改進粒子群算法自抗擾控制在磁懸浮系統(tǒng)中的研究*
2023-01-07 13:10:26翟遠盛王樹賢
科技與創(chuàng)新 2023年1期
翟遠盛,王樹賢,李 亮
(江西理工大學(xué)電氣工程與自動化學(xué)院,江西 贛州 314000)
磁懸浮技術(shù)利用磁場使物體懸浮,主要應(yīng)用于開關(guān)磁阻電機、磁懸浮軌道交通、磁懸浮軸承中[1-3]。但如何設(shè)計控制器滿足系統(tǒng)實時性、抗干擾性是一項挑戰(zhàn),許多學(xué)者對此進行了研究。在魯棒控制設(shè)計中選擇合適的加權(quán)函數(shù),并結(jié)合離散數(shù)字控制,使磁懸浮系統(tǒng)具有快速響應(yīng)性[4]。在PID控制中引入神經(jīng)網(wǎng)絡(luò)反饋補償,提高了磁懸浮控制系統(tǒng)的動態(tài)性能和精度[5]。這些算法相對復(fù)雜,為此研究一種簡單實用的控制系統(tǒng)是磁懸浮技術(shù)廣泛應(yīng)用的關(guān)鍵。
PID(Packet Identifier)控制動態(tài)性能受參數(shù)影響較大,當(dāng)被控系統(tǒng)參數(shù)因環(huán)境改變時,需要調(diào)節(jié)PID增益。而自抗擾控制(ADRC)通過輸入動態(tài)反饋線性化,使系統(tǒng)等效為串聯(lián)積分控制,解決了PID控制的缺點[6-7]。自抗擾控制的實時估計擾動和快速補償機制,使控制系統(tǒng)具有強魯棒性、對環(huán)境具有很強的適應(yīng)性,所以自抗擾控制應(yīng)用于磁懸浮系統(tǒng)中具有超調(diào)小、相應(yīng)快的控制品質(zhì)。此外,自抗擾控制可用于速度跟蹤、電機控制、濾波技術(shù)、伺服系統(tǒng)等方面[8-10]。但自抗擾控制參數(shù)眾多,參數(shù)整定通常采取智能調(diào)節(jié)算法,如遺傳算法、神經(jīng)網(wǎng)絡(luò)、自適應(yīng)學(xué)習(xí)算法[11-12],這些算法具有一定計算量,需要良好的硬件支持。
實驗采用單自由度磁懸浮球作為研究對象,對磁懸浮球系統(tǒng)進行建模分析,采用改進粒子群算法對自抗擾控制器參數(shù)進行優(yōu)化,對系統(tǒng)抗干擾、跟蹤能力進行測試實驗并分析系統(tǒng)性能。
1 磁懸浮控制系統(tǒng)
1.1 磁懸浮系統(tǒng)原理
磁懸浮系統(tǒng)由電磁鐵、光學(xué)傳感器、驅(qū)動電路、控制器組成,結(jié)構(gòu)如圖1所示。電磁鐵繞組中通入電流i產(chǎn)生電磁力F,當(dāng)電磁力F與重力G相等時實現(xiàn)小球懸浮。由于電磁力與小球位置有關(guān),外界輕微的干擾都會導(dǎo)致磁力的變化,要實現(xiàn)系統(tǒng)平衡需要對小球位置采取閉環(huán)控制。
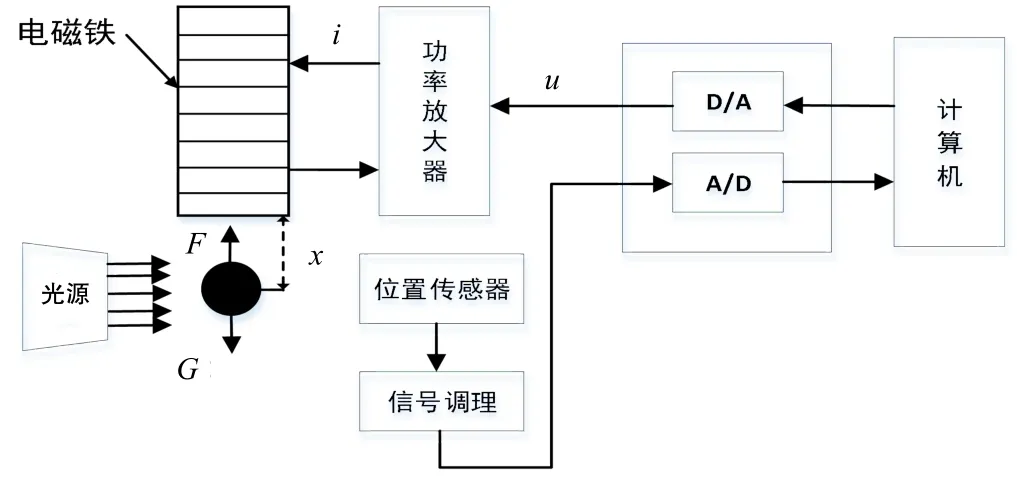
圖1 磁懸浮系統(tǒng)結(jié)構(gòu)模型
1.2 磁懸浮系統(tǒng)數(shù)學(xué)模型
實際控制中磁懸浮系統(tǒng)存在眾多干擾。如電壓-電流放大器的滯后時間、電源電壓的波動、導(dǎo)線溫度升高使電阻發(fā)生改變,這些因素是磁懸浮系統(tǒng)不確定的原因。由于控制器采用自抗擾控制技術(shù),具有不依賴精確的數(shù)學(xué)模型,所以對磁懸浮系統(tǒng)進行建模有以下處理方法:①忽略磁懸浮系統(tǒng)因外界環(huán)境導(dǎo)致系統(tǒng)參數(shù)改變;②驅(qū)動電路滯后時間為微秒級,忽略電流滯后效應(yīng),對磁懸浮系統(tǒng)建立二階系統(tǒng)模型。

由電磁定律和運動學(xué)方程得出以下系統(tǒng)方程:式(1)中:m為鐵球質(zhì)量;i為電磁鐵繞組瞬時電流;x為小球到電磁鐵表面的瞬時氣隙;u0為磁導(dǎo)率;A為鐵芯導(dǎo)磁截面積;N為電磁鐵線圈匝數(shù)。
由磁懸浮系統(tǒng)方程知電磁力與氣隙的平方成反比,是典型的非線性系統(tǒng),運用線性理論對系統(tǒng)分析時,需要對模型進行線性化處理。設(shè)小球在工作點附近懸浮,將平衡方程F(i,x)+mg=0與式(1)聯(lián)立,在平衡點泰勒展開,取輸出量x和輸入量U經(jīng)Laplace變換計算出傳遞函數(shù)。
磁懸浮系統(tǒng)的物理參數(shù)如表1所示。

表1 磁懸浮系統(tǒng)物理量數(shù)值
將表1中的參數(shù)代入傳遞函數(shù)公式中,即:

2 自抗擾控制器設(shè)計
自抗擾控制技術(shù)不依賴系統(tǒng)內(nèi)部結(jié)構(gòu),只需知道系統(tǒng)的階數(shù)及系統(tǒng)的輸入輸出個數(shù)。由于磁懸浮系統(tǒng)是一個二階非線性系統(tǒng),選取二階自抗擾控制器對磁懸浮系統(tǒng)進行控制。二階自抗擾控制器由跟蹤微分器、擴張狀態(tài)觀測器、非線性控制率組成,其結(jié)構(gòu)如圖2所示。

圖2 自抗擾控制結(jié)構(gòu)圖
2.1 跟蹤微分器(TD)
TD的作用是對輸入信號進行過渡,同時又提取高精度的微分信號,離散TD方程如下:

式(3)中:T為積分步長;r為速度因子;h0為濾波因子。
r增加時減小信號過渡時間,反之則加大信號過渡時間。濾波因子h0增大,TD濾波效應(yīng)越好,但不能過大,容易造成信號失真。
2.2 擴張狀態(tài)觀測器(ESO)
ESO實時估計系統(tǒng)內(nèi)外總擾動,ESO方程如下:

式(4)中:fal函數(shù)為分數(shù)冪次函數(shù)。
由于分數(shù)冪次函數(shù)在原點斜率較大,為使系統(tǒng)在原點響應(yīng)平緩,對原點附近進行線性化處理,fal函數(shù)表達可參見參考文獻[6]。
2.3 非線性反饋控制率(NLSEF)
NLSEF由非線性函數(shù)組合,其原理方程如下:

式(5)中:e1、e2為系統(tǒng)誤差和誤差的微分。
fal函數(shù)具有小誤差大增益的非線性函數(shù),非線性函數(shù)的引入主要改善系統(tǒng)動態(tài)性能,解決超調(diào)和快速的矛盾。
3 粒子群算法
3.1 粒子群算法基本原理
粒子群算法(PSO)是一種靠粒子之間相互配合智能尋優(yōu)算法,常使用于復(fù)雜系統(tǒng)中的參數(shù)尋優(yōu)中,降低系統(tǒng)參數(shù)整定的困難[13-16]。粒子群算法的粒子運動速度由上一代粒子中的局部最優(yōu)位置和全局最優(yōu)位置決定,體現(xiàn)了粒子的自我認知和群體認知能力。
在一個d維搜索空間中,由n粒子組成的種群X=(X1,X2,…,Xn),其中Xi=(Xi1,Xi2,…,Xid),表示當(dāng)前d維空間中第i個粒子,則下一代粒子的更新公式為:

取如下性能指標(biāo)作為適應(yīng)度函數(shù),用來評價粒子的好壞,即:

式(7)中:t為系統(tǒng)響應(yīng)時間;e(t)為系統(tǒng)誤差。
3.2 粒子群算法的改進
改進粒子群算法是通過粒子適應(yīng)值對粒子速度權(quán)重進行改進。采取粒子適應(yīng)值大時粒子速度權(quán)值大,粒子適應(yīng)值小時粒子速度權(quán)值小的策略,借助Sigmoid函數(shù)對粒子速度權(quán)值進行調(diào)整,其公式表示如下:

式(8)中:b為上一代粒子群中最大適應(yīng)值;a為上一代粒子群中最小適應(yīng)值。
但粒子后期速度變慢,粒子仍然有陷入局部最優(yōu)或者粒子停滯不前的情況,此時,對粒子做出如下改進。
求取粒子適應(yīng)度方差,其公式如下:

當(dāng)2iρ越小時粒子越聚集,當(dāng)2iρ多次小于一定值時(0.05nmax≤ε≤0.1nmax,其中ε為ρσ<2i的次數(shù),nmax為最大迭代次數(shù)。對粒子施加柯西變異,其公式表示如下:

針對常規(guī)粒子群的不足,改進粒子群算法從多個策略出發(fā),當(dāng)粒子多次聚集時,采取柯西變異以提高粒子豐富度,減少粒子陷入局部最優(yōu)的可能。
4 仿真實驗
實驗采用Matlab中Simulink環(huán)境建立系統(tǒng)模型,初始化粒子維度為6,每個維度范圍取[-1 000,0]、[-3 000,-500]、[-150 000,-80 000]、[0,500]、[0,50]、[0,20],慣性因子取0.6,c1、c2取[0,1]之間的隨機數(shù),粒子規(guī)模取50,迭代次數(shù)取100,實驗結(jié)果如下。
改進粒子群算法對ESO增益參數(shù)優(yōu)化曲線如圖3所示。
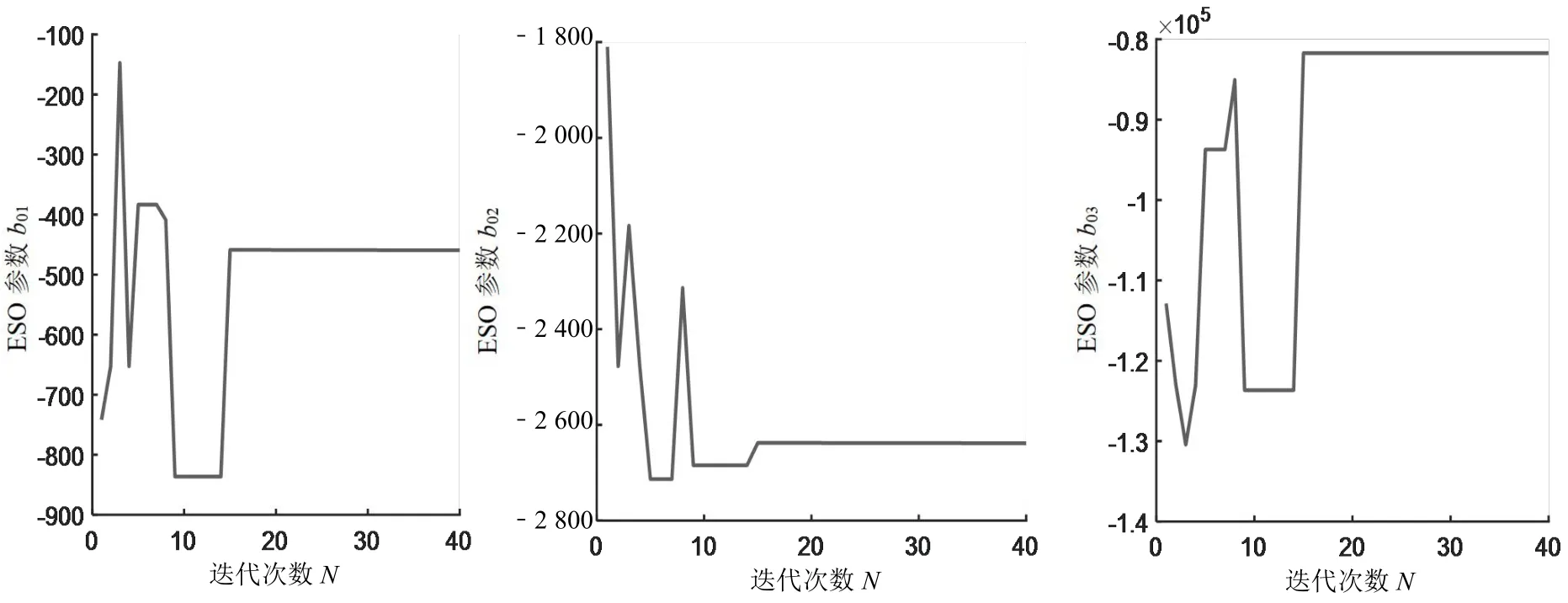
圖3 ESO增益參數(shù)優(yōu)化軌跡
改進粒子群對NLFSE增益參數(shù)和增益b0優(yōu)化曲線如圖4所示。

圖4 NLFSE增益參數(shù)優(yōu)化軌跡和增益b0優(yōu)化軌跡
為了驗證ADRC的抗擾性能,對磁懸浮系統(tǒng)進行了以下3個實驗:①模擬在小球位置跟蹤幅值為1 cm的階躍信號,達到平衡位置后,對小球施加持續(xù)時間0.5 s,幅值為階躍信號的40%脈沖擾動。②改變小球的質(zhì)量,輸入幅值為0.05 cm、周期為6 s的方波信號。③跟蹤幅值為0.5 cm、周期為6 s的正弦信號。
以上實驗仿真結(jié)果如圖5所示。
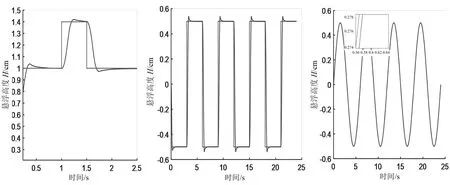
圖5 磁懸浮系統(tǒng)抗擾性能測試仿真圖
ADRC具有實時估計擾動并輸入補償功能,磁懸浮系統(tǒng)受到脈沖擾動時,超調(diào)和響應(yīng)時間基本不受影響,其控制量也比較平緩,而PID不具有補償擾動能力,因此會出現(xiàn)超調(diào),以及控制量出現(xiàn)大的波動。其次,ADRC響應(yīng)時間比PID快,因此在正弦信號和方波信號跟蹤時,ADRC控制輸出基本無滯后跟蹤輸入信號,而PID控制會有一定相位滯后特點。
磁懸浮系統(tǒng)中小球受到外界干擾,其光學(xué)傳感器接受的信號會有噪聲污染,而ADRC中TD具有濾波性能,設(shè)置TD中濾波因子仿真結(jié)果如圖6所示。

圖6 系統(tǒng)濾波測試仿真圖
結(jié)果表明,TD濾波起到很好作用,但隨著濾波因子的增加,系統(tǒng)響應(yīng)時間也在延長,實際控制需合理調(diào)節(jié)TD濾波因子。
5 總結(jié)
ADRC應(yīng)用到磁懸浮系統(tǒng)中起到了很好的控制效果,主要體現(xiàn)了ADRC的優(yōu)越濾波性能和抗擾動性能,對磁懸浮系統(tǒng)易受干擾來講,ADRC起到了很好的控制作用。但參數(shù)眾多整定較麻煩,可以與粒子群算法結(jié)合整定參數(shù),提高參數(shù)調(diào)節(jié)效率,使ADRC應(yīng)用更加廣泛。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
