并網(wǎng)逆變器三矢量模型預(yù)測(cè)直接功率控制
2023-01-16 09:03:20何潛何攻陳力帥紅孫越
關(guān)鍵詞:控制策略
何潛, 何攻, 陳力, 帥紅, 孫越
1. 國(guó)網(wǎng)重慶市電力公司,重慶 400015; 2. 重慶大學(xué) 電氣工程學(xué)院,重慶 400044
分布式能源以分散型、 小規(guī)模的方式在用戶旁就近布置,能夠獨(dú)立輸送能源,與大電網(wǎng)等集中型能源供應(yīng)方式相比,其能源利用率高,對(duì)環(huán)境友好,故越來(lái)越受到人們關(guān)注[1-4].而困擾分布式能源發(fā)展的重要因素為并網(wǎng)問(wèn)題,為將其更高效地應(yīng)用,并網(wǎng)逆變器作為將能源輸入電網(wǎng)的核心裝備受到學(xué)者們重視,并網(wǎng)逆變器控制性能直接關(guān)系并網(wǎng)電能質(zhì)量,多年來(lái)對(duì)其控制策略的改進(jìn)一直是研究熱點(diǎn).模型預(yù)測(cè)直接功率控制(Model Predictive Direct Power Control,MPDPC)邏輯簡(jiǎn)單,動(dòng)態(tài)響應(yīng)快,價(jià)值函數(shù)設(shè)計(jì)靈活,能夠較好地處理系統(tǒng)非線性約束.MPDPC與傳統(tǒng)直接功率控制相比,不僅無(wú)需繁瑣的PI參數(shù)設(shè)計(jì),而且通過(guò)功率預(yù)測(cè)模型選擇最優(yōu)開(kāi)關(guān)矢量,解決了傳統(tǒng)直接功率控制由啟發(fā)式開(kāi)關(guān)表選取矢量的不精確性問(wèn)題[5-6].
目前單矢量模型預(yù)測(cè)控制應(yīng)用較為廣泛,雖然該控制策略有諸多優(yōu)點(diǎn),但其輸出電壓矢量直接在7種基本電壓矢量中選取,方向與幅值均不可調(diào),且在單個(gè)控制周期內(nèi)僅作用一個(gè)電壓矢量,控制精度有待提高[7-8].對(duì)于以上問(wèn)題,可以采用在單個(gè)控制周期內(nèi)增加作用的電壓矢量數(shù)目來(lái)解決.雙矢量模型預(yù)測(cè)控制是在單矢量預(yù)測(cè)控制的基礎(chǔ)上增加了一個(gè)電壓矢量[9-11],占空比模型預(yù)測(cè)控制是雙矢量模型預(yù)測(cè)控制的一種,該控制策略將一個(gè)有效電壓矢量與零電壓矢量進(jìn)行組合作用在當(dāng)前控制周期,其中第二個(gè)電壓矢量固定為零電壓矢量,故在每個(gè)控制周期中只可選擇6個(gè)固定方向的電壓矢量[12-14].文獻(xiàn)[15-16]提出的雙矢量模型預(yù)測(cè)控制沒(méi)有特別規(guī)定某一電壓矢量為零電壓矢量,并在分配兩個(gè)電壓矢量的作用時(shí)間時(shí)遵循無(wú)差拍控制的方式,其輸出電壓矢量的覆蓋范圍在一定程度上得到了擴(kuò)大,但當(dāng)兩個(gè)電壓矢量均為有效電壓矢量時(shí),其輸出電壓矢量的幅值不可調(diào),使輸出電壓矢量覆蓋范圍仍受限.針對(duì)雙矢量模型預(yù)測(cè)控制的局限性,本文在其基礎(chǔ)上又增加了一個(gè)電壓矢量作用在每個(gè)控制周期,提出一種基于并網(wǎng)逆變器的三矢量模型預(yù)測(cè)直接功率控制,先通過(guò)價(jià)值函數(shù)從6個(gè)有效矢量中優(yōu)選出第一個(gè)電壓矢量,然后將其余5個(gè)有效矢量連同零矢量合成出5個(gè)期望電壓矢量,使輸出電壓矢量的方向與幅值均可調(diào),且通過(guò)功率無(wú)差拍原則分配電壓矢量作用時(shí)間,同時(shí)完成了對(duì)有功功率與無(wú)功功率的無(wú)差拍控制,提高了控制精度.最后,由仿真與實(shí)驗(yàn)結(jié)果證實(shí)了所提三矢量MPDPC的可行性和有效性.
1 并網(wǎng)逆變器離散數(shù)學(xué)模型
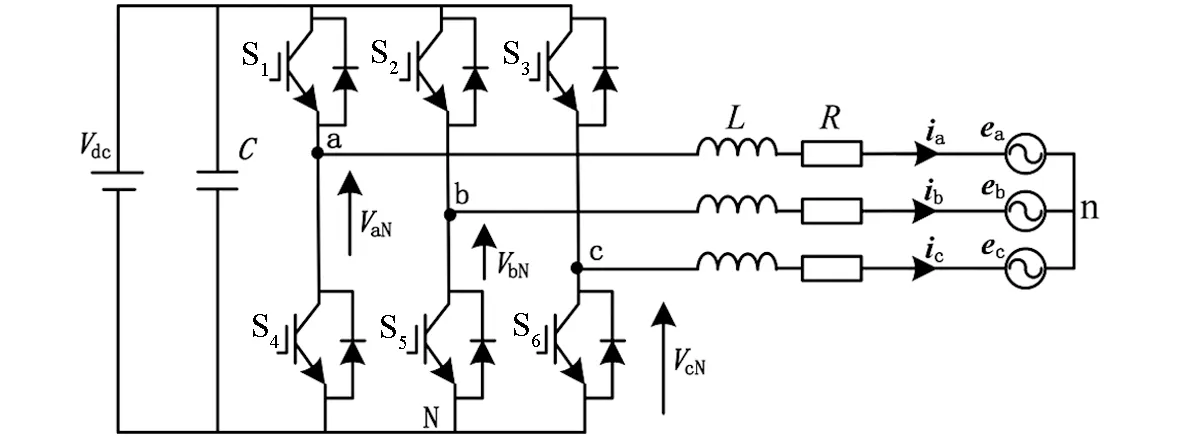
圖1 電壓源型PWM并網(wǎng)逆變器拓?fù)浣Y(jié)構(gòu)
電壓源型PWM并網(wǎng)逆變器的拓?fù)浣Y(jié)構(gòu)如圖1所示,其中,Vdc、C分別為直流側(cè)的電壓、 電容,S1至S6分別為并網(wǎng)逆變器內(nèi)部的6個(gè)開(kāi)關(guān)器件,L,R分別為濾波電感、 線路電阻,ia,ib和ic分別為逆變器網(wǎng)側(cè)三相電流,ea,eb和ec分別為逆變器網(wǎng)側(cè)三相電壓,n為網(wǎng)側(cè)中性點(diǎn),VaN,VbN和VcN分別為逆變器三相的輸出電壓.由于逆變器處在任何一種工作狀態(tài)下,其每項(xiàng)橋臂僅允許一個(gè)開(kāi)關(guān)器件導(dǎo)通,因此上下開(kāi)關(guān)器件的狀態(tài)應(yīng)該互補(bǔ),可設(shè)Si為單極性二值邏輯開(kāi)關(guān)函數(shù),上橋臂導(dǎo)通可表示為Si=1,下橋臂導(dǎo)通可表示為Si=0,i為a,b,c.
并網(wǎng)逆變器在兩相靜止(αβ)下的數(shù)學(xué)模型可表示為
(1)
式(1)中eα,eβ,iα,iβ分別為電網(wǎng)電壓與網(wǎng)側(cè)電流在αβ坐標(biāo)系下的分量;uα,uβ為逆變器輸出電壓在αβ坐標(biāo)系下的分量,可表示為
(2)
由式(1)可得:
(3)
由瞬時(shí)功率理論,可將有功功率p與無(wú)功功率q表示為
(4)
對(duì)式(4)兩邊同時(shí)求導(dǎo)可得:
(5)
將式(3)代入式(5)有:
(6)
根據(jù)歐拉法,由式(6)可得并網(wǎng)逆變器在兩相靜止坐標(biāo)系下的離散功率預(yù)測(cè)模型:
(7)
式(7)中k表示時(shí)間離散化后的當(dāng)前時(shí)刻,k+1表示下一時(shí)刻.
2 模型預(yù)測(cè)直接功率控制
2.1 單矢量模型預(yù)測(cè)直接功率控制
單矢量MPDPC輸出的最優(yōu)電壓矢量uopt直接從7種基本電壓矢量中選取,其電壓矢量選擇如圖2所示.
單矢量MPDPC的思路為根據(jù)瞬時(shí)功率理論,由在兩相靜止坐標(biāo)系下的當(dāng)前時(shí)刻電壓和電流計(jì)算出當(dāng)前時(shí)刻功率,通過(guò)功率預(yù)測(cè)模型預(yù)測(cè)下一時(shí)刻功率.其中價(jià)值函數(shù)根據(jù)功率給定值與功率預(yù)測(cè)值間的誤差最小來(lái)設(shè)計(jì),使價(jià)值函數(shù)g最小的電壓矢量即為最優(yōu)電壓矢量.
g=|p*-p(k+1)|+|q*-q(k+1)|
(8)
式(8)中p*,q*為有功功率與無(wú)功功率的給定值.
2.2 雙矢量模型預(yù)測(cè)直接功率控制
雙矢量MPDPC在單矢量MPDPC的基礎(chǔ)上,增加了一個(gè)電壓矢量作用在每個(gè)控制周期,其電壓矢量選擇如圖3所示,第一個(gè)電壓矢量用u1表示,其作用的時(shí)間為t1,第二個(gè)電壓矢量用u2表示,其作用的時(shí)間為t2.
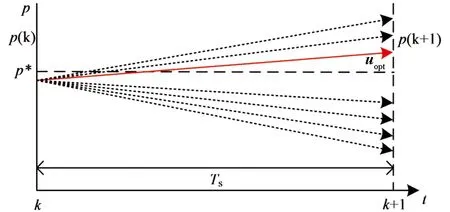
圖2 單矢量MPDPC矢量選擇
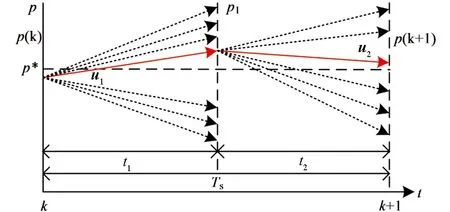
圖3 雙矢量MPDPC矢量選擇
根據(jù)無(wú)差拍控制原則,可將下一時(shí)刻的無(wú)功功率表示為
q(k+1)=q(k)+sq1t1+sq2(Ts-t1)=q*
(9)
式(9)中sq1為在第一個(gè)電壓矢量作用下的無(wú)功功率斜率;sq2為在第二個(gè)電壓矢量作用下的無(wú)功功率斜率.由式(6)可得:
(10)
(11)
(12)
式(10)-(12)中uz為零電壓矢量,sqz為在零電壓矢量作用下的無(wú)功功率斜率;uα1,uβ1,uα2,uβ2分別為第一個(gè)電壓矢量與第二個(gè)電壓矢量在αβ坐標(biāo)系下的分量.
由式(9)可得第一個(gè)電壓矢量與第二個(gè)電壓矢量各自的作用時(shí)間分別為
(13)
t2=Ts-t1
(14)
雙矢量模型預(yù)測(cè)直接功率控制的輸出電壓矢量在由第一個(gè)電壓矢量與第二個(gè)電壓矢量合成的期望電壓矢量中選取,此時(shí)式(7)中的uα,uβ可表示為
(15)
(16)
雙矢量模型預(yù)測(cè)直接功率控制先從7種基本電壓矢量中通過(guò)價(jià)值函數(shù)選取第一個(gè)最優(yōu)電壓矢量,然后將其余6種電壓矢量作為與第一個(gè)最優(yōu)電壓矢量合成期望電壓矢量的備選.最后將使g最小的期望電壓矢量輸出,其相應(yīng)所選的備選矢量即為第二個(gè)電壓矢量.
3 三矢量模型預(yù)測(cè)直接功率控制
3.1 基本原理

圖4 三矢量MPDPC矢量選擇
為使功率預(yù)測(cè)值進(jìn)一步逼近功率給定值,并同時(shí)對(duì)有功功率與無(wú)功功率完成無(wú)差拍控制,提高系統(tǒng)性能,本文在雙矢量模型預(yù)測(cè)直接功率控制的基礎(chǔ)上在每個(gè)控制周期內(nèi)再增加一個(gè)起作用的電壓矢量,提出一種三矢量模型預(yù)測(cè)直接功率控制策略,該策略通過(guò)兩個(gè)有效電壓矢量與一個(gè)零電壓矢量合成出期望電壓矢量作用在每個(gè)控制周期,其電壓矢量選擇見(jiàn)圖4.
該策略先在6種有效電壓矢量中通過(guò)價(jià)值函數(shù)優(yōu)選出第一個(gè)電壓矢量,再將剩下5種有效電壓矢量作為備選矢量與第一個(gè)電壓矢量連同零電壓矢量各自組合,合成出5種期望電壓矢量,將使g最小的期望電壓矢量輸出,其輸出電壓矢量方向與幅值均可調(diào).并網(wǎng)逆變器三矢量模型預(yù)測(cè)直接功率控制的系統(tǒng)控制框圖見(jiàn)圖5.
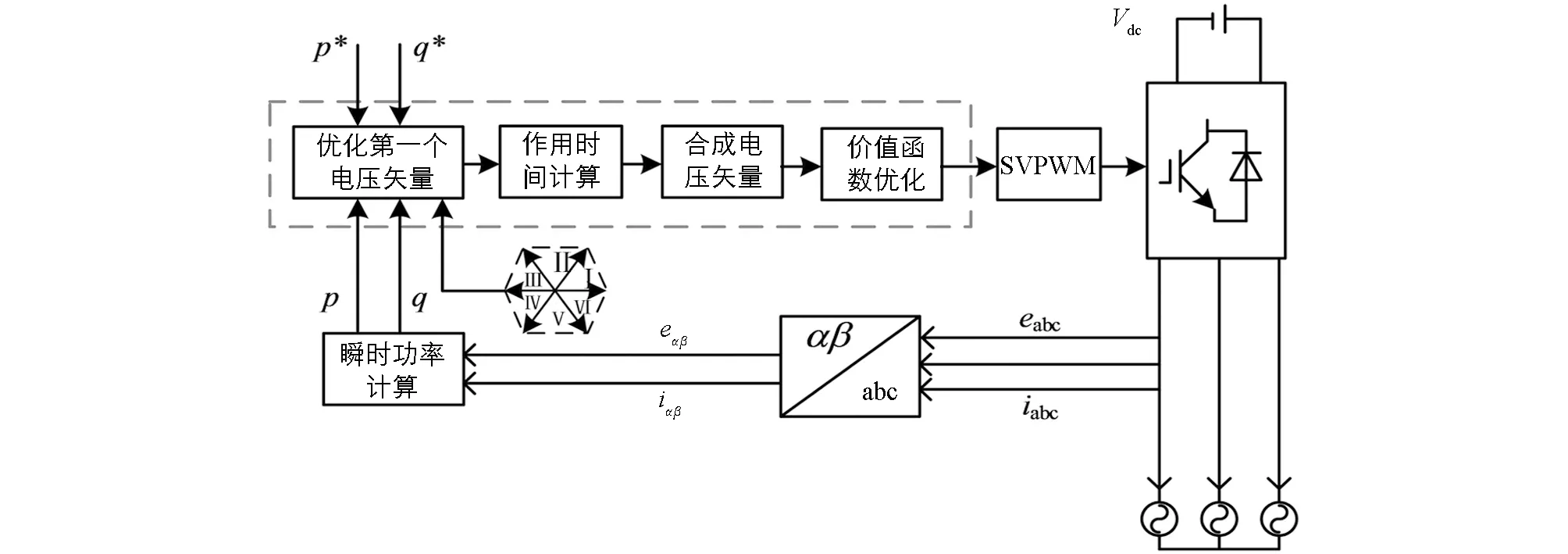
圖5 并網(wǎng)逆變器三矢量MPDPC系統(tǒng)控制框圖
3.2 矢量作用時(shí)間
根據(jù)無(wú)差拍控制原則,可將下一時(shí)刻的有功功率、 無(wú)功功率表示為
(17)
式(17)中sp1,sp2,spz分別為在第一個(gè)電壓矢量、 第二個(gè)電壓矢量、 零電壓矢量作用下有功功率的斜率,tz表示零電壓矢量作用的時(shí)間.
(18)
(19)
(20)
聯(lián)立式(10)-(12)、 式(17)-(20)可得到各矢量的作用時(shí)間:
(21)
tz=Ts-t1-t2
在計(jì)算出3個(gè)電壓矢量的作用時(shí)間后,還需要考慮其數(shù)值是否在0~Ts范圍內(nèi),可分如下4種情況:
1) 若t1,t2和tz均在0~Ts范圍內(nèi),則讓兩個(gè)有效矢量與一個(gè)零矢量作用于當(dāng)前控制周期.
2) 若t1和t2均在0~Ts范圍內(nèi),且tz未在0~Ts范圍內(nèi),則讓兩個(gè)有效矢量作用于當(dāng)前控制周期.
3) 若t1和t2中僅一個(gè)在0~Ts范圍內(nèi),且tz在0~Ts范圍內(nèi),則讓一個(gè)有效矢量與一個(gè)零矢量作用于當(dāng)前控制周期.
4) 若t1和t2中僅一個(gè)在0~Ts范圍內(nèi),且tz未在0~Ts范圍內(nèi),則讓一個(gè)有效矢量作用于當(dāng)前控制周期.
3.3 電壓矢量的合成
三矢量模型預(yù)測(cè)直接功率控制通過(guò)兩個(gè)有效電壓矢量與一個(gè)零電壓矢量來(lái)合成期望電壓矢量,三矢量模型預(yù)測(cè)直接功率控制的電壓矢量選擇如表1所示,期望電壓矢量uexp的合成如圖6所示.
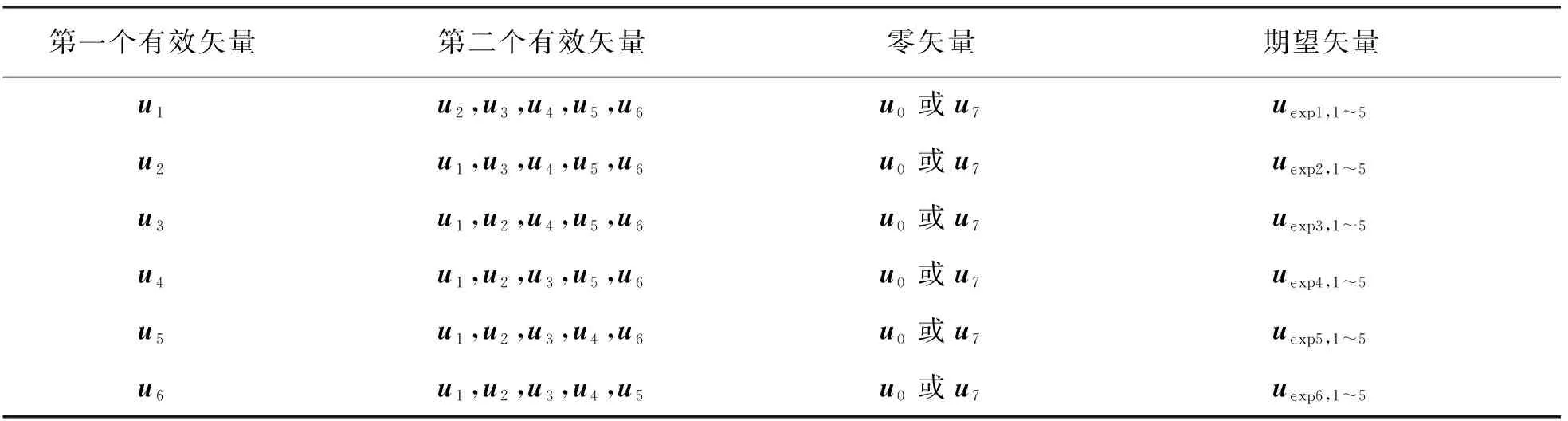
表1 三矢量模型預(yù)測(cè)直接功率控制矢量選擇
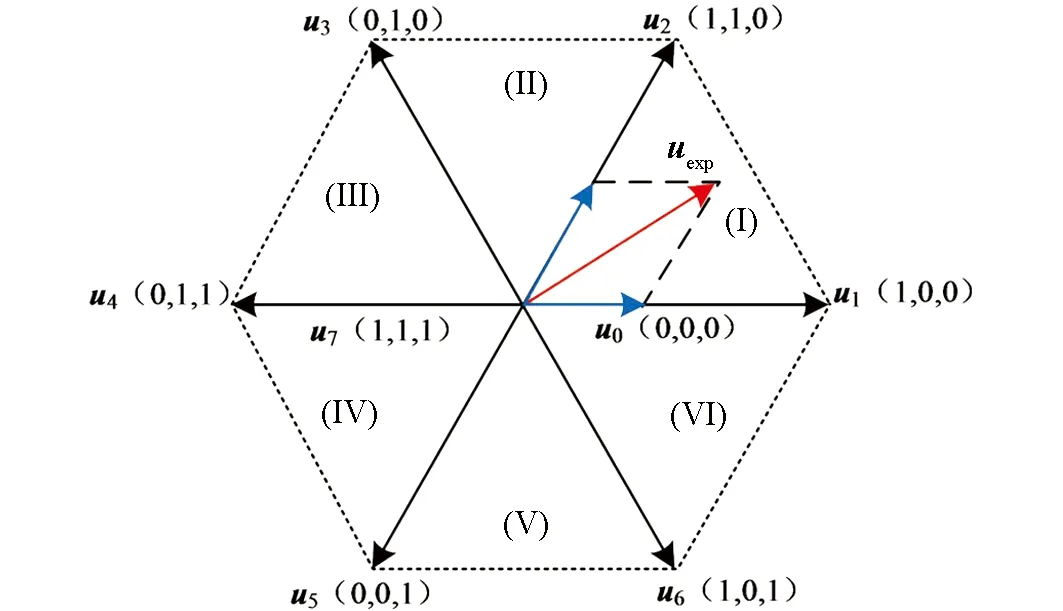
圖6 三矢量期望電壓矢量合成
基于三矢量的模型預(yù)測(cè)直接功率控制策略實(shí)現(xiàn)如下:
1) 根據(jù)單矢量模型預(yù)測(cè)直接功率控制策略選取第一個(gè)電壓矢量.
2) 根據(jù)式(10)-(12)、 式(17)-(20)計(jì)算功率斜率,并由式(21)得到3個(gè)矢量的作用時(shí)間,并分情況考慮其范圍.
3) 由式(15)、 式(16)得到6種期望電壓矢量在兩相靜止坐標(biāo)系下相應(yīng)的分量,并將其代入式(7)得到對(duì)應(yīng)的有功、 無(wú)功功率預(yù)測(cè)值.
4) 將預(yù)測(cè)的功率值代入式(8),選擇令g最小的期望電壓矢量輸出至空間矢量脈寬調(diào)制模塊.
4 3種控制策略的比較
根據(jù)上述3種模型預(yù)測(cè)直接功率控制策略的原理,表2對(duì)比了其矢量數(shù)目、 尋優(yōu)計(jì)算和電壓矢量作用時(shí)間計(jì)算方法,由該表可知,相比雙矢量法在單個(gè)控制周期內(nèi)需要13次尋優(yōu)且僅對(duì)無(wú)功功率完成無(wú)差拍控制,三矢量法則減少了尋優(yōu)次數(shù),降低了計(jì)算量,并通過(guò)有功功率和無(wú)功功率無(wú)差拍控制的方式來(lái)計(jì)算電壓矢量的作用時(shí)間,同時(shí)實(shí)現(xiàn)了對(duì)有功功率與無(wú)功功率的無(wú)差拍控制,可以取得更好的控制效果.

表2 3種控制策略的比較
5 仿真與實(shí)驗(yàn)結(jié)果分析
對(duì)單矢量、 雙矢量、 三矢量模型預(yù)測(cè)直接功率控制這3種控制策略在Matlab/Simulink中搭建了相應(yīng)的仿真模型進(jìn)行比較分析.并網(wǎng)逆變器參數(shù)見(jiàn)表3.

表3 并網(wǎng)逆變器參數(shù)
5.1 仿真結(jié)果分析
并網(wǎng)逆變器在3種模型預(yù)測(cè)直接功率控制下的穩(wěn)態(tài)網(wǎng)側(cè)三相電流波形如圖7所示.相比單、 雙矢量模型預(yù)測(cè)直接功率控制,在本文所提三矢量法控制下,網(wǎng)側(cè)三相電流波形更平滑、 正弦度更好.
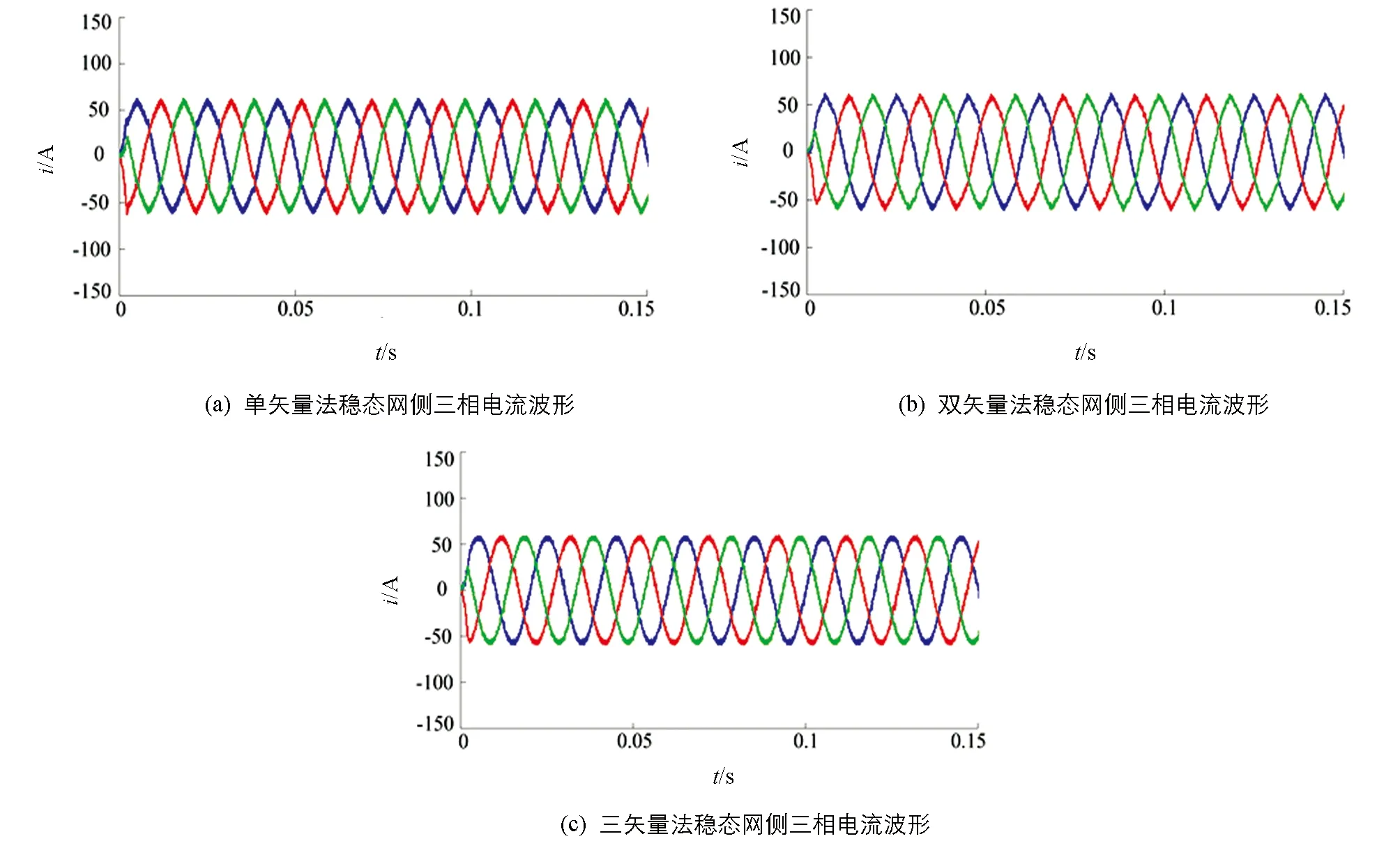
圖7 3種控制方法的穩(wěn)態(tài)網(wǎng)側(cè)三相電流波形
在0.2 s時(shí)將p*從25 kW突變到50 kW.由圖8可見(jiàn),在3種控制方法下的p都能快速響應(yīng)p*的改變,動(dòng)態(tài)性能較好,其中雙矢量法由于對(duì)無(wú)功功率實(shí)現(xiàn)了無(wú)差拍控制,故無(wú)功功率脈動(dòng)相比單矢量法有所改善,但有功功率脈動(dòng)仍較大.相比單矢量和雙矢量法,三矢量法同時(shí)對(duì)有功、 無(wú)功功率實(shí)現(xiàn)了無(wú)差拍控制,較好地改善了功率脈動(dòng),提高了控制精度.
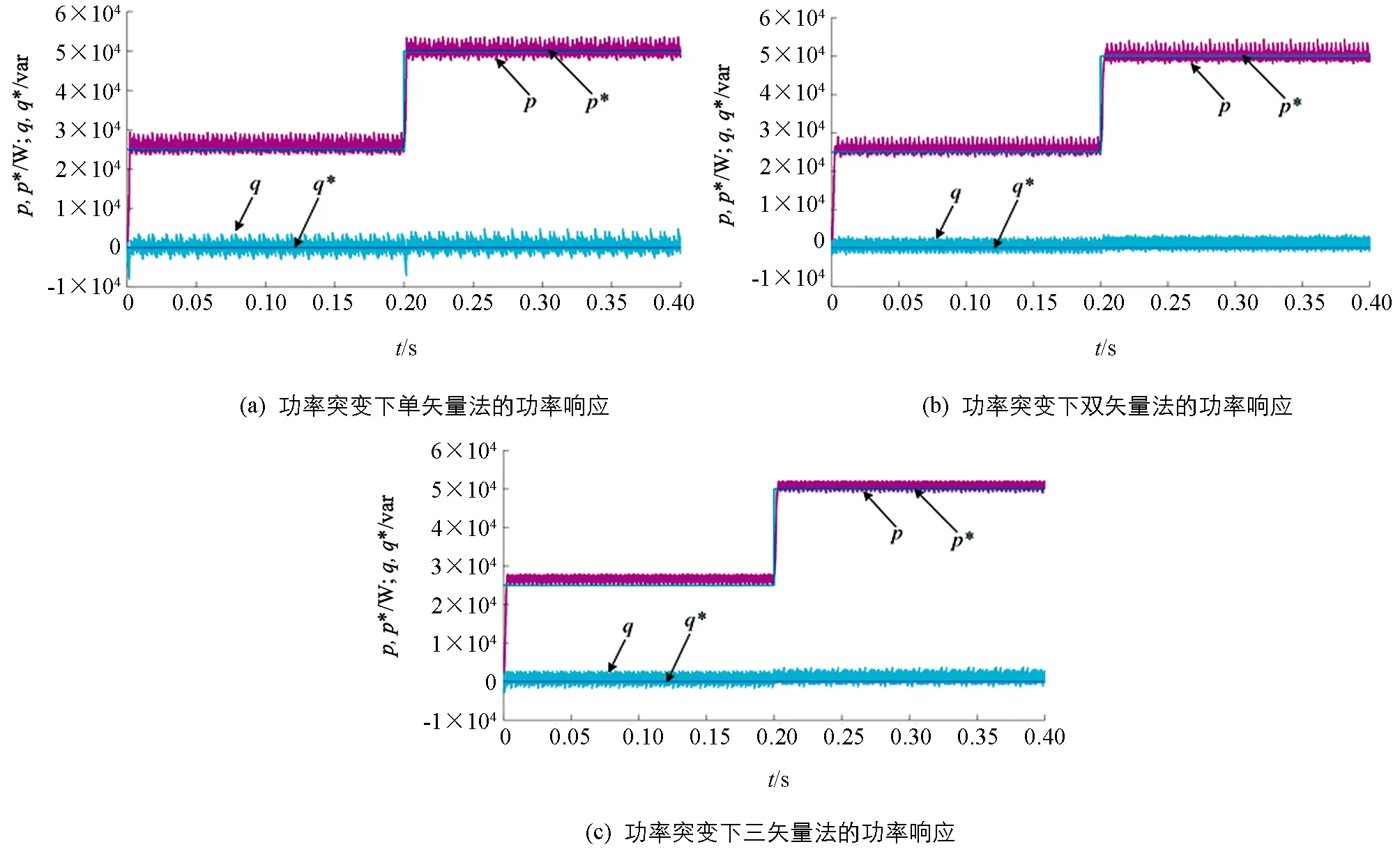
圖8 功率突變下3種控制方法的功率響應(yīng)
圖9為3種控制方法的網(wǎng)側(cè)A相電流動(dòng)態(tài)波形,其均可快速響應(yīng)p*的突變,具有較好的動(dòng)態(tài)性能.在逆變器采用單、 雙矢量法控制時(shí),電流均存在較明顯畸變,在逆變器采用三矢量法控制時(shí),電流波形平滑,正弦度較高,波形質(zhì)量得到較好改善.
圖10為3種控制方法的A相電流諧波畸變率,其均小于5%,滿足逆變器電流并網(wǎng)的國(guó)家標(biāo)準(zhǔn).相比單、 雙矢量模型預(yù)測(cè)直接功率控制,三矢量法的電流諧波畸變率更低,進(jìn)一步改善了并網(wǎng)電能質(zhì)量.
5.2 實(shí)驗(yàn)結(jié)果分析
為進(jìn)一步驗(yàn)證三矢量模型預(yù)測(cè)直接功率控制相比單、 雙矢量模型預(yù)測(cè)直接功率控制更有效,本文基于RT-LAB半實(shí)物仿真系統(tǒng)搭建了并網(wǎng)逆變器實(shí)驗(yàn)平臺(tái),實(shí)驗(yàn)與仿真的并網(wǎng)逆變器參數(shù)一致.
由圖11可見(jiàn),相比單、 雙矢量模型預(yù)測(cè)直接功率控制,三矢量法在有功功率給定值發(fā)生突變前后,網(wǎng)側(cè)三相電流正弦度更高,具有較好的波形質(zhì)量.
由圖12可見(jiàn),三矢量模型預(yù)測(cè)直接功率控制的電網(wǎng)電壓與網(wǎng)側(cè)A相電流幾乎同相位,功率因數(shù)較高,且在有功功率給定值突變后能迅速響應(yīng),相比單、 雙矢量模型預(yù)測(cè)直接功率控制波形更平滑、 控制效果更好.
綜上所述,相比于單、 雙矢量模型預(yù)測(cè)直接功率控制,本文所提三矢量模型預(yù)測(cè)直接功率控制具有更好的控制性能,實(shí)驗(yàn)結(jié)果驗(yàn)證了仿真與理論的有效性.
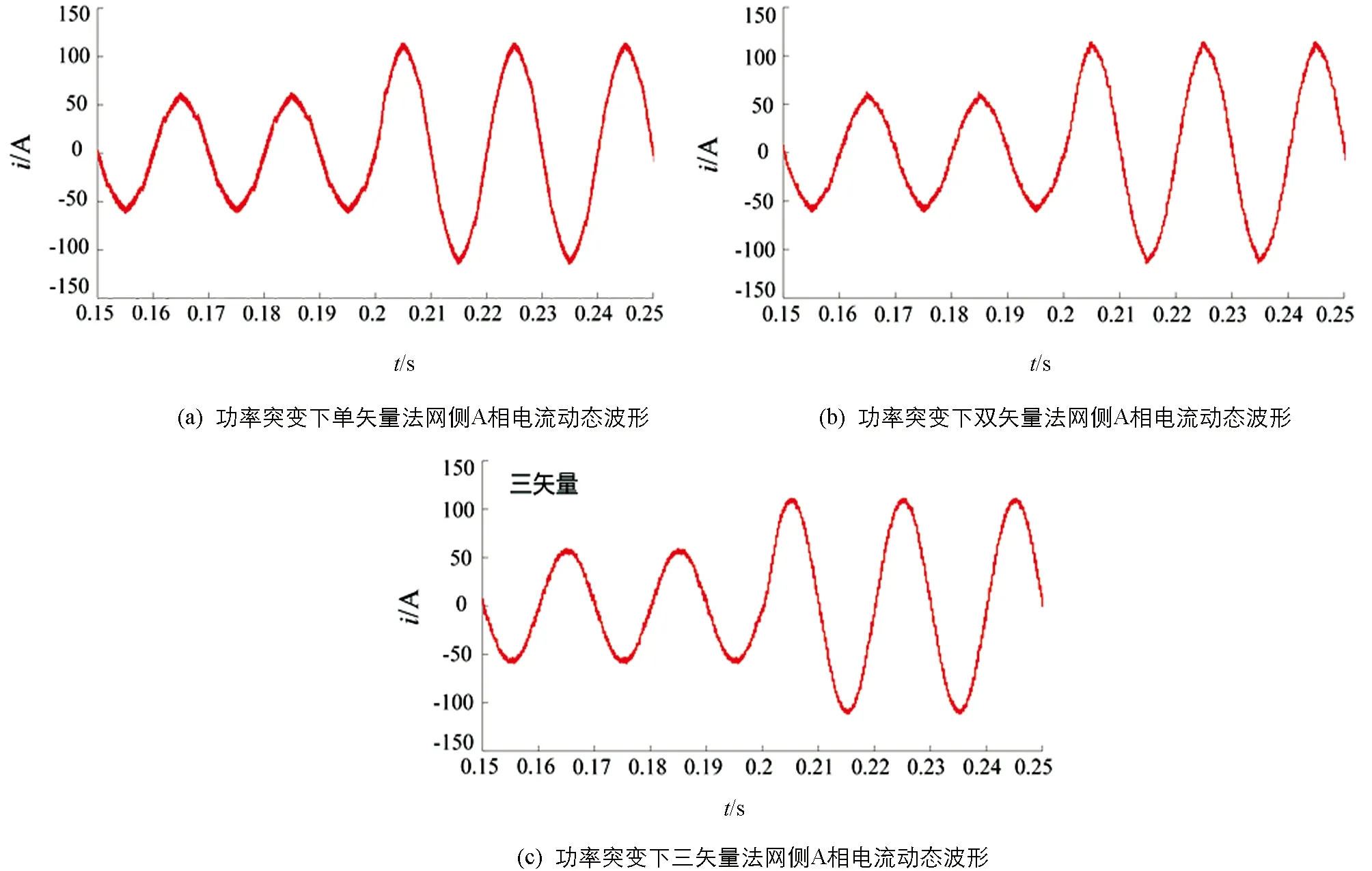
圖9 功率突變下3種控制方法的A相并網(wǎng)電流動(dòng)態(tài)波形
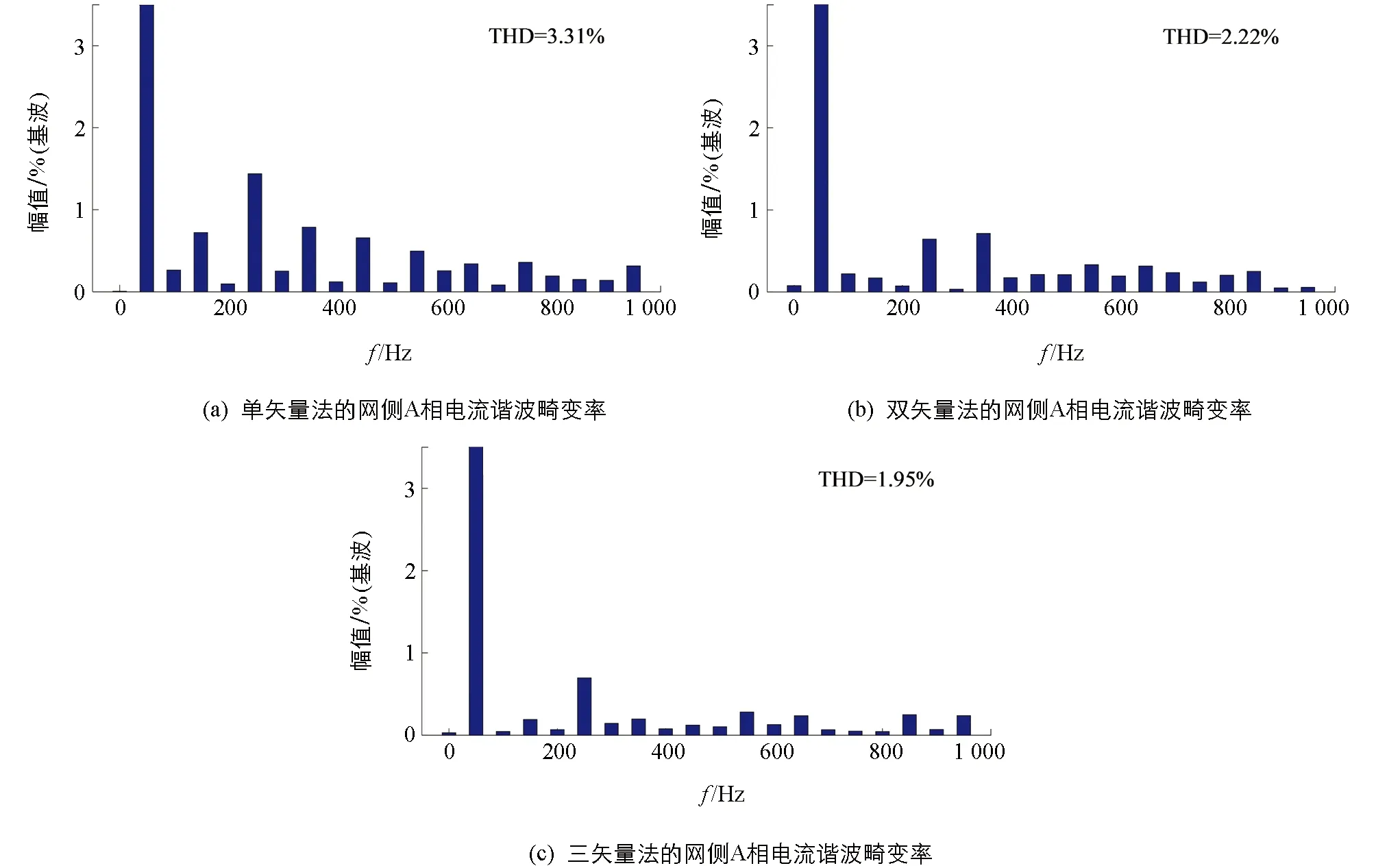
圖10 3種控制方法的網(wǎng)側(cè)A相電流諧波畸變率
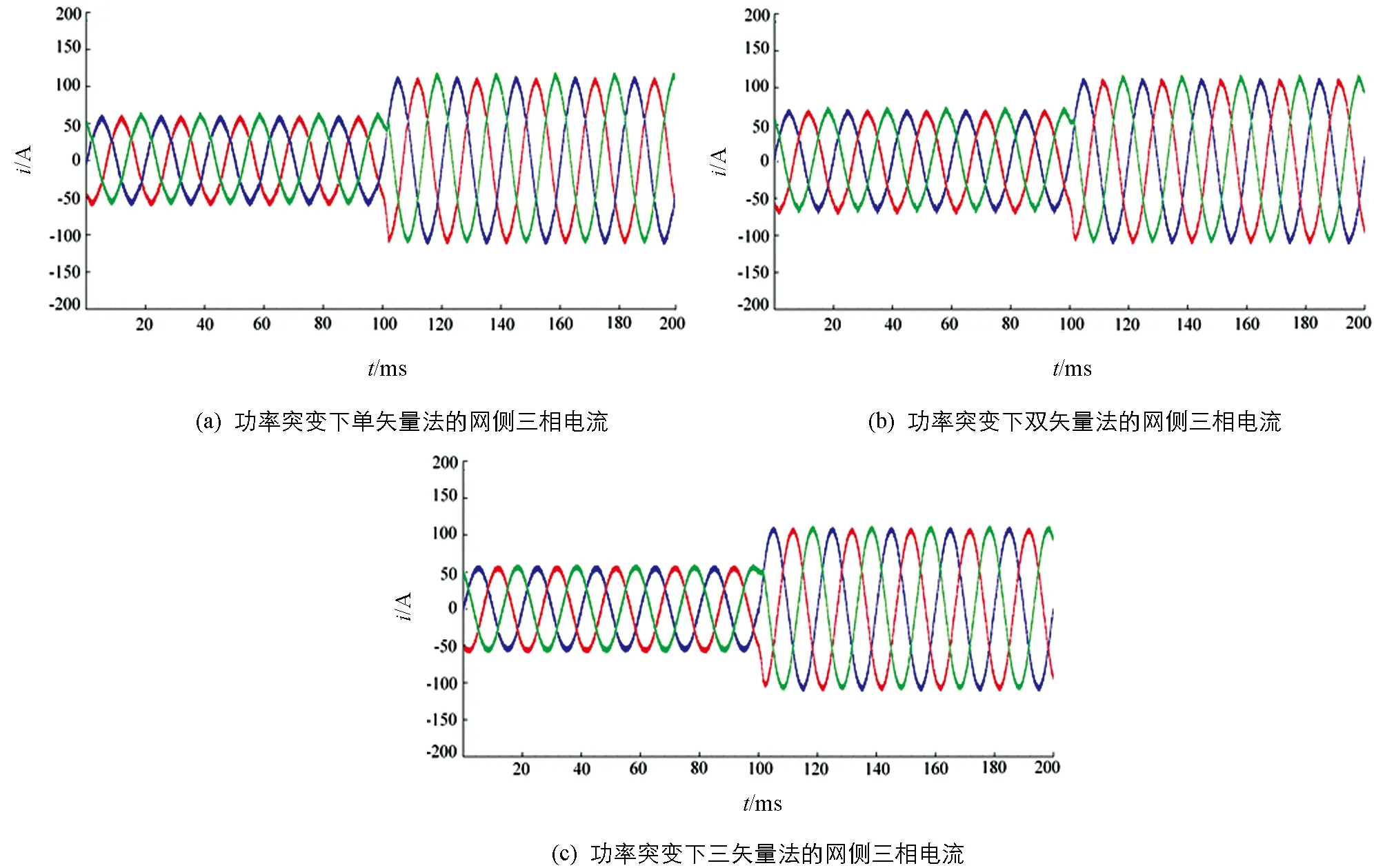
圖11 功率突變下3種方法的三相并網(wǎng)電流
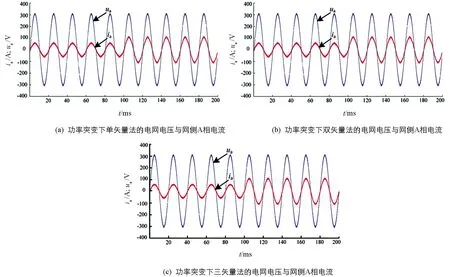
圖12 功率突變下3種方法的電網(wǎng)電壓與網(wǎng)側(cè)A相電流
6 結(jié)論
本文將并網(wǎng)逆變器作為研究對(duì)象,在傳統(tǒng)單矢量模型預(yù)測(cè)直接功率控制的基礎(chǔ)上引入雙矢量模型預(yù)測(cè)直接功率控制,并針對(duì)雙矢量法的局限性提出了一種三矢量模型預(yù)測(cè)直接功率控制策略.本文所提三矢量模型預(yù)測(cè)直接功率控制先在6個(gè)有效矢量中優(yōu)選第一個(gè)矢量,再將其與余下5個(gè)有效矢量連同零矢量合成期望電壓矢量,使輸出電壓矢量的幅值與方向均可調(diào),并同時(shí)對(duì)有功、 無(wú)功功率實(shí)現(xiàn)了無(wú)差拍控制,提高了功率控制精度.仿真與實(shí)驗(yàn)結(jié)果表明: 相比于前兩種控制方法,本文所提三矢量模型預(yù)測(cè)直接功率控制能較好地提高逆變器網(wǎng)側(cè)電流波形質(zhì)量,降低電流諧波畸變率,改善功率脈動(dòng),具有良好的動(dòng)態(tài)和穩(wěn)態(tài)性能.
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測(cè)與儀表(2014年24期)2014-04-09 11:35:36
 西南大學(xué)學(xué)報(bào)(自然科學(xué)版)2023年2期
西南大學(xué)學(xué)報(bào)(自然科學(xué)版)2023年2期
- 西南大學(xué)學(xué)報(bào)(自然科學(xué)版)的其它文章
- 基于虛擬流場(chǎng)與MSD模型的道路擁堵緩解算法
- 基于超級(jí)電容輔能的電動(dòng)微耕機(jī)復(fù)合電源系統(tǒng)研究與試驗(yàn)
- 1960-2019年河南省霜凍日期時(shí)空變化及影響因素研究
- 智能公共安全產(chǎn)業(yè)與成渝地區(qū)雙城經(jīng)濟(jì)圈發(fā)展的適應(yīng)性耦合關(guān)系研究
- 創(chuàng)業(yè)能力、創(chuàng)業(yè)堅(jiān)持與農(nóng)民工返鄉(xiāng)創(chuàng)業(yè)幸福感
——鄉(xiāng)土情結(jié)的調(diào)節(jié)作用 - 2001-2018年華北平原森林面積變化及影響因素分析