無人機傾斜攝影測量技術在橋梁檢測中的應用
2023-01-15 05:20:08裴俊華謝愛萍羅廣元劉維珩
工程建設與設計 2022年23期
裴俊華,謝愛萍,2,羅廣元,劉維珩
(1.甘肅林業職業技術學院,甘肅 天水 741020;2.甘肅農業大學園林工程學院,蘭州 730070;3.甘肅建投土木工程建設集團有限責任公司,蘭州 730070)
1 引言
在傳統的橋隧檢測過程中,檢測人員一般要深入橋隧實地進行勘察,通常配有橋檢車和望遠鏡對橋隧病害程度進行檢測,但這種檢測方法工作效率低,時效性差,檢測人員的安全性難以保證,檢測時會造成交通堵塞和運營秩序混亂,難以適應橋隧檢測需求。隨著無人機攝影測量技術的日趨成熟,通過近景攝影獲得被檢測橋梁高分辨率的圖像,對影像進行特征分析,得出橋梁病害結論的方法能有效提高橋隧檢測的工作效率[1]。本文應用多視角傾斜攝影測量技術,獲得高精度橋梁結構表面數據,結合二次橋底補測數據,進行三維建模和精細修模,獲得高清晰度、無死角、可定位、可量測的高精度橋梁模型,在模型上完成對橋梁各項病害指標的量測,經試驗對比,其成果具有一定的可靠性。
2 材料與方法
2.1 試驗橋梁基本情況
試驗橋梁為渭河1號大橋,橋址位于天水市麥積區,是城區南北跨渭河主通道。橋面寬12 m+2×2 m,橋梁全長378.47 m,15~25 m后張法預應力混凝土簡支箱形梁橋,全橋共有75片箱梁,每片重55 t,荷載汽-20級,掛-100,流量6 824 m3/s,洪水頻率1/100。橋墩為單排3柱式直徑120 cm鉆孔灌注樁基礎。橋梁1985年9月建成通車,建設年代久,負荷量大,存在病害較多,是麥積區重點監測橋梁。
2.2 試驗基本設備
試驗采用無人機可上下搭載輕型多鏡頭傾斜攝影平臺,平臺搭載有垂直、前視、左視、右視、后視共5個相機,可同步獲取5個方向的航空影像,相機總像素:18 000萬像素;最短曝光間隔:2 s;平臺工作時間:180 min;平臺總重:25 kg;姿態調整:<0.5°;兩自由度陀螺穩定;減震方式:兩級減震;鏡頭焦距:35/50 mm;影像分辨率:約2 cm(50 m時)。二次橋梁底面補測采用DJI精靈4RTK,內業軟件用Context Capture(以下簡稱“CC”)進行空三處理和三維重建,最后用DP-Modeler軟件(以下簡稱“DP-M”)進行單體化精確修模。
2.3 試驗方法
2.3.1 技術路線
為保障飛行安全,收集測區環境條件數據,控制點和地形地貌等測量資料,先按照傾斜攝影的方法進行第一次拍攝,內業解算形成粗模,在此基礎上,二次進行航線設計和多視角拍攝設計,再次解算,通過修模形成高精度模型,然后在模型上進行巡檢,量測橋梁各構件的病害定量指標。技術路線如圖1所示。
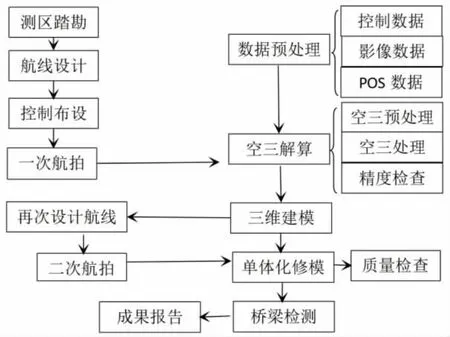
圖1 技術路線圖
2.3.2 外業方法
第一次航拍按照普通傾斜攝影測量進行,通常在橋面上布設不少于10個像控點,像控點標志明確醒目,這些點同時可作為圖根點和檢查點,利用GPS-RTK圖根點測量方法完成,控制點精度在2 cm以內。根據測區踏勘的情況,選擇地面分辨率優于1 cm計算,航高為50 m,航向重疊度為80%,旁向重疊度為80%,預計飛行時間為10 min。第二次采用DJI精靈4RTK航拍,將鏡頭調整為最大仰角,在初次建模的基礎上,按設計航線對橋梁底部進行傾斜攝影測量,為保障飛行安全和無死角拍攝,一般配合手動操控,并往返飛行[2],用激光全站儀對橋底的標志性特征點進行測量,作為橋底的像控點,用于建模和修模。
2.3.3 內業數據處理
根據GPS后處理軟件進行差分解算,得到5個相機的精確曝光定位及天線相位中心POS信息。然后進行傾斜數據預處理,獲取影像準確POS信息及相機信息。應用CC軟件解算,導入影像和POS,選特征提取與匹配、控制點進行空三計算,檢查精度,導出CC的XML文件,生成三維模型。通過DP-M軟件進行精確修模[3],將CC建成的三維模型格式轉換為OSG,設置基準面,構建單體化模型,對存在問題的部分進行編輯,紋理映射[4],完成高清晰度全視角橋梁模型。三維重建需要高性能計算機,完成后,須檢查三維模型效果及精度。
2.3.4 橋梁病害指標量測
根據JTG/T H21—2011《公路橋梁技術狀況評定標準》,對橋梁病害評定主要包括橋面系、上部結構、橋梁構件、部件、下部結構和全橋評定[5]。本文主要試驗研究橋梁上部結構、橋梁構件和部件表面病害指標的量測精度,以驗證方法的可行性。應用橋隧檢測系統軟件,將模型導入軟件,進行裸眼巡視,發現病害處,手動添加裂縫、滲水、脫落等病害類型,測量病害的面積、長度和寬度等指標信息,如圖2所示。最后統計匯總,形成報告。

圖2 病害數據采集與查詢界面
3 結果與分析
3.1 誤差分析
3.1.1 外業飛行引起的誤差及處理
傾斜攝影測量無人機受設備精度、地理條件、方案設計等因素影響,造成航片分辨率低,POS數據質量差,影響后續影像空三精度,進而影響建模精度和成圖精度。為了克服以上問題,采用RTK/PPK融合作業模式和逐相機打標的方式,保障照片、基站數據、機載POS和機載GPS數據實現高質量采集。
3.1.2 空三加密引起的誤差及處理
傾斜攝影測量后期數據處理時,影像分辨率和攝影比例差異、POS數據質量、遮擋物等因素導致粗差大,影響空三精度。為了提高精度,在外業建立像控點,將控制數據和RTK/PPK聯合空三計算,通過人工干預將空三成果精度優化到最佳。最后,兩次飛行數據模型應用DP-M軟件進行精確修模,形成高精度橋梁模型。
3.1.3 模型量測產生的誤差及處理
用檢測軟件量測也會產生誤差,模型影像1個像素的誤差,實地距離約1~3 mm,即使軟件能夠自動按照不同的面控制畫線,但視差造成矢量的不準確仍然存在,需要提高操作人員采集的熟練程度,提高矢量采集成果精度。
3.2 精度分析
3.2.1 空三精度分析
檢查傾斜攝影測量的空三精度[6],對比控制點和特征點,見表1。精度滿足要求。

表1 空三加密精度統計表
3.2.2 病害量測精度分析
在橋隧檢測軟件中調入橋梁模型,通過縮放、拖動等工具,手動搜尋病害位置,按照病害類型在模型上調查量測,獲取調查數據,對橋梁病害進行統計分析。對實地調查數據和模型調查數據比較,誤差統計滿足調查要求,見表2,無人機多視角傾斜攝影測量技術具有明顯優勢。
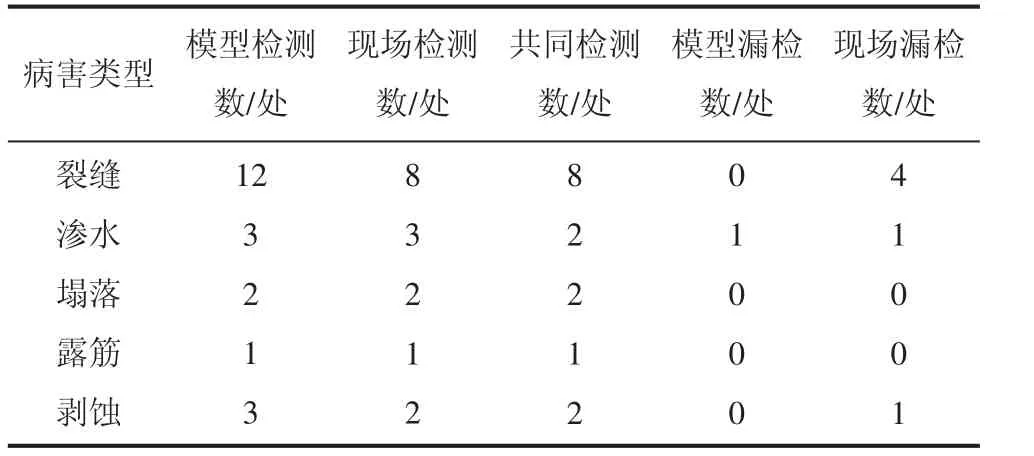
表2 實地檢測數和軟件模型檢測數統計表
裂縫對橋梁的危害十分嚴重,當裂縫寬度大于0.2 mm時就存在安全隱患,需采取維護措施,橋梁裂縫測量的精度要小于0.1 mm[7]。對模型裂縫寬長度量測與實地檢測數據比較,長度誤差范圍在-0.02~0.02 m,寬度誤差范圍在-0.01~0.15 mm,見表3。模型裂縫寬度數據存在偏大的趨勢。
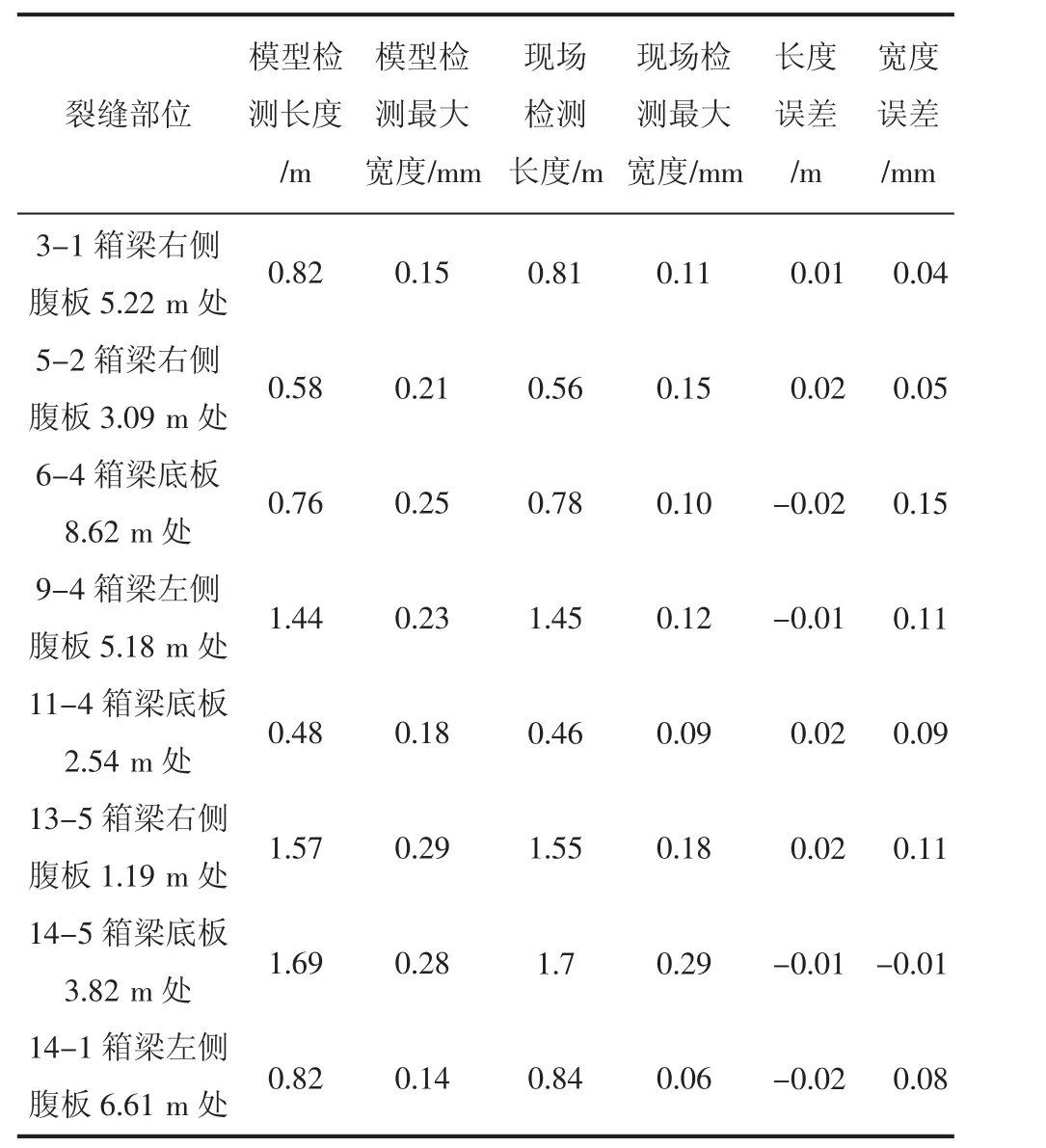
表3 實地檢測和軟件模型檢測裂縫長度寬度對比表
通過實地檢測和軟件模型檢測量算面積對比,見表4。面積誤差范圍在-0.03~0.03 m2,滿足病害檢測精度要求。

表4 實地檢測數和軟件模型檢測面積量測對比表
4 討論
無人機傾斜攝影測量技術可完成復雜建筑物三維建模工作,但二次拍攝橋梁底面衛星信號弱,無人機攝影有難度,規劃高度和航線需要在第一次模型基礎上精準完成。航測時外業飛行采用RTK/PPK融合作業模式和逐相片打標方式,提高定位精度。內業通過空三解算、建模、修模完善建模質量,當橋梁底面構造復雜時,還需要處理冗余影像,補拍照片貼圖,完善模型[8],這就加大了建模難度,使得建模工作量變大。模型的質量決定著橋梁病害檢測成果的準確程度,所以建模修模是核心工作。當模型精度能夠達到橋梁檢測技術的要求時,存在的個別誤差較大病害點,是人為確定區域主觀畫線而導致面積不準確。
混凝土梁式橋在道路橋梁類型中占比較大,其病害檢測是一項復雜的工作,無人機多視角傾斜攝影測量技術只是對橋梁表面病害進行檢測,存在局限性,如裂縫的深度,混凝土強度等無法檢測[9]。對于全橋的安全風險評估,需要考慮更多的要素。建議用無人機多視角傾斜攝影測量技術進行初步評價,以確定進一步檢測的必要性和重點檢測的病害。其模型數據可作為橋梁周期性監測的對比數據。
5 結論
通過無人機多視角傾斜攝影測量技術對天水市麥積區渭河大橋病害進行檢測,共發現裂縫12處,滲水3處,塌落2處,露筋1處,剝蝕3處。模型量測寬度、長度、面積等數據和實地量測數據差異不大,在誤差許可范圍內,滿足病害檢測要求。應用無人機多視角傾斜攝影測量技術完成一項橋梁檢測工程,測量外業工作強度小,需要的人力少,儀器輕便,人員安全,能夠有效縮短項目周期。隨著人工智能圖形識別技術能力和精度的大幅提升,該方法能快速提升工作效率,有效保障作業人員安全,具有一定的推廣意義。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
湖南教育·A版(2019年4期)2019-05-10 03:31:44
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
山東工業技術(2016年15期)2016-12-01 05:31:04
海峽科技與產業(2016年3期)2016-05-17 04:32:12
