面向雷達數字化設計與仿真的雷達性能評估研究
2023-01-09 11:27:28陳皓輝李萬玉
火控雷達技術 2022年4期
關鍵詞:環境
盧 冀 陳皓輝 李萬玉
(1.西安電子工程研究所 西安 710100; 2.中國人民解放軍32382部隊 北京 100071)
0 引言
雷達性能評估的一般過程包括評估所需數據的獲取,評估性能指標或體系的構建,評估結果的計算等三大類,分別對應著不同平臺雷達參數的獲取[5],不同場合下雷達評估指標體系的建立[6-7]和基于統計學模型和智能化方法的評估方法[8-9]等當前熱點技術問題。因此,為了能借助雷達數字化設計與仿真技術研究雷達性能評估方法,首先要解決基于該平臺的雷達性能參數獲取及評估方法的問題。
本文面向雷達數字化設計與仿真技術領域,給出雷達性能評估參數及其獲取和計算方法,并系統性的探索雷達性能評估方法,依此實現并驗證一種具體地評估方法,為雷達數字化設計與仿真領域雷達性能評估的研究和持續發展起到拋磚引玉的作用。
1 總體設計
雷達數字化設計與仿真通過構建雷達、目標、雜波、電子戰、傳播環境數學建模并仿真這些模型間的相互信息傳遞,完成對雷達等系統的性能評估。因此,面向雷達數字化設計與仿真的雷達性能評估可以直接從各個數學模型中獲取參數,通過數學計算方法構造性能模型,在仿真時段獲取實時的性能評估結果。值得一提的是,雷達數字化仿真中雷達、目標、雜波電子戰等實物的數字化構建參照真實雷達、目標[2]、體雜波[3]、電子戰[4]的功能組成設計實現,而傳播環境則需要根據雷達與目標、雜波、電子戰間波形交互分別構建,即在數字化雷達設計與仿真中,與雷達實物測試獲得的回波不同,雷達回波參數是雷達與目標、雜波等其它模型間回波參數的線性組合,易得不同環境下雷達的回波參數表示,更便于對各個環境及不同環境的雷達性能進行評估。數字化雷達性能評估的總體系統框架見圖1所示。
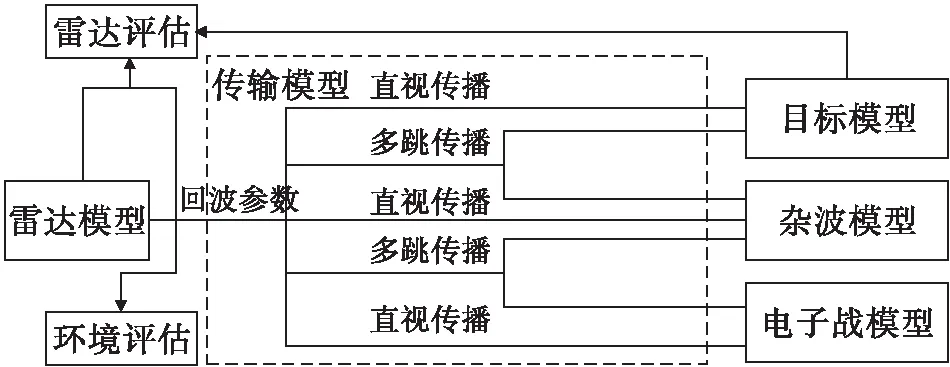
圖1 數字化雷達性能評估系統框架
圖1給出了基于雷達、目標、雜波、電子戰及傳輸模型間的信息交互關系,以及一種基于此的雷達評估和環境評估的構造示意圖,其中雷達評估主要是通過雷達模型及雷達回波參數計算雷達功率相關參數以及通過雷達探測結果和目標屬性評估探測目標結果,環境評估則是評估雷達雜波、電子干擾環境對雷達目標探測干擾程度。
2 評估方法
2.1 雷達評估
雷達數字化設計與仿真對雷達性能評估是以在目標、雜波及電子戰模型下雷達接收有用信號優劣和探測誤差為基礎開展,接收有用信號主要考慮噪聲、目標、雜波和干擾功率,探測誤差以測距、測速、測角誤差為基礎。
噪聲評估即計算設備的噪聲N,可得
N=N0×Bn=KTSBn
(1)
其中No表示大氣白噪聲高綠;K是玻爾茲曼常數,K=1.38×10-23W/Hz·K;Bn為接收機帶寬;Ts為系統噪聲溫度,描述為
3.綜上所述,在時代的變更以及社會經濟發展的推動作用下,我們已經步入了全新的媒體傳播時代,新聞報道質量的高低直接影響著鄉鎮電視臺的生存和發展。
Ts=Ta+Tr+Lr·Te
(2)
其中Ta表示天線溫度;Tr表示接收機溫度;Lr表示射頻傳輸損耗;Te表示接收機噪聲溫度,則有
(3)
其中T′a和La分別表示天線表面溫度白噪聲和天線損耗,可根據理論值和天線指標獲取。
Tr=Ttr(Lr-1)
(4)
其中Ttr表示物理溫度。
Te=T0(Fn-1)
(5)
其中T0和Fn分別表示接收機工作溫度和噪聲系數,Fn一般可測試得到,為已知條件。從而,在數字化仿真中白噪聲功率Pn可以描述為
Pn=(randn(1)·N)2
(6)
其中randn(1)表示一個標準正態分布隨機數。
目標功率PT由三部分組成,目標回波功率Pt,噪聲功率N和欺騙干擾下假目標的功率PG;雜波功率PC一般包括白噪聲功率Pn和地海回波功率Ps,有時候也把非感興趣目標回波功率Pnit統計到雜波功率中,非感興趣目標包括箔條、欺騙干擾及覆蓋干擾。電子干擾功率PI包括欺騙干擾功率PG和覆蓋干擾的功率Pc。限于篇幅,目標功率、雜波功率及電子干擾功率的計算可參考文獻[2-4]。
一般情況下,在統計時,可以根據需求計算SNR、SCR和SIR,或上述兩種以上的組合。一般來說,滿足公式(7)至公式(9)。
(7)
(8)
(9)
為了統計方便,一般用當前波門內的功率Pg表示雷達探測到的目標功率為
(10)
(11)
速度Va一般可以描述[2]為
(12)
其中fres表示多普勒分辨率,則
(13)
PRF表示雷達重復頻率;NCPI表示CPI內脈沖個數;NDOP表示多普勒門的序號。
雷達測距、測速、測角的誤差可以分別用距離測量誤差ΔR,多普勒測量誤差ΔF,方位角測量誤差ΔΘ和俯仰角測量誤差ΔΦ表示,在數字化雷達仿真評估,ΔR可以用一個CPI內各個脈沖的平均時延和目標跟蹤距離Rt之差表示為
(14)
其中τi表示第i個脈沖的時延;c為光速;△F可以用一個CPI內各個脈沖對應的多普勒頻率的平均值和目標跟蹤多普勒頻率Ft之差表示為
(15)
其中Δfi表示第i個脈沖的多普勒頻率。測角誤差可以用每個脈沖對應的平均目標角度和目標跟蹤角度之差表示,則有
(16)
(17)
其中τi、Δfi、Δθ和Δφ是根據目標運動計算得到的相關參數[5-8],Rt、Ft、θt、φt一般為雷達對目標參數的跟蹤預測。
2.2 環境評估
在雷達數字化仿真評估中,雷達工作環境是根據環境分類各個構建的,每個環境的參數獨立變化,便于評估不同環境對雷達目標探測的影響。
雷達數字化構建的典型環境主要有:目標、雜波、電子干擾、傳播環境等,環境評估主要是評估非目標環境對目標環境的影響,在數字化仿真與評估中,不同環境描述的參數是相同的,構成不同環境的函數描述也是一致的,假設目標、雜波、電子干擾和傳播環境的函數描述分別是YT,YC,YI和YM,可以定義環境評估Ei(i=C,I,M)表示非目標環境Yi對目標環境YT的影響,則Ei描述為
Ei=conv(Yi,YT),i=T,C,I,M
(18)
雷達數字化評估中,環境描述參數就是描述雷達發射波形在該環境下的雷達回波的參數,通過式(18)計算不同環境下雷達回波相對目標回波的相關性,就可以對雷達探測目標受環境的影響進行簡單的計算與評估,環境參數的描述見表1所列。
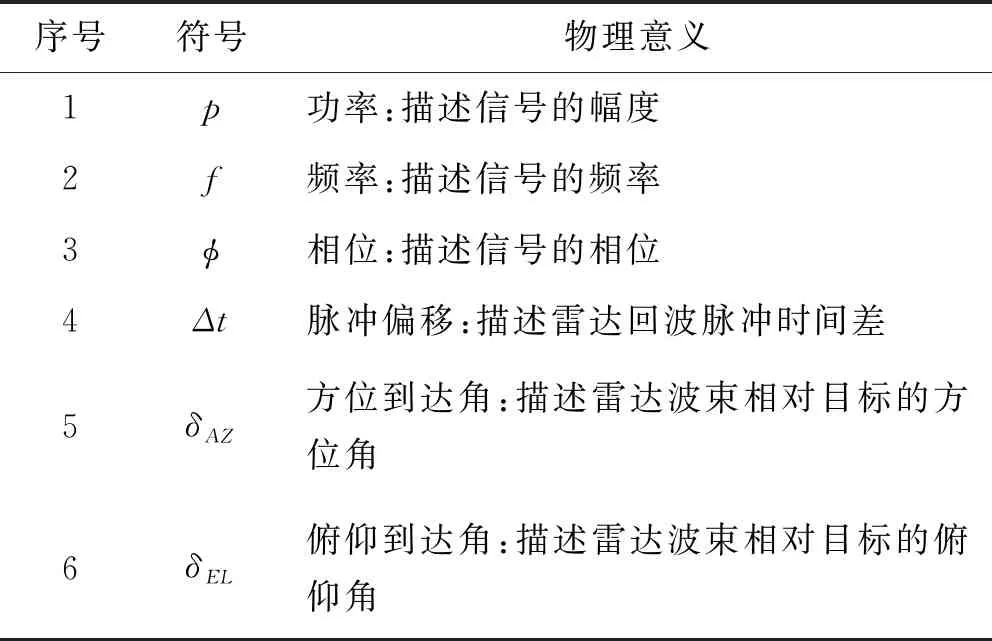
表1 環境參數
表1描述了雷達環境波形的參數,其中p、f、φ和△t用于描述雷達調制波形的參數;δAZ和δEL用于描述雷達環境回波的角度,配合天線方向圖獲取雷達天線收到的雷達信號波形。由這些參數,易知時刻t雷達環境的函數Yi(t)為
Yi(t)=p(t)|ω(δAZ(t),δEL(t))|
ej2πf(t)(t-Δt(t))ejφ(t)ejangle(ω(δAZ(t),δEL(t)))·Fr(t)
(19)
其中ω(δAZ,δEL)和angle(ω(δAZ,δEL))分別表示天線方向圖在δAZ和δEL角度下對應的幅度和角度,p(t)、f(t)、φ(t)、△t(t)、δAZ(t)和δEL(t)描述了環境參數隨時間變化的函數,目標、雜波、電子干擾、傳播環境等環境下對環境參數的主要影響見表2所列。

表2 不同環境下對環境參數的主要影響
3 仿真與驗證
利用Matlab軟件對本文提出的雷達性能評估方法進行了仿真,驗證了本文方法的可行性和有效性。圖2顯示了一段時間T秒內計算得到的白噪聲值;圖3顯示了一段時間T秒內計算的目標回波,其中1到6s為目標疊加噪聲的計算結果,相應地,也根據本文方法計算了目標回波的信噪比;圖4顯示了雜波、電子干擾對雷達探測目標的影響程度,圖4中電子干擾為假目標干擾,因同雷達回波結果類似而影響最大,而雜波環境對目標回波影響較小。

圖2 噪聲計算

圖3 目標回波功率及信噪比計算
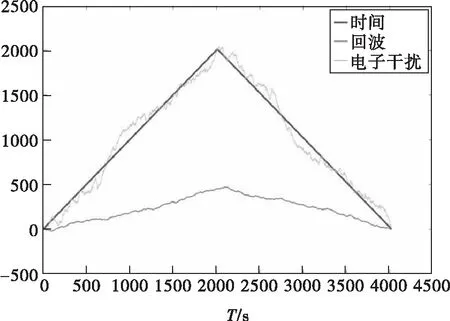
圖4 環境評估結果
4 結束語
針對雷達數字化設計與仿真系統的雷達性能評估問題,從雷達功能及雷達使用環境涉及的雷達、目標、雜波、電子戰等數字模型入手,給出了基于數字模型的雷達性能評估系統的構建方法,重點從雷達和環境兩部分闡述了數字化雷達性能評估中雷達功能及其使用環境的參數獲取和使用問題,基于雷達數字化設計與仿真,提出了一種簡便易行的面向雷達數字化設計與仿真的雷達性能評估方法,以期為雷達數字化設計與仿真中雷達性能評估研究工作起到拋磚引玉的效果。最后通過具體實驗驗證了雷達性能評估方法的有效性和可用性,進一步的研究可繼續在本文方法的基礎上結合具體場景和場景模型實施。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學院學報(2017年2期)2017-04-20 08:44:31
中國環境監察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38