國外蛙人水下輸送平臺技術發(fā)展綜述
2023-01-27 05:45:36鐘宏偉陳迎亮劉東林張筱芃李楚涵
水下無人系統(tǒng)學報 2022年6期
周 超 ,鐘宏偉 ,陳迎亮* ,劉東林 ,丁 盛 ,張筱芃 ,李楚涵
(1.中國人民解放軍92228 部隊,北京,100072;2.中國船舶集團有限公司 第705 研究所昆明分部,云南 昆明,650101)
0 引言
蛙人(水下特戰(zhàn)隊員)是指海軍陸戰(zhàn)隊和特種作戰(zhàn)部隊中配備輕型潛水裝具等特種裝備遂行兩棲作戰(zhàn)任務的人員,其能夠分散、獨立、隱蔽活動,具有靈活精悍、行動詭秘等特點。
蛙人水下作戰(zhàn)時需通過水下/水面輸送平臺秘密將特戰(zhàn)隊員或物資投送到指定水下區(qū)域,以實現(xiàn)隱蔽滲透,破襲對手的目的。因此水下戰(zhàn)場信息獲取、精確導航定位、爆破打擊、水下生命支持及隱蔽運輸保障技術能力是蛙人作戰(zhàn)系統(tǒng)裝備技術的關鍵,決定著特戰(zhàn)隊員能否順利、有效地完成作戰(zhàn)任務。
蛙人水下特種裝備主要包括具有濕式、干式、水面/水下混合式特性的小型、大型蛙人投送裝備,遂行作戰(zhàn)使用的引導裝備,自衛(wèi)及破襲的武器裝備和維護各作戰(zhàn)裝備正常運行的保障裝備。蛙人水下特種裝備技術體系如圖1 所示。

圖1 蛙人水下輸送平臺技術體系圖Fig.1 Technical system diagram of diver underwater delivery vehicles
文章通過對國外水下蛙人輸送平臺發(fā)展現(xiàn)狀進行深入分析,梳理了其技術體系,提出了亟待突破的關鍵技術及發(fā)展趨勢,以期為我國蛙人水下作戰(zhàn)系統(tǒng)與裝備技術的發(fā)展提供參考。
1 蛙人水下輸送平臺發(fā)展現(xiàn)狀
現(xiàn)有的蛙人水下輸送平臺按照功能可分為濕式蛙人輸送平臺、干式蛙人輸送艇和水面/水下蛙人輸送艇3 類。
1.1 濕式蛙人輸送平臺
濕式蛙人輸送平臺是一種可阻擋水流、浸沒于水中、具有密閉空間的載人平臺,其包括蛙人運載器和蛙人輸送艇。各國對此類裝備的開發(fā)和研制相當重視,不斷采用新技術來完善其特有的隱蔽攻擊能力,并形成系列化的產(chǎn)品[1]。目前,在水下作戰(zhàn)中被廣泛采用、具有高可靠性和一定戰(zhàn)斗力的濕式蛙人輸送平臺技術仍具有發(fā)展空間,并將在一定時期內(nèi)起著不可低估的作用。未來,濕式蛙人輸送平臺技術將向著智能化、模塊化、專業(yè)化、多樣化、群組化和網(wǎng)絡化方向發(fā)展。
最初的濕式蛙人輸送平臺通過潛艇魚雷發(fā)射管或艦艇釋放,其流體外形主要有魚雷型(圓柱形)和艦艇型,可搭載2 名及以上特戰(zhàn)隊員或一定數(shù)量的有效載荷。濕式蛙人運載器一般可搭載2~4 人,濕式蛙人輸送艇可搭載8~16 人。為減少特戰(zhàn)隊員在作戰(zhàn)航渡期間承受的水流沖擊和體能消耗,主要采用濕式密封的設計技術。目前世界主要國家的典型在研產(chǎn)品如下。
1)美國
20 世紀70~80 年代,美國海軍實驗室基于集成推進電機、電池及導航等技術成果研制出新型濕式蛙人輸送艇,以MK 8-0 外形作為后續(xù)艇型,航速6 kn、續(xù)航力18 n mile,可將1 個班組的“海豹”隊員(6 人)投放到中等距離遠的地方[2]。20 世紀70 年代末,在MK 8 基礎上研制完成了MK 9蛙人輸送艇,該艇在6 kn 航速下,具有37 n mile 的最大續(xù)航力,可搭載2 名特戰(zhàn)隊員和MK-31 輕型魚雷,增加了在防區(qū)外攻擊敵艦艇的能力;再改型的MK 9-1 可搭載2 名艇員和大型深彈。但是,無論是MK 8-0 還是MK 9 都存在作業(yè)距離近,只能在淺水區(qū)域投放,容易被探測或擱淺的不足,且由于缺少通用部件,維護費用高昂。上述原因促使美國海軍亟待發(fā)展一種全新的蛙人輸送艇技術。
1988 年,美海軍提出了改裝蛙人輸送艇的要求,并于20 世紀90 年代通過了第1 艘MK 8-1 蛙人輸送艇技術評估[3],該艇基本尺寸與MK 8-0 型相似,最大航速達9 kn,續(xù)航力為36 n mile,內(nèi)部空間更大;可攜載6 名特戰(zhàn)隊員,并搭載大型深彈;裝有先進的電子設備,包括帶自動導航儀的自動進塢系統(tǒng)、用于水雷探測和蔽障的高頻聲吶,目前正在加裝帶浮標天線的全球定位系統(tǒng)接收儀[4]。MK 8-1 的研制成功標志著美國海軍蛙人輸送艇設計已趨于成熟,在投放能力方面處于世界領先地位,其技術規(guī)格、作戰(zhàn)性能、靈活性以及成本的高效運用,吸引了世界上許多國家的關注。
隨后,哥倫比亞集團對MK 8-1 的結構和維修性進行改進,研制出“Gator SDV”(Piranha SDV-X),如圖2 所示。該艇尾部外形在MK 8 基礎上,增加了一塊活動蓋板以減小水流沖擊對特戰(zhàn)隊員的影響,可并排坐2 人,航速達7 kn;動力系統(tǒng)采用銀鋅電池及直流無刷電機單槳驅動技術,動力強于動力定位的船舶(dynamically positioned vessel,DPV);導航技術采用成熟商用的儀表及避障聲吶[5],以方便運輸及降低成本。
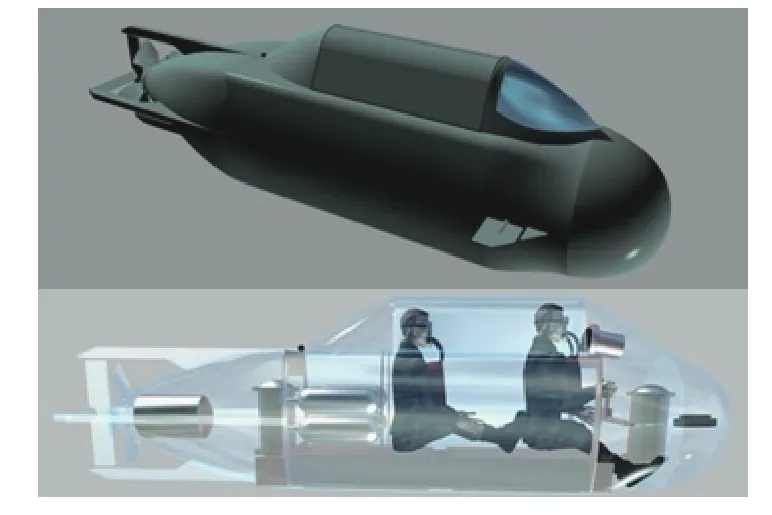
圖2 Piranha SDV-X 外形結構設計圖Fig.2 Structure design of Piranha SDV-X
未來,美國的淺水作戰(zhàn)潛器(shallow water combat submersible,SWCS)—MK 11 將取代MK 8-1,其長6.8 m、寬1.5 m、高1.5 m,質量4 056 kg,航程150 n mile,航速6~12 kn,不帶水聽陣,可搭載6 名以上艇員。其外形由美國特力戴布朗工程公司設計,如圖3 和圖4 所示[6]。該艇于2014 年進行交付前的第1 次海試,并于2017 年服役[7]。
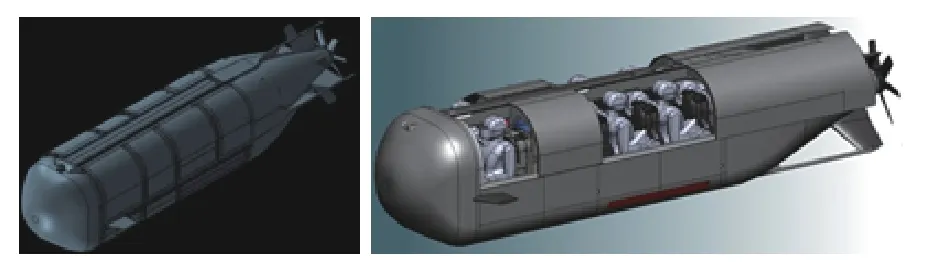
圖3 MK 11 外形結構設計圖Fig.3 Structure design of MK 11

圖4 MK 11 濕式蛙人輸送艇原理樣機尾段結構Fig.4 Principle prototype tail structure of wet diver delivery vehicle (MK 11)
美國巴特勒公司、金槍魚公司和哥倫比亞集團公司利用結合研制無人水下航行器(unmanned undersea vehicle,UUV)和蛙人輸送艇技術的成功經(jīng)驗,融入有人與無人操控的設計概念,聯(lián)合研發(fā)出具備充足能源、長距離運送有效載荷、水下長持久力的新一代雙模蛙人輸送艇“普羅特斯”(PROTEUS)。該艇以海豹突擊隊曾使用的美國高級海豹輸送系統(tǒng)(advanced Seal delivery System,ASDS)為基本外型(見圖5),具有強大的搭載能力,既可搭載1 500 kg 的有效載荷,還可搭載用于布雷或攻擊的武器,以及其他可快速執(zhí)行任務的小型UUV,必要時作為水下前沿作戰(zhàn)的補給母艇;航速為2~4 kn 時,最遠航程可超過900 n mile(電池總能量為296 kW·h);通過采用標準模塊化艙段設計,攜帶生命支持系統(tǒng),可搭載6~8 名特戰(zhàn)隊員;連續(xù)作戰(zhàn)時,其充電時間較長,但快速能源補給技術已于近期獲重大突破。優(yōu)化后的PROTEUS 技術參數(shù)為: 外形尺寸長7.82 m,寬1.61 m,高1.62 m,外殼采用玻璃纖維非金屬材料合成,干重質量為3 737 kg;正常荷載能力下最大潛深可達45.72 m,以最高航速10 kn 航行可續(xù)航50 h;采用均衡負載技術,可在平臺兩側各搭載725 kg 有效載荷[8]。

圖5 多功能雙模蛙人輸送艇PROTEUSFig.5 Multi-function dual mode of diver delivery vehicle PROTEUS
2)英國
英國的SUB Seal 是一型基于MK 8 設計改造的先進水下作戰(zhàn)蛙人輸送艇[9],如圖6 和圖7 所示。該艇由英國詹姆斯?jié)O業(yè)防務公司(James Fisher Defence,JFD)生產(chǎn),通過在MK 8 中部增加一個特殊的干式甲板換乘艙(dry deck shelter,DDS)形成濕態(tài)下干艙模式的防濕態(tài)環(huán)境,以保存作戰(zhàn)人員的體力,增強特戰(zhàn)隊員作戰(zhàn)能力。在保留MK 8 多種優(yōu)勢技術的同時,該艇增加了很多現(xiàn)代技術組件,使得整個裝備具有更佳的操縱性;在尾部的主推進器取消了后控制水平舵,使得特戰(zhàn)隊員可面向氧氣儀表面板;整艇經(jīng)優(yōu)化設計后,空間尺寸為長7.4 m、寬1.7 m、高1.6 m,干重質量為3 500 kg;該艇航速大于7 kn,巡航速度5 kn,續(xù)航力50 n mile,作戰(zhàn)深度30 m,可搭載10 名作戰(zhàn)突擊隊員(前艙2 名領航員,中段一排4 名隊員,共2 排)和200 kg濕式狀態(tài)有效載荷;動力系統(tǒng)由2 個10 kW 的主電機和2 個 2 kW 助推器組成,以鋰磷酸電池作為能源;采用一體設計將傳感器布置在光電罩上,同時將通信、聲吶等組件集成于作戰(zhàn)系統(tǒng)中。
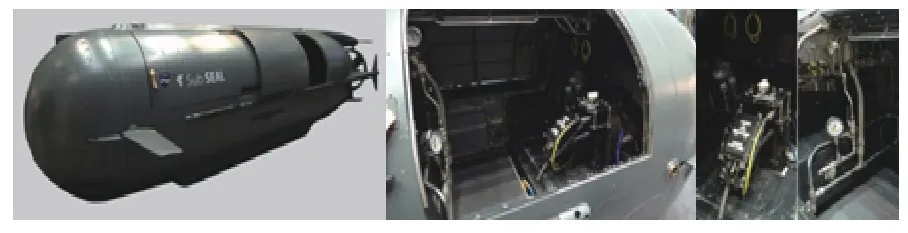
圖6 SUB Seal 濕式蛙人輸送艇外形及內(nèi)艙電子部件布置Fig.6 External and internal cabin electronic components of wet diver delivery vehicle SUB Seal
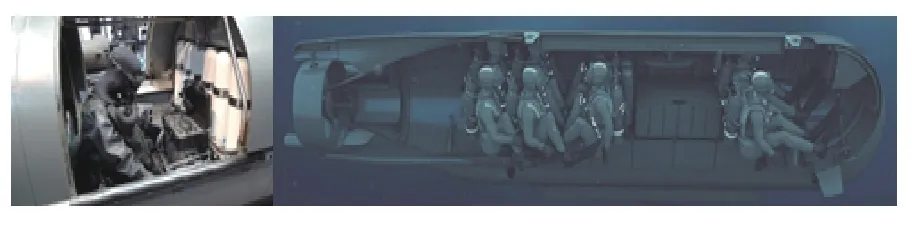
圖7 SUB Seal 濕式蛙人輸送艇載人內(nèi)艙布置的生命系統(tǒng)Fig.7 Life system of wet diver delivery vehicle SUB Seal in internal cabin
3)意大利
意大利自20 世紀90 年代以來研制了多型濕式蛙人輸送艇,其中現(xiàn)役裝備技術性能最好的是CE2F/X100-T 艇,如圖8 所示。該艇長7 m,外徑0.8 m,高1.5 m,排水量2.1 t[9],最大潛航速度5 kn,巡航速度4 kn,續(xù)航力約50 n mile,作業(yè)深度30 m,最大深度可達100 m,可搭載2 名特戰(zhàn)隊員[10];輸送艇底部掛載武器系統(tǒng),可由偽裝漁船輸送或直升機直接投送;采用衛(wèi)星定位技術進行精確導航;可通過整體集成控制模塊技術升級艇的性能,自動駕駛系統(tǒng)由全球定位系統(tǒng)(global positioning system,GPS)和數(shù)字羅盤技術集成;可搭載5 枚微型魚雷及武器發(fā)射器[10]。
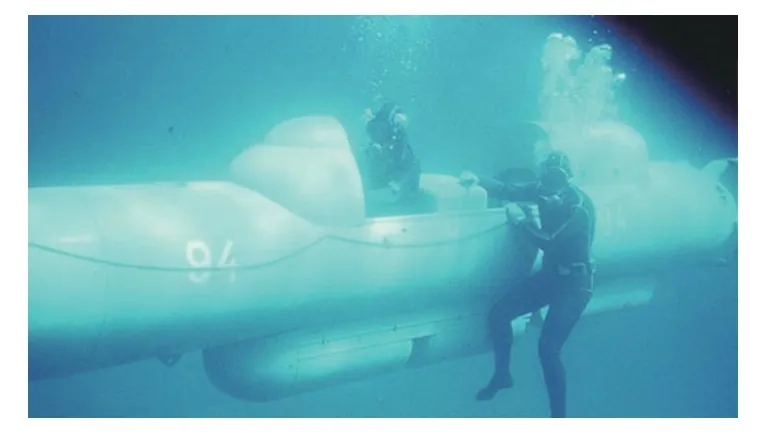
圖8 CE2F/X100-T 艇Fig.8 CE2F/X100-T swimmer delivery vehicle
4)德國
Gabler WTD71 型蛙人運載器是德國Gabler 公司根據(jù)海軍特種部隊的作戰(zhàn)需求設計的一款可搭載于潛艇形似魚雷的蛙人運載平臺[11],如圖9 所示。該運載器主要技術特點有: 采用長度可縱向伸縮、徑向翼板可折疊擴展的防護外殼(罩)技術,將特戰(zhàn)隊員與沖擊水流隔離,可搭載2 名特戰(zhàn)隊員或裝備;通過優(yōu)化設計,改善了艇內(nèi)的舒適性,最大程度減少了特戰(zhàn)隊員的體力消耗;外殼殼體采用防水、穩(wěn)固、無磁性的材料技術,特有的全無磁蛙人支持系統(tǒng)可滿足在淡水或海水中的作戰(zhàn)要求,當其被魚雷發(fā)射管釋放后,特戰(zhàn)隊員及平臺能快速進入作戰(zhàn)模式;可將2 個或多個運載器組合在一起,以形成高戰(zhàn)斗力的作戰(zhàn)裝備;采用533 mm口徑魚雷外形設計,優(yōu)化后外形最大長度為3.4 m,釋放后運載器展開長度達5 m,內(nèi)部直徑擴展至約0.7 m,航速3 kn,航程10 n mile。

圖9 Gabler WTD71 照片F(xiàn)ig.9 Picture of the Gabler WTD71
5)小結
目前在研濕式蛙人輸送平臺的國家主要有美國、德國、意大利、英國及瑞典等,約近10 種型號,主要有美國MK 系列、意大利CE2F 系列、德國Gabler 公司的蛙人輸送平臺、瑞典Seal 蛙人輸送平臺、阿聯(lián)酋和伊朗聯(lián)合研制的A1 Sabehar、克羅地亞的R-1 和R-2 等。其中: 美國MK 8 型擁有最先進的濕式蛙人輸送艇技術;意大利的濕式蛙人輸送艇可攜帶5 枚微型魚雷,采用控制模塊技術,具有極強的攻擊力;瑞典的濕式蛙人輸送艇實現(xiàn)了水面/水下作業(yè),水面高速接近任務區(qū),水下低速執(zhí)行任務;德國Gabler 公司的蛙人輸送平臺采用魚雷外型設計,既可組成4 人一組的作戰(zhàn)分隊,亦可單兵作戰(zhàn);阿聯(lián)酋的圓柱形輸送艇自治性高、導航能力強、負載能力大;俄羅斯的蛙人輸送艇則突出自主性。
綜上所述,下一代濕式蛙人輸送平臺將集各種專業(yè)技術所長,朝著具有特殊用途作戰(zhàn)需求的方向發(fā)展[12]。部分典型濕式蛙人輸送平臺技術性能對照參見表1。

表1 典型濕式蛙人輸送平臺技術性能指標Table 1 Technical performance of typical Sea-Air-Land(SEAL)delivery vehicle
1.2 干式蛙人輸送艇
美國ASDS 是一種典型的干式蛙人輸送艇(如圖10 所示)[13],其可由核潛艇、水面艦艇或運輸機攜帶至目標近海投放,并自航至作戰(zhàn)海域[14]。ASDS 艇長19.8 m,直徑2.4 m,干重質量55 t,艇殼為高強度玻璃鋼,磁性水雷無法對其構成威脅。其尾部安裝有1 個超氣壓處理室供受傷人員醫(yī)療救治;中部是1 個干式艙,可提供舒適的水下航渡環(huán)境,有利于特戰(zhàn)隊員保存體力,增強戰(zhàn)斗效能,最高可容納16 人(如果搭載較多裝備,通常搭載8 人),另配有1 個供特戰(zhàn)隊員快速進出的密封轉換艙。ASDS 動力系統(tǒng)由功率為42 kW 的電動機帶動尾部螺旋槳驅動,采用鋰離子電池,最高航速8 kn,最大航程125 n mile,最大作戰(zhàn)深度60 m;另有2 個艏部推進器和2 個艉部推進器來保證良好的操縱性。艇上配置有先進的主被動聲吶系統(tǒng)、雷達以及電子潛望鏡(配備電子攝像機,而不是傳統(tǒng)的光學設備),可供蛙人水下特種作戰(zhàn)部隊進行水下態(tài)勢分析,并在登陸前對海岸進行監(jiān)視[14];桅桿上裝有光電傳感器,能捕獲夜間影像,并通過數(shù)據(jù)鏈傳輸給指揮部門;此外,在ASDS 上安裝了ATM85 遙控聲吶信號調制解調器后,其可作為一種載人袖珍潛艇,在100 m 深度巡航時,通過國際互聯(lián)網(wǎng)向岸上設施發(fā)送電子郵件,不必從水下伸出天線,提高了潛艇的隱蔽性。2009 年,ASDS 因燃燒事故退役。

圖10 搭載于潛艇平臺上的ASDSFig.10 ASDS mounted on the submarine platform
在ASDS 的基礎上,美國還研制了3 款基于商用技術、體積較小的干式蛙人輸送艇,也叫用戶作戰(zhàn)評估系統(tǒng)(user operational evaluation system,UOES)1~3,即UOES1(S30li),UOES2(S351)和UOES3(Button5.60)[15-16]。其中,UOES1 是由美國洛克希德馬丁公司和英國MSUBS 公司共同設計研制(如圖11所示),其外形長7.25 m,外徑2.34 m,高1.75 m,排水量13.1 t,最大潛航速度7.6 kn,最大潛深100 m,可以搭載2 名駕駛員和6 名特戰(zhàn)隊員,于2013 年11 月交付美海軍,2014 年2 月完成蛙人試水;UOES2由英國MSUBS 公司設計制造(如圖12所示),其外形長11.9 m,外徑2.2 m,高2.5 m,排水量26 t,最大潛航速度10 kn,最大潛深125 m,可以搭載2 名駕駛員和8 名特戰(zhàn)隊員,于2014 年7 月交付美海軍,2015 年2 月完成艇身強度測試;UOES3 是由通用動力電船公司和意大利GSE Trieste 公司共同研制(如圖13 所示),其外形長9.7 m,外徑1.9 m,高1.9 m,排水量17.7 t,最大潛深110 m,可以搭載2 名駕駛員和4 名特戰(zhàn)隊員,2014 年10 月交付美海軍并完成測試工作。

圖11 干式蛙人輸送艇UOES1Fig.11 Dry diver delivery vehicle UOES-1
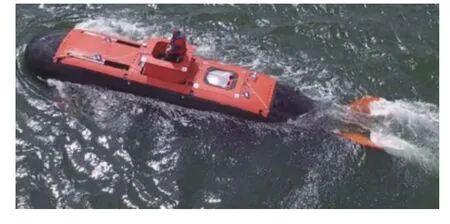
圖12 干式蛙人輸送艇UOES2Fig.12 Dry diver delivery vehicle UOES-2

圖13 干式蛙人輸送艇UOES3Fig.13 Dry diver delivery vehicle UOES-3
1.3 水面/水下蛙人輸送艇
水面/水下蛙人輸送艇是一種采用在水面高速,水下低速航行的新概念輸送平臺,集水面運載母船和蛙人輸送艇的功能于一身,無需水面搭載轉駁,即可完整地實現(xiàn)蛙人高速、遠程、隱蔽輸送等特種作戰(zhàn)任務。
美國的多用途作戰(zhàn)艇(multi role combatant craft,MRCC)既可在海面高速行駛,又能下潛到海水中一定深度航行[17],在水面或半潛航行時,由安置在耐壓殼中的435 PS(約320 kW)增壓柴油發(fā)動機驅動;下潛航行時,則由鋰離子電池為2 個無刷直流推進器提供動力。水面航行時,航速為30 kn時續(xù)航力為250 n mile,航速為35 kn 時續(xù)航力為180 n mile,最大下潛深度20 m,艇殼采用鋁合金材料,外層包裹有聚氨酯合成泡沫類材料。
英、美聯(lián)合開發(fā)的SBS MKIII 輸送艇具有戰(zhàn)術綜合運用能力強、操作簡單、保養(yǎng)維修成本低、投入戰(zhàn)斗速度快、可實現(xiàn)快速反應的特點[3]。該艇可由潛艇、水面艦艇、直升機甚至小型民用漁船攜帶,體積小,隱蔽性好;可搭載6 名特戰(zhàn)隊員和武器裝備,采用的半潛設計技術可緩解特戰(zhàn)隊員長時間在水下呼吸帶來的疲勞和各種生理方面的不適;外殼采用涂橡膠材料制成,在殼體的各充氣構件之間有塑料甲板。
英國James Fisher Pod 101 是MK1 的升級型產(chǎn)品,為顯著降低目標特征信號,在進入半潛狀態(tài)前可以在水面高速航行,其在水面航行時靠柴油機驅動;水下則由電池動力驅動。
瑞典DCE AB 公司為英國皇家海軍特戰(zhàn)隊員研制的Seal MK1 輸送艇是由DGB(diver group boat)專用艇改裝而成[18]。該艇于2001 年開始設計,2009 年初完成投產(chǎn)艇型,2011 年正式交付給英國皇家海軍特別舟艇部隊。其采用碳纖維增強的乙烯基酯材料制成單層艇殼,帶有可充氣船圍保持其穩(wěn)定性,艇底龍骨經(jīng)過強化處理,可用于登灘行動;艇內(nèi)可容納2 名操艇人員和6 名特戰(zhàn)隊員,有400 m3的有效載荷、潛水設備以及救生呼吸設備的存儲空間等;水面航行狀態(tài)下,可抵抗3 級海況,水面巡航速度25 kn,滿載下的最大航速30 kn,半潛或水下潛航速度僅5 kn,水面轉水下只需耗時150 s;依靠柴油發(fā)動機續(xù)航可達180 n mile。
韓國的SDV-1000W 是2009 年VOGO 公司借助瑞典技術合作開發(fā)的水面/水下蛙人輸送艇,其采用混合動力驅動方式,水面航速達35 kn,最大航程130 n mile。水下航行時由電機提供動能,水深18 m 環(huán)境下續(xù)航時間達3 h,最大航程25 n mile;可攜帶10 名全副武裝的特戰(zhàn)隊員。已有5 艘部署于韓國海軍特種作戰(zhàn)旅[19]。為適應集裝箱運輸和空投的需求,該型產(chǎn)品于2013 年和2015 年又發(fā)布了2 個不同的版本,更改了最初的動力設計,將可調槳改成了噴水推進器,以獲得更好的航行性能。
2003 年,俄羅斯成功研制出水面/水下蛙人輸送艇“海神”[18],其外形與美國MRCC 相似,水面高速航行時依靠渦輪柴油機(435 PS,約319.725 kW)驅動,水下航行時則以電動力驅動。該艇長9.9 m,高1.68 m,最大工作深度約20 m,可運載2 名操作人員和4 名特戰(zhàn)隊員,最大載重636 kg。水面最大航速24 kn,航程約130 n mile;半潛航行最大航速5 kn,航程120 n mile;水下最大航速3 kn,航程約6 km。
法國的“海怪-90”輸送艇上安裝有90 PS(約66.15 kW)的雅馬哈發(fā)動機[3],航速為20 kn,水面續(xù)航力90 n mile,可保證在水下5 m 深度機動航行,極限潛水深度50 m。
荷蘭設計的水面/水下蛙人輸送艇P-7(PHANTOM-7)[18],能夠輸送7 名特戰(zhàn)人員及裝備,具有水面高速滑行、水面低速航行和水下航行3 種模式,最大深度30 m,水面航行時最大航速>30 kn,航程約300 n mile,由260~310 PS(約191.1~227.85 kW)的柴油機進行驅動,采用泵噴推進器,殼體采用碳纖維復合材料和高強度環(huán)氧樹脂,座艙蓋采用聚碳酸酯,內(nèi)部裝置和設備采用316 海上級別不銹鋼。
2 技術體系
2.1 水下輸送平臺技術
如圖1 所示,水下輸送平臺技術主要包含平臺總體、動力推進、航行控制、導航定位、通信指揮、蛙人艙室、避碰探測、材料及綜合管控技術等。
1)平臺總體技術是蛙人水下輸送平臺最基本的技術。
2)動力推進技術保障蛙人水下輸送平臺作戰(zhàn)范圍可達與作戰(zhàn)時機有效。
3)航行控制技術保障蛙人水下輸送平臺航渡過程姿態(tài)穩(wěn)定。
4)導航定位技術保障特戰(zhàn)隊員在復雜水文環(huán)境中能獲取精確的導航定位信息。
5)通信指揮技術保障特戰(zhàn)隊員的準確投放,實現(xiàn)作戰(zhàn)協(xié)調一致。
6)蛙人艙室技術保障特戰(zhàn)隊員在水下或半潛式航行過程中有一定空間舒適性和體力持久性。
7)避碰探測技術保障特戰(zhàn)隊員和蛙人水下輸送平臺在復雜且不確定性較高的近岸或潛水行動環(huán)境中實時探測周圍路線。
8)材料技術保障蛙人水下輸送平臺在復雜水域環(huán)境中不被腐蝕,在大深度海域中具有較好的耐壓性能。
9)綜合管理控制技術保障蛙人水下輸送平臺的供電控制以及平臺與特戰(zhàn)隊員間的信息交互管理。
2.2 保障技術
蛙人水下特種裝備保障技術主要包含輸送平臺及各系統(tǒng)功能檢測技術、平臺載具的布放回收技術、輸送平臺及載具進行日常操練的模擬訓練技術以及保證各種設備正常運行的使用保障技術等。
1)系統(tǒng)功能檢測技術包括功能、操控和其他檢測。功能檢測用于輸送平臺使用前對產(chǎn)品進行調試及技術狀態(tài)檢測,產(chǎn)品使用后對產(chǎn)品記錄數(shù)據(jù)進行下載、處理以及顯示等;操控檢測用于接收顯示光纖線纜實時傳回的探測數(shù)據(jù),及由特戰(zhàn)隊員遙控操作UUV;其他檢測指完成輸送平臺的氣密檢查、包裝運輸和存儲等。
2)布放與回收技術是特種作戰(zhàn)兵力部署的關鍵技術之一,決定著特戰(zhàn)隊員執(zhí)行秘密滲透任務的成功與否。作戰(zhàn)過程中要保障蛙人水下輸送平臺有效隱蔽布放,待完成任務后保障蛙人水下輸送平臺安全回收。目前主要由大型艦船吊放、特種潛艇甲板背負或直升機吊放等措施在海上進行快速布放回收。
3)模擬訓練技術包含輸送平臺模擬訓練技術、小型平臺釋放及回收模擬訓練技術和潛水服快速準確穿戴技術等。
4)使用保障技術包括: 為保障訓練正常進行,提供給輸送裝備的使用機動保障平臺及配套技術;為輸送平臺和攜具提高能源保障能力所涉及的能源保障技術;為提高特戰(zhàn)隊員出發(fā)前保存體力配備的如潛水服、頭盔、氧氣瓶及外骨骼架等專業(yè)設備而設計的專用運輸平臺技術。
2.3 武器技術
蛙人特種作戰(zhàn)時為打擊敵特戰(zhàn)隊員或破壞敵方設備設施時會用到打擊武器。打擊武器技術主要包含微型魚雷技術、自航榴彈技術及未來的新特武器(微型導彈+定向能武器)技術;自衛(wèi)技術包括水下次聲波技術、兩棲槍技術和匕首槍技術(如俄羅斯新研的水下超空泡子彈技術就是水下單兵自衛(wèi)武器的一個發(fā)展方向)。
2.4 試驗技術
試驗驗證是蛙人水下特種裝備研發(fā)的重要環(huán)節(jié)。試驗技術主要包括以下兩部分。
1)湖上干、濕式蛙人艙驗證技術。在研制階段,需要基于濕式、干式、水面/水下輸送平臺的技術特點開展干、濕式蛙人駕乘艙的試驗驗證研究,便于不斷優(yōu)化調整平臺的作戰(zhàn)使用效能。
2)海上整艇集成試驗技術。當針對各種艙室、能量、導航、通信和總體等技術的湖上驗證成功完成后,將各系統(tǒng)集成為功能完整的蛙人水下輸送平臺,再針對平臺進行海上整艇試驗驗證。
3 蛙人水下輸送平臺關鍵技術
蛙人水下輸送平臺綜合了潛艇、魚(水)雷、水下機器人等多種技術,是一個多學科交叉融合的高技術載體,具有專業(yè)性強、技術要求高等特點,其關鍵技術如圖14 所示。
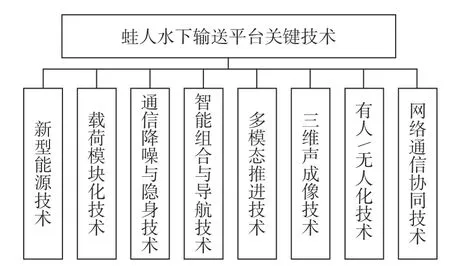
圖14 蛙人水下輸送平臺關鍵技術Fig.14 Key technologies of diver underwater delivery vehicle
3.1 新型能源技術
能源技術發(fā)展決定著蛙人水下輸送平臺的航程、航速及重復使用性。蛙人水下輸送平臺推進系統(tǒng)的關鍵技術是新型鋰離子電池與燃料電池技術[20]。
相較而言,鋰離子電池的循環(huán)使用壽命較長,約為傳統(tǒng)銀鋅電池的18 倍;鋰離子電池的空間體積小、成本低、效率高,具有明顯的優(yōu)勢[21]。隨著新技術的發(fā)展,鋰離子電池在電子控制和新型模塊化設計方面都有較大突破。鋰離子電池系統(tǒng)也朝著堅固耐用、超長壽命、充電快速、使用靈活、易于維修和安全性能高的方向發(fā)展。同時,鋰離子電池系統(tǒng)還支持高電壓和高電流場景下的能量傳輸,以及和太陽能電池板直連實現(xiàn)充電。美國海軍MK 8-1 型艇采用的就是鋰離子電池。
燃料電池是一種應用前景廣泛的新能源電池,其可以大大提升蛙人水下輸送平臺的續(xù)航能力,能量轉換效率高達80%以上,具有零排放,較好的自持力、隱蔽性及可靠性,可長期穩(wěn)定運行的特點。近年來,越來越多的軍事強國在探索如何將燃料電池技術應用于水下特戰(zhàn)裝備,例如: 美國海軍的深海探索船和無人潛艇的動力系統(tǒng)采用的是燃料電池;德國基于金屬儲氫技術也將燃料電池技術裝備于212A 級潛艇。
盡管現(xiàn)有的鋰離子電池和燃料電池可以大幅提升水下特戰(zhàn)裝備的動力性能,但各國仍在進一步探索不依賴空氣、水下續(xù)航時間長、支持多任務作戰(zhàn)使用的新一代蛙人輸送艇動力技術。近年來,有學者研發(fā)了一種質子交換膜燃料電池技術[22],這種燃料電池具有工作溫度低、噪聲低、能量轉換效率高的特點,是一種不依賴空氣推進的水下運載器的理想動力源。
3.2 載荷模塊化技術
平臺載荷采用模塊化組合方式的結構設計,便于設備的檢修和更換,可大幅提升系統(tǒng)的可維修性,同時還有利于系統(tǒng)的組合和擴展。在水下特戰(zhàn)裝備領域中,蛙人運載器和蛙人輸送艇,從元件到整艇的艙段都可進行模塊化設計。
平臺載荷模塊化設計主要依賴于三維設計、虛擬裝配技術以及生產(chǎn)工藝技術。盡管模塊集成技術與傳統(tǒng)的結構設計存在較大差異,但仍隨著理論研究和型號研制的深入開展而快速向前推進,并趨于完善。目前,美國、瑞典、德國等國的蛙人水下輸送平臺載荷模塊化技術已非常成熟,各國在提高模塊化集成技術和建造安裝工藝的同時,也聚焦于各類新型工藝技術,例如平臺總體合段技術、艇體結構變形精度控制技術、主干電纜連接技術和大型模塊進艙技術等。
未來蛙人水下輸送平臺將會如UUV 一樣朝著多功能模塊組合化方向發(fā)展: 一方面,實現(xiàn)平臺元件模塊化設計,將同一個子系統(tǒng)的電子元器件封裝在一個水密艙段內(nèi),方便平臺的拆裝檢修;另一方面,實現(xiàn)整艇分艙段模塊化設計,可隨時更換載人艙段和載器艙段,滿足不同作戰(zhàn)需求。
3.3 通信降噪與隱身技術
由于螺旋槳振動產(chǎn)生的噪聲、平臺搭載的通信技術、生命支持技術以及蛙人進出艙技術等都會影響水下特種作戰(zhàn)裝備的隱蔽性。通信降噪與隱身技術可保障蛙人水下輸送平臺將特戰(zhàn)隊員隱秘的輸送到目的地,完成秘密滲透任務[23]。
由于聲波在海水傳播過程中信號衰減極其嚴重,同時還受海水介質、鹽度、溫度、密度、深度及距離等影響,使得通信帶寬受限。一方面,海水不同深度處的密度不同,介質分布不均勻,容易使聲波在傳播過程中發(fā)生界面反射和散射,即多途效應;另一方面,如果使用高速通信技術,受信道帶寬較窄和信道多途效應的影響,信號在傳輸時會造成嚴重的碼間干擾,進而導致誤碼率急劇升高。這是目前水聲通信領域急需重點解決的技術難題[24]。目前,水聲通信研發(fā)方面的成果多集中在美、英、日、法等國。
除了對噪聲、通信、特戰(zhàn)隊員進出艙等技術進行進一步的深化研究外,未來蛙人輸送平臺所配備的各種專用設備,包括設備外形流線型、推進系統(tǒng)減振降噪、激光通信等技術都需不斷優(yōu)化。同時,平臺上還需配置電子對抗設備用于保障其隱蔽性。例如,意大利微型潛艇MG120/ER 上配置的一段小型六角形天線可以實時監(jiān)控偵測敵雷達信號電磁波,當發(fā)現(xiàn)有可疑電磁信號靠近時,會立即向質控中心發(fā)出警報,并采取隱蔽保護措施。
3.4 智能組合與導航技術
在復雜海洋環(huán)境下,為使蛙人水下輸送平臺在無任何通信環(huán)境下在水下長時間航行并順利完成任務,精確導航技術作用至關重要。
當今,美國和德國在精確導航技術領域具有優(yōu)勢。多數(shù)蛙人水下輸送平臺上使用的是組合導航系統(tǒng),將有各自數(shù)據(jù)特點的聲、光、電等多種傳感器裝備于平臺的偵察導航系統(tǒng)上,利用一根高探測性能的可伸縮桅桿來增強其環(huán)境感知能力,并配合多普勒探測儀使用,從而實現(xiàn)蛙人運載器的長航程高精度導航任務。偵察導航系統(tǒng)還可根據(jù)導航數(shù)據(jù)的質量在多普勒速度儀、GPS 定位系統(tǒng)和慣性導航系統(tǒng)之間自動切換,大大減小了系統(tǒng)定位誤差。
目前,蛙人水下輸送平臺的導航技術正朝著自主可靠、多功能化、低功耗化、智能化等方向發(fā)展。常見的導航技術有: 航位推算導航、慣性導航、聲學導航、視覺導航和物理場匹配導航等[25]。但單一導航技術在精度和可靠性方面往往不能滿足現(xiàn)代化軍事戰(zhàn)爭的需求,需要將多種導航技術適當組合,從而大幅提高系統(tǒng)的導航精度,也相對降低了成本和技術難度,同時有效提升系統(tǒng)的可靠性和容錯性。
3.5 多模態(tài)推進技術
多模態(tài)推進技術主要指用于蛙人水下輸送平臺的集成電機推進技術,將平臺所用推進電機與螺旋槳組合成一種全新概念的推進器,具有推進效率高、噪聲低、易于攜帶等特點,可以較好地滿足蛙人單兵作戰(zhàn)需求[3]。
目前這種推進技術主要采用單轉槳導管推進方式,包含轉子、定子和導流罩三部分。電機采用一種結構尺寸較小、質量較輕的錐形電機,安裝在平臺的外部,不需像傳統(tǒng)推進系統(tǒng)中的聯(lián)軸節(jié)傳動裝置的安裝模式,極大地節(jié)省了空間,大幅提高電機推進效率,降低電機振動噪聲、摩擦噪聲以及螺旋槳旋轉產(chǎn)生的流噪聲,是一種較為理想的安靜型推進裝置。目前,美、意等國的蛙人運載器和UUV 均裝備了該裝置,極大地降低了零部件維修量,提高了系統(tǒng)的可靠性、安全性和保障性。
多模態(tài)推進技術由于可提高推進功效,極大地降低推進噪聲,并可用于魚雷、潛艇等推進裝置上,將會被蛙人水下輸送平臺動力系統(tǒng)優(yōu)先采用。另外,由于水面/水下蛙人輸送艇采用了水面/水下雙模推進模式,所以水面/水下一體式集成推進技術和高速水面/水下的矢量推進技術也是今后發(fā)展的重點。
3.6 三維聲成像技術
當前,海洋軍事戰(zhàn)爭、海洋資源開發(fā)、海洋打撈作業(yè)和海洋勘探偵測的需求使得成像聲吶技術越來越受重視。盡管目前光學成像精確度較高,但其水下成像范圍較窄,一般的光學成像相機在清澈海水中僅能傳播10 m 遠,在較為渾濁的水域中幾米內(nèi)的目標都很難看清。因此三維聲成像技術是一種較為可靠的方式,其可對十幾米到幾百米的區(qū)域成像,且不受混濁水域下水文條件的影響。
蛙人水下輸送平臺在水下航行過程中,首先要求能在足夠遠的距離內(nèi)快速發(fā)現(xiàn)障礙物,確定水平方位距離,并在發(fā)現(xiàn)障礙物后準確判斷障礙物的垂直方位,以便制定合理的規(guī)避路線[26]。
根據(jù)工作方式,聲吶可分為掃描聲吶和多波束成像聲吶。掃描聲吶具有技術成熟、結構簡單、價格便宜,研制費用低,周期較短的優(yōu)點,國內(nèi)已有多款成熟產(chǎn)品;缺點是由于掃描時間很長,幾十米距離內(nèi)的障礙物都可能漏掃,增加了航行的危險性,另外,長掃描周期會導致前視避碰聲吶無法對水下運動物體進行準確判斷。多波束前視避碰聲吶的優(yōu)點是成像速度快,能較準確地分辨出水下運動或靜止的物體;缺點是系統(tǒng)復雜,國內(nèi)市場上無成熟產(chǎn)品,國外類似產(chǎn)品基本上為民用,且存在禁運的可能。
根據(jù)成像效果,成像聲吶可分為二維成像和三維成像聲吶2 種。二維成像聲吶通常顯示一定垂直夾角內(nèi)的水平聲切面圖,相對三維成像的速度更快,應用廣泛,既可以用于聲成像,也可以用于避碰。國外典型的二維成像聲吶有英國的Dolphin 6201(如圖15 所示)、BlueView P900(如圖16 所示)以及加拿大IMAGENEX 公司的Delta T 837(如圖17所示)等。三維成像聲吶系統(tǒng)構成復雜,體積相對較大,一般用于水下打撈需要對水下物體進行仔細辨認的場合。
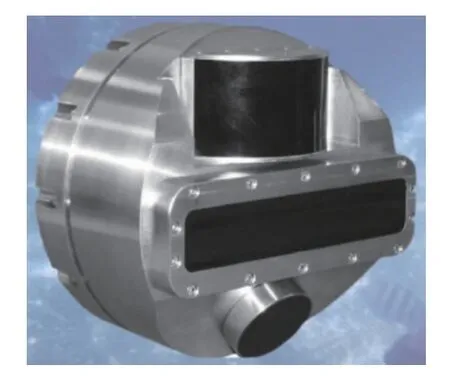
圖15 Dolphin 6201 二維避碰聲吶Fig.15 2D-collision avoidance sonar Dolphin 6201

圖16 BlueView P900 二維成像聲吶Fig.16 2D-imaging sonar BlueView P900
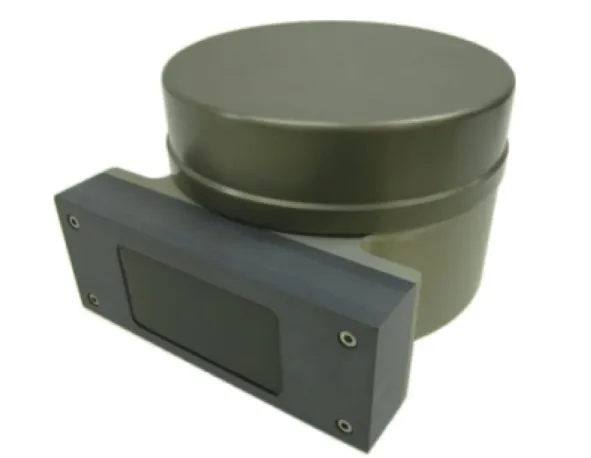
圖17 Delta T 837 二維成像聲吶Fig.17 2D-Imaging sonar Delta T 837
根據(jù)用途劃分,聲吶可分為成像聲吶及前視避碰聲吶。國外典型的前視避碰聲吶如英國專為UUV導航設計的Dolphin 6201[27],該聲吶具備目標識別及避障功能。典型的成像聲吶如IMAGENEX 的Delta T 837[28],該聲吶僅對水下前方的聲反射回波按能量大小進行偽彩色聲成像,不具備目標自動識別及避障功能。
1)聲透鏡成像聲吶
聲透鏡波束形成技術已經(jīng)由最初的理論研究和試驗研究逐步走向實用階段。國外試驗型聲透鏡成像聲吶主要有LIMIS 手持型聲吶、GLACIS 型聲吶、ABIS 型聲吶。丹麥MacArtney 公司生產(chǎn)的透鏡聲吶DIDSON(如圖18 所示)己投入市場[29]。

圖18 DIDSON 成像聲吶Fig.18 Imaging sonar(DIDSON)
2)二維回波成像聲吶
美國Reson 公司開發(fā)的新一代數(shù)字聲吶SeaBat 8125 屬于二維回波成像聲吶。這種產(chǎn)品采用一維線陣,通過機械平移操作得到二維面陣,最后再掃描每個位置的二維數(shù)據(jù)進而合成三維圖像[30],這種方式雖較為簡單、硬件復雜度低,但合成精度也較低。
3)三維回波成像聲吶
三維避碰聲吶系統(tǒng)構成復雜,體積相對較大,為保證成像質量,圖像均需多次疊加處理,成像處理速度較慢,主要用于水下打撈等需對水下物體進行仔細辨認的場合。典型代表有BlueView、Echoscope 等產(chǎn)品。澳大利亞開發(fā)的水雷成像(acoustic mine imaging,AMI)聲吶屬于三維回波成像聲吶[31],是一種主動甚高頻三維成像聲吶,可大幅提升澳大利亞海軍在沿岸混濁水域的水雷戰(zhàn)能力。AMI 是為“胡昂級”沿海獵雷艇設計的,按計劃,工程的第2 階段是在“雙鷹”遙控滅雷具上裝備系統(tǒng)樣機。
目前,許多軍事強國均高度關注高分辨率三維成像聲吶技術的發(fā)展與研究。縱觀當前三維聲成像技術的發(fā)展,主要集中在以下3 個方向: 基于聲透鏡技術實時獲取動態(tài)視頻圖像;以一維線陣為基礎獲取目標二維圖像,然后基于圖像擬合技術得到三維立體圖像;基于二維基陣實時獲取空間目標的三維圖像。
3.7 平臺有人/無人化技術
平臺有人/無人化技術是將蛙人水下輸送平臺或大型UUV 通過模塊化艙段技術更替,使其成為有人與無人共同使用的特種作戰(zhàn)輸送平臺,為隨行特種作戰(zhàn)任務提供物資及人員的保障支持。
2016 年,泰勒斯公司在法國巴黎海軍裝備會上展示了一款具有良好隱身性和多任務能力的自主水面/水下系統(tǒng)(autonomous underwater and surface system,AUSS)UUV,其外形形似魚雷,如圖19所示。該系統(tǒng)可執(zhí)行反潛戰(zhàn)、水雷戰(zhàn)以及一些商用水下任務。人操時設計航速17 kn,能在距目標10 m 內(nèi)實現(xiàn)緊急懸停避碰;無人時續(xù)航力2 周,可長時間在水下執(zhí)行情報監(jiān)視和偵察任務;伸出水面的桅桿配有多種傳感器,可與潛艇、水面艇或岸基布放的其他AUSS 進行通信;可搭載多種有效載荷,收集水聲、圖像和電子數(shù)據(jù),通過衛(wèi)星進行數(shù)據(jù)回傳;自主控制軟件作為其關鍵系統(tǒng),用于執(zhí)行自主安全工作任務[32]。

圖19 法國泰勒斯公司的AUSS UUVFig.19 AUSS UUV exhibited by French Thales
俄羅斯的“影子”水面/水下無人艇如圖20 所示。該艇為三體船型,目前己完成設計研究和理論計算驗證。其主要任務是深海海域無人監(jiān)控、世界海域生態(tài)和水文信息收集等。
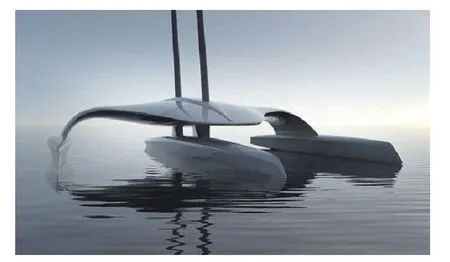
圖20 俄羅斯“影子”水面/水下無人艇Fig.20 Underwater and surface amphibious unmanned boat Shadow(Russia)
美海軍研發(fā)的“PROTUES”蛙人輸送艇原型機采用了艙段模塊化設計技術,將UUV 的高新技術運用于特種作戰(zhàn)裝備,實現(xiàn)了UUV 向蛙人水下輸送平臺的轉化。從2018 年舉辦的海上防務展覽會上展出的該艇模型可以獲知,該艇為圓柱回轉體艇型,其主要任務是將特戰(zhàn)隊員進行遠距離投送,增加了短期內(nèi)將無人輸送平臺改造成有人輸送平臺的可能性,節(jié)約了經(jīng)費投入。
平臺智能化已成為蛙人水下輸送平臺未來發(fā)展趨勢之一。平臺智能化后,可對獲取信息進行綜合分析處理,實現(xiàn)自動控制和導航的最優(yōu)化;可迅速對突發(fā)狀況進行響應,減少人工操作,提高任務完成效率;改變了原來蛙人水下輸送平臺僅輸送蛙人的單一功能。近年來,隨著應對多模式威脅的需求和技術的發(fā)展,逐漸出現(xiàn)了由水下單一模式輸送向水面/水下復合輸送、由輸送型向輸送與攻擊結合型發(fā)展、由有人作戰(zhàn)平臺向有人/無人融合的發(fā)展趨勢,因此蛙人輸送平臺在承擔特種作戰(zhàn)任務的同時,應利用水下無人系統(tǒng)已有研究成果來完成水下救援、水下施工等多樣化任務功能。
4 蛙人水下輸送平臺技術發(fā)展歷程與趨勢
4.1 發(fā)展歷程
表2 總結了國外蛙人水下輸送平臺技術發(fā)展路線。蛙人水下輸送平臺經(jīng)歷了從無到有、從簡單騎行在魚雷上運送炸藥到依靠空中、水面艦及潛艇等大型母平臺投送進行特種作戰(zhàn)的裝備技術發(fā)展歷程。由表中可看出,蛙人水下輸送平臺技術發(fā)展主要經(jīng)歷了以下幾個重要階段。

表2 蛙人水下輸送平臺技術發(fā)展路線Table 2 Technology development route of diver underwater delivery vehicles
初始階段: 一戰(zhàn)到二戰(zhàn)階段(1776~1939 年),是蛙人輸送平臺的初期構想和技術需求不斷提出及實踐階段,提出了很多當今仍在采用的技術。
發(fā)展階段: 二戰(zhàn)至冷戰(zhàn)階段(1939~2008 年),是蛙人輸送平臺各項技術不斷突破的階段,研發(fā)出眾多有代表意義的典型裝備,完成了許多反恐、營救、破壞和偷襲的任務,尤其是越南蛙人對美軍大型艦艇的重創(chuàng)引起了美軍的高度重視,秘密研發(fā)了ASDS、MK 8 等著名蛙人運載器。
高速發(fā)展階段: 2009 年至今,隨著通信技術、導航技術、自主技術、微小型無人化技術及模塊化技術的不斷成熟,一直處于停頓的裝備技術迎來了革命性創(chuàng)新發(fā)展;隨著高密度能源技術瓶頸的突破,蛙人水下輸送平臺的航行距離從20 n mile躍至海上作戰(zhàn)半徑200 n mile 以上,航速從原來的幾節(jié)躍至幾十節(jié);隨著通信導航與定位技術的發(fā)展,原來的“敢死隊”已變成成績卓著的特戰(zhàn)隊。
蛙人輸送平臺發(fā)展至今,出現(xiàn)了濕式、干式、水面/水下蛙人輸送平臺及配套的通信導航與武器裝備。不同蛙人輸送平臺級別和作戰(zhàn)樣式構成了以平臺為主體的獨立的特種水下裝備技術體系。
濕式蛙人輸送平臺質量由幾十千克到5 t 左右,主要以蛙人助推器、蛙人運載器和蛙人輸送艇系列為主,借用水下航行器的外形設計技術,外形結構多為圓柱體或變結構體,采用電動力推進。由于水下航行速度較低并處于濕式狀態(tài),特戰(zhàn)隊員存在較大精神壓力,因此航行距離不可太遠,水下浸泡時間也不能太長。
干式蛙人輸送艇由于配有干艙段或干濕轉換艙,體積較大,通常由小型潛艇改裝,各種通信導航設備齊全,保障設施完善,可長時間在水下行進作戰(zhàn),成為未來蛙人水下輸送平臺的發(fā)展方向。平臺采用各種先進技術來保障蛙人遂行任務的任務鏈、時間鏈及信息鏈的閉合,具有較好的隱蔽性。
水面/水下蛙人輸送艇是目前各國都在積極發(fā)展的一種蛙人輸送平臺,其水下部分采用了水面快艇的“深V”結構,水面部分則采用可降低雷達探測面的隱身性多棱反射面結構,可實現(xiàn)水下隱蔽、水面高速的航渡模式,擴展了作戰(zhàn)距離,縮短了到達作戰(zhàn)域的時間,并能節(jié)約特戰(zhàn)隊員體能,提高作戰(zhàn)效能。
未來不同的蛙人輸送平臺可采用通用載體、開放式結構和模塊化載荷方式設計,以方便實現(xiàn)系統(tǒng)重構和功能轉換。在蛙人輸送平臺發(fā)展的高級階段,應開發(fā)集多功能于一體的,具有有人/無人特點的智能化特種作戰(zhàn)平臺。
4.2 發(fā)展趨勢
4.2.1 優(yōu)化的外形結構設計技術
大多數(shù)濕式蛙人輸送艇采用魚雷或潛艇外形,如意大利CE4F 和美國MK 8 系列等;水面/水下蛙人輸送艇下半部多采用水面高速滑行艇的“深V”艇型,水上為封閉順滑的流線型外形。為控制排水量,各國干式蛙人輸送平臺均采取了總體合理布置、系統(tǒng)集成優(yōu)化、設備小型化等措施,在保證必需的干式轉換、偵察探測、生命支持等功能的基礎上,對其他系統(tǒng)進行簡化和集成,如采用大分艙布置,降低儲備浮力,減少甚至取消升降裝置,取消部分功能的應急備份設計等。
4.2.2 高比能混合動力推進技術
國外濕式蛙人輸送艇普遍采用電機+減速器+螺旋槳推進技術。水面/水下蛙人輸送艇采用柴電混合動力技術,水面航行時采用柴油機+噴水推進器形式,水下潛航時采用電動力+導管螺旋槳形式,半潛航行時電動力、柴油動力均可使用。動力電池主要采用能量密度和功率密度較高的鋰電池[33];另外,還通過矢量式輔助推進裝置實現(xiàn)與母艇對接過程中的高精度動力定位和姿態(tài)控制。
4.2.3 蛙人快速出入轉換艙技術
為實現(xiàn)蛙人快速出艙,意大利設計的button 5.60 干式蛙人輸送艇設置了鎖入/鎖出干濕轉換艙,均衡水艙可將海水注入到干式艙體中,實現(xiàn)進出過程的壓力轉換和載荷均衡,完成干濕轉換,以保證多人同時快速出入蛙人輸送艇。
4.2.4 母平臺靈活立體投送接口技術
母平臺靈活立體投送接口技術目前主要有干甲板掩蔽艙方式和直接背負方式。美國的弗吉尼亞級核潛艇采用了干甲板掩蔽艙方式,這種方式技術上易于實現(xiàn),蛙人輸送艇釋放回收率高,但空間和質量轉換代價較大,適合排水量較大的核潛艇。直接背負方式空間和質量轉換代價較小,常規(guī)潛艇及在研小型核潛艇都基本具備搭載能力,其中蛙人輸送艇與母艇水下對接技術是未來研究的關鍵技術。
4.2.5 智能化操控導航技術
水下環(huán)境信息透明度低,導致水下操縱和裝備應用存在困難,純粹依靠人工進行判斷和反應不符合現(xiàn)代戰(zhàn)爭快速、精確的需求,因此智能化是未來的發(fā)展趨勢之一。蛙人輸送艇智能化后可對獲取信息進行綜合分析處理、實現(xiàn)自動控制和導航的最優(yōu)化,并可迅速對突發(fā)狀況進行響應,減少人工操作,提高任務完成效率。
4.2.6 模塊化技術
現(xiàn)代海戰(zhàn)是一種全方位的戰(zhàn)爭,不同類型的任務對蛙人水下隱蔽機動戰(zhàn)術系統(tǒng)提出了不同要求,使其朝多樣化方向發(fā)展。同時,為適應不同任務需要、提高任務完成質量,在專業(yè)化上要求裝備功能最大程度地適用于特定任務的要求。模塊化設計完美地結合了專業(yè)化和多樣化,最大限度地利用載體資源,根據(jù)任務需求更換相應的功能模塊或特定艙段,或進行簡單的適應性改造,便可一艇多用,滿足不同任務需求,實現(xiàn)了效費比的最大化。
4.2.7 群組化/網(wǎng)絡化技術
隨著特種作戰(zhàn)任務的復雜性越來越高,往往需要不同類型作戰(zhàn)單元之間相互配合才能完成任務,群組化作戰(zhàn)模式可以大大提高任務完成概率。群組化不是簡單的數(shù)量疊加,而是不同特性、不同功能的裝備之間協(xié)同作戰(zhàn),或是由相同作戰(zhàn)人員分階段利用不同功能的作戰(zhàn)平臺,依靠智能傳感器的融合和配置技術以及通過網(wǎng)絡建立的大范圍通信系統(tǒng),建立作戰(zhàn)小組之間的通信與磋商機理,完成群體行為控制、監(jiān)測與管理。未來的網(wǎng)絡化,則是將水下作戰(zhàn)平臺組成的“小網(wǎng)絡”,納入到全方位作戰(zhàn)體系的“大網(wǎng)絡”之中,由更高級別的作戰(zhàn)網(wǎng)絡統(tǒng)籌指揮水下作戰(zhàn)平臺網(wǎng)絡,使特種作戰(zhàn)在最大限度上發(fā)揮其戰(zhàn)斗威力。
5 結束語
利用水上/水下空間進行非對稱特種作戰(zhàn)將是未來海戰(zhàn)的新型模式。特別是對于擁有完整反介入和區(qū)域拒止能力的國家,特戰(zhàn)隊員進行瀕海秘密滲透、偵察監(jiān)視、奪島突襲、港口破襲、反恐救援等任務將更加困難。因此,擁有更遠航程,更持久續(xù)航力、更好水下隱蔽性的水下輸送裝備成為各國研發(fā)的重點。文中對現(xiàn)有國外水下蛙人輸送平臺的發(fā)展歷程、研究現(xiàn)狀、發(fā)展趨勢及關鍵技術進行了全方位深入研究,可知基于未來作戰(zhàn)網(wǎng)絡化、模塊化、智能化及群組化的技術發(fā)展趨勢,將蛙人特戰(zhàn)裝備納入作戰(zhàn)體系,將最大限度地發(fā)揮特種作戰(zhàn)平臺的作戰(zhàn)能力。可以預見,根據(jù)各國自身軍事需求及長期積累的新技術發(fā)展成果,未來將有更多性能高且穩(wěn)定、操作性強且更可控的水下先進輸送裝備不斷涌現(xiàn)。