基于多信息源融合的國六重型柴油車OBD-Ⅲ系統設計
2023-01-09 08:42:52俞妍龐海龍卜建國雷威張衡
車用發動機 2022年6期
俞妍,龐海龍,卜建國,雷威,張衡
(1.陸軍軍事交通學院軍用車輛工程系,天津 300161;2.東風商用車技術中心,湖北 武漢 430056)
通訊作者:龐海龍(1977—),男,教授,研究方向為柴油機排放后處理、等離子體應用設計;felixespfr@163.com。
近年來,我國機動車污染物排放標準逐步升級,2018年發布的《重型柴油車污染物排放限值及測量方法(中國第六階段)》中明確規定,車輛應裝備遠程排放管理車載終端,即在實現全部OBD-Ⅱ功能的基礎上增加無線通信裝置的OBD-Ⅲ,將采集的車載信息結合數字地圖,傳送到遠程服務器進行診斷和統一管理[1-2]。目前,OBD-Ⅲ數據采集系統主要是通過OBD診斷結構采集數據,但是汽車制造商并不會將大量數據發送至OBD診斷接口上供人隨意讀取,缺少對車輛的全面了解[3]。本研究基于國家重點研發計劃“柴油機排放后處理系統集成及OBD技術研究”,設計并研制了基于多信息源融合的國六重型柴油車OBD-Ⅲ遠程監控系統,采取多源信息融合的方法采集傳感器節點、發動機動力CAN、車輛OBD診斷接口的數據,信息更全面。目前,該系統已經在不同的重型柴油車上示范運行了10萬 km,采集數據樣本近9 000萬條,其中包含6萬條傳感器數據。并且采集的數據與便攜式排放測試系統(Portable Emission Measurement System,PEMS)實測數據基本一致,為相關部門進行車輛信息化監測、診斷服務提供了重要的技術支持。
1 OBD-Ⅲ系統總體結構設計
OBD-Ⅲ系統的工作過程可以分為數據實時采集、無線傳輸和遠程監控三部分[4]。車載數據采集終端通過與傳感器節點、發動機動力CAN、車輛OBD診斷接口通信,讀取車輛狀態參數、排放數據和故障信息等。車輛行駛時,將通過終端讀取的車輛信息與GPS模塊獲取的車輛位置信息形成數據包,利用移動互聯網以TCP的方式把數據傳輸到遠程的服務器上,并將信息存儲到數據庫[5-6]。通過終端APP或者網頁的形式連接遠程服務器,實現數據的遠程訪問[7]。圖1示出重型柴油車OBD-Ⅲ系統的總體設計方案。
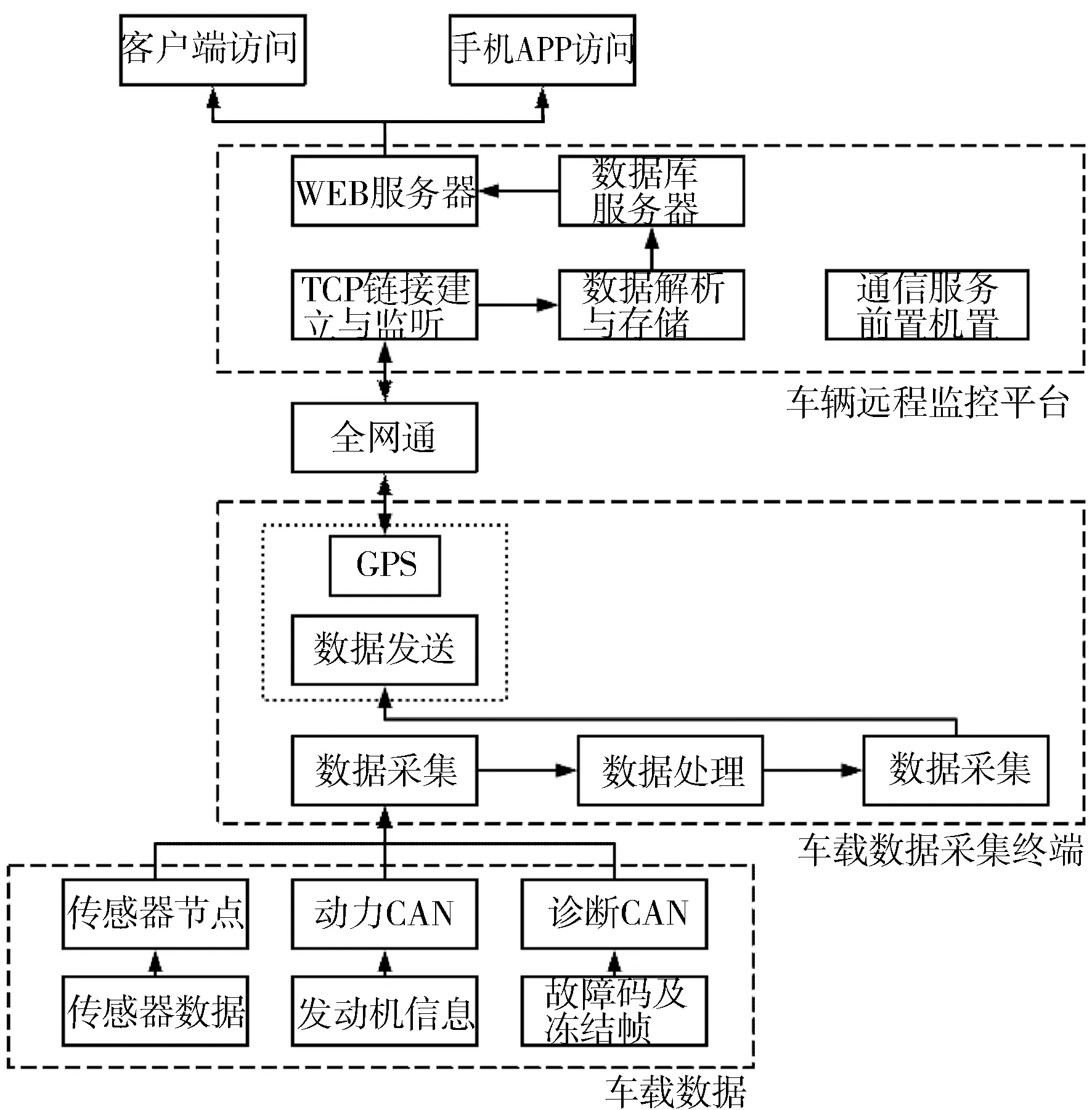
圖1 重型柴油車OBD-Ⅲ系統總體方案
車載數據采集的拓撲結構及信息流動過程可以表述為
O={S,Ls,Lp,Ld,G}。
(1)
式中:O表示車載數據采集終端;S表示傳感器集合;Ls表示傳感器線束集合;Lp和Ld分別表示動力CAN與OBD診斷接口集合;G表示OBD診斷接口網關。
傳感器Si通過測量得到車輛的實時數據,再經過傳感器線束集合Ls傳輸至車載數據采集終端O,故障碼等信息會被發送到Ld上與OBD診斷接口實現傳輸,ECU數據流信息通過動力CAN總線Lp傳輸。具體的傳輸過程見圖2。

圖2 車載數據采集的信息流動過程示意
OBD-Ⅲ系統通過不同的診斷模式對OBD診斷接口發送相應的請求,通過模式02獲取凍結幀,通過模式03讀取故障碼,通過模式09請求車輛信息等[8],具體診斷模式見表1。

表1 OBD的9種診斷模式
2 系統構成
2.1 系統硬件設計
系統硬件組成見圖3。

圖3 系統硬件組成
1) 中央控制模塊
考慮到重型柴油車的OBD診斷接口為CAN通信,因此遠程監控系統終端選用工作穩定可靠的32位STM32H743XIH6車用級芯片。它擁有兩路FDCAN通道,9個UART控制模塊,以及SPI、I2C等通信接口和豐富的I/O資源,CPU頻率可達480 MHz。這些特性能夠很好地滿足需求,對于構建終端設備的穩定性、實時性有很好的效果。
2) 模擬信號采集模塊
本研究安裝LCO152T加速度傳感器采集發動機振動信號。選用AD7768-4BSTZ芯片,提供ADC采集。振動傳感器輸出的信號為峰峰值10~60 mV的電壓信號。
3) CAN通信模塊
國Ⅵ柴油車OBD診斷接口基本采用CAN通信,本控制器設計了兩路CAN數據采集,一路采集OBD接口的診斷CAN數據,一路采集OBD接口的動力CAN數據。選用PCA82C250為CAN收發器芯片,電路原理圖見圖4。
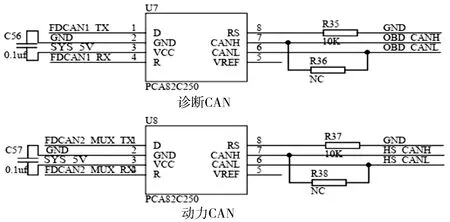
圖4 CAN通信模塊
4) 無線通信模塊
根據系統的數據量以及鏈路需求速率,數據傳輸模組選用FG150。FG150是一款集成了GNSS定位和北斗導航的基于全網通(包括5G)的無線模塊產品。FG150支持移動、聯通、電信三大運營商無線網絡,可實現四網無縫銜接;支持上下行非對稱數據傳輸,上下行數據傳輸速率可達到2.5 Gbps,具有流量大、功耗低、信號強的優點。
2.2 系統軟件設計
2.2.1 不同頻率數據采集的融合設計
對于與排放關聯密切的車輛狀態信息需要以1 Hz的固定頻率進行采集,車輛的故障碼和凍結幀等信息由于出現頻率較低,可以實行周期性采集,而車輛的識別信息如車輛識別號碼(Vehicle Identification Number,VIN)等可采用一次性采集的方式[9]。傳感器采集的信號比如發動機的振動信號為實時數據,需要以10 kHz的頻率進行采集。
根據不同的采集頻率,可以將OBD-Ⅲ系統采集的數據集D描述為
D={Ds,Df,Dp,D0}。
(2)
式中:Ds表示按照10 kHz頻率快速采集的傳感器數據集;Df表示按照1 Hz頻率采集的動力CAN數據集;Dp表示周期性采集的診斷接口數據集;D0為車輛一次性采集的數據集。
汽車發動機很多故障可以通過振動信號故障特征提取進行診斷。本研究在發動機曲軸外部連接桿上安裝加速度傳感器,以10 kHz的采樣頻率采集曲軸振動信號。將采集的振動信號進行傅里葉變換,得到相應的頻域數據[10]。選擇變換窗口為1 s,傅里葉變換計算方法為

(3)
式中,連續傅里葉變換將平方可積的函數f(t)表示成復指數函數的積分或級數形式;F(ω)為f(t)的像函數,f(t)為F(ω)的原函數,原函數和像函數構成一個傅里葉變換對。
根據動力CAN采集的發動機轉速信息和氣缸個數,提取振動信號基頻及其相應的與故障相關的頻段,為判斷發動機抱軸、曲軸斷裂等故障提供數據信息[11]。
2.2.2 基于狀態機的數據傳輸機制
傳統的過程控制流程基本是順序執行的,這種控制測量對于處理外部突發事件的能力較弱,容易出現丟數的現象。本研究采用有限狀態機模型(見圖5)來實現數據傳輸控制。模塊通過UART接口與單片機進行通信,單片機通過發送AT指令來控制模塊建立和斷開網絡連接,將采集融合后的車載數據打包進行逐秒可靠發送。

圖5 基于狀態機的數據傳輸控制
2.3 遠程監控平臺
遠程監控平臺采用B/S架構,即瀏覽器/服務器架構,瀏覽器即是客戶端,用戶通過瀏覽器登陸使用系統,無需進行其他安裝配置。該平臺運行界面見圖6。

圖6 遠程監控平臺運行界面
監控平臺主要對車輛、車載數據采集終端、用戶、廠商和排放管理部門5種實體對象及其聯系進行存儲管理,數據庫設計概念可利用E-R圖來描述(見圖7)。

圖7 遠程監控平臺數據庫E-R圖
3 試驗對象及測試儀器
試驗選取了4輛某型國Ⅵ重型柴油車,其上安裝了自行設計的遠程OBD-Ⅲ系統,在內蒙古牙克石進行了實際道路試驗。
試驗車輛安裝便攜式排放測試系統PEMS進行行駛數據采樣。PEMS設備選用Horiba OBS-one,主要由氣體測量模塊、PN測量模塊、排氣流量計、GPS系統、主機、電源等部分組成[12]。
4 數據處理及方法
圖8示出部分OBD-Ⅲ系統獲得的NOx傳感器濃度與PEMS儀器測得的NOx濃度的逐秒精度對比。由圖8可以看出,雖然二者在逐秒對比時存在一定程度的誤差,但決定系數計算結果高達0.84,說明OBD-Ⅲ系統獲取的數據與PEMS測量結果有較強的線性關系,在整體變化趨勢上是一致的。

圖8 遠程OBD與PEMS的瞬時NOx濃度對比
4.1 利用滑動平均法計算NOx排放
對于N個動態測試數據{yi},不斷逐個滑動地取m個相鄰數據作加權平均來表示平滑數據,其一般算式為
(4)
這些參數的不同取法就形成不同的滑動平均方法。使用滑動平均法對OBD-Ⅲ系統獲取的NOx傳感器濃度進行處理,選取滑動平均窗口m分別為60 s,120 s,300 s時遠程OBD數據與PEMS數據之間的相對誤差(見圖9)進行分析[13]。可以看到,經過滑動平均法處理后相對誤差大幅減少,在滑動平均窗口為60 s時,相對誤差波動除個別工況點以外已經穩定在20%以內,將窗口增加至120 s時,整體波動范圍已不足10%。結果表明,未經過滑動平均法處理時,直接使用逐秒數據進行在用車的實際道路排放水平監測存在一定程度的誤差,而滑動平均法處理能夠降低OBD-Ⅲ數據與PEMS數據的相對誤差,增加數據間的一致性。
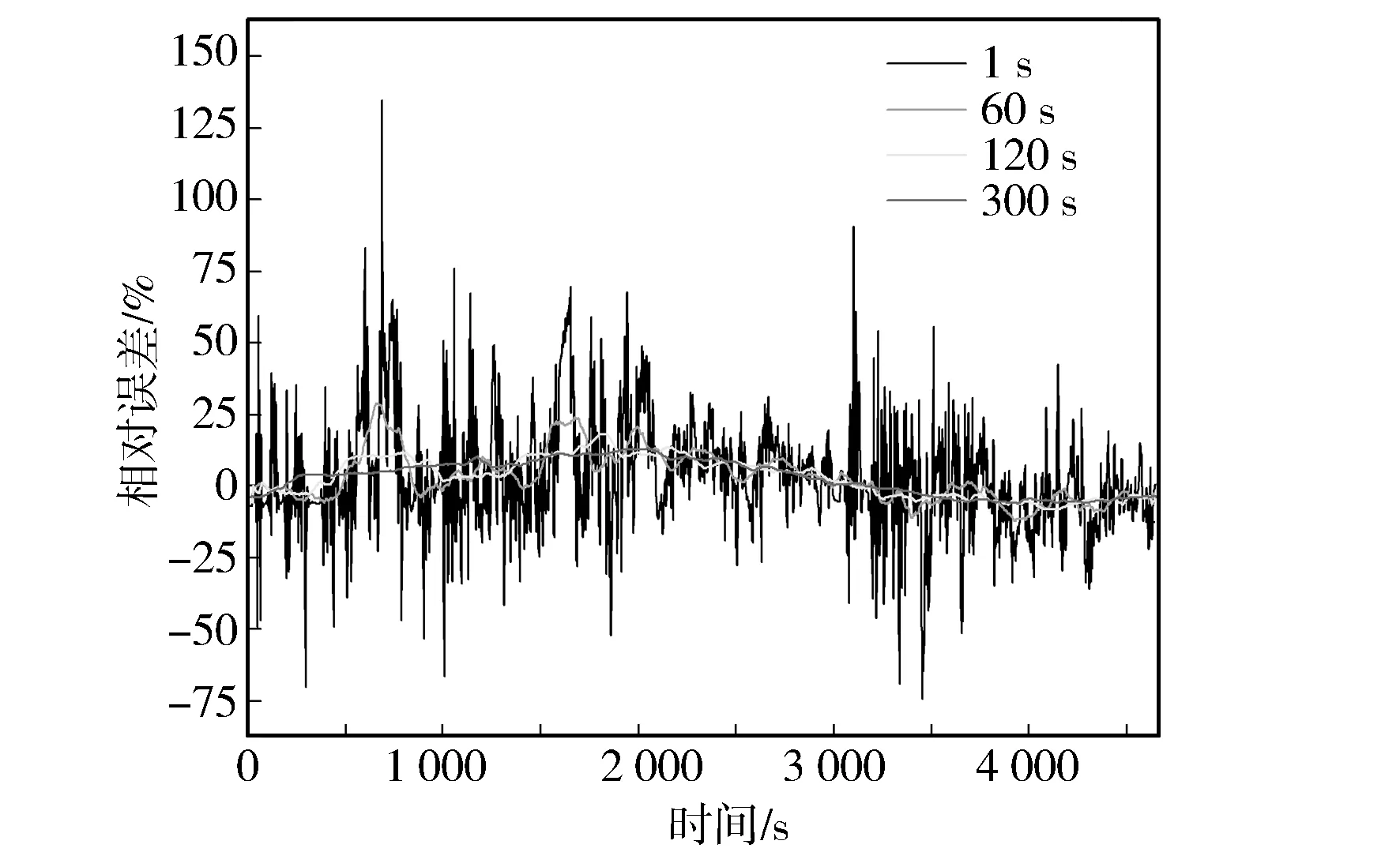
圖9 遠程OBD與PEMS的相對誤差對比
4.2 試驗結果
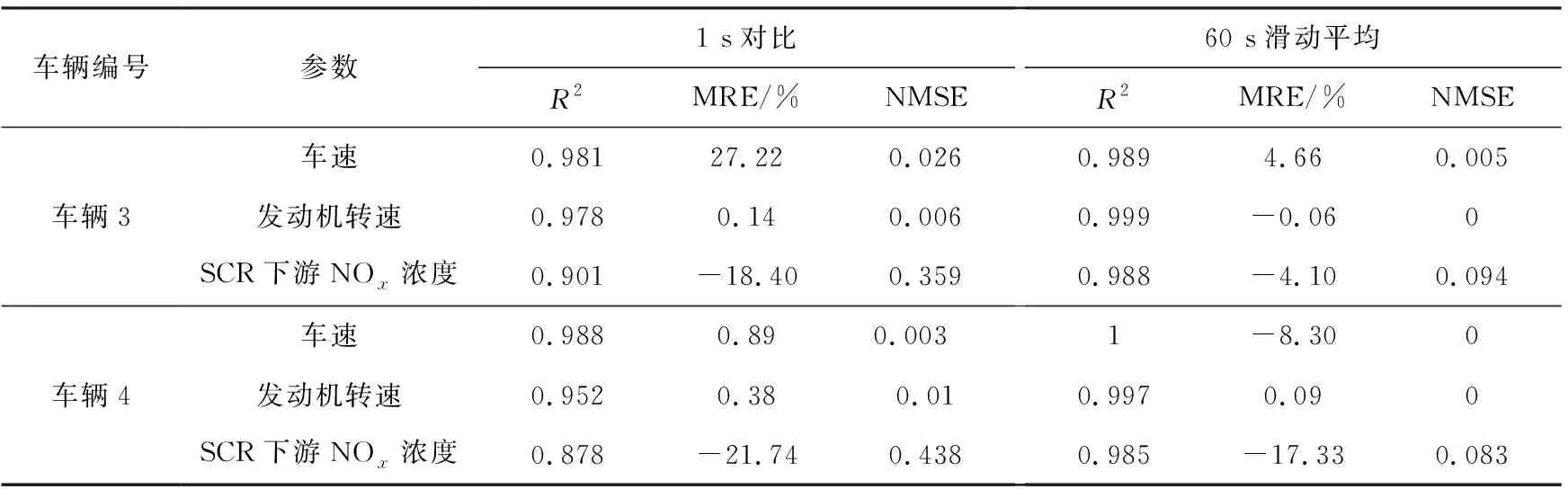
除了NOx濃度之外,還采用同樣的方式評估了其他重要參數通過OBD-Ⅲ和PEMS獲取時的差異,包括車速和發動機轉速。計算這3個變量的決定系數、平均相對誤差(Mean Relative Error,MRE)和歸一化均方誤差(Normalized Mean Square Error,NMSE),結果見表2。

表2 OBD-Ⅲ與PEMS數據對比
續表
計算結果表明,在進行逐秒對比時,OBD-Ⅲ與PEMS測得的發動機轉速、車速顯示出了高度的一致性,決定系數R2都超過了0.95,平均相對誤差和歸一化均方誤差也都較低,說明OBD-Ⅲ數據與PEMS數據在這兩項參數上基本完全吻合。與此相對應的,NOx濃度在逐秒對比時平均相對誤差保持在±25%以內,同時數據間有著很強的相關性(R2基本介于0.8~0.92之間)。通過延長時間序列,OBD-Ⅲ與PEMS數據之間的相關性都有了不同程度的提高。
5 結論
a) 通過設計基于多信息源融合的重型柴油車遠程監控系統,搭建傳感器節點,采集傳感器節點、發動機動力CAN、車輛OBD診斷接口的數據,并使用多源信息融合的方法提取有效特征參數,將數據按照國六法規的要求逐秒發送至服務器,數據可靠詳盡,為后續開展故障診斷、故障預測、排放監管等提供技術支撐;
b) OBD-Ⅲ系統獲取的數據經滑動平均法處理后,與PEMS測量的數據具有較高的一致性,大大提高了評估結果的可靠性;OBD-Ⅲ系統能夠彌補遙測方式精確度不高和PEMS方式覆蓋面小的缺陷,具有實現大樣本車輛的高精度排放監測的潛力;
c) 提出了基于有限狀態機的數據傳輸機制,比起傳統的順序控制流程,基于有限狀態機的數據傳輸機制處理外部突發事件的能力強,可有效解決丟數的現象。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
