分段供電雙三相永磁同步直線電機電流解耦與擾動抑制
2023-01-10 07:10:10郭科宇李耀華史黎明
電工技術學報 2022年24期
郭科宇 李耀華 史黎明
分段供電雙三相永磁同步直線電機電流解耦與擾動抑制
郭科宇1,2李耀華1,2史黎明1,2
(1. 中國科學院電力電子與電力驅動重點實驗室(中國科學院電工研究所) 北京 100190 2. 中國科學院大學 北京 100049)
為減少電機輸入端電壓和驅動變流器容量,長定子永磁同步直線電機常采用定子分段方式供電,但是定子分段永磁同步直線電機會產生定子電感不平衡并導致電流耦合、動子過分段造成反電動勢擾動和推力波動等問題。首先,推導了分段供電雙三相直線電機電流控制環中電感不平衡導致的電流耦合和反電動勢擾動的表達式,設計了一種反饋解耦補償器對電流進行解耦,采用動態相對增益矩陣(DRGA)對參數失配下的解耦程度進行分析。在此基礎上,設計一種二階滑模擾動觀測器,對由過分段導致的反電動勢擾動與電機參數失配進行補償,增強了電流環的抗擾特性,實現了精確的電流跟蹤,有效降低了電機的推力波動。實驗結果驗證了電流解耦與擾動抑制有效性。
電流控制 擾動 解耦 分段供電 雙三相永磁體同步直線電機
0 引言
雙三相分段供電永磁同步直線電機(Section PowerSupply Permanent Magnet Linear Synchronous Machine, SP-PMLSM)采用永磁體勵磁,具有推力密度高、響應速度快、控制品質好等優點[1-5],同時單相容量低,容錯性能好[6-10],適用于需要大功率、長行程、高加速的場合。
然而,由于直線電機初級繞組分段,存在明顯的電感不平衡現象[11-14],導致dq坐標系下的電流耦合項除了直流成分還存在交流分量,動子在穿過定子供電分段過程中產生的永磁體反電動勢也會隨著耦合面積變化。以上問題導致電機的dq軸電流難以準確跟蹤給定值,造成推力波動。
國內外學者對永磁同步電機的電流控制方法進行了深入的研究[15-24]。電流控制的方法主要分為基于模型預測的方法[16-18, 22]和基于PI控制器的改進方法[19-24]。文獻[16]采用預測電流控制在ab坐標系下對直線電機進行控制,有效降低了模型預測時的計算復雜度。文獻[17]將多步連續電流預測控制方法中的優化轉換成二次規劃問題以處理電流電壓超限,該方法需離線計算一定速度范圍內的模型更新參數,沒有考慮在線運行參數失配的問題。文獻[18]通過增加擾動觀測器對電流預測控制器中的擾動進行補償,對直線電機的低頻擾動抑制效果較好。文獻[19]設計了基于內模擾動觀測器的無差拍電流預測控制器,可以應對參數攝動及反電動勢擾動的問題,適用于電機恒速運行的情況。文獻[20]采用準比例諧振控制器對空心線圈PMLSM的電流進行控制,消除了電流中的特定次諧波。同時,設計自抗擾控制器以解決參數失配問題。但是,PR控制器的設計僅能消除特定次諧波,對速度變化較大的電機,其帶寬有限。文獻[21]對電流環設計自抗擾控制器,對永磁同步直線電機的耦合項與反電動勢項統一視作擾動,采用線性擴張狀態觀測器(Extended State Observer, ESO)進行補償,取得了較好效果。文獻[22]對永磁同步直線電機采用模型預測電流控制,將反電動勢與耦合項的統一視為擾動補償到預測模型中,再通過誤差矯正的方式保證電流控制的魯棒性。
以上研究多集中在短初級直線電機中,而在分段供電長初級電機中存在過分段效應引起反電動勢的迅速變化、電流波動,進而導致推力波動。文獻[23-24]對定子分段式永磁同步直線電機由過分段導致的速度波動問題進行研究。電流控制器采用了PI調節器,且將動子穿過分段時的反電動勢視作線性變化,前饋到電流環中。該方法是一種近似方法,不能完全反映反電動勢在過分段時的非線性特征,影響了電流控制的性能。
本文采用矢量空間解耦理論推導了雙三相SP- PMLSM在dq坐標系下的數學模型,分析了電感不平衡和過分段效應在電流環中產生的耦合項與反電動勢擾動的特性。采用電流反饋解耦[25-26],對電流環中的耦合項設計反饋解耦器(Feedback Decoupling, FBD),采用動態相對增益(Dynamic Relative Gain Array, DRGA)評估在參數失配時的解耦性能。在FBD的基礎上提出了基于二階滑模[27-28]的擴張狀態觀測器(Second-Order Sliding Mode Extended State Observer, SOSM-ESO),將觀測電流環中的擾動補償到電流環中,可有效抑制電流波動和推力波動。
1 雙三相SP-PMLSM的數學模型
雙三相SP-PMLSM的結構及繞組形式如圖1a所示。電機動子由永磁體組成,電機定子被分為個分段,每個定子分段的雙三相繞組均采用雙中性點連接,如圖1b所示。其中奇數號定子段由雙三相逆變器A供電,偶數號定子段由雙三相逆變器B供電。各分段由雙邊定子鐵心組成,單分段內繞組串聯連接,如圖1a所示。各個定子分段通過軌旁開關與相應的逆變器相連,逆變器僅對與動子耦合的定子分段供電。定子的分段引入了由靜態邊端效應導致的電感不平衡,動子在穿過定子分段時,與定子電樞繞組交鏈的永磁磁鏈幅值不再是常量,而是隨著動子與相應定子分段的耦合程度而改變[29],電感不平衡與過分段效應均會影響電機的電流控制。

圖1 雙三相SP-PMLSM的結構及繞組形式
考慮電感不平衡和過分段效應的相空間數學模型[29]為
式中,s、s、fs分別為雙三相定子電壓、電流和永磁體磁鏈向量,s=[ABCDEF]T,s=[ABCDEF]T,fs=[fAfBfCfDfEfF]T;為相電阻;s為電感矩陣;、em分別為動子速度、位移與推力;p為電機極距。雙三相SP-PMLSM的主要參數見表1。
表1 雙三相SP-PMLSM的主要參數

Tab.1 The key parameters of dual-three phase SP-PMLSM
2 電機的電流耦合與擾動分析
采用雙三相Park變換(空間矢量解耦)將電機中的電壓、電流、磁鏈等相物理量分別映射到與機電能量轉換有關的由d軸與q軸張成的基波子平面,和與機電能量轉換無關的其他子平面,即5次諧波子平面(z1軸與z2軸張成z1-z2子平面)與0序子平面(o1軸與o2軸張成o1-o2子平面)[30]。本文將此三個子平面合稱為dq坐標系。由于電機采用雙中性點連接,因此系統中不存在0序分量的電流,因而在以下分析中均不考慮電流的0序分量。
在相空間電壓方程中,電感矩陣s為6階方陣,按照電樞繞組空間相位差,s中的各個元素可分為五類,即相自感、120°互感、30°互感、90°互感和150°互感。對于旋轉雙三相電機這五類電感各自內部相等。對于SP-PMLSM,靜態邊端效應導致電機中的120°互感、90°互感和150°互感不再滿足內部相等,因此電感矩陣不平衡。SP-PMSLM各類電感間的關系見表2,其中L表示相與相之間的互感,,∈{A, B, C, D, F},A~F為相序。
表2 雙三相SP-PMLSM各類電感的關系

Tab.2 The relationships between the inductances of dual-three phase SP-PMLSM
將相空間下的電感矩陣s分解為平衡分量sb與不平衡分量sg的和,即s=sb+sg,其中sb與sg分別為

式中,1~5分別為平衡分量中的5類電感,其中150°互感與30°互感互為相反數,即3+5=0;90°互感4=0。2g、4g和5g分別為120°互感、90°互感和150°互感中的不平衡分量。
雙三相Park矩陣sr為(不考慮0序分量)

式中,為永磁體d軸所在的電角度,p/p。
采用Park矩陣sr將式(1)變換到dq坐標系為

式中,dq、dq、fdq分別為dq坐標系下的電流、電壓以及永磁體磁鏈,dq=[dqz1z2]T,dq=[dqz1z2]T,fdq=[fdfqfz1fz2]T,下角標為d和q的物理量分別表示基波子平面d軸和q軸分量,下角標z1和z2分別表示5次諧波子平面z1軸和z2軸分量。
假設系統工作在近似穩態下,即ddq/d≈0,則式(4)可化為

式中,p/pbcpdq與p/pgcpdq分別為電感矩陣中的平衡分量與不平衡分量導致的耦合項。
將式(5)中矩陣bcp展開,則有


2.1 雙三相SP-PMLSM電流耦合分析
式(6)中bcp矩陣表明,電感矩陣中的平衡分量sb經過Park變換后使得d軸與q軸電流相互影響,同時z1軸與z2軸之間亦存在耦合。由于電機機械時間常數遠大于電氣時間常數,因此在一個控制周期內可近似認為速度不變,因而這種耦合是近似直流的。另外,基波子平面中的電流與5次諧波子平面中的電流不會通過sb相互耦合。
由式(7)中的gcp可知,不平衡分量會引起各個電流分量之間復雜的耦合關系。在基波子平面中,d軸電流與q軸電流內部存在2倍頻的交流耦合;對于5次諧波子平面,z1軸電流與z2軸電流間存在10倍頻的交流耦合。另外,由于不平衡分量的存在,基波子平面與5次諧波子平面中的電流分量之間也存在相互耦合,即電機中的5次諧波也會影響基波子平面中電流的控制。基波子平面與5次諧波子平面中主要存在4次諧波和5次諧波交流耦合。雙三相SP-PMLSM在dq坐標系下各個電流間的耦合關系見表3。
表3 雙三相SP-PMLSM各電流分量的耦合關系

Tab.3 The coupling relationships between the currents of dual-three phase SP-PMLSM
注:DC表示直流耦合,數字表示交流耦合頻次。
2.2 雙三相SP-PMLSM反電動勢擾動分析
由式(5)可知,電流方程中還存在SP-PMLSM的空載反電動勢dq。由于SP-PMLSM的分段供電形式,動子存在穿過分段的過程,導致永磁體于供電分段的耦合面積發生變化,使反電動勢不再為常量。為求得dq坐標系下的空載反電動勢,需先求出相應的永磁體磁鏈。對相空間永磁體磁鏈進行矢量解耦變換[30],得到dq坐標系下的永磁體磁鏈。由于磁鏈中基波分量占主要成分,因此可忽略永磁體磁鏈中的高次諧波,僅對基波分量進行變換。
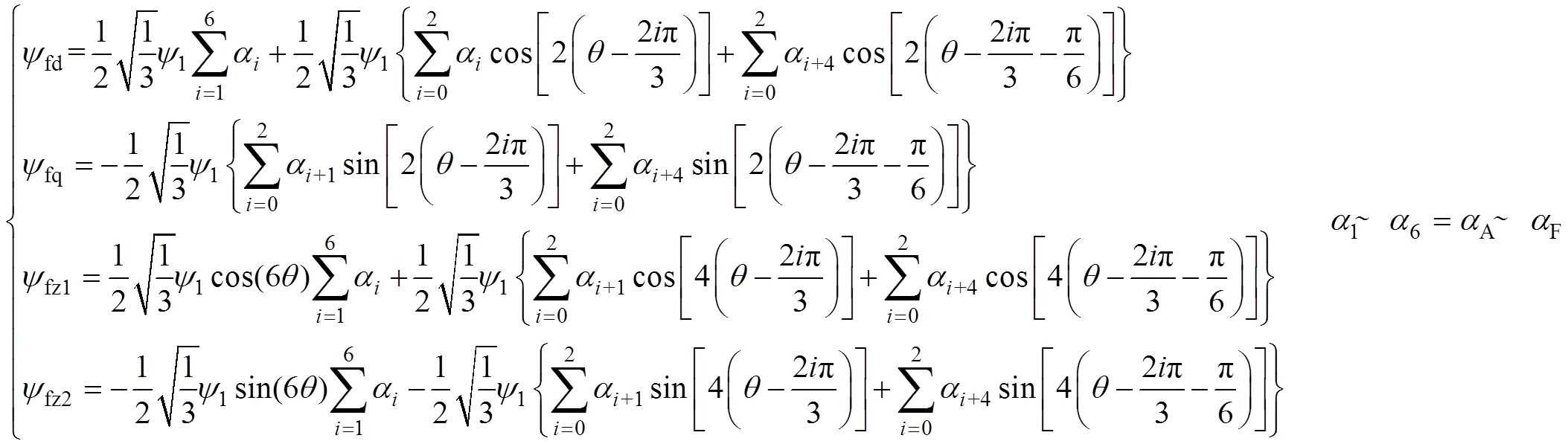
式中,y1為永磁體單元磁鏈中的基波幅值;a1~a6對應aA~aF,分別為永磁體與六相繞組間的非線性耦合因數,其隨動子位置的變化曲線如圖2所示。
依據式(8),當動子完全被供電分段覆蓋時,各相耦合因數A~F=6(動子極對數為6),dq坐標系下的永磁體磁鏈可化為

式中,d軸永磁體磁鏈為直流量,其余分量皆為0。
當動子在進入或穿出供電分段時,耦合因數A~F隨著動子位置的變化而變化,d軸永磁體磁鏈的直流分量在動子進入時增大,在動子穿出時減小。另外,在過分段過程中,還會在基波子平面引入2次諧波,而在5次諧波子平面中引入4次諧波。
將式(8)代入式(4-1)中計算得到dq坐標系下的空載反電動勢dq表達式為

可見在反電動勢的表達式中,d軸反電動勢中存在由耦合因數的導數引起的直流分量和2倍頻的波動量;q軸反電動勢中的直流分量是耦合因數的函數,z1軸與z2軸的反電動勢中由于耦合因數引入了4次諧波與6次諧波。動子穿過分段過程中的dq坐標下空載反電動勢波形如圖3所示。
由式(4-1)可知,電壓方程還存在由電感不平衡分量與電流導數形成的動態擾動,即gdqddq/d。由于電機中電流不能突變,因此該動態擾動有界。電機的穩態框圖形式如圖4所示。

圖3 動子穿過定子分段過程中在dq坐標系下的空載反電動勢

圖4 雙三相SP-PMLSM的電壓方程框圖
前向通道傳遞函數矩陣(+bdq)-1為對角矩陣,即

分析可知,若不存在過分段效應與電感不平衡,電壓方程中的擾動項與耦合項均在速度變化程度較小時近似為常量,采用PI調節器可對dq坐標系下的各分量電流獨立控制。電感不平衡和過分段反電動勢則引入了交流耦合項與擾動項,嚴重影響了電流控制的動態性能。
3 基于二階滑模擴張狀態觀測器的電流解耦控制


圖5 基于二階滑模擴張觀測器的電流解耦控制
3.1 電流解耦
依據分段供電雙三相SP-PMLSM的標稱參數設計電流環的反饋解耦部分。

式中,dq_dc為解耦環節輸出的補償電壓。
PI調節器的傳遞函數矩陣為

式中,p和i分別為PI調節器的比例常數和積分常數矩陣,p=diag(pd,pq,pz1,pz2),i=diag(id,iq,iz1,iz2);dq_PI為PI調節器輸出的電壓給定值;c為PI調節器的截止頻率。PI調節器按照零極點對消的原則進行設計,則選取pd=pq=d_n,pz1=pz2=z1_n,id=iq=iz1=iz2=n。d_n、z1_n、n分別為d軸電感、z1軸電感、相電阻的標稱值。
假設電流環中的擾動已被完全補償,將式(12)與式(13)代入式(4-1)獲得加入電流環的閉環傳遞函數()為
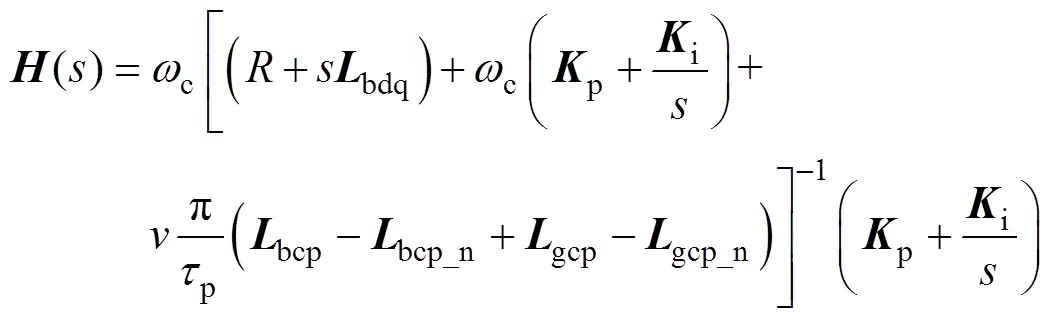
當標稱值與系統真值完全一致時,即bcp=bcp_n,gcp=gcp_n時,式(14)化為

式中,4×4為四階單位矩陣。可見,采用反饋解耦后,電流環的閉環傳遞函數轉化為截止頻率為c的一階慣性環節。因此電流可以無靜差地跟蹤階躍給定。
在實際情況中,系統的標稱值通常與實際值存在偏差,這會導致解耦性能變差。為評估電流環的解耦程度,引入DRGA后為


越接近0,表示系統的解耦程度越高。設n為系統參數失配度,定義為參數標稱值與真實值的比值,當n=1時,標稱參數與真值相等。在不同動子速度和n下,電流環的解耦度如圖6所示。可見當速度為0或n=1時,采用反饋解耦可以保證=0,即系統完全解耦。而隨著參數失配度的增大或動子速度的增加,系統的解耦程度顯著下降。因此,采用式(12)對系統解耦的同時,還需進一步削弱參數失配對電流控制帶來的影響。
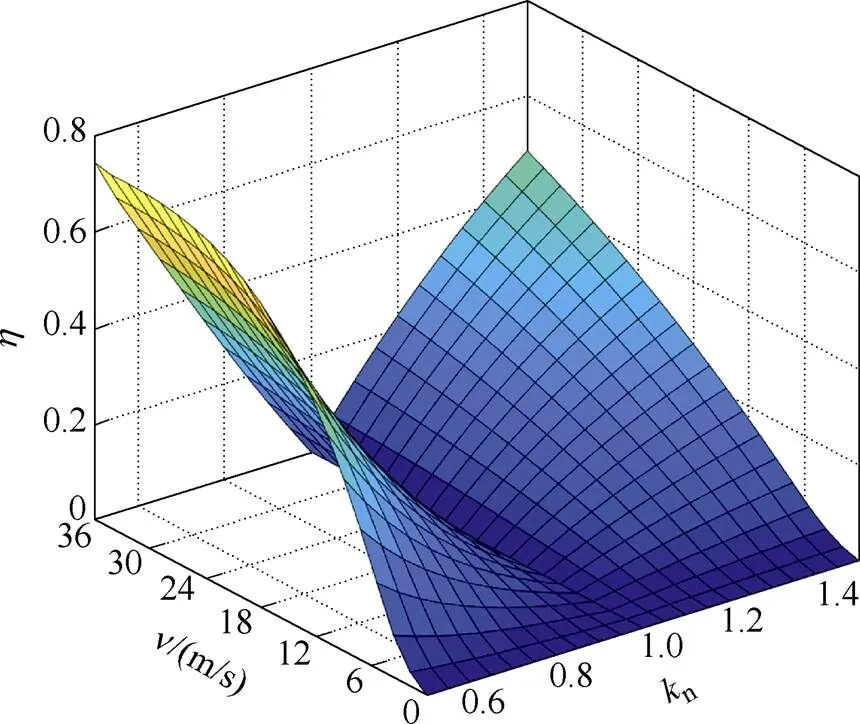
圖6 不同動子速度與參數準確度下的系統解耦程度
3.2 基于二階滑模擴張狀態觀測器的擾動補償
將參數失配與空載反電動勢等統一歸為一個未知擾動total,則式(4-1)可整理為

電機系統中,dtotal/d=有界,將total擴張為一個新的狀態變量,對式(18)構造觀測器為





式中,1與2為可調參數矩陣。設2+的取值范圍在區間[-,]內,則參數矩陣1與2需滿足條件式(23),以保證式(21)收斂到0[31]。

4 實驗驗證
基于RT-Lab實時實驗平臺[32]中的Virtex-7 FPGA板卡搭建了雙三相SP-PMLSM的數學模型,離散化精度為5×10-7s[29]。電機動子長度小于定子分段長度,為精確反映電機的電感不平衡與過分段反電動勢,建立了整個分段直線電機模型,由于該建模方法對FPGA資源占用較大,因此模型運行時采用4個分段循環的模式。采用基于PowerPC芯片的電機控制板卡實現電機的閉環控制,電機控制器的控制周期為6kHz,實驗平臺如圖7所示,雙三相SP-PMLSM的主要參數見表4。

圖7 雙三相SP-PMLSM控制測試實驗平臺
為驗證FBD-SOSM-ESO在應對電感不平衡與參數失配情況下的有效性,忽略動子反電動勢帶來的擾動(認為動子堵動)。以A相繞組的軸線為參考,建立以30Hz固定頻率旋轉的dq坐標系,給定q= 100A,d=z1=z2=0A。采用不同控制模式的電流響應如圖8所示。參數準確的情況下,在電流環中僅采用PI調節器時,由于d與q間的耦合較為嚴重,因而含有較大的2倍頻諧波。同時,由于諧波子平面之間和z1與z2軸間的耦合,導致z1與z2中亦含有較大的4、6次諧波。當引入反饋解耦FBD后,dq軸下各個電流分量的波動基本消除,驗證了FBD的有效性。當系統參數失配后,FBD無法完全消除電流環的耦合,因此各電流中重新出現了波動。在FBD的基礎上增加SOSM-ESO后,各電流中的波動被明顯抑制。
表4 雙三相SP-PMLSM主要參數

Tab.4 The main parameters of dual-three phase SP-PMLSM
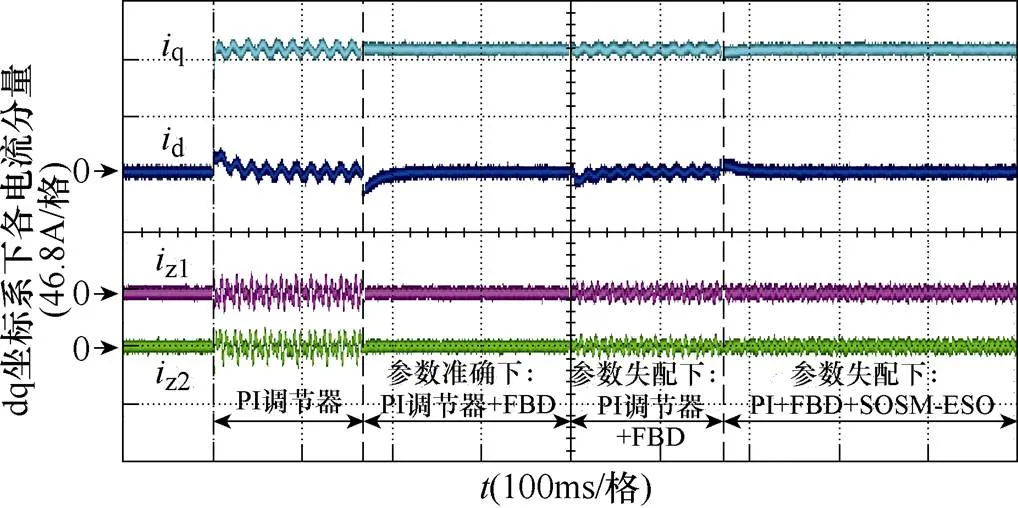
圖8 不同控制模式下的雙三相SP-PMLSM的dq坐標系的各電流分量
為驗證FBD-SOSM-ESO在速度閉環下的抗擾及解耦性能,速度外環采用PI調節器。動子的運行分為加速、勻速、制動三個階段。加速過程持續1.2s,速度達到10m/s;勻速過程持續0.6s;最后在1.2s內將動子制動到0m/s。
電流環僅采用PI調節器時的電機響應如圖9所示。電機一個分段中的dq軸電流如圖9b所示,當電機速度較低時,電流環中的耦合項及反電動勢擾動項均較小,電流較為平穩。當電機速度>5m/s時,由于反電動勢與耦合項增大,從而電機的dq軸電流明顯波動。尤其當動子過分段時,反電動勢對電流環帶來的擾動較大,q軸電流呈現以過分段為周期的波動。另外,由于耦合效應,q軸電流中還存在頻率較高的2倍頻波動。q軸電流的波動反應到各個分段的推力中(見圖9c),從而導致電機的總推力中含有與q軸電流頻率相同的波動,勻速區間中推力波動達到了15%,如圖9d所示。推力波動會影響動子速度的平穩性,如圖9a所示。可見在勻速運動區間中,速度波動達到1.5%。

圖9 電流控制采用傳統PI調節器時的電機特性
電流環中引入FBD-SOSM-ESO后,SP-PMLSM的響應如圖10所示。一個分段下的dq軸電流如圖10b所示,在0~10m/s速度區間中,dq軸電流保持平穩。在動子進入穿出分段時,FBD-SOSM-ESO有效補償了由反電動勢變化帶來的電流環擾動。SP- PMLSM各個分段的推力與總推力分別如圖10c和圖10d所示。推力在全速度范圍內均保持平穩,過分段時產生的推力波動由14%降低到了7.5%。電機動子的速度如圖10a所示,在加速、勻速與制動階段,實際速度較好地跟蹤了給定值,勻速區間速度波動由1.5%下降到了0.7%。

圖10 電流控制采用FBD-SOSM-ESO時的電機特性
實驗結果表明,FBD-SOSM-ESO可以對電感不平衡下電流環進行解耦,對d軸和q軸電流中的2倍頻以及z1軸和z2軸中的4、6倍頻耦合項起到了抑制作用;并顯著降低了動子過分段引起的反電動勢擾動與參數失配的影響,提升了電流控制性能,提高推力與速度的平穩性。
5 結論
本文針對雙三相SP-PMLSM由于電感不平衡引起的電流耦合與動子過分段導致的反電動勢擾動進行了分析,提出了一種FBD-SOSM-ESO控制策略對其進行抑制。結論如下:
1)電機的電感不平衡會導致基波子平面中存在2倍頻耦合項;在5次諧波子平面中則會引入4、6倍頻的耦合項。基于推導得到的電流耦合項,設計的反饋解耦器(FBD),有效抑制了d軸和q軸電流中2次諧波,以及5次諧波子平面的4、6次諧波。
2)電機過分段效應會在基波子平面中引入2倍頻反電動勢擾動,進而在5次諧波子平面中引入4和6倍頻反電動勢擾動。同時反電動勢擾動的直流分量也會隨著動子穿入和穿出分段而變化。提出的SOSM-ESO有效抑制了過分段引起的電流波動,將電機的推力波動由14%降低到了7.5%,提高了電機速度跟蹤性能。
[1] 蔣錢, 盧琴芬, 李焱鑫. 雙三相永磁直線同步電機的推力波動及抑制[J]. 電工技術學報, 2021, 36(5): 883-892.
Jiang Qian, Lu Qinfen, Li Yanxin. Thrust ripple and depression method of dual three-phase permanent magnet linear synchronous motors[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 883-892.
[2] 張曉虎, 趙吉文, 王立俊, 等. 基于自適應互聯擴展卡爾曼觀測器的永磁同步直線電機高精度抗干擾在線多參數辨識[J]. 中國電機工程學報, 2022, 42(12): 4571-4580.
Zhang Xiaohu, Zhao Jiwen, Wang Lijun, et al. High precision anti-interference online multiparameter estimation of PMSLM with adaptive interconnected extend Kalman observer[J]. Proceedings of the CSEE, 2022, 42(12): 4571-4580.
[3] 張康, 王麗梅. 基于反饋線性化的永磁直線同步電機自適應動態滑模控制[J]. 電工技術學報, 2021, 36(19): 4016-4024.
Zhang Kang, Wang Limei. Adaptive dynamic sliding mode control of permanent magnet linear synchronous motor based on feedback linearization[J]. Transa- ctions of China Electrotechnical Society, 2021, 36(19): 4016-4024.
[4] 李雄松, 崔鶴松, 胡純福, 等. 平板型永磁直線同步電機推力特性的優化設計[J]. 電工技術學報, 2021, 36(5): 916-923.
Li Xiongsong, Cui Hesong, Hu Chunfu, et al. Optimal design of thrust characteristics of flat-type permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 916-923.
[5] 王璨, 李國沖, 楊桂林, 等. 基于生物智能環狀耦合的嵌入式永磁同步直線電機高精度位置協同控制研究[J]. 電工技術學報, 2021, 36(5): 935-943.
Wang Can, Li Guochong, Yang Guilin, et al. Research on position cooperative control of high-precision embedded permanent magnet synchronous linear motor based on biological intelligence loop coupling[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 935-943.
[6] 宋文祥, 任航, 葉豪. 基于MRAS的雙三相永磁同步電機無位置傳感器控制研究[J]. 中國電機工程學報, 2022, 42(3): 1164-1173.
Song Wenxiang, Ren Hang, Ye Hao. Position sensorless control of dual three phase permanent magnet synchronous motor based on MRAS[J]. Proceedings of the CSEE, 2022, 42(3): 1164-1173.
[7] 張建亞, 王凱, 朱姝姝, 等. 雙三相永磁同步電機多諧波電流協同控制策略[J]. 中國電機工程學報, 2020, 40(2): 644-652.
Zhang Jianya, Wang Kai, Zhu Shushu, et al. Control strategies of dual three-phase permanent magnet machines with multi-harmonics[J]. Proceedings of the CSEE, 2020, 40(2): 644-652.
[8] 王琛琛, 王堃, 游小杰, 等. 低開關頻率下雙三相感應電機矢量控制策略[J]. 電工技術學報, 2018, 33(8): 1732-1741.
Wang Chenchen, Wang Kun, You Xiaojie, et al. Vector control strategy for dual three-phase induction machines under low switching frequency[J]. Transa- ctions of China Electrotechnical Society, 2018, 33(8): 1732-1741.
[9] 徐質閑, 王政, 王學慶, 等. T型三電平雙三相永磁同步電機驅動零共模電壓模型預測控制[J]. 中國電機工程學報, 2020, 40(13): 4301-4309.
Xu Zhixian, Wang Zheng, Wang Xueqing, et al. A predictive current control method for a T-type three- level dual three-phase PMSM with zero common- mode voltage[J]. Proceedings of the CSEE, 2020, 40(13): 4301-4309.
[10] 張志鋒, 吳雪松, 劉曉東. 低共模干擾的雙三相永磁同步電機SVPWM控制[J]. 電工技術學報, 2018, 33(增刊1): 58-66.
Zhang Zhifeng, Wu Xuesong, Liu Xiaodong. Low common mode interference SVPWM control for dual three phase permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2018, 33(S1): 58-66.
[11] 魯軍勇, 馬偉明, 孫兆龍, 等. 多段初級直線感應電機靜態縱向邊端效應研究[J]. 中國電機工程學報, 2009, 29(33): 95-101.
Lu Junyong, Ma Weiming, Sun Zhaolong, et al. Research on static longitudinal end effect of linear induction motor with multi-segment primary[J]. Proceedings of the CSEE, 2009, 29(33): 95-101.
[12] 聶世雄, 付立軍, 許金, 等. 分段供電直線感應電機動子不對稱模型及參數計算[J]. 電機與控制學報, 2017, 21(2): 10-17.
Nie Shixiong, Fu Lijun, Xu Jin, et al. Asymmetrical model and parameter calculation of segment-powered linear inductive motor mover[J]. Electric Machines and Control, 2017, 21(2): 10-17.
[13] 許金, 馬偉明, 魯軍勇, 等. 分段供電直線感應電機氣隙磁場分布和互感不對稱分析[J]. 中國電機工程學報, 2011, 31(15): 61-68.
Xu Jin, Ma Weiming, Lu Junyong, et al. Analysis of air-gap magnetic field distribution and mutual inductance asymmetry of sectionally powered linear induction motor[J]. Proceedings of the CSEE, 2011, 31(15): 61-68.
[14] 牟樹君, 柴建云, 孫旭東, 等. 分段供電交流直線電機三相互感不對稱分析及抑制[J]. 電工技術學報, 2015, 30(1): 81-88.
Mu Shujun, Chai Jianyun, Sun Xudong, et al. Analysis and restrain of mutual inductance asymmetry in the sectionally powered AC linear motor[J]. Transactions of China Electrotechnical Society, 2015, 30(1): 81-88.
[15] 許實章. 交流電機的繞組理論[M]. 北京: 機械工業出版社, 1985.
[16] Xu Wei, Zou Jianqiao, Mu Chaoxu. New model predictive current control strategy based rotor flux for linear induction machines[C]//2015 IEEE International Conference on Applied Superconductivity and Elec- tromagnetic Devices (ASEMD), Shanghai, China, 2015: 58-59.
[17] Zou Jianqiao, Xu Wei, Yu Xinghuo, et al. Multistep model predictive control with current and voltage constraints for linear induction machine based urban transportation[J]. IEEE Transactions on Vehicular Technology, 2017, 66(12): 10817-10829.
[18] Yang Rui, Wang Mingyi, Li Liyi, et al. Robust predictive current control with variable-gain adaptive disturbance observer for PMLSM[J]. IEEE Access, 6: 13158-13169.
[19] 尹忠剛, 白聰, 杜超, 等. 基于內模干擾觀測器的永磁同步直線電機無差拍電流預測控制方法[J]. 電工技術學報, 2018, 33(24): 5741-5750.
Yin Zhonggang, Bai Cong, Du Chao, et al. Deadbeat predictive current control for permanent magnet linear synchronous motor based on internal model dis- turbance observer[J]. Transactions of China Electro- technical Society, 2018, 33(24): 5741-5750.
[20] Wang Zhen, Zhao Jiwen, Wang Lijun, et al. Com- bined vector resonant and active disturbance rejection control for PMSLM current harmonic suppression[J]. IEEE Transactions on Industrial Informatics, 2020, 16(9): 5691-5702.
[21] 黎明, 趙吉文, 胡月鵬, 等. 基于降階雙環自抗擾的永磁同步直線電機電流諧波抑制[J]. 光學精密工程, 2020, 28(5): 1055-1065.
Li Ming, Zhao Jiwen, Hu Yuepeng, et al. Current harmonic suppression of permanent magnet syn- chronous linear motor based on reduced-order double closed-loop ADRC[J]. Optics and Precision Engin- eering, 2020, 28(5): 1055-1065.
[22] 李爭, 安金峰, 肖宇, 等. 基于自適應觀測器的永磁同步直線電機模型預測控制系統設計[J]. 電工技術學報, 2021, 36(6): 1190-1200.
Li Zheng, An Jinfeng, Xiao Yu, et al. Design of model predictive control system for permanent magnet synchronous linear motor based on adaptive observer[J]. Transactions of China Electrotechnical Society, 2021, 36(6): 1190-1200.
[23] 文通, 張思磊, 王中儀. 定子分段式永磁直線同步電機速度波動抑制方法研究[J]. 光學精密工程, 2020, 28(4): 933-945.
Wen Tong, Zhang Silei, Wang Zhongyi. Speed ripple suppression method of PMLSM with segmented stators[J]. Optics and Precision Engineering, 2020, 28(4): 933-945.
[24] 李立毅, 祝賀, 劉家曦, 等. 初級繞組分段永磁直線電機段間推力優化控制[J]. 電機與控制學報, 2014, 18(4): 79-87.
Li Liyi, Zhu He, Liu Jiaxi, et al. Optimal inter- segment thrust control applied in primary winding segmented PMLSM[J]. Electric Machines and Control, 2014, 18(4): 79-87.
[25] Lee K, Ha J I, Simili D. Analysis and suppression of slotting and cross-coupling effects on current control in PM synchronous motor drives[J]. IEEE Transa- ctions on Power Electronics, 2019, 34: 9942-9956.
[26] Wang Yingjie, Wang Wenchao, Wang Chao, et al. Coupling analysis on current control at low switching frequency for the three-phase PWM converter based on RGA and a novel output feedback decoupling method[J]. IEEE Transactions on Industrial Electro- nics, 2016, 63(11): 6684-6694.
[27] 張慶超, 馬瑞卿, 皇甫宜耿, 等. 電機轉速環節Super-Twisting算法二階滑模控制律設計與研究[J]. 西北工業大學學報, 2016, 34(4): 669-676.
Zhang Qingchao, Ma Ruiqing, Huangfu Yigeng, et al. Second-order sliding mode control based on super- twisting algorithm for the speed outer loop of motors[J]. Journal of Northwestern Polytechnical University, 2016, 34(4): 669-676.
[28] Davila J, Fridman L, Levant A. Second-order sliding- mode observer for mechanical systems[J]. IEEE Transactions on Automatic Control, 2005, 50(11): 1785-1789.
[29] 郭科宇, 李耀華, 史黎明, 等. 電樞分段供電永磁直線同步電機的非線性數學模型[J]. 電工技術學報, 2021, 36(6): 1126-1137.
Guo Keyu, Li Yaohua, Shi Liming, et al. Non-linear mathematic model of a segmented powered permanent magnet linear synchronous machine[J]. Transactions of China Electrotechnical Society, 2021, 36(6): 1126-1137.
[30] 楊金波. 雙三相永磁同步電機驅動技術研究[D]. 哈爾濱: 哈爾濱工業大學, 2011.
[31] Shtessel Y, Edwards C, Fridman L, et al. Sliding mode control and observation[M]. New York: Springer, 2015.
[32] Lee J S, Choi G. Modeling and hardware-in-the-loop system realization of electric machine drives—a review[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(3): 194-201.
Current Decoupling and Force Disturbance Suppression of Dual Three-Phase Permanent Magnet Linear Synchronous Motors with Section Power Supply
1,21,21,2
(1. Key Laboratory of Power Electronics and Electric Drive Institute of Electrical Engineering Chinese Academy of Sciences Beijing 100190 China 2. University of Chinese Academy of Sciences Beijing 100049 China)
Section power supply strategy is usually adopted to reduce the voltage and capacity of the inverters in the drive system of the permanent magnet linear synchronous machines (PMLSM) with long primary. However, the sectionally powered armature windings will generate the imbalanced inductance matrix. During the mover entering and leaving progress, the coupling and disturbance of the currents in the linear machine are caused, resulting in fluctuation of current and consequently thrust force ripple. To regulate the current precisely and diminish the thrust force ripple, a feedback decoupling controller is designed, and the effectiveness of the designed feedback decoupling controller is evaluated by using a dynamic relative gain array (DRGA). Furthermore, the disturbance caused by the dynamic process in back-EMF and the mismatches of machine parameters are estimated and compensated by an extended state observer based on the second-order sliding mode. The experimental results show that the proposed current control strategy can effectively reduce the fluctuation in current and diminish the force ripple.
Current control, disturbance, decoupling, section power supply, dual three-phase permanent magnet synchronous machine
10.19595/j.cnki.1000-6753.tces.211533
TM359.4
國家重點研發計劃高速磁浮交通系統關鍵技術研究課題資助項目(2016YFB1200602-20)。
2021-09-27
2021-11-26
郭科宇 男,1993年生,博士研究生,研究方向為永磁直線同步電機設計及控制。E-mail: guoky93@mail.iee.ac.cn
史黎明 男,1964年生,研究員,研究方向為直線電機設計及其控制、無線電能傳輸技術。E-mail: limings@mail.iee.ac.cn(通信作者)
(編輯 郭麗軍)
