基于高精度圖像識(shí)別技術(shù)的輸變電設(shè)備巡檢方法研究
2023-01-08 16:49:00閆建平張輝疆李剛張?zhí)炖?/span>
電子設(shè)計(jì)工程 2023年1期
關(guān)鍵詞:檢測(cè)
閆建平,張輝疆,李剛,張?zhí)炖?/p>
(國(guó)網(wǎng)伊犁伊河供電有限責(zé)任公司,新疆伊犁 835000)
近年來,隨著無人機(jī)技術(shù)的不斷發(fā)展,電力網(wǎng)絡(luò)中基于無人機(jī)的智能化巡檢平臺(tái)建設(shè)成為了研究熱點(diǎn)之一[1-6]。對(duì)于高壓輸變電線路、設(shè)備,采用無人機(jī)巡檢可以克服復(fù)雜地形、惡劣天氣的影響,提升巡檢的效率與安全性。無人機(jī)的智能化巡檢主要分為兩個(gè)方面:1)研究無人機(jī)的飛行線路控制;2)研究無人機(jī)采集圖像的傳輸與處理。該文主要針對(duì)第二個(gè)方向展開研究[7-12]。在現(xiàn)有的技術(shù)框架和工作流程下,無人機(jī)負(fù)責(zé)圖像采集,而圖像的處理與識(shí)別仍然在離線狀態(tài)下進(jìn)行。巡檢人員借助于數(shù)字圖像識(shí)別技術(shù),對(duì)無人機(jī)采集的圖像進(jìn)行大批量地分析,找到可能影響線路運(yùn)行的安全隱患。因此,輸電運(yùn)檢人員需要快速、精準(zhǔn)的圖像識(shí)別技術(shù)的支持。
基于以上分析,該文對(duì)圖像的灰度化、亮度均衡、圖像增強(qiáng)等處理流程進(jìn)行了梳理,對(duì)這一過程中所涉及的相關(guān)數(shù)學(xué)變換方法進(jìn)行了研究。此外,為了彌補(bǔ)現(xiàn)有的圖像檢測(cè)算法在電力線路中應(yīng)用的局限性,還引入了一種基于希爾伯特變化的相位一致性圖像檢測(cè)算法;同時(shí),使用AlexNet 卷積神經(jīng)網(wǎng)絡(luò)搭建了圖像識(shí)別系統(tǒng),對(duì)實(shí)際生產(chǎn)環(huán)境下采集的圖像進(jìn)行仿真實(shí)驗(yàn),并給出仿真結(jié)果[13-16]。
1 理論基礎(chǔ)
1.1 圖像預(yù)處理
在使用無人機(jī)進(jìn)行電力設(shè)備巡檢時(shí),由于野外環(huán)境復(fù)雜,圖像的采集受到噪聲和運(yùn)動(dòng)模糊的影響,圖像質(zhì)量無法得到保證。因此,為了消除模糊、畸變等現(xiàn)象對(duì)于圖像質(zhì)量的影響,首先需要對(duì)圖像進(jìn)行預(yù)處理。
在數(shù)學(xué)上,灰度化是將R、G、B三個(gè)顏色通道置為R=G=B的過程,最終使用[0,255]中的某個(gè)數(shù)值作為圖像的灰度值。常用的灰度化方法包括最大值法、平均值法、分量法和加權(quán)平均法。考慮到輸電線路的背景通常為綠色,而人眼對(duì)于綠色識(shí)別的靈敏度較高,因此該文采用加權(quán)平均法對(duì)圖像進(jìn)行灰度化:

然后對(duì)灰度圖像進(jìn)行亮度均衡,在亮度均衡時(shí),通過使用直方圖均值化來避免圖像產(chǎn)生局部過亮或過暗。對(duì)于灰度值為P的原始圖像直方圖與累計(jì)直方圖有:

經(jīng)灰度變換后,根據(jù)灰度變換關(guān)系i→j,對(duì)圖像進(jìn)行修正,即可得到g(m,n)=j。其中,j的計(jì)算方法如下:

隨后進(jìn)行對(duì)比度增強(qiáng)。對(duì)比度增強(qiáng)的主要目的是提升有用信息的視覺效果,同時(shí)抑制噪聲信息的干擾。文中主要包括圖像邊緣、目標(biāo)物體的邊緣增強(qiáng),對(duì)于圖像函數(shù)f(x,y)具體的處理方法如下。
計(jì)算f(x,y)的梯度值上對(duì)幅度的最大變化率:

對(duì)于數(shù)字圖像,可以直接使用差分運(yùn)算替代偏微分:

在對(duì)比度增強(qiáng)后,對(duì)圖像進(jìn)行去噪,降低圖像在生成、傳輸過程中受到的噪聲干擾。文中采用均值濾波的方法,對(duì)f(x,y)濾波后的圖像g(x,y)可表示為:

根據(jù)式(6),對(duì)距目標(biāo)點(diǎn)為單位間距的區(qū)域均值濾波后的像素值可表示為:
1.2 圖像檢測(cè)
在輸變電設(shè)備巡檢場(chǎng)景下,快速、準(zhǔn)確地在圖像中檢測(cè)出輸電線路是完成圖像識(shí)別的關(guān)鍵環(huán)節(jié)。由于電力線路為直線且特征明顯,因此在傳統(tǒng)的圖像檢測(cè)算法上進(jìn)行針對(duì)性地改進(jìn),從而可以取得更優(yōu)的適應(yīng)性。
經(jīng)典的邊緣檢測(cè)算法通常在灰度圖像下實(shí)施,在進(jìn)行邊緣判別時(shí),一般選取圖像發(fā)生灰度突變的位置。灰度圖像的一階導(dǎo)數(shù)是衡量灰度變化的最直接指標(biāo),而二階導(dǎo)數(shù)則是判定圖像零點(diǎn)的條件。對(duì)于灰度圖像g(x,y),首先引入高斯拉普拉斯二階微分算子(LOG):

在g(x,y)上使用LOG 算子:

隨后,在灰度圖像中標(biāo)記出二階導(dǎo)數(shù)為0 的交叉點(diǎn),即可完成圖像的邊緣檢測(cè)。在傳統(tǒng)的邊緣檢測(cè)算法下,可以較好地保證圖像中邊緣的完整性。但由于電力線路多為直線,當(dāng)兩條平行的輸電線路靠近時(shí),容易發(fā)生檢測(cè)混淆。因此,該文引入了一種頻域的圖像分割方法。
根據(jù)信號(hào)分析理論,對(duì)于一維信號(hào),其時(shí)域特征總是出現(xiàn)在諧波分量的最大疊加處。此時(shí),對(duì)于其局部能量,定義一個(gè)相位一致性指標(biāo):

其中,an是圖像經(jīng)傅里葉變換后的n次諧波振幅,E(t)的表示如下:

其中,hx(t)為圖像的希爾伯特變換:

采用圖像的一致性指標(biāo)可以準(zhǔn)確地表征信號(hào)的階梯形態(tài),檢測(cè)圖像中物體的邊緣。對(duì)于圖像,由于其在x、y兩個(gè)方向皆有信號(hào),所以仍需將希爾伯特推廣到二維:

對(duì)于數(shù)字圖像,其二維希爾伯特為離散形式,在像素窗口大小為M×N的區(qū)域進(jìn)行希爾伯特變換:

當(dāng)m、n取7 時(shí):

此時(shí),可以得到基于相位一致性的圖像邊緣檢測(cè)算法的計(jì)算流程,如圖1 所示。

圖1 基于相位一致性的圖像邊緣檢測(cè)算法計(jì)算流程
2 方法實(shí)現(xiàn)
2.1 仿真實(shí)驗(yàn)設(shè)計(jì)
首先需要準(zhǔn)備仿真需要的數(shù)字圖像樣本,該文使用的數(shù)據(jù)樣本全部來自于某供電公司輸電運(yùn)檢工區(qū)的一線生產(chǎn)數(shù)據(jù),由無人機(jī)現(xiàn)場(chǎng)采集而來。文中對(duì)這些數(shù)據(jù)進(jìn)行了預(yù)處理,從中提取的樣本集1 與樣本集2 的像素個(gè)數(shù)分別為167 310 與642 600。其中,樣本集1 包含的樣本數(shù)量為1 213 幅,樣本集2 包含的樣本數(shù)量為1 006 幅。在使用前,為了保證圖像的可用性,通過人工對(duì)輸電線路中的絕緣子、線路金具、導(dǎo)線、地線、接地裝置等組成部分進(jìn)行了標(biāo)記。此外,算法仿真的實(shí)驗(yàn)環(huán)境參數(shù)如表1 所示。

表1 算法仿真環(huán)境參數(shù)
在進(jìn)行圖像識(shí)別時(shí),首先采用上文中的相關(guān)算法對(duì)兩個(gè)樣本集進(jìn)行預(yù)處理。然后,將預(yù)處理后的每個(gè)樣本集按照7∶3 的比例劃分為訓(xùn)練集和測(cè)試集。最終使用AlexNet 卷積神經(jīng)網(wǎng)絡(luò)作為圖像分類的算法,其網(wǎng)絡(luò)的參數(shù)設(shè)置如表2 所示。

表2 網(wǎng)絡(luò)參數(shù)設(shè)置
2.2 仿真結(jié)果
在進(jìn)行輸電圖像的識(shí)別時(shí),需要經(jīng)過圖像的增強(qiáng)、分割、分析三大步驟。為了更優(yōu)地評(píng)估該文算法在每個(gè)環(huán)節(jié)的性能,首先對(duì)算法在各個(gè)環(huán)節(jié)下的耗時(shí)進(jìn)行統(tǒng)計(jì),結(jié)果如表3 所示。

表3 算法各環(huán)節(jié)耗時(shí)以及占比統(tǒng)計(jì)
從表3 可以看出,算法的運(yùn)行時(shí)間會(huì)隨著圖像像素?cái)?shù)的增長(zhǎng)而變長(zhǎng)。在算法的運(yùn)行過程中,用于圖像分割的時(shí)間最長(zhǎng)。表4 和表5 給出了圖像分割、圖像識(shí)別各個(gè)環(huán)節(jié)中的運(yùn)行耗時(shí)所占百分比。從中可以看出,算法運(yùn)行的時(shí)間主要消耗在了希爾伯特變換上,這為后續(xù)算法的運(yùn)行時(shí)間優(yōu)化提供了方向。圖2 為部分樣本的識(shí)別示意圖。

表4 圖像分割各環(huán)節(jié)的運(yùn)行耗時(shí)占比

表5 圖像識(shí)別各環(huán)節(jié)的運(yùn)行耗時(shí)占比
圖2(a)在輸電線路的地線上,準(zhǔn)確地識(shí)別出了防震錘;圖2(b)在輸電線的干擾下,識(shí)別出了絕緣子。為了評(píng)估該文算法的識(shí)別結(jié)果,其還給出了樣本在Canny 邊緣檢測(cè)、二階微分邊緣檢測(cè)等不同圖像檢測(cè)算法下的識(shí)別精度。

圖2 部分樣本的識(shí)別示意圖
從表6 和表7 的識(shí)別結(jié)果可以看出,使用該文方法后,兩個(gè)樣本集的識(shí)別精度分別為94.7%和96.3%。
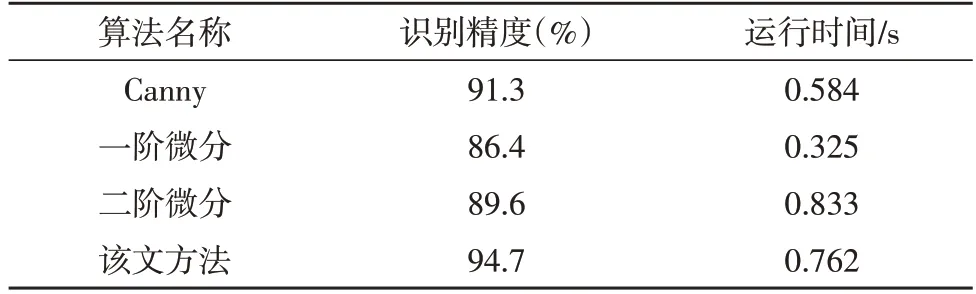
表6 樣本集1在不同圖像檢測(cè)算法下的識(shí)別精度

表7 樣本集2在不同圖像檢測(cè)算法下的識(shí)別精度
3 結(jié)束語
文中所提出的基于相位一致性的圖像邊緣檢測(cè)算法提升了輸電線路圖像識(shí)別時(shí)的精度。對(duì)比計(jì)算結(jié)果數(shù)據(jù)可以看出,隨著樣本像素點(diǎn)的大幅增加,使得算法的運(yùn)行耗時(shí)增大了約兩倍,但算法的識(shí)別精度只提升了1.6%。因此,綜合考慮算法的運(yùn)行時(shí)間和識(shí)別精度,在對(duì)識(shí)別效率要求較高的場(chǎng)景下,可以先對(duì)圖像進(jìn)行降采樣處理。
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48