基于AMESim的新型成孔機動臂動態(tài)性能研究
2023-01-10 01:43:58陳超王剛王力朱德泉楊雄
機械制造與自動化 2022年6期
關鍵詞:系統(tǒng)
陳超,王剛,王力,朱德泉,楊雄
(1.蘭州倚能電力(集團)有限公司,甘肅 蘭州 730070;2.西安卓力科技發(fā)展有限公司,陜西 西安 710038)
0 引言
新型成孔機是一種針對山地濕陷性黃土的成孔設備,基于某型挖掘機改裝而成。成孔作業(yè)時,需要其臂架裝置能夠長時間保持初始位置不變,然而因挖掘機主閥密封性能較差,動臂液壓缸、斗桿液壓缸和鏟斗液壓缸不能完全鎖死,不能滿足設計要求。因此需要對挖掘機液壓系統(tǒng)進行改造,在液壓缸油路加裝平衡閥或液壓鎖,使臂架能長時間保持初始位置。液壓系統(tǒng)加裝平衡閥或者液壓鎖后,會影響動臂[1]或斗桿的動態(tài)性能,因此需要對新型成孔機臂架裝置的動態(tài)性能展開研究。本文主要對動臂下降運動的動態(tài)性能進行研究。
針對臂架系統(tǒng)的動態(tài)性能,國內外不少學者進行了相關研究。陳晉市等[2]針對起重機起升系統(tǒng)模型仿真和實驗結果進行分析,結果表明,合理匹配平衡閥控制端阻尼并采用硬管過渡連接,改善起升系統(tǒng)的性能及避免抖動現(xiàn)象的發(fā)生。王子坡等[3]分析了起重機臂架抖動的原因,并通過模型仿真分析得出回油路節(jié)流閥、平衡閥控制油路阻尼孔等因素對變幅油缸運動的影響,對解決臂架變幅下降時的抖動現(xiàn)象具有指導意義。齊敦建[4]針對動臂和斗桿液壓再生回路進行介紹及故障診斷。張金陽[5]針對挖掘機在裝車作業(yè)時出現(xiàn)動臂下降卡頓現(xiàn)象,分析動臂下降油路原理并排除故障。王永進等[6]針對液壓挖掘機的動臂液壓控制系統(tǒng),提出動臂下降時采用比例再生閥,并驗證了挖掘機液壓控制方案的正確性。劉成強等[7]以正流量挖掘機動臂液壓系統(tǒng)為研究對象,建立了動臂液壓系統(tǒng)的仿真模型,并表明正流量控制挖掘機的動臂缸控制特性,很好地體現(xiàn)了駕駛意圖。劉釗等[8]針對裝載機動臂起降振動問題,提出液壓變流量緩沖控制方案,并采用電液比例閥流量控制方法,調節(jié)后期進油流量,降低動臂慣性沖擊。巫將等[9]針對雙平衡閥控雙缸變幅機構在負載下降時,因雙平衡閥結構參數(shù)的差異導致雙缸不同步現(xiàn)象,仿真與試驗證明了左右平衡閥控制阻尼孔的差異會導致變幅雙缸在負載下降過程中出現(xiàn)不同步,而導壓比、調壓彈簧預緊力的差異會導致雙缸開啟不同步,提出了雙缸無杠腔連通加防爆閥的解決方案。李曉鵬等[10]運用逆解分析了調角油缸的振動隨鉆桿振動的變化情況,分析表明變幅機構對鉆桿振動起到了分散振動能量的作用。
目前的研究都集中于傳統(tǒng)挖掘機或起重機臂架系統(tǒng)動態(tài)性能的提升,新型成孔機是基于挖掘機的一種新設備,其臂架系統(tǒng)動態(tài)性能的研究還是空白。本文將對比分析平衡閥和液壓鎖對新型成孔機動臂下降動態(tài)性能的影響。
1 動臂下降運動數(shù)學模型
新型成孔機主要包括手柄支架、洛陽鏟、防擺裝置、卷揚機、快速連接裝置、斗桿、動臂等,如圖1所示。

1—手柄支架;2—洛陽鏟;3—防擺裝置;4—卷揚機;5—快速連接裝置;6—斗桿;7—動臂。
首先調整動臂、斗桿到達最優(yōu)位置,調整防擺裝置等處于豎直位置。然后運用控制手柄控制主閥和電磁換向閥,使洛陽鏟自由下降鏟土,完成鏟土作業(yè)后利用卷揚機提起洛陽鏟,卷揚到位后防擺裝置頂住洛陽鏟,防止回轉過程中出現(xiàn)擺動現(xiàn)象,回轉到位后快速抖動卸土,卸土作業(yè)完成后,利用GPS定位系統(tǒng)回轉到預定工作位置。通過循環(huán)作業(yè),完成預定深度的成孔施工。臂架裝置在調整好位置后,在整個成孔作業(yè)過程中需要保持初始位置不變,因此需在原有液壓系統(tǒng)中加裝閉鎖元件。本文將對常用的閉鎖元件,即平衡閥和液壓鎖對臂架裝置下降動態(tài)性能的影響進行理論和仿真研究,確定最佳的閉鎖方案。
新型成孔機采用負載敏感液壓系統(tǒng),負載敏感系統(tǒng)中主閥的壓力差為定值。由流量計算公式,可得通過的流量為
(1)
式中:Cd為流量系數(shù);AT為主閥閥口過流面積,mm2;ΔP1為主閥閥口壓力差,MPa。
動臂液壓缸有桿腔流量公式為
Q2=Q1
(2)
式中Q2為有桿腔流量,L/min。
平衡閥芯的受力平衡方程為
(3)
式中:m1為平衡閥芯質量,kg;p為有桿腔壓力,MPa;Ac為平衡閥控制腔作用面積,mm2;k為彈簧剛度系數(shù),N/mm;x0為彈簧預壓縮量,mm;x1為平衡閥主閥芯位移,mm;c為黏性系數(shù)。
平衡閥流量、無桿腔流量方程為:
(4)
Q4=Q3
(5)
式中:A0為平衡閥開口面積,mm2;ρ為油液密度,kg/m3;ΔP2為平衡閥進出口壓力差,MPa;Q3為平衡閥流量,L/min;Q4為動臂液壓缸無桿腔流量,L/min。
根據(jù)液壓缸無桿腔流量,可推導出有桿腔理論流量Q′2,公式如下:
(6)
式中:A1為動臂液壓缸無桿腔面積,mm2;A2為動臂液壓缸有桿腔面積,mm2。
通過數(shù)據(jù)計算可以發(fā)現(xiàn),理論上動臂液壓缸有桿腔所需的流量Q′2大于實際上泵供給的流量Q2,因此需要再生單向閥向動臂有桿腔進行補油。這也是挖掘機采用的能量再生系統(tǒng),但會造成平衡閥的控制壓力過低,且容易造成動臂下降頓挫。
2 動臂液壓系統(tǒng)仿真模型
利用AMESim軟件建立仿真模型,如圖2所示,包括臂架裝置模塊1、斗桿液壓系統(tǒng)模塊2、鏟斗液壓系統(tǒng)模塊3、平衡閥模塊4、主閥模塊5、負載敏感泵模塊6。由于主要研究動臂下降時的動態(tài)性能,故對斗桿和鏟斗液壓系統(tǒng)模塊進行了簡化處理。

圖2 采用平衡閥方案的動臂液壓系統(tǒng)模型
將圖2中的平衡閥部分換成液壓鎖,液壓鎖面積梯度較大,是開關閥而非連續(xù)閥。平衡閥和液壓鎖都有負載保持功能,控制壓力由先導油路提供。其他參數(shù)不變,建立的液壓系統(tǒng)模型如圖3所示。

圖3 采用液壓鎖方案的動臂液壓系統(tǒng)模型
液壓系統(tǒng)的主要參數(shù)如表1所示。

表1 液壓系統(tǒng)參數(shù)
3 動臂下降動態(tài)性能分析
設置仿真參數(shù),在standard option中選定hold inputs constant,進行運行;然后選中general中use old final values,進行仿真。仿真時間為15 s,從2 s開始進行下降動作。分別分析平衡閥和液壓鎖對動臂下降過程動態(tài)性能的影響。
3.1 平衡閥方案
圖4-圖7分別為平衡閥閥芯位移量曲線、動臂液壓缸活塞位移曲線、動臂液壓缸壓力曲線和動臂液壓缸流量曲線。0 s~2 s設置主閥控制壓力為0。2 s~15 s動臂液壓缸有桿腔壓力控制平衡閥閥芯位移大小,有桿腔壓力較大時,平衡閥位移較大;有桿腔壓力較小時,平衡閥位移較小。由仿真曲線可知,動臂液壓缸有桿腔壓力變化頻率很快,導致平衡閥芯位移高速變化。平衡閥的流量與動臂液壓缸無桿腔的流量相等,平衡閥閥芯位移的大小影響著平衡閥的流量,從而影響動臂液壓缸無桿腔的流量和壓力。通過力平衡計算無桿腔壓力會影響有桿腔的壓力,進而影響平衡閥閥芯開度。經(jīng)分析可知,動臂下降速度與平衡閥閥芯開度相互耦合影響,從而使液壓缸活塞位移變化幅度較大,導致動臂下降頓挫,嚴重影響新型成孔機臂架動態(tài)性能,理論分析結果與仿真結果一致。
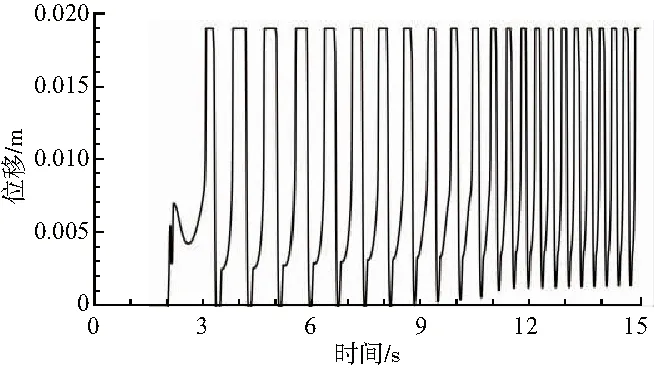
圖4 平衡閥閥芯位移

圖5 平衡閥方案動臂液壓缸活塞位移
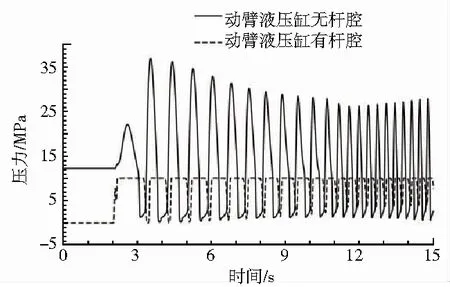
圖6 平衡閥方案動臂液壓缸壓力

圖7 平衡閥方案動臂液壓缸流量
3.2 液壓鎖方案
仿真參數(shù)設置同上,圖8-圖11分別為液控單向閥流量曲線、動臂液壓缸活塞位移曲線、動臂液壓缸壓力曲線和動臂液壓缸流量曲線。0 s~2 s設置主閥控制壓力為0。2 s~8 s動臂剛開始做下降動作時,因存在慣性,流量、壓力存在瞬時突變,然后平穩(wěn)。動臂下降過程中,動臂液壓缸流量、壓力波動幅度比較平穩(wěn),動臂液壓缸活塞平穩(wěn)移動,從而動臂能平穩(wěn)下降。8 s~15 s內,動臂下降到最低點,開始溢流,動臂液壓缸活塞位移較為平穩(wěn)。

圖8 液控單向閥流量
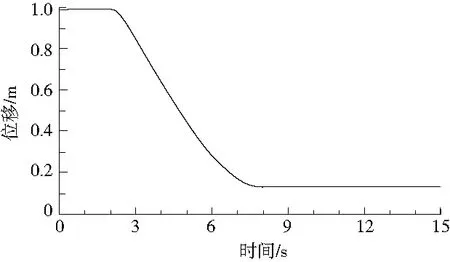
圖9 液壓鎖方案動臂液壓缸活塞位移
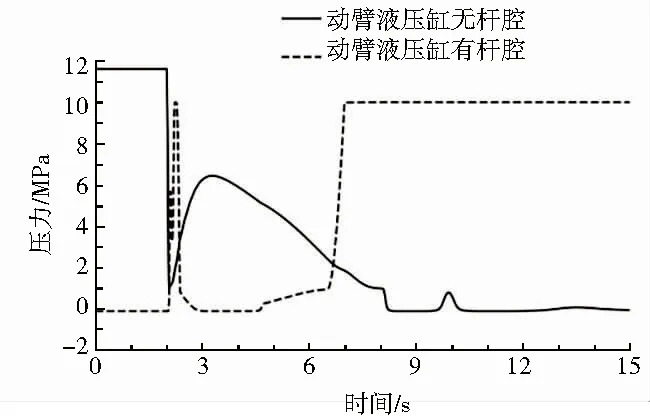
圖10 液壓鎖方案動臂液壓缸壓力

圖11 液壓鎖方案動臂液壓缸流量
3.3 對比分析
圖12、圖13為動臂液壓缸速度對比曲線、動臂液壓缸活塞位移對比曲線。從圖12和圖13可知,采用液壓鎖方案的動臂在下降過程中速度較為平穩(wěn),液壓缸活塞位移平穩(wěn)變小,而采用平衡閥方案的動臂在下降過程中速度波動非常劇烈,液壓缸活塞位移存在波動,動臂下降過程會出現(xiàn)頓挫現(xiàn)象。此外,采用液壓鎖方案的動臂在6 s左右就能完成下降,而采用平衡閥方案的動臂總體下降速度較慢,需要很長的時間才能完成下降。通過對比分析可以發(fā)現(xiàn),液壓鎖方案要明顯優(yōu)于平衡閥方案。
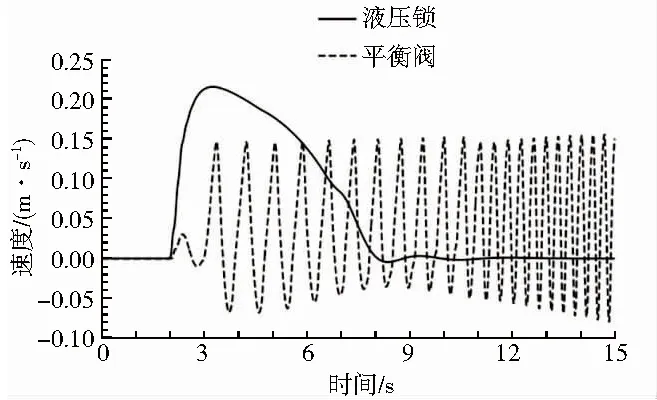
圖12 動臂液壓缸速度對比

圖13 動臂液壓缸活塞位移對比
4 結語
對某型挖掘機改裝的新型成孔機的動態(tài)性能進行研究。建立了新型成孔機動臂下降運動的數(shù)學模型。建立了采用平衡閥、液壓鎖兩種方案的動臂液壓系統(tǒng)仿真模型,并分析平衡閥和液壓鎖對新型成孔機動臂下降動態(tài)性能的影響。仿真結果表明:采用液壓鎖方案的動臂下降過程平穩(wěn),且下降速度快;采用平衡閥方案的動臂下降過程中會出現(xiàn)頓挫現(xiàn)象,下降速度較慢。平衡閥方案出現(xiàn)頓挫現(xiàn)象主要是因為有桿腔壓力波動影響平衡閥閥芯開度變化,導致動臂液壓缸活塞位移波動,從而影響動臂下降的穩(wěn)定性,造成頓挫現(xiàn)象。研究結果表明,采用液壓鎖方案的動臂動態(tài)性能明顯優(yōu)于平衡閥方案。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
