基于NARX神經(jīng)網(wǎng)絡(luò)的車用鋰離子電池SOH時(shí)間序列預(yù)測
2023-01-09 09:24:10徐東輝石本改徐麗琴葉雪強(qiáng)王麗娜
車用發(fā)動機(jī) 2022年6期
關(guān)鍵詞:模型
徐東輝,石本改,徐麗琴,葉雪強(qiáng),王麗娜
(1.南昌師范學(xué)院數(shù)學(xué)與計(jì)算機(jī)科學(xué)系,江西 南昌 330032;2.廣東機(jī)電職業(yè)技術(shù)學(xué)院汽車學(xué)院,廣東 廣州 510550; 3.長沙理工大學(xué)汽車與機(jī)械工程學(xué)院,湖南 長沙 410076)
鋰電池具有環(huán)保、比能量大及無記憶效應(yīng)等諸多優(yōu)點(diǎn),目前鋰離子電池廣泛應(yīng)用于新能源電動汽車[1]。然而鋰離子電池在使用中受其健康狀態(tài)(SOH)、功率狀態(tài)(SOP)及荷電狀態(tài)(SOC)等影響,有時(shí)會導(dǎo)致災(zāi)難性的事故發(fā)生,因此精確預(yù)測SOH、SOC等狀態(tài)量對于提高鋰離子動力電池的使用安全性具有重大的現(xiàn)實(shí)意義[2-3]。
目前針對SOH的研究主要為數(shù)據(jù)驅(qū)動方法。徐元中等[4]針對BP網(wǎng)絡(luò)權(quán)值存在局部最優(yōu)的缺陷,采用模擬退火算法(SA)優(yōu)化BP權(quán)值,使其達(dá)到全局最優(yōu),通過試驗(yàn)仿真有效驗(yàn)證了該算法可以有效提高鋰離子動力電池的SOH預(yù)測精度。張任等[5]提出了基于粒子群優(yōu)化RBF神經(jīng)網(wǎng)絡(luò)的預(yù)測算法,建立了電池的熱力學(xué)模型和等效電路模型,提取影響鋰離子電池SOH的關(guān)鍵參數(shù),并對關(guān)鍵參數(shù)進(jìn)行在線實(shí)時(shí)辨識,結(jié)果顯示預(yù)測精度比BP神經(jīng)網(wǎng)絡(luò)提高了20%,時(shí)間也節(jié)省66.7%以上。潘海鴻等[6]通過構(gòu)建表征電池性能衰退的健康指標(biāo)(HI),用極限學(xué)習(xí)機(jī)算法對健康指標(biāo)進(jìn)行訓(xùn)練和預(yù)測,實(shí)現(xiàn)了SOH的在線預(yù)測,并且預(yù)測誤差沒有超過2%。
上述SOH的算法在預(yù)測精度上都得到了有效提高,但很少從鋰電池系統(tǒng)本身固有的非線性動力學(xué)混沌特性方面開展研究,并且所用到的數(shù)據(jù)樣本大多為一維狀態(tài)空間的時(shí)間序列或者單變量數(shù)據(jù)樣本,數(shù)據(jù)樣本包含的信息比較單一,不夠全面。為此本研究針對鋰離子電池SOH時(shí)間序列非線性特性,提出了基于NARX神經(jīng)網(wǎng)絡(luò)的預(yù)測模型,通過對鋰電池系統(tǒng)的混沌動力學(xué)進(jìn)行判定,利用相空間重構(gòu)技術(shù)對試驗(yàn)采集到的一維狀態(tài)空間的時(shí)間序列數(shù)據(jù)進(jìn)行重構(gòu),恢復(fù)鋰電池系統(tǒng)本身的混沌動力學(xué)特性屬性,然后利用NARX神經(jīng)網(wǎng)絡(luò)對重構(gòu)后的時(shí)間序列數(shù)據(jù)進(jìn)行訓(xùn)練和預(yù)測,最后通過仿真試驗(yàn)驗(yàn)證了基于NARX神經(jīng)網(wǎng)絡(luò)預(yù)測模型的有效性。
1 鋰離子動力電池系統(tǒng)混沌判別
要將混沌時(shí)間序列分析法應(yīng)用于鋰離子動力電池系統(tǒng)SOH時(shí)間序列預(yù)測中,首先要判斷鋰離子動力電池系統(tǒng)SOH時(shí)間序列是否為混沌時(shí)間序列,判別方法有K熵法及關(guān)聯(lián)維D2法等[7],本研究采用關(guān)聯(lián)維D2法判別。
在所考察的m維相空間中設(shè)相點(diǎn)之間的歐氏距離為rij(m):
rij(m)=‖Xm(ti)-Xm(tj)‖。
(1)
假設(shè)任給定一標(biāo)度r,則統(tǒng)計(jì)相點(diǎn)之間歐氏距離小于r的點(diǎn)對數(shù)目在所有相點(diǎn)之間點(diǎn)對數(shù)目中所占的比例為

(2)
式中:n為相點(diǎn)數(shù);θ為Heaviside函數(shù)。
關(guān)聯(lián)維D(m)記為
(3)
式(3)不隨m改變,于是得到鋰離子電池系統(tǒng)的關(guān)聯(lián)維數(shù):
(4)
依據(jù)式(4),可計(jì)算鋰離子電池系統(tǒng)的關(guān)聯(lián)維數(shù)為D2>2.3,表明鋰離子電池系統(tǒng)具有混沌特性,則該鋰離子電池系統(tǒng)吸引子的維數(shù)為D2,可對鋰離子電池系統(tǒng)SOH時(shí)間序列進(jìn)行預(yù)測。
2 多變量時(shí)間序列重構(gòu)
在混沌理論中單變量時(shí)間序列和多變量時(shí)間序列的預(yù)測原理都是相空間重構(gòu)理論,而在一定程度上,單變量時(shí)間序列可以認(rèn)為是多變量時(shí)間序列的一種特例,因此可以將單變量時(shí)間序列的延時(shí)重構(gòu)用于多變量時(shí)間序列中[8]。
對于鋰離子電池,假設(shè)SOH的時(shí)間序列為{x(i),i=1,2,…N},根據(jù)Takens理論[9-10],若時(shí)間延遲τ和嵌入維數(shù)m具有確定值時(shí),則鋰離子電池健康狀態(tài)(SOH)時(shí)間序列相空間相點(diǎn)可表示為
(5)
式中:m為嵌入維數(shù);τ為時(shí)間延遲。
Y(j)為相空間中的點(diǎn),相點(diǎn)總數(shù)M滿足條件:
M=N-(m-1)τ。
(6)
假設(shè)X1,X2,…XN為M維多變量時(shí)間序列,其中任意時(shí)間序列可表示為Xi=(x1,i,x2,i,…xm,i),(i=1,2,…N),由此可知,當(dāng)M=1時(shí)為單變量序列。
因此,延遲相空間重構(gòu)相點(diǎn)如下:
Vn=(x1,n,x2,n-τ,…,x1,n-(m1-1)τ,…,
xM,n,xM,n-τM,…,xM,n-(mM-1)τM)。
(7)

x1,i+1=Φ1(Vi),x2,i+1=
Φ2(Vi),…,xM,i+1=ΦM(Vi)。
(8)
τ和m的選取對于相空間重構(gòu)非常重要,為此Kim等于1999年提出了用于計(jì)算τ和m兩個(gè)參數(shù)的C-C方法。由于C-C方法具有操作方便、易實(shí)現(xiàn)及抗噪強(qiáng)等特點(diǎn),并且對于小數(shù)據(jù)樣本具有較好的可靠性,因此選擇C-C方法計(jì)算τ及m相空間重構(gòu)兩個(gè)重要參數(shù)。
為方便計(jì)算,假定τs為鋰離子電池系統(tǒng)試驗(yàn)數(shù)據(jù)采集時(shí)間間隔,τd=tτs為延遲時(shí)間,τw=(m-1)τd為延遲時(shí)間窗口,τp為平均軌道周期(τw≥τp)。
C-C方法的具體步驟如下。
1) 計(jì)算鋰離子電池系統(tǒng)給定時(shí)間序列的標(biāo)準(zhǔn)差σ。
2) 通過下式可得S(t),ΔS(t)及Scor(t)3個(gè)變量的值:

(9)
(10)
(11)

3) 依據(jù)ΔS(t)的第一個(gè)極小值,尋找時(shí)間序列獨(dú)立的第一個(gè)局部最大值,通過τd=τs可得第一個(gè)局部最大時(shí)間。
同理,用SCOR(t)的最小值尋找時(shí)間序列獨(dú)立的第一個(gè)整體最大值時(shí)間窗口τw=τs。
利用上述3個(gè)步驟計(jì)算可得τ=3,m=8,利用此結(jié)果對采集到的一維SOH數(shù)據(jù)樣本進(jìn)行相空間重構(gòu),將鋰電池系統(tǒng)恢復(fù)成8維非線性狀態(tài)空間,進(jìn)而呈現(xiàn)出鋰電池系統(tǒng)固有的多維非線性狀態(tài)空間。
3 基于NARX神經(jīng)網(wǎng)絡(luò)的預(yù)測模型建立
3.1 NARX神經(jīng)網(wǎng)絡(luò)
NARX神經(jīng)網(wǎng)絡(luò)是一種非線性自回歸神經(jīng)網(wǎng)絡(luò),具有動態(tài)反饋性,即其輸出結(jié)果是當(dāng)前外部輸入和歷史輸出結(jié)果的非線性函數(shù),由于網(wǎng)絡(luò)結(jié)構(gòu)中存在時(shí)延以及反饋,因此NARX神經(jīng)網(wǎng)絡(luò)具有記憶和聯(lián)想功能以及較強(qiáng)的適應(yīng)能力,很適合用于非線性時(shí)間序列的預(yù)測[11-12]。NARX網(wǎng)絡(luò)模型可表示如下:
y(t)=f(y(t-1),y(t-2),…y(t-ny),
u(t-1),u(t-2),…u(t-nu))。
(12)
式中:y(t)為目標(biāo)向量;u(t)為外部輸入向量;f為非線性函數(shù);y(t-1),y(t-2),…y(t-ny)為時(shí)延后的期望目標(biāo)向量;u(t-1),u(t-2),…u(t-nu)為時(shí)延后的外部輸入向量。
NARX神經(jīng)網(wǎng)絡(luò)的隱層激活函數(shù)f1和輸出層激活函數(shù)f2分別表示如下:

(13)
f2(x)=x。
(14)
NARX神經(jīng)網(wǎng)絡(luò)訓(xùn)練采用的是Levenberg-Marquards算法,假設(shè)一個(gè)最大位移作為區(qū)域半徑,然后在該區(qū)域內(nèi)尋找代價(jià)函數(shù)的極小值點(diǎn),若目標(biāo)代價(jià)函數(shù)值增大,則調(diào)整該區(qū)域半徑改變范圍,繼續(xù)求解;若目標(biāo)代價(jià)函數(shù)值減小,則繼續(xù)迭代計(jì)算[13-15]。
為了評價(jià)NARX神經(jīng)網(wǎng)絡(luò)模型的模擬性能,采用以下3種誤差模型對NARX模型進(jìn)行指標(biāo)評價(jià):平均絕對誤差(MAE)、均方根誤差(RMS)及平均相對誤差(MSE),表達(dá)式如下:
(15)
(16)

(17)

3.2 預(yù)測模型建立
本研究提出基于NARX神經(jīng)網(wǎng)絡(luò)的建模方法,對輸入變量進(jìn)行相重構(gòu)空間恢復(fù)系統(tǒng)的多維非線性狀態(tài)空間時(shí)間序列,并將其輸入NARX神經(jīng)網(wǎng)絡(luò),獲得最終的SOH預(yù)測值。按上述原理建立基于NARX神經(jīng)網(wǎng)絡(luò)的預(yù)測模型,其結(jié)構(gòu)如圖1。

圖1 NARX的預(yù)測模型結(jié)構(gòu)NARX預(yù)測模型算法實(shí)現(xiàn)的過程如下。
步驟1:采用灰色關(guān)聯(lián)從自主試驗(yàn)平臺鋰離子電池退化狀態(tài)監(jiān)測到的數(shù)據(jù)中選擇NARX預(yù)測模型的輸入變量。
步驟2:采用C-C法確定嵌入維數(shù)m和時(shí)間延遲τ兩個(gè)相空間重構(gòu)中重要的參數(shù),經(jīng)計(jì)算最后確定τ=3,m=8。將上述結(jié)果應(yīng)用于對試驗(yàn)采集到的一維試驗(yàn)數(shù)據(jù)重構(gòu)中,由此可假定NARX預(yù)測模型的訓(xùn)練樣本集為{xi,yi},xi∈RN×M,yi∈RN×L,測試樣本集為{xt,yt},xt∈RN×M,yt∈RN×L。
步驟3:利用重構(gòu)后的訓(xùn)練樣本集{xi,yi},xi∈RN×M,yi∈RN×L訓(xùn)練NARX模型,利用測試樣本集{xt,yt},xt∈RN×M,yt∈RN×L對 NARX模型進(jìn)行預(yù)測,得到最終的SOH輸出值。
4 試驗(yàn)與分析
在試驗(yàn)過程中使用的試驗(yàn)數(shù)據(jù)集主要是通過官網(wǎng)下載到的NASA PCoE研究中心在愛達(dá)荷州國家試驗(yàn)室測試獲得的B5和B6電池各168組數(shù)據(jù)。自主試驗(yàn)過程中選用2個(gè)額定容量為2 A·h的18650型號的鋰離子電池(B5和B6)為研究對象,在常溫(25 ℃)條件下,完成鋰離子電池(B5和B6)的充電、放電和電阻測量等試驗(yàn)。
充電試驗(yàn):先以1C(2 A)恒流進(jìn)行充電,當(dāng)鋰離子電池(B5和B6)的電壓達(dá)到4.2 V時(shí),再以恒壓充電,直到I≤20 mA時(shí)停止充電,在試驗(yàn)過程中實(shí)時(shí)記錄電池終端電壓、電流、溫度、充電器電壓及電流等數(shù)據(jù)。
放電試驗(yàn):先以2 A恒流放電,當(dāng)電池B5和B6的電壓分別降至2.7 V和2.5 V時(shí),停止放電。在試驗(yàn)過程中實(shí)時(shí)記錄電池終端電壓、電流、溫度、充電器電壓及電流等數(shù)據(jù)。
重復(fù)上述充放電試驗(yàn)直到電池的實(shí)際容量下降到額定容量的70%,停止老化試驗(yàn)。
以上充放電操作一次記為一次循環(huán)過程,整個(gè)試驗(yàn)共完成200次循環(huán),試驗(yàn)過程中數(shù)據(jù)的采用頻率設(shè)置為1 Hz,實(shí)時(shí)同步采集電池終端電壓、輸出電流、溫度、充電器電壓和電流、時(shí)間等數(shù)據(jù),并且同時(shí)記錄B5和B6電池的最大可用容量。采用EIS方法獲取電池阻抗,頻率掃描范圍為0.1~5 Hz。
相空間重構(gòu)自主試驗(yàn)平臺采集電池退化狀態(tài)數(shù)據(jù),將重構(gòu)后的電池退化狀態(tài)數(shù)據(jù)中的前80組數(shù)據(jù)與NASA PCoE研究中心的B5電池前80組數(shù)據(jù)一起作為NARX神經(jīng)網(wǎng)絡(luò)的訓(xùn)練集。取上述相空間重構(gòu)獲得的數(shù)據(jù)中的后88組數(shù)據(jù)與NASA PCoE研究中心的鋰離子電池B5后88組數(shù)據(jù)一起作為NARX神經(jīng)網(wǎng)絡(luò)的測試集,B5電池的失效閾值為0.727 4。圖2示出鋰離子電池B5的SOH預(yù)測結(jié)果,圖3示出B5預(yù)測結(jié)果相對誤差。
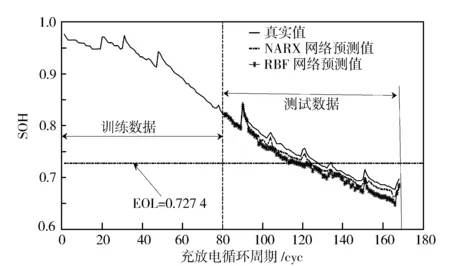
圖2 鋰離子電池B5的SOH預(yù)測結(jié)果
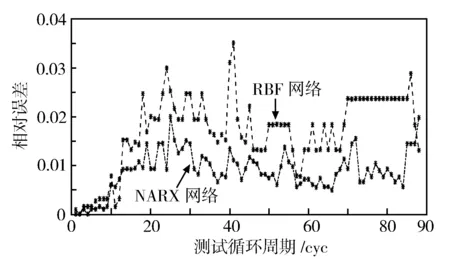
圖3 鋰離子電池B5的SOH預(yù)測結(jié)果相對誤差
同理,選取B6電池前60組數(shù)據(jù)及利用自主試驗(yàn)平臺鋰離子電池退化狀態(tài)監(jiān)測到的數(shù)據(jù),通過相空間重構(gòu)后得到的前60組數(shù)據(jù)一起作為NARX神經(jīng)網(wǎng)絡(luò)的訓(xùn)練集。同樣取上述相空間重構(gòu)獲得的數(shù)據(jù)中的后108組數(shù)據(jù)與NASA PCoE研究中心的B6電池后108組數(shù)據(jù)一起作為NARX神經(jīng)網(wǎng)絡(luò)的測試集,B6電池的失效閾值設(shè)置為0.68。由于對采集到的試驗(yàn)數(shù)據(jù)重構(gòu)后得到8維的時(shí)間序列數(shù)據(jù),因此RBF神經(jīng)網(wǎng)絡(luò)模型輸入層選擇為8個(gè)神經(jīng)元,通過不斷試驗(yàn)最終確定中間層神經(jīng)元個(gè)數(shù)為16個(gè),輸出層為1個(gè)。最終確定RBF神經(jīng)網(wǎng)絡(luò)模型為8-16-1結(jié)構(gòu)形式。圖4示出鋰離子電池B6的SOH預(yù)測結(jié)果。
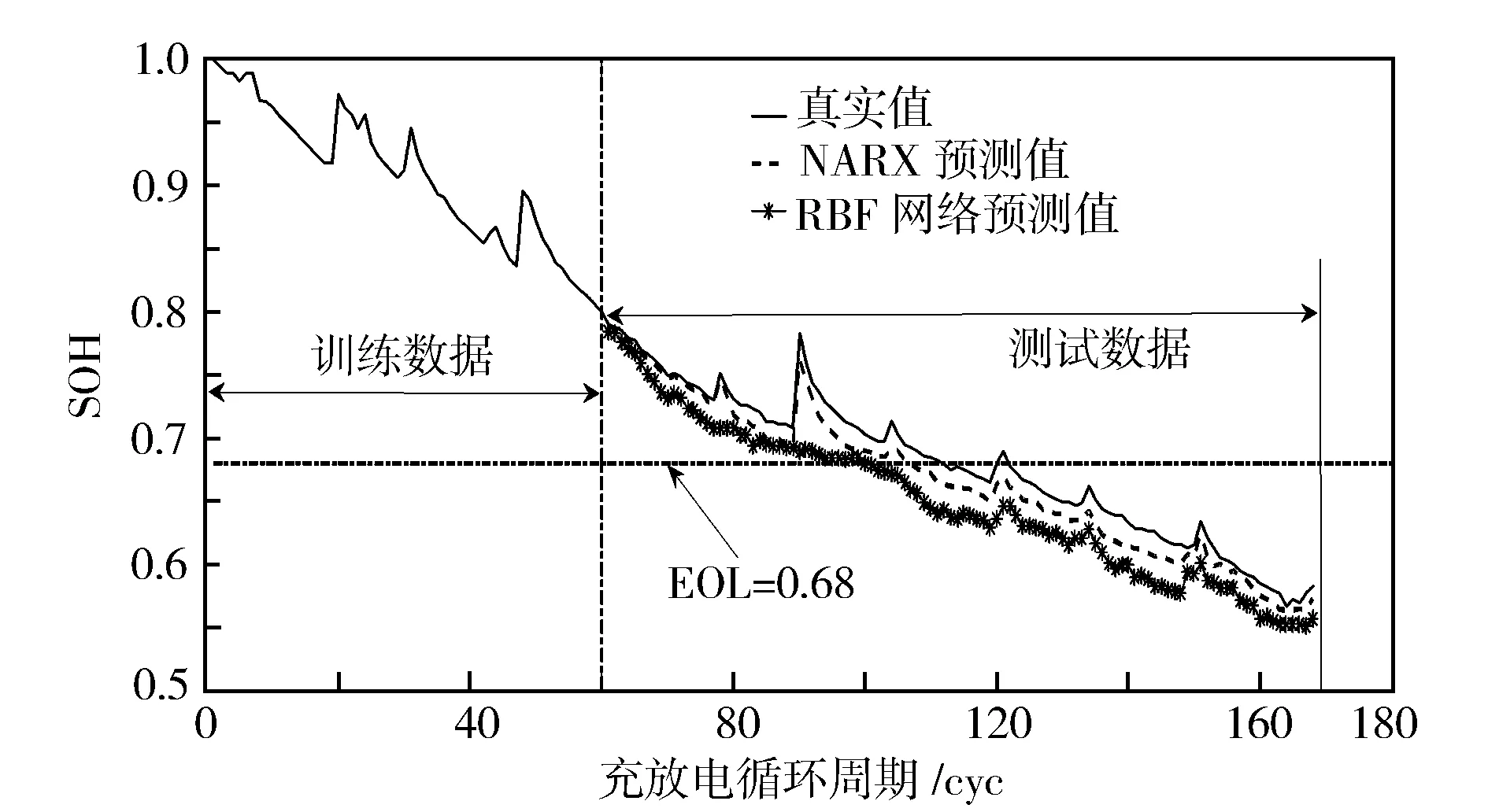
圖4 鋰離子電池B6的SOH預(yù)測結(jié)果
通過表1的SOH預(yù)測結(jié)果對比,可知NARX模型比RBF模型的SOH預(yù)測值平均相對誤差提高了2個(gè)百分點(diǎn),均方根誤差提高了近6個(gè)百分點(diǎn)。進(jìn)一步說明了本研究提出的NARX模型具有較高的精確度及穩(wěn)定性,更強(qiáng)的非線性預(yù)測能力。
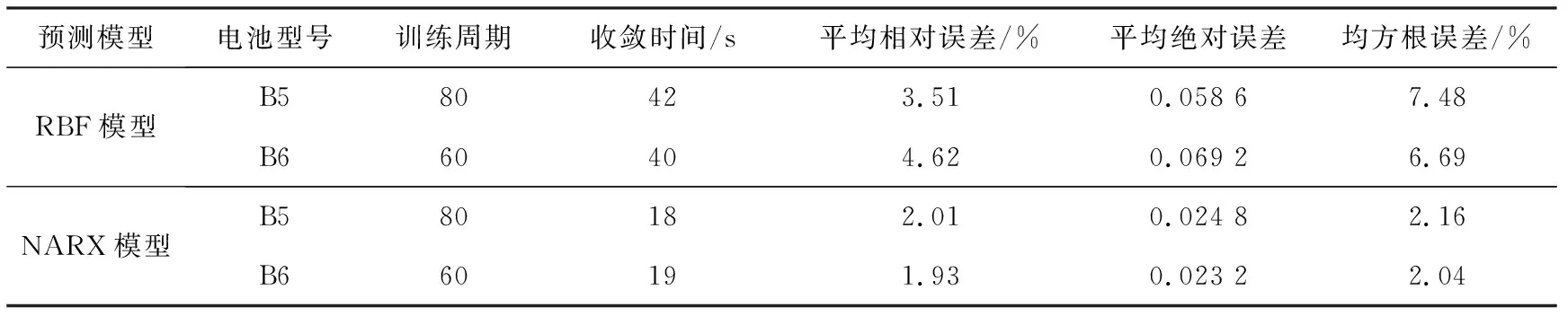
表1 鋰離子電池B5及B6的SOH預(yù)測誤差對比
5 結(jié)束語
鋰離子電池系統(tǒng)各參數(shù)具有慢時(shí)變特性,準(zhǔn)確預(yù)測健康狀態(tài)存在較大的難題,提出了NARX神經(jīng)網(wǎng)絡(luò)預(yù)測模型,用于對非線性狀態(tài)下的鋰離子電池SOH時(shí)間序列的預(yù)測。
通過混沌判別表明了鋰離子電池系統(tǒng)具有混沌特性,采用相空間重構(gòu)技術(shù)恢復(fù)了鋰離子電池系統(tǒng)固有的多維非線性狀態(tài)空間,最后利用重構(gòu)后得到的數(shù)據(jù)對NARX模型進(jìn)行了訓(xùn)練和測試。
通過仿真結(jié)果可知NARX模型算法的SOH預(yù)測結(jié)果的相對誤差比RBF網(wǎng)絡(luò)提高了近6個(gè)百分點(diǎn)。表明了本研究提出的基于NARX神經(jīng)網(wǎng)絡(luò)的SOH預(yù)測算法具有較高的預(yù)測精度,相空間重構(gòu)技術(shù)有利于提高NARX模型的預(yù)測精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
