基于四元陣的超短基線便攜式定位設備定向算法
2023-01-27 05:45:58郭曉明
水下無人系統學報 2022年6期
郭曉明,田 甜
(中國電子科技集團公司 第三研究所,北京,100015)
0 引言
各種水下搜救打撈、警用潛水員訓練和實操以及潛水愛好者培訓等應用場景均涉及潛水員水下協同作業。由于水下能見度差,視野范圍小,方位感差,且電磁波衰減嚴重,傳統的陸上定位設備在水下無法使用,因此亟需一種可以解決潛水員水下協同作業時獲知相互位置信息的便攜式定位設備。
鑒于聲波在水下的良好傳播特性,目前水下定位以水聲定位技術為主要手段,包括長基線定位技術、短基線定位技術和超短基線定位技術[1]。其中長基線和短基線定位系統都需要安裝固定的基陣,且基陣尺寸較大。而超短基線定位系統基陣尺度較小,安裝方便,可用于艦船和無人水下航行器等的水下定位。
超短基線定位技術發展比較成熟,國內外已經有大量的關于其陣型設計、安裝校準、發射信號形式和定位精度提升等方面的研究以及相關成熟產品[2-9]。例如,針對潛水員水下定位主要包括使用岸基主被動聲吶對未知入侵潛水員進行定位跟蹤的技術及產品研究[10-12],以及針對潛水員水下協同作業時相互位置信息獲取的應用研究[13-14],而用于潛水員水下協同作業相互位置信息獲取的技術研究基本處于未公開狀態。
文中針對潛水員水下協同作業相互位置信息獲取應用需求,設計了適用于潛水員水下作業便攜使用的、基于微型超短基線正四面體接收基陣定位測向技術方案[15]。首先使用互譜法計算不同陣元間的信號延時,以較小的計算量獲得較高的測量方位精度,然后使用和水聲數據精準同步的接收基陣姿態數據對互譜法測量方位進行修正,減少潛水員水下作業時由于姿態變化不平穩產生的目標測量方位的影響。最后對該技術方案的測向性能,特別是因多徑信道、多陣元相位偏差以及作業過程姿態變化不平穩等因素對測量方位精度的影響展開仿真分析。
1 方案概述
超短基線水聲定位主要是通過水聲信號測量聲源與定位基陣間的相對距離和方位進行定位。針對潛水員水下作業相互位置信息獲取應用,水下便攜定位設備包括聲源單元和定位顯示單元兩部分。聲源單元使用不同的編碼區分不同的潛水員;定位顯示單元將基陣接收的水聲信號轉換為電信號,放大調理后轉換為數字信號,在數字信號處理單元開展信號檢測及聲源方位估計計算,并顯示測量方位結果。
1.1 超短基線正四面體接收基陣測向原理

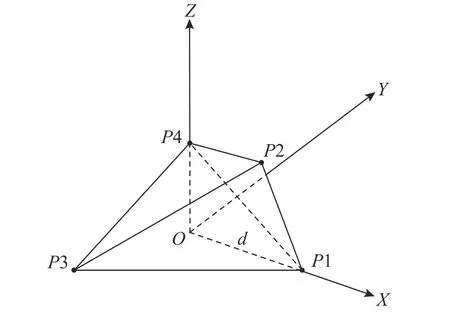
圖1 正四面體接收基陣坐標系示意圖Fig.1 Schematic diagram of coordinate system of regular tetrahedral receiving array
為防止發生相位模糊,陣元間距R與信號波長λ應滿足關系:R<λ/2。
當目標聲源到基陣的距離遠大于陣元間距R時,可把基陣接收到的信號近似看作平面波。
假設目標聲源N到原點的距離為L,其在XOY平面的投影為N′。目標聲源與原點之間連線在XOY平面的投影如圖2 中虛線所示。目標聲源信號從球面角θ=(α,β)入射,其中: α為目標聲源與原點連線在XOY平面的投影和X軸的夾角;β為目標聲源與原點連線和XOY平面的夾角,因此定義信號傳播方向的單位向量為
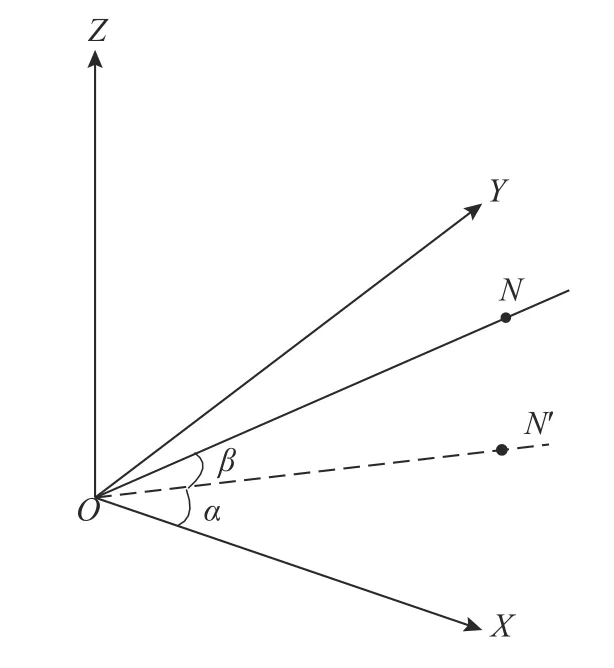
圖2 目標聲源位置示意圖Fig.2 Schematic diagram of target source location

式中,負號表示信號傳播方向與坐標軸方向相反。則聲源位置為[Lcosαcosβ,Lsinαcosβ,Lsinβ]。
由于目標聲源相對各個陣元距離不同,信號經過不同傳播時間到達各陣元,這里假設目標聲源N與P1,P2,P3,P4 陣元的距離為P1N,P2N,P3N和P4N,則
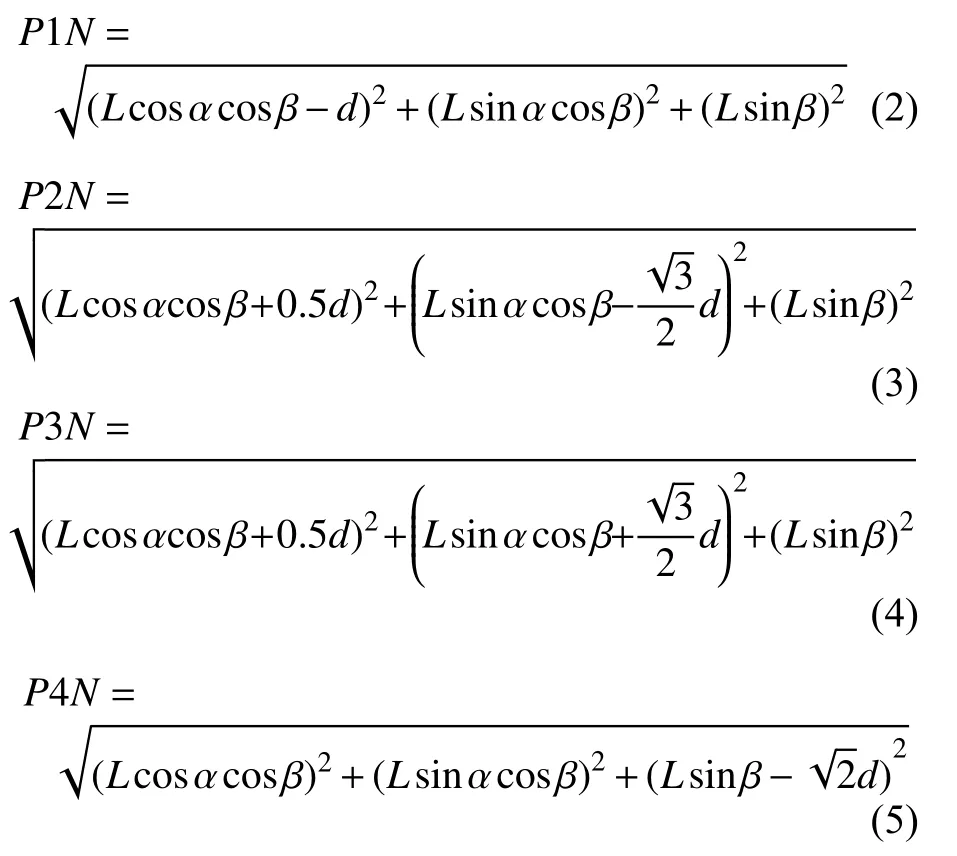
假設信號到達P2,P3 和P4 陣元相對于P1 陣元的時間延遲為 τ12,τ13和 τ14,則
式中,c為水中聲速。由此可得出時延的計算公式
這里d相對L可以忽略,故d2忽略。
由上述公式導出目標方位角計算公式

所以得出方位角計算公式

1.2 便攜式超短基線定位測向算法實現
超短基線正四面體測向原理是通過不同陣元之間的時延差計算聲源的相對方位。從時域進行時延差計算需要相當高的采樣率才能獲得較高的定位精度,故采用頻域互譜法進行時延差計算。
設2 個陣元接收到的信號分別為x(t)和y(t),其中
式中:A1和A2為信號幅度;ω為信號角頻率;τ為相對時延。
令X(f)和Y(f)分別為x(t)和y(t)的傅里葉變換,則
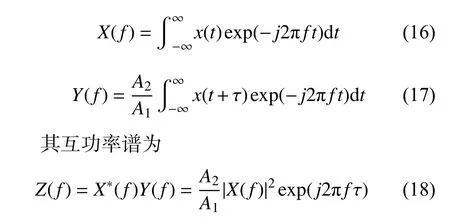
可見時延信息包含在互功率譜的相位信息中,此相位為
從式(16)~式(18)可以得出如下結論:
1)互功率譜計算的時延差不受采樣率高低影響,因此對于高信噪比信號互譜法可以較為精準地估計時延差,從而得到較高精度的定向結果。因此,使用互譜法可以以較低的采樣率、較小的計算量獲取較高的定位精度;
2)互功率譜計算時延不受2 個通道信號幅度大小差異影響,即對于高信噪比情況,不同通道信號的幅度一致性不會影響定位結果。
雖然接收基陣尺寸很小,但是陣元直徑相比陣元間距只有約1/10,因此雖然陣元之間會存在信號遮擋,但是因陣元之間的遮擋而出現某個陣元接收到的信號在帶內屬于低信噪比的情況并不嚴重。而互譜法計算結果和各陣元接收的信號幅度一致性無關。故因陣元之間相互遮擋導致測向誤差的概率不大。對于因陣元遮擋導致某個陣元接收到的信號過小的小概率情況,可以采用正四面體立體陣的其他3 個陣元進行聲源目標方位計算。
1.3 聲源方位姿態修正
潛水員水下作業時,其身體相對大地處于運動狀態,且身體各部位也處于相互運動狀態,導致便攜式定位設備姿態變化不平穩,測量方位的基準坐標系不斷變化。使用互譜法獲得的方位測量值是針對有效數據采集時刻基陣所處坐標系,該坐標系處于不斷變化中。從使用者的使用感受來看,希望顯示方位角是平穩的,即顯示方位角的基準坐標系是平穩的。從人的生理習慣出發,一般認為顯示的測量結果是以大地坐標系為參考的,故需要在互譜法獲得的方位測量值基礎上進行坐標系變換,得到顯示方位值。
坐標系變換算法模型以基陣陣元P1,P2 和P3 所在平面為基陣坐標系的水平面,XYZ對應大地坐標系(XOY為該坐標系的水平面),X′Y′Z′對應接收基陣坐標系(X′O′Y′為該坐標系的水平面)[16]。
假設接收基陣坐標系X′Y′Z′相對大地坐標系XYZ的橫滾角為θpitch,俯仰角為θroll,方位角為θyaw。那么同一目標從接收基陣坐標系轉換到大地坐標系的旋轉矩陣為RxRyRz,其中

同一目標聲源的方位、橫滾和俯仰信息從接收基陣坐標系轉換到大地坐標系的計算公式為
式中: 下標w表示測量方位角坐標系;下標c表示大地坐標系。由目標聲源在基陣坐標系的距離、方位角、俯仰角和橫滾角測量信息可以換算得到目標聲源在大地坐標系的距離和方位顯示信息。
由于潛水員姿態處于不斷變化過程中,且變化不平穩,因此必須保證用于姿態修正計算的橫滾角和俯仰角以及用于方位計算采集的基陣陣元數據是精準同步的。需評估基陣陣元數據采集到互譜法方位計算結束之間的時延差,使用該時延差之前的姿態信息橫滾角和俯仰角進行姿態修正計算。
2 仿真驗證
為驗證水下超短基線正四面體接收基陣測向原理及算法理論的可行性,設定仿真參數如下: 基陣陣元間距3 cm,忽略各陣元之間的相位差;信號帶寬1 kHz;中心頻率20 kHz;脈寬0.02 s;采樣率75 kHz;聲速取值1 500 m/s。目標聲源和基陣間的距離隨機設定,信道噪聲使用高斯白噪聲。在此基礎上,目標聲源相對基陣的實際方位均勻覆蓋360°,從0 開始每5°一個步進間隔進行掃描仿真,每次仿真覆蓋72 個實際方位點。
分別設定信噪比(signal-to-noise ratio,SNR)為-3,0,3,6 和10 dB 進行多組仿真,當SNR 低于某個門限時,測向誤差增大。圖3 是SNR 為6 dB 的仿真結果,其中橫坐標代表仿真步進點順序,縱坐標代表測量值和實際值之間的偏差,測量方位和實際方位之間的角度偏差小于1°。仿真結果得出,在各通道信號SNR 大于一定門限的情況下,該水下超短基線正四面體接收基陣測向精度較高。
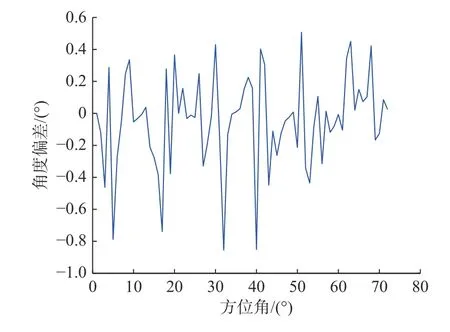
圖3 SNR=6 dB 時測量方位和實際方位偏差Fig.3 Deviation between measuring azimuth and actual azimuth at SNR=6 dB
3 影響因素分析
前文的仿真是基于較為理想的水文環境,信道模型僅添加了高斯白噪聲。然而實際的工程應用中存在諸多影響測向精度的因素,如多徑等復雜水聲信道特性、加工工藝導致的同一接收基陣不同陣元之間存在的常規手段難以校準的相位差、潛水員水下作業姿態動態變化不平穩引起測量方位和顯示方位的不一致等。在仿真模型基礎上分別加入上述影響因素,仿真驗證四元超短基線測向算法在潛水員水下作業場景中的應用可行性。
3.1 多徑復雜水聲信道特性
實際水聲信道非常復雜,特別是淺海環境,除了各種海洋環境噪聲和艦船噪聲的影響外,還存在強烈的多徑效應,這些特性都會影響測向精度。
算法關注的頻帶相對有效采集頻帶可以看作窄帶,因此只要發射聲源級和接收靈敏度足夠高,即將陣元收到的水聲信號看作高信噪比信號。圖4仿真基于直達波到達后延時約0.002 s 后,有1 條信號強度為直達信號0.5 倍的水底反射多徑信號到達,延時約0.005 s 后有1 條信號強度為直達信號0.3 倍的水面反射多徑信號到達的多徑模型。由仿真結果可以看到,所有多徑信號中,強度最大的海底、海面一次反射多徑對測向精度影響不大,實際使用可以忽略。
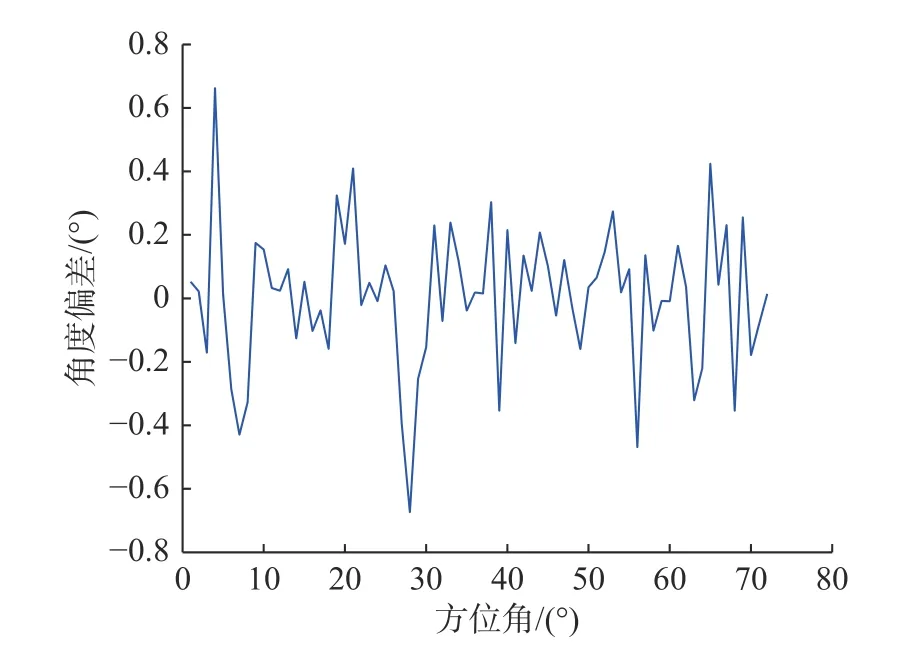
圖4 多徑下的測量方位和實際方位偏差Fig.4 Deviation between measuring azimuth and actual azimuth under multipath
3.2 接收基陣各陣元相位一致性
由于現有機加工工藝的限制,同一接收基陣不同陣元之間存在相位差。由于接收基陣陣元間距小,常規的相位校準方法不可用。
換能器使用陶瓷材料,同一基陣的不同陣元是從同一陶瓷管切割而來,且從四元陣每個陣元的測量阻抗特性曲線來看,不同陣元之間的阻抗特性差異不大,因此同一基陣不同陣元之間相位差不會太大(小于10°)。
仿真模型以陣元P1 為基準,陣元P2,P3,P4 和P1 之間的相位差在-10°~10°之間選取隨機數進行仿真。圖5 是測量方位和實際方位之間的偏差。由于潛水員水下作業自身狀態不斷變化,對協同作業潛水員相對方位的分辨率不高。從仿真結果可知,基陣各陣元間的相位差可降低測向精度,但整體的測向趨勢和實際方位變化趨勢保持一致。故各陣元間相位差引起的測向誤差不會影響實際應用。
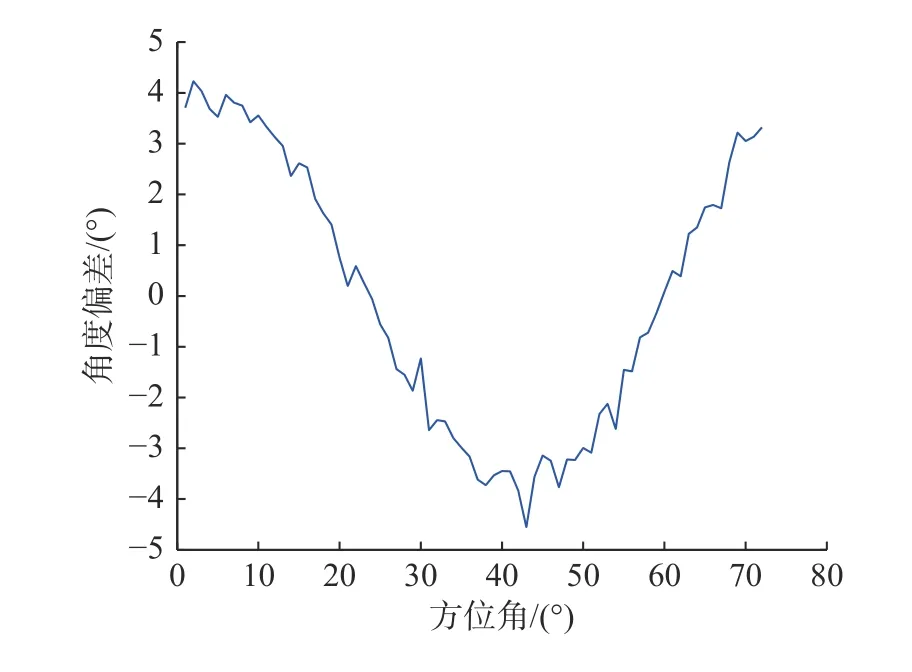
圖5 相位差在-10°~10°間的測量方位和實際方位偏差Fig.5 Measurement azimuth and actual azimuth deviation with phase difference between -10° and 10°
3.3 水下作業姿態動態變化不平穩
對不同接收基陣姿態(橫滾角、俯仰角)下測量方位和實際方位的偏差進行仿真,獲得測量方位和實際方位的差異趨勢。之后使用1.3 節坐標系變換模型進行聲源方位姿態修正,獲得姿態修正后的顯示方位和實際方位的差異。
分別取接收基陣坐標系X′Y′Z′相對大地坐標系XYZ的橫滾角和俯仰角為-30°~30°之間的隨機數,目標距離在10~500 m 之間隨機確定,目標方位在360°內隨機確定。按照上述方法選擇100 組參數進行仿真。圖6 是沒有添加姿態修正的仿真結果,橫坐標表示仿真序列,縱坐標表示測量方位和實際方位偏差。從仿真結果可以看出,由于潛水員水下作業時姿態變化不平穩而導致的測量目標聲源方位和實際目標方位,即顯示目標方位之間存在較大的偏差,該偏差會導致使用者主觀判定的目標位置和實際目標位置之間存在較大偏差。圖7是添加姿態修正后的仿真結果,從仿真結果可以看出,經過姿態修正后的測量方位和實際方位偏差很小。

圖6 坐標系變換導致目標方位偏差Fig.6 Target azimuth deviation caused by coordinate system transformation
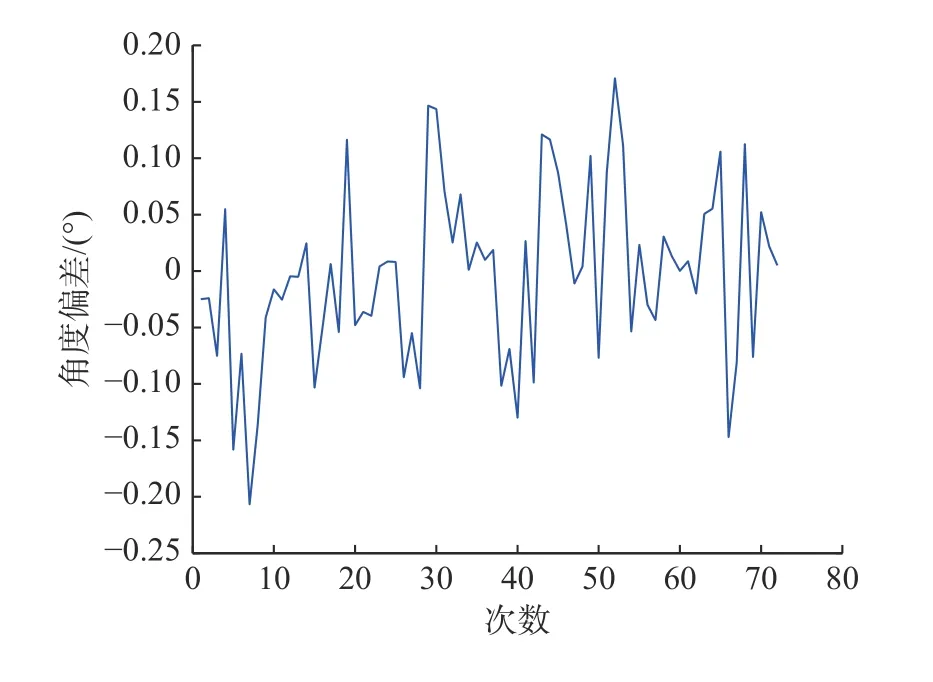
圖7 姿態補償校準后的偏差Fig.7 Deviation after attitude compensation calibration
4 結束語
所提四元超短基線定向算法使用微型超短基線基陣,能以較低的采樣率和較小的計算量獲得較高的定位精度,滿足水下便攜式設備體積小、功耗低的要求。該算法適用于信號帶內信噪比較高的情況。主要影響定位精度的因素包括多徑復雜水聲信道特性的影響、潛水員水下作業姿態變化不平穩,以及接收基陣不同陣元之間存在相位差等。因陣元間距小導致不同陣元之間相位差難以使用常規校準手段進行修正,因此實際使用會帶來一定的定向誤差(小于5°)。潛水員水下作業很難保持靜止狀態,對5°方向誤差不敏感,因此所提四元陣定向算法可以用于解決潛水員水下協同作業獲取相互位置信息應用時目標聲源定向問題。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00