操作力矩不應超過35 Nm。
4)在軌維修。機械臂在軌維修作業通過航天員出艙使用專用在軌維修工具完成,因此,快速連接裝置上需要提供在軌維修工具接口,同時在外形上設計明顯的狀態標識,用于航天員在軌識別關節角度位置。
5)大容差。在軌維修操作時,受航天服影響,航天員視野受限,且在零重力環境下航天員的精細操作能力降低,因此需要快速連接對接接口(電接口及機械接口)具有大容差,提高在軌對接效率。
6)電氣浮動連接功能。快速連接裝置在建立機械連接的同時,需要將關節與相鄰連接部件完成電器連接,完成電源和通信等信息的傳遞。快速連接裝置上的電連接器,為滿足在軌對接容差需求,需要有浮動容差。
3 機構設計
3.1 工作原理
快速連接裝置主要由快速連接公組件和快速連接母組件組成,膨脹螺栓安裝在快速連接母組件上,浮動電連接器插頭端安裝在快速連接公組件上,插座端安裝在快速連接母組件上。快速連接公組件和母組件上均安裝有在軌維修接口,如圖2 所示。快速連接公組件和快速連接母組件分別安裝在需要快速組裝的不同單機產品上,通過膨脹螺栓膨脹實現鎖緊。

圖2 快速連接裝置組成圖Fig.2 Composition diagram of the quick connect device
快速連接的工作狀態分為初始狀態、導向對接狀態、電連接器連接狀態和膨脹螺栓鎖緊狀態。初始狀態下,膨脹螺栓拔出,反向膨脹鎖緊在快速連接母組件上;導向對接狀態下,快速連接公組件和快速連接母組件通過對接接口導向連接;隨后浮動電連接器通過導向銷完成浮動對接;插接到限位后,快速連接公組件和快速連接母組件的膨脹螺栓孔位對齊,利用膨脹螺栓專用工具,對膨脹螺栓施加力矩,膨脹螺栓膨脹,快速連接鎖緊。
3.2 本體結構設計
快速連接公組件和快速連接母組件上設計有楔形插口和垂直軸向的U 型槽,對接時將快速連接公組件插入快速連接母組件的楔形槽中。快速連接裝置通過楔形槽和U 型槽的對接實現圓周方向的定位和大容差設計,如圖3 所示。根據U型槽尺寸,快速連接的位置容差為3.8 mm,角度容差為2°。快速連接本體結構的容差設計如圖 4所示。

圖3 快速連接裝置對接口Fig.3 Interface of the quick connect device

圖4 快速連接裝置容差Fig.4 Tolerance of the quick connect device
3.3 維修接口設計
在快速連接公組件和快速連接母組件的圓周方向上分別設計有12 組在軌維修工具的接口,位置如圖 5 所示。機械臂在軌維修工具(包含固定裝置、拆裝裝置)通過12 組維修接口與機械臂的連接,實現力閉環。為在軌維修時能為航天員提供關節轉動角度參考,在快速連接上設計了角度刻線及角度標識,如圖6 所示。

圖5 維修接口Fig.5 Maintenance interfaces

圖6 角度標識Fig.6 Angle indicator
3.4 電連接器浮動設計
快速連接除機械連接外,還需提供整臂的電信號及通信信號連接。電連接需要有一定的容差,以滿足在軌維修需求;快速連接裝置選用了J95H 浮動電連接器,以實現容差需求;電連接器的浮動采用浮動螺釘形式,以保證連接強度。如圖 7 所示,通過合理設計螺釘的直徑a和安裝孔b大小,保證連接器的浮動量b-a滿足大于1.5 mm 的要求。

圖7 浮動電連接器安裝方式Fig.7 Installation of the floating electrical connector
為保證電連接器準確對接,電連接器設計了導向銷,如圖8 所示。導向銷的長度30.5 mm,大于連接器外殼的高度21.2 mm,在連接器外殼嚙合前,導向銷利用錐面實現插頭和浮動插座的導正,然后電連接器實現準確對接。

圖8 導向銷設計Fig.8 Design of the guide pins
3.5 膨脹螺栓設計
膨脹螺栓是快速連接實現低操作力矩、高剛度的關鍵部件,對膨脹螺栓的設計重點進行分析,確保快速連接裝置設計的可靠性。
3.5.1 膨脹螺栓組成
快速連接公組件與快速連接母組件之間的連接主要通過膨脹螺栓來實現,膨脹螺栓由2 個膨脹環、2 個鎖緊環、螺柱隔套、鎖緊螺母、鎖緊螺柱和間距隔套等零件組成,基本構型如圖9 所示。

圖9 膨脹螺栓組成圖Fig.9 Composition diagram of the expansion bolt
3.5.2 膨脹螺栓工作原理
膨脹螺栓的基本工作原理是:在自由狀態下,膨脹環和鎖緊環在內應力的作用下收攏在鎖緊螺柱上,膨脹環外圓與快速連接公、母上的隔套有較大的間隙,保證膨脹螺栓能夠方便的插入隔套中。當膨脹螺栓插入對接好的快速連接裝置后,鎖緊螺柱的前端插入到固定隔套里面,能夠提供膨脹螺栓擰緊時的阻力。此時擰緊鎖緊螺母,鎖緊螺母推動螺柱隔套向前移動,從而推動膨脹環壓縮,在錐形斜面的作用下,膨脹環向外脹開,緊密貼合在隔套上,并施加一定預緊力;鎖緊環向內收攏,緊密貼合在鎖緊螺柱上,并施加一定預緊力。通過施加滿足要求的擰緊力矩,確保膨脹螺栓和隔套之間達到滿足要求的預緊力,使得快速連接裝置在傳遞扭矩、承受彎矩的過程中不產生松動。
在鎖緊環中間,設有間距隔套,通過控制鎖緊環的間距,均衡3 個膨脹環受力,防止近鎖緊螺母處的膨脹環過度膨脹損壞。
當擰開膨脹環螺栓時,膨脹環和鎖緊環在自身彈簧力的作用下,自動收攏,使得膨脹環與隔套之間恢復初始間隙,保證膨脹螺栓能夠方便的取出。膨脹螺栓拔出后,可施加一個較小的力矩鎖緊膨脹螺栓,防止膨脹螺栓滑動。
3.5.3 膨脹螺栓受力分析
根據受力情況,建立膨脹螺栓擰緊時的受力圖,如圖10、圖11 所示,在螺母擰緊的過程中,螺母提供下壓力Fn,膨脹環和縮緊環克服摩擦力f和f'下滑,在下滑的過程中膨脹環逐漸膨脹,直到膨脹到位貼合隔套時,膨脹環表面承受壓力Fp。當擰松膨脹螺栓時,受力情況正好相反,由膨脹環的自身回彈收縮力,克服摩擦力f'擠壓縮緊環恢復初始狀態。

圖10 膨脹螺栓擰緊時受力分析圖Fig.10 Force analysis diagram of the expansion bolt when tightened

圖11 鎖緊環受力分析圖Fig.11 Force analysis diagram of the contraction ring
膨脹螺栓的鎖緊螺母擰松后,膨脹環正常回彈需克服膨脹環與縮緊環間的摩擦力f和縮緊環與螺柱間的摩擦力f',滿足條件如式(1)所示:

其中:Fw為膨脹環對縮緊環錐面的正壓力;f為膨脹環與縮緊環間的摩擦力,f=Fw·μ;f'為縮緊環與螺柱間的摩擦力。
其中:f'=Fwcos(θ)μ,正常回彈需滿足條件如式(2)所示:

摩擦系數μ取0.15,θ≥17.06°,即可正常回彈。設計狀態θ為24.775°,膨脹螺栓可正常回彈。
3.5.4 膨脹螺栓強度分析
建立膨脹環和縮緊環受力模型如圖12 所示,底端半縮緊環固定,頂端承受下壓力,膨脹環膨脹到位后承受平均壓力,錐面設置為滑動無分離接觸方式。

圖12 膨脹環與縮緊環有限元模型Fig.12 Finite element model of the expansion ring and contraction ring
有限元分析結果如圖 13 所示,膨脹環在320 N 壓力作用下,向下的移動量與膨脹環和間距隔套間隙尺寸一致,膨脹環剛好貼合隔套。

圖13 膨脹環與鎖緊環受力有限元分析結果Fig.13 Finite element analysis results of the expansion ring and contraction ring
當膨脹螺栓擰緊,按20 Nm 施加擰緊力矩后,可計算膨脹環表面正壓力如公式(3)所示:

其中:Fp為擰緊后,膨脹環表面壓力;Fn為預緊力,其中20 Nm 對應的預緊力為10 000 N;Fo為膨脹環膨脹到位時需要的初始力320 N。
可計算的表面壓力為51 089 N,對應的表面壓強為84.87 MPa。
根據以上加載工況分析,膨脹環最大應力為840 MPa,縮緊環最大應力為703 MPa。膨脹環和鎖緊環選用材料為不銹鋼棒0Cr15Ni7Mo2Al,該材料的σ0.2=1210 MPa,σb=1320 MPa,最小安全系數為1.44(1210/840)。根據美國NASA-STD-5001 標準中推薦的安全系數值,按屈服強度設計,安全系數需大于1.0,因此膨脹環和鎖緊環設計強度滿足要求。
3.6 潤滑的設計
由于快速連接活動零件的表面在真空環境下存在冷焊風險,為保證可靠性,在快速連接公組件及母組件的對接接口面、維修接口表面、膨脹螺栓的膨脹環和鎖緊環表面,均采用了有機粘接MoS2薄膜的固體潤滑措施,利用有機樹脂作為粘接劑,將MoS2粘覆于金屬底材表面。這種潤滑膜層具有以下特點: ①與基底間的附著力好,可以承受發射階段的力學環境; ②承載能力高; ③與摩擦對偶間不發生冷焊; ④在真空環境下摩擦系數低(小于0.1),耐磨壽命長。因此該潤滑膜可有效滿足快速連接的空間環境下使用要求。
4 試驗驗證
4.1 剛度測試驗證
快速連接剛度測試的原理如圖 14 所示,對試驗對象進行受力分析可以得到加載端面的變形角度如式(4)所示:

圖14 快速連接裝置剛度測試原理Fig.14 The principle of stiffness test of the quick connect device

等效的繞軸剛度如式(5)所示:

式中:θ為變形角度,GIp為扭轉剛度,M 為加載力矩,llj為快速連接直徑,Elj為材料彈性模量,Iljp為截面的極慣性矩。
剛度測試時,將快速連接固定在剛度測試臺上,對膨脹螺栓施加20 Nm 預緊力,然后對快速連接進行2000 Nm 加載,測試快速連接的彎曲剛度和扭轉剛度,圖 15 為其中的彎曲剛度曲線,根據力矩-角位移曲線擬合斜率(即為剛度值),扭轉剛度為1.01×107Nm/rad,彎曲剛度為6.36×106Nm/rad。

圖15 彎曲剛度曲線Fig.15 Bending stiffness curve
4.2 力矩測試驗證
為驗證在軌操作膨脹螺栓的擰緊擰松力矩,在高低溫真空罐內,對快速連接膨脹螺栓的擰緊擰松力矩進行了驗證,測試設備如圖16~17 所示。在高低溫真空罐內,快速連接母組件安裝在試驗臺上,膨脹螺栓與螺栓插拔機構連接,經磁流體密封裝置與真空罐外力矩傳感器連接。由旋轉插拔機構對膨脹螺栓進行擰緊插入或擰松拔出,力矩大小可通過力矩傳感器判斷。

圖16 膨脹螺栓力矩測試原理Fig.16 The principle of tighten and loosen torque of the expansion bolt

圖17 膨脹螺栓插拔試驗現場圖Fig.17 Test of the expansion bolt insertion and extraction
在真空環境下,測試了膨脹螺栓高溫端(70 ℃)和低溫端(-50 ℃)在20、25、30 Nm 擰緊力矩下的擰松力矩,測試結果如圖18、表2 所示。

圖18 膨脹螺栓擰緊擰松力矩測試曲線Fig.18 Tighten and loosen torque test curves of the expansion bolt

表2 膨脹螺栓擰緊擰松力矩測試結果Table 2 Tighten and loosen torque test results of the expansion bolt
由測試結果可知:
1)膨脹螺栓擰松力矩受溫度變化影響;
2)膨脹螺栓插拔順暢,膨脹螺栓在空間環境下擰緊力矩、擰松力矩滿足航天員輸出指標要求,膨脹螺栓的膨脹環、鎖緊環收縮狀態各循環下對比一致;
3)試驗后,膨脹螺栓的技術狀態良好。
4.3 人機工效驗證
快速連接裝置是關節在軌維修的關鍵組件,其操作影響在軌維修任務的成敗,為驗證快速連接裝置在軌的拆裝性能,對關節進行了在軌維修人機工效學驗證[17]。
膨脹螺栓的在軌操作包括插入/拔出和旋緊/擰松2 個主要動作。在軌維修時,將膨脹螺栓專用工具安裝在航天員艙外操作力矩扳手上,專用工具可實現膨脹螺栓的四面限位。當擰緊時,膨脹螺栓上的限位凸臺靠在L 型槽徑向一側,如圖19所示,擰松時相反。插入時膨脹螺栓的限位凸臺靠在L 型槽的軸向一側,如圖20 所示,拔出時相反。

圖19 專用工具擰緊膨脹螺栓示意圖Fig.19 Schematic diagram of the special loosening tool for the expansion bolt
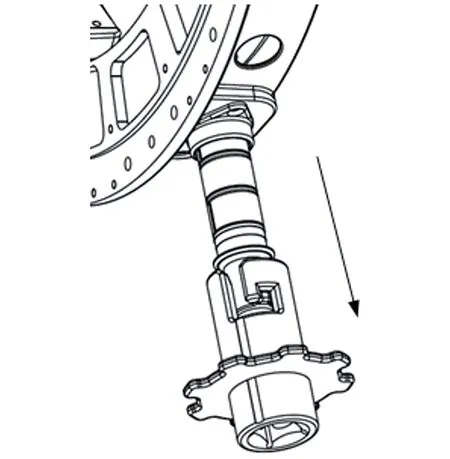
圖20 專用工具拔出膨脹螺栓示意圖Fig.20 Schematic diagram of the special tightening tools for the expansion bolt
維修工具安裝在快速連接裝置維修接口上,由隨動機構和分離機構兩部分組成。分離機構實現故障關節的拆裝,而隨動機構在關節拆除后,將機械臂其他組件進行臨時連接固定,如圖21所示。

圖21 關節維修裝置工具原理圖Fig.21 Schematic Diagram of the Repair Device Insertion and Extraction Mechanism for the Joint
在軌維修模擬試驗模擬場景如圖22 所示。2名航天員位于機械臂故障件兩側,依次完成膨脹螺栓擰松、快速連接分離、故障關節更換、快速連接組合、膨脹螺栓鎖緊等操作。

圖22 膨脹螺栓在軌維修地面試驗驗證Fig.22 Ground test of the on-orbit maintenance for the expansion bolt
5 結論
本文根據空間站核心艙機械臂的特點和在軌任務對快速連接裝置的需求,開展了快速連接裝置的剛度、容差、維修需求設計,經設計分析及試驗驗證,設計的快速連接裝置具有如下特點:
1)質量輕。通過機構的合理設計,快速連接質量為僅為3.5 kg,遠小于指標5 kg 要求。
2)連接剛度高。經過地面剛度測試及在軌使用驗證,可以滿足中國空間站機械臂25 t 大載荷操作的需求。
3)操作簡便,操作力矩小。通過一套專用工具實現擰松、擰緊、拔出、固定一系列動作,操作力矩可以與中國航天員的作業能力相匹配。
4)設計有維修接口,機械接口有一定的容差和導向,電接口有導向與浮動容差,有利于航天員在艙外進行在軌維修,提高了機械臂系統的可靠性與壽命。
5)該設計方式可為其他在軌裝配、在軌維修產品提供借鑒與參考。
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
現代裝飾(2020年7期)2020-07-27 01:27:42
當代工人(2020年8期)2020-05-25 09:07:38
流行色(2020年1期)2020-04-28 11:16:38
電腦報(2019年40期)2019-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09
