基于傳感器的感知系統在德國鐵路網首次測試和應用
2023-01-16 11:27:16
現代城市軌道交通 2023年1期
1 引言
為提高德國鐵路系統的運輸能力、準時性和效率,德國鐵路股份公司(DB)制定并推行“數字化鐵路”戰略,通過不斷引入數字化技術,如歐洲列車控制系統(ETCS)、數字化集中裝置等,提高鐵路基礎設施的現代化水平。
此外,DB 還致力于完成鐵路系統更深遠的數字化。未來,列車將實現行車間隔最優化的全自動運行,由基于人工智能(AI)的運營及事故管理系統對列車進行智能和自動化控制,從而在不新建鐵路基礎設施的情況下顯著提高鐵路的運輸能力。為此,需要對列車運行環境(如障礙物、人等)進行實時感知,并對列車位置進行連續定位。
Sensors4Rail 項目作為DB 與合作伙伴聯合開展的、德國“數字化鐵路”戰略框架內的一個重要項目,旨在研發和測試集環境感知、實時定位、數字地圖等功能于一身的智能系統。項目于2019年夏季正式開始,其第一階段成果在2021年10月的漢堡國際智能交通系統(ITS)大會上由DB 與合作伙伴——西門子交通集團、HERE Technologies、Ibeo Automotive Systems GmbH、博世公司一起發布。本文將對相關成果進行簡要介紹。
2 項目背景
高度自動化及全自動化駕駛技術的應用是縮短列車行車間隔,減少能源消耗,提高鐵路運輸能力及可靠性、安全性的重要手段。漢堡數字化市區快速列車(S-Bahn)項目作為德國“數字化鐵路”戰略框架內的另一重要項目,將基于歐洲列車控制系統的列車自動駕駛(ATO over ETCS)技術引入德國常規鐵路運營中,是列車自動駕駛技術發展的一個里程碑。該項目在配備ETCS 的漢堡S-Bahn 21 號線(以下簡稱“S21 線”)23 km 長線路區段上以高度自動化運行模式(GOA2)運行4 列經過改裝的列車,完成列車自動起動、加速、制動、停車操作。列車運行期間,駕駛員僅負責對列車運行狀態進行監控,并在發生故障時進行干預。在漢堡ITS 大會展示期間,漢堡數字化S-Bahn 項目列車實現了全自動化運行,即在沒有駕駛員值守的情況下自動駛入停車線及伯格多夫站(Bergedorf)站臺。然而,由于列車上并未安裝基于傳感器的障礙物檢測系統,因此行車過程中,遠程駕駛員是在控制中心利用集中裝置對列車運行狀態進行監控,難以達到實時、精確感知和控制的目標。
為解決上述問題,對列車運行環境及狀態進行實時感知,從而為列車全自動化運行奠定良好基礎,成為當務之急。而在鐵路領域,相關技術的發展仍處于起步階段,未達到其在汽車領域應用的成熟度,需加大研發力度。Sensors4Rail 項目由此鋪開。其研發內容包括基于傳感器的環境感知系統、精確的實時定位系統以及高度準確的線路環境數字地圖。為此,研發人員將最先進的傳感器和功能強大的計算機系統集成到漢堡數字化S-Bahn 測試車輛中,并開發了相應的軟件組件。在這過程中,DB 負責進行項目管理,提供車輛、所需線路,實施車輛改造,以及開發信息安全相關工作包;西門子交通集團負責本地化工作包的開發,以及系統的測試、集成;博世公司與Ibeo Automotive Systems GmbH合作開發環境感知工作包;HERE Technologies 開發數字地圖工作包。上述系統可實時提供有關列車周圍環境的最準確信息及列車的精確位置,檢測軌道上及周邊的靜態、動態障礙物并對其危害進行評估。這對于開發智能駕駛輔助系統、實現列車全自動運行將發揮決定性作用。此外,列車運行的重要數據(如列車位置或軌道上障礙物相關數據)被以高頻率采集,并通過云界面提供和查詢,用于更快地發現和處理故障,優化列車調度,從而使鐵路運輸更流暢和可靠。
3 系統概述
Sensors4Rail 項目相關系統(以下簡稱“Sensors4Rail系統”)搭載在經過改裝的BR472 型車輛上,由DB 下屬子公司DB Systemtechnik 負責行車測試。
圖1展示了測試車輛上安裝的Sensors4Rail 系統,包括硬件和軟件。此外,DB 內部云環境(即DB 模塊化云)也是Sensors4Rail 系統的一部分。系統可接收并處理全球導航衛星系統(GNSS)信號;列車與云之間的通信通過沃達豐(Vodafone)公司提供的、具有優先級的長期演進(LTE)/4G 連接實現。Sensors4Rail 項目的測試線路為漢堡S21 線從柏林托爾(Berliner Tor)至奧姆勒(Aumühle)的23 km 區間。測試的關鍵線路區間為Bergedorf—Berliner Tor 路段,其為漢堡ITS 大會的示范線路。
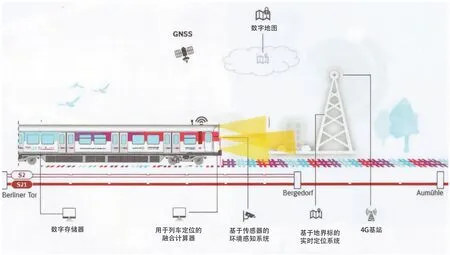
圖1 Sensors4Rail 系統構成示意圖
4 車輛系統集成
Sensors4Rail 項目測試車輛長度為60 m,共鋪設約4.3 km 長的電纜,安裝了45 個特殊硬件組件及約3 500 個零件。該項目面臨的一個特殊挑戰是新硬件組件在車輛中的集成,包括攝像機、雷達、激光雷達(LiDAR)等傳感器,具有多個圖形處理單元(GPU)的高性能服務器,數據存儲器以及在組件之間進行數據傳輸所用的10 Gbps 網絡。
其中大部分組件是首次用于鐵路運營,因此不容易獲得所需批準和許可。例如,用于環境感知的傳感器最初是為汽車行業開發的,必須經過試驗室驗證才能應用到鐵路領域。因此,Sensors4Rail 的一個重要目標是:在典型的鐵路環境下(溫度跨度大、振動強烈、污染嚴重)對上述硬件組件進行測試。
圖2展示了經過改裝、安裝了環境感知傳感器的BR472 型列車正面。6 臺激光雷達以3 臺為一組,安裝在前擋風玻璃上方的左右兩邊,能夠以15 Hz 的頻率進行密集掃描,其測量范圍覆蓋所需的水平和垂直視野,并可實時生成列車運行環境的3D 點云。上方車燈的一側安裝1 臺紅外攝像機,可通過檢測波長為8~14 μm的長波紅外線來識別物體。與在近紅外光范圍內工作的激光雷達一樣,紅外攝像機無需環境照明,能夠在絕對黑暗的環境中(如隧道中或夜間)感知靜態和動態物體。前擋風玻璃下方安裝3 臺在可見光波長范圍內工作的攝像機,包括1 臺除采集圖像數據外還可確定近距離環境深度值的立體相機,以及2 臺視距分別為300 m(中距離)和550 m(遠距離)的攝像機。車輛前部的環境感知由4 臺工作頻率為76~77 GHz 的雷達完成。所有原始傳感器數據都收集在高性能服務器中,并在此得到進一步的實時處理和記錄以供日后分析。
安裝在BR472 型列車上的定位系統由位移脈沖發生器、光學軌頭傳感器、慣性測量單元和計算機系統組成。該系統可將信號源數據與由雷達實時定位及地圖創建(SCAM)系統的環境感知功能所共同確定的列車位置信息、基于地界標的定位信息相結合,計算出列車前部位置,并將以這種方式確定的列車位置與高精度定位系統所得結果進行比較,分析偏差,實現在不安裝新基礎設施組件情況下的高精度列車實時定位。
高精度數字地圖(HD 地圖)最初也是為汽車行業的自動化駕駛而開發,用于支持駕駛員輔助系統的運行及車輛的本地化。與傳統導航地圖相比,HD 地圖能夠以更高的細節水平表達現實場景,其包含沿線物體信息,如建筑物、橋梁或站臺邊緣,是鐵路及其周圍環境的數字孿生體,可用作連續比較實際狀態與目標狀態的參考。研發人員利用徠卡Pegasus 2 測量系統采集的數據創建HD 地圖,并確定4 個GNSS 主站和多個控制點,其絕對坐標精度約為3~5 cm。因此,HD 地圖可以作為基于地界標的列車前部位置定位的基礎。
Sensors4Rail 項目在車輛中集成環境感知、定位和數字地圖這3 個子系統,并測試其以下6 個功能(圖 3):
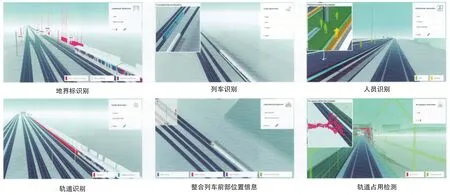
圖3 Sensors4Rail 項目測試的系統功能
(1)識別地界標并與數字地圖進行比較,以準確定位列車前部位置;
(2)檢測和分類相鄰軌道上的列車,以免將其識別為危險物或障礙物;
(3)檢測、分類和定位站臺上的人員,以便在緊急情況下做出反應;
(4)檢測車輛所在軌道和相鄰軌道走向,并與數字地圖進行比較,以便以軌道線路為參照定位對象;
(5)將所有定位和路徑信息整合到軌道的一個位置上,以便在不新建基礎設施的情況下實現高精度的列車實時定位;
(6)通過監控車輛所在軌道和相鄰軌道建筑接近限界內外的空間容積來檢測軌道占用情況,以便對未知障礙物做出反應。
5 項目成果展示
Sensors4Rail 項目的成果在漢堡ITS 大會上展示。
為此,研發人員基于現代化的圖形環境創建了一個虛擬的現實圖像,用以展示Sensors4Rail 系統的實時數據,這些數據來源于對線路的初始高精度測量。被識別的地界標及列車位置相關數據通過接口轉發給計算機,計算機會對這些數據進行實時的可視化處理,并顯示到列車上安裝的監視器中(圖4)。由圖4可知,除列車實時運行環境之外,界面還可以清晰地展示系統采集的眾多信息,如地界標總數、列車當前速度等,未來這些數據可以傳輸到控制中心,用于優化列車調度或對故障做出快速反應。

圖4 Sensors4Rail 項目成果可視化展示界面
此外,相關數據還通過4G 接口發送到云端并提供給另一個服務實例,該實例在ITS 大會BR472 型列車展示運行期間生成了與Linkedln 和YouTube 等社交網絡中實時流相同的可視化效果,使更多的國際受眾能夠遠程查看項目成果。
6 展望
目前,DB 及其合作伙伴正在籌備Sensors4Rail 項目第二階段的試運行,該階段于2022年5月開始,計劃將測試區域擴展到漢堡S-Bahn 線網中的其他路線,并在各種天氣條件下及各時間段(白天和黑夜)記錄原始數據,以提高數據的多樣性。利用這些來自傳感器的原始數據還可對所使用的神經網絡進行重復訓練,以促進系統的進一步優化完善。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
云南畫報(2021年12期)2021-03-08 00:50:54
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
鐵道通信信號(2018年7期)2018-08-29 01:17:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
