面向用戶最大覆蓋的多空中基站布局方法
2023-02-01 03:18:26胡焰智章鋒斌陳啟航
系統工程與電子技術 2023年2期
關鍵詞:優化
胡焰智, 章鋒斌, 田 田, 陳啟航
(陸軍工程大學通信士官學校應急通信重慶市重點實驗室, 重慶 400035)
0 引 言
當前無人機技術不斷成熟和普及,以無人機為平臺的空中基站(unmanned aerial vehicle base station, UAV-BS)組網逐步得到應用,如4G和5G系統UAV-BS[1-4]。UAV-BS一般采用視距通信頻段,在對地面終端進行通信中繼組網時,較之地面基站在通信覆蓋范圍上具有明顯優勢,同時具備快速移動能力,部署較為靈活,特別是在應急通信領域形成了一定應用需求[5]。利用UAV-BS可以在發生自然災害和公共安全事件時,迅速恢復網絡通信和構建應急通信。2020年9月中國“翼龍”完成大型無人機應急通信保障演練,無人機上搭載公網移動通信基站、專網寬帶自組網設備等設備,驗證了大型無人機的高可靠性和復雜環境適應能力,尤其是作為空中無人通信平臺在極端情況下支撐通信保障任務的能力,為第一時間開展應急救援提供了全新解決方案。在UAV-BS組網中,規劃基站位置布局是一個首要問題。一方面,基站節點位置對通信覆蓋范圍影響較大,有時臨時應急組網情況下,需要依托有限數量UAV-BS實現最大通信覆蓋;另一方面UAV-BS攜帶能源有限[6],空中基站組網通信必須合理布局以降低發射功率、優化基站節點功耗。因此,UAV-BS組網中基站節點定位一直是研究熱點[7-11]。
在單個UAV-BS定位研究方面。Al-Hourania等[12]針對低空平臺(low altitude platforms, LAP)通信基站的部署高度進行了研究,以獲得最大覆蓋范圍為目標分析LAP基站最優高度,并且給出了LAP基站與地面終端之間發生視線(line-of-sight, LoS)和非視線(non-line-of-sight, NLoS)傳輸概率的近似解析表達式,為后續相關研究提供了基礎。Bor-Yaliniz等[13]對空中基站3D位置部署問題進行了分析,目的是最大化網絡收益,該網絡收益用空中基站覆蓋的用戶數來表征,將該問題建模為二次約束混合整數非線性優化問題,并提供了一種有效的數值解。Alzenadm等[14]提出一種基站位置優化算法,實現了最小化發射功率和最大化覆蓋用戶數量在垂直和水平方向上解耦UAV-BS部署問題,同時將水平方向UAV-BS位置建模為圓覆蓋問題,通過仿真驗證了方法性能。接著,該團隊[15]以接收端信噪比表征不同用戶服務質量,提出一種UAV-BS的3D定位方法,能夠覆蓋最多的用戶數且滿足其不同的服務質量要求。該文獻將定位問題建模為多圓定位問題,利用閉區上一維參數的窮盡搜索提出一種最優化定位算法,并設計了一種性能接近窮盡搜索的低復雜度算法。Sun等[16]將無人機空中基站作為地面宏基站熱點區域覆蓋的輔助接入節點,將空中基站定位與用戶關聯優化問題進行形式化分析,從而提高容量和頻譜效率。Wang等[17]提出單個無人空中基站節能定位算法,使基站能夠以最小發射功率為地面用戶提供通信服務,該算法中通過將基站在水平和垂直維度布局進行分解來獲得最優基站定位,并對算法在熱點和非熱點場景進行了性能仿真評估。
在多空中基站布局及定位問題研究方面。Wang等[18]提出了一種衛星-高空平臺(high altitude platform, HAP)-地面網絡系統的組網架構,其中HAP為空中基站中繼節點,針對組網布局提出多目標優化模型。Sharma等[19]采用優先級和熵方法,為UAV中繼節點精確高效定位提供一種智能解決方案,提高組網覆蓋范圍和容量。Helmy等[20]構建了一種基于HAP和LAP多層空中中繼的無線蜂窩網絡架構,并提出HAP下多個LAP的定位算法,能夠實現負載均衡,提高用戶服務質量。Lyu等[21]研究多UAV-BS定位優化,假設UAV-BS飛行在給定高度,UAV-BS之間通過衛星遠程中繼互聯且UAV到地面終端信號傳輸為LoS鏈路,提出的定位方法能夠以最少數量基站為區域內所有地面終端提供無線覆蓋。Reina等[22]針對UAV中繼節點定位優化地面節點網絡覆蓋問題,利用隨著布局變化的不同子種群特征,提出一種多子種群遺傳算法來求解不同場景下UAV中繼網絡多目標覆蓋問題。Wang等[23]基于組網成本、用戶服務質量和UAV之間連通性的考慮,提出UAV定位部署方法,通過最小數量UAV來確保覆蓋容量和中繼網絡的連通性。
已有的UAV-BS或空中中繼節點定位主要針對實現區域內用戶的完全覆蓋,或在完全覆蓋的基礎上提供特定的服務質量或部署成本優化。盡管如此,在實際應用中,特別是在臨時場景和應急情況下,部署UAV-BS的數量往往是有限的,或者地面終端分布地域過大,可能難以覆蓋區域內的所有地面終端。針對覆蓋不充分條件下如何最大程度優化用戶覆蓋以及優化系統功耗的研究較少,文獻[14]和文獻[17]對此提出了解決方法,但主要針對不充分覆蓋時單個UAV-BS基站定位優化,而實際中多個空中基站組網需求在逐步增加。正因為如此,研究多UAV-BS整體布局定位方法是必要的,能夠提升地面終端通信總體服務質量,滿足應急通信需要。本文提出多UAV-BS位置布局模型,分別對基站高度和水平布局進行優化,并在維持覆蓋最多用戶數的前提下,進一步優化各UAV-BS覆蓋范圍,最大程度減少基站功率,針對優化模型提出的求解算法具有低階多項式的時間復雜度。最后,通過多場景仿真驗證了所提方法的有效性,結果表明該方法能夠實現多基站組網3D定位,實現最大化用戶覆蓋并能降低基站功率。
1 問題描述及模型假設
問題場景是:在區域R3內分布n個地面終端,因固定通信設施缺乏和通信網絡保障急需,臨時部署m個UAV-BS,為地面終端提供通信接入和中繼。由于地域較大或用戶分布較廣,m個UAV-BS并不能保證對所有地面終端的通信覆蓋,鑒于UAV-BS位置對通信覆蓋的影響,如何對m個UAV-BS進行定位,從而使得處于通信覆蓋范圍的地面終端用戶數最多,并且考慮UAV-BS降低能耗的必要性,在保證覆蓋最多用戶數的同時,盡可能使得每個UAV-BS的發射功率最小。基于該問題建模分析如下:

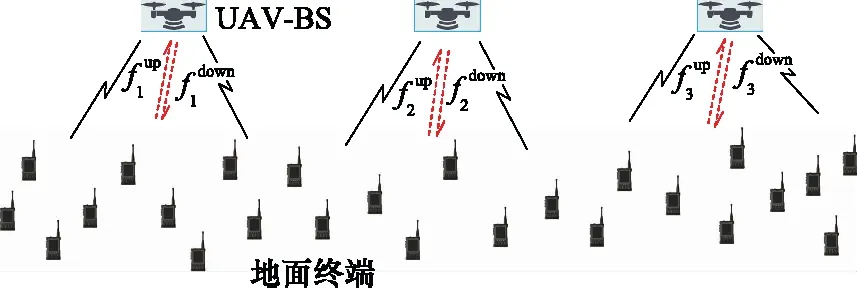
圖1 多UAV-BS組網的頻率使用Fig.1 Frequency usage of multiple UAV-BS networking
(2) 多個UAV-BS組網通信不僅要考慮基站與地面終端之間的通信,還需要考慮多個UAV-BS之間的中繼通信。一般可以采用兩種方式:一是利用衛星通信作為基站之間的遠程中繼鏈路;二是各UAV-BS配置自組網通信模塊及相應頻率,在基站之間組成連通的ad hoc網絡。兩種方式各有優勢和應用場景。本文采用第一種方式的多UAV-BS組網,因此可以認為基站之間通信中繼對部署位置沒有額外要求。
(3) UAV-BS發出的無線信號到達地面終端傳播路徑主要是LoS和NLoS兩類,由于無線傳輸的時變性,即時路徑傳播損耗難以評估,同時也很難去判斷具體的傳輸路徑是LoS還是NLoS,因此主要考慮的是UAV-BS到地面終端的平均傳輸損耗,這在無線傳輸覆蓋估算方面也是常見的處理方式[12,14-15]。
2 多基站定位模型
2.1 高度定位
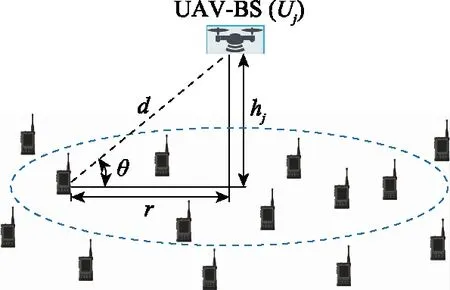
圖2 UAV-BS到地面終端的無線傳輸Fig.2 Wireless transmission from UAV-BS to ground termianl
UAV-BS(Uj)發出的無線信號到達地面終端傳播路徑主要是LoS和NLoS兩類,UAV-BS與地面終端之間建立LoS傳輸的概率[12]是:
(1)
式中:a和b是由傳播環境決定的常數,則NLoS傳輸概率為PNLoS=1-PLoS,UAV-BS與地面終端在兩類傳輸情況下的損耗分別為
(2)
(3)
式中:ηLoS和ηNLoS分別是LoS傳播和NLoS傳播在自由空間傳輸損耗基礎上的附加損耗,服從高斯分布;c為光速。則UAV-BS與地面終端的平均傳輸損耗為
L(hj,r)=LLoS·PLoS+LNLoS·PNLoS
(4)
令UAV-BS與地面終端之間信號傳輸損耗門限為Lth,即當L(hj,r)≤Lth時,則該地面終端在UAV-BS的通信覆蓋范圍內。令L(hj,r)=Lth時UAV-BS(Uj)水平覆蓋半徑為Rj,即:
(5)

(6)
基于該模型可以得到多UAV-BS組網時各基站的最優高度定位,此結果并未考慮UAV-BS的功率優化。
2.2 水平定位

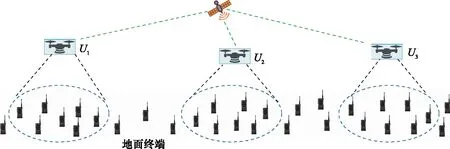
圖3 多UAV-BS組網示意Fig.3 Demonstration of multiple UAV-BS networking
地面終端Pi的位置為(ai,bi),i=1,2,…,n,終端Pi是否在UAV-BS覆蓋范圍內,用ui來表示,當地面終端Pi在其中任何一個UAV-BS覆蓋范圍內,記錄ui=1;其在所有UAV-BS覆蓋范圍之外,則ui=0。并且在同一個時刻,每個地面終端只接入一個UAV-BS,為了表征終端Pi接入哪一個UAV-BS,引入表征量ki。如果地面終端Pi接入第j個UAV-BS(此時Pi應在第j個UAV-BS的覆蓋范圍內),表示為ki=j;如果地面終端Pi不在任何UAV-BS的覆蓋范圍內,則ki=0。則覆蓋最多地面終端的優化目標表示為
(7)
約束條件是在各UAV-BS覆蓋范圍內的地面終端與對應UAV-BS的距離不超過其覆蓋半徑,可以表示為
i=1,2,…,n,ki≠0
(8)

min{r1,r2,…,rm}
(9)
該優化目標中各UAV-BS覆蓋的地面終端集合沒有變化,但各UAV-BS的覆蓋半徑進行了最小化調整,因此各UAV-BS的位置相較于式(7)會發生變化,其約束條件可以表示為
(10)
總的來看,水平布局優化模型分為兩個階段,分別是覆蓋最多地面終端的優化模型和功率最小化模型。
第一階段:
(11)
該模型中,ui、ki、(xki,yki)是待求未知變量,可以求解得到各UAV-BS覆蓋區域內的地面終端集合Sj,將該結果代入功率最小化模型。
第二階段:
min {r1,r2,…,rm}
(12)
2.3 完整定位流程
各UAV-BS覆蓋半徑發生了變化,不會影響θOPT,θOPT僅與傳播環境相關,但根據式(6),相應地UAV-BS(Uj)定位高度需要進行調整,即:
(13)
(14)
基于上述模型可以得到完整的定位流程,如下所示。
輸入a,b,ηLoS,ηNLoS,PRmin,PTj,j=1,2,…,m,(ai,bi),i=1,2,…,n。
步驟 1在式(5)中代入a,b,ηLoS,ηNLoS,求解方程?Rj/?θ=0得到θOPT。


3 求解算法

(15)
式中:circle{·}表示地面終端位置點集{·}的最小覆蓋圓半徑。平面n個節點的最小覆蓋圓能夠基于隨機增量構建算法求解,其時間復雜度為O(n)。求解上述聯合模型可以采用遺傳算法框架并結合隨機增量構建算法,主要流程如圖4所示。
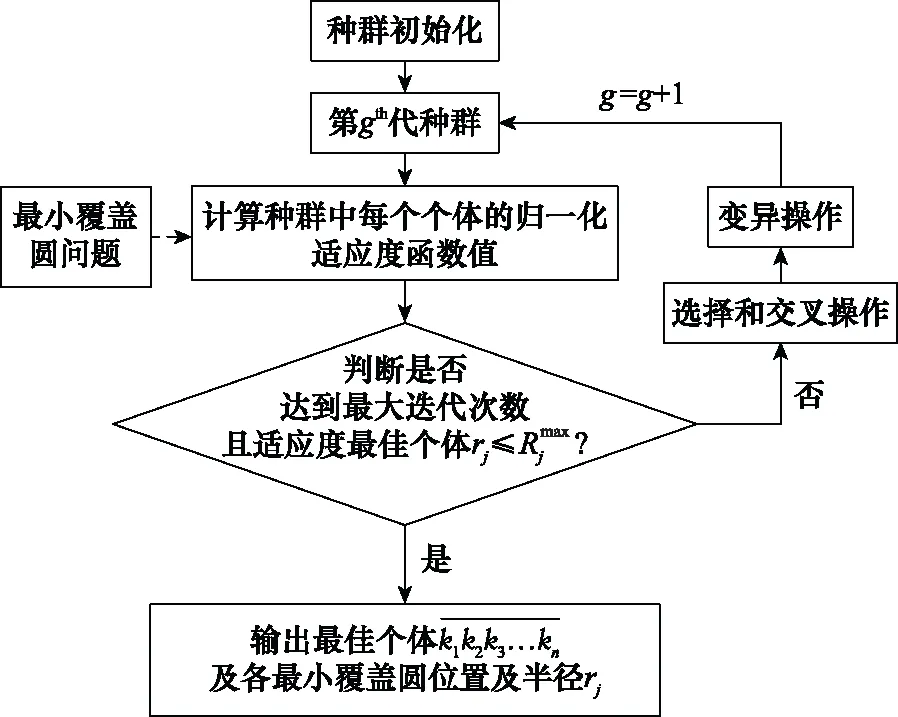
圖4 多UAV-BS定位中步驟3的遺傳算法求解流程Fig.4 Genetic algorithm-based solution process in step 3 of multiple UAV-BS positioning
(16)
式中:D是一個大數;Nu是未被UAV-BS覆蓋的地面終端的數量;rj是各個最小覆蓋圓的半徑。對于種群中的所有個體,基于式(16)得到對應的J值為J1,J2,…,JZ。進一步可以得到最小值Jmin=min{J1,J2,…,JZ}和最大值Jmax=max{J1,J2,…,JZ},因此該種群中各個體對應的歸一化適應度為
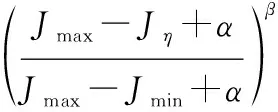
(17)
式中:α是一個接近于0的正數,如α=10-6;β是一個較小的正整數,如β=2。
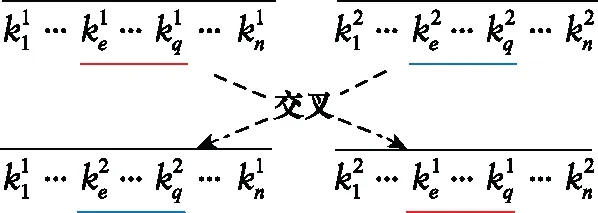
圖5 兩點交叉操作Fig.5 Two-point crossover operation
步驟 5變異操作。基于變異概率(5%~15%),首先確定種群中變異個體的數量,并隨機選擇變異個體。對于每個需要執行變異的個體,采用隨機單點基因變異方案。
接下來分析求解算法的時間復雜度。根據求解流程,計算復雜度主要的影響因素是遺傳算法迭代次數G、種群規模Z和地面終端數量n,遺傳算法找到最優解的時間復雜度不超過O(G·Z)。嵌入其中的最小覆蓋圓求解時間復雜度為O(n),因此所提出的整個求解算法的時間復雜度為O(G·Z·n)。本質上求解算法的時間復雜度是問題規模變量的3次多項式量級。
4 仿真驗證
在仿真場景中,考慮一個10 km×10 km的郊區環境,傳播環境常數a=4.88和b=0.43,LoS傳播和NLoS傳播在自由空間傳輸損耗基礎上的附加損耗ηLoS=0.1和ηNLoS=21。在該區域內隨機分布100個地面移動終端,由3個UAV-BS(分別記為U1、U2和U3)實現組網覆蓋,采用異頻組網,基站發射頻率工作在2 GHz頻段,依次間隔10 MHz,其他參數如表1所示。
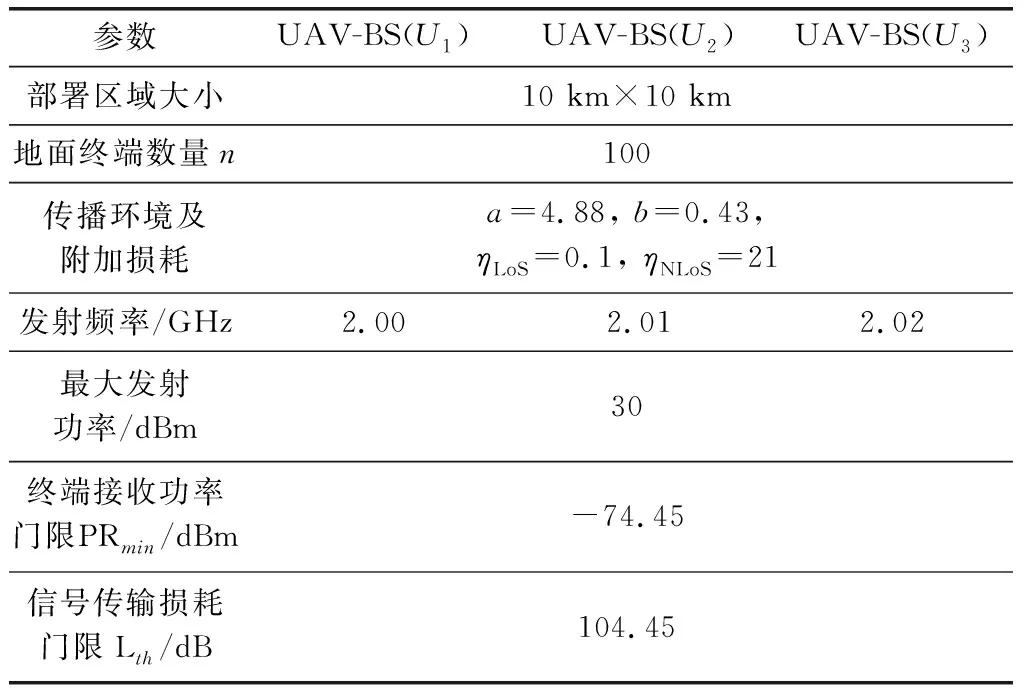
表1 仿真場景主要參數
基于上述條件,通過式(5)可求解得到θOPT=0.355(20.34°)和3個基站的最大覆蓋半徑分別為1.82 km、1.81 km和1.80 km,再代入式(6)可得其最佳高度定位分別為674.7 m、671.0 m和667.3 m,如表2所示。
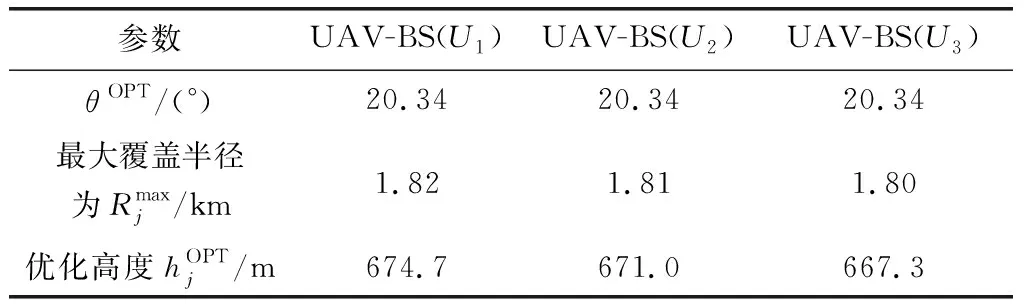
表2 UAV-BS高度定位結果
下面根據地面終端分布情況,驗證4種場景下UAV-BS組網布局:① 地面終端分別在3個較小子區域集中分布;② 部分地面終端在2個較小子區域呈現集中分布,其他終端在較大范圍帶狀分布;③ 部分地面終端在1個較小區域集中分布,其他終端在兩個較大范圍區域集中分布;④ 地面終端在區域內隨機分布,范圍較廣。
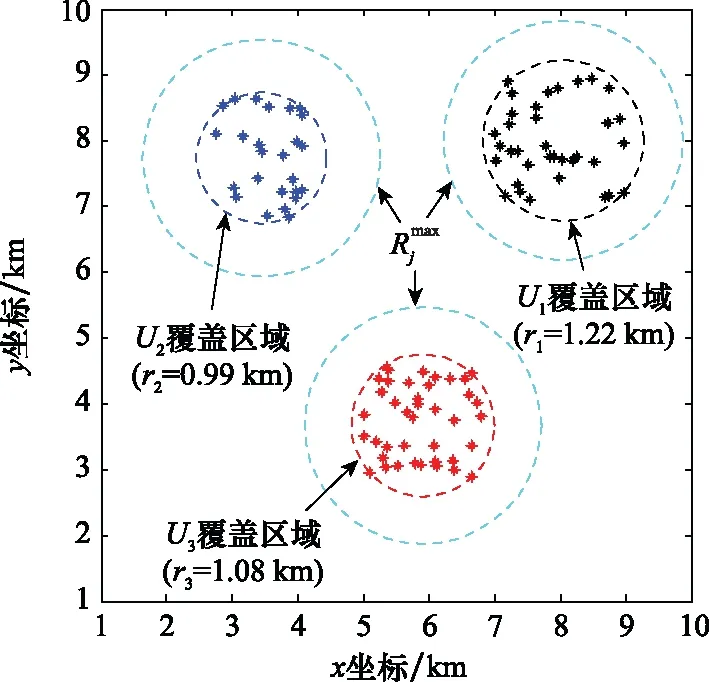
圖6 場景①多UAV-BS定位水平布局Fig.6 Horizontal layout of multiple UAV-BSs in scenario ①
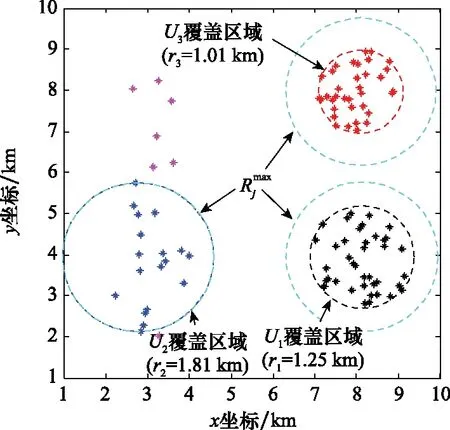
圖7 場景②多UAV-BS定位水平布局Fig.7 Horizontal layout of multiple UAV-BSs in scenario ②
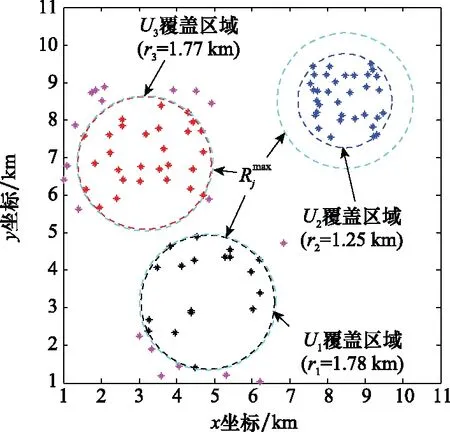
圖8 場景③多UAV-BS定位水平布局Fig.8 Horizontal layout of multiple UAV-BSs in scenario ③
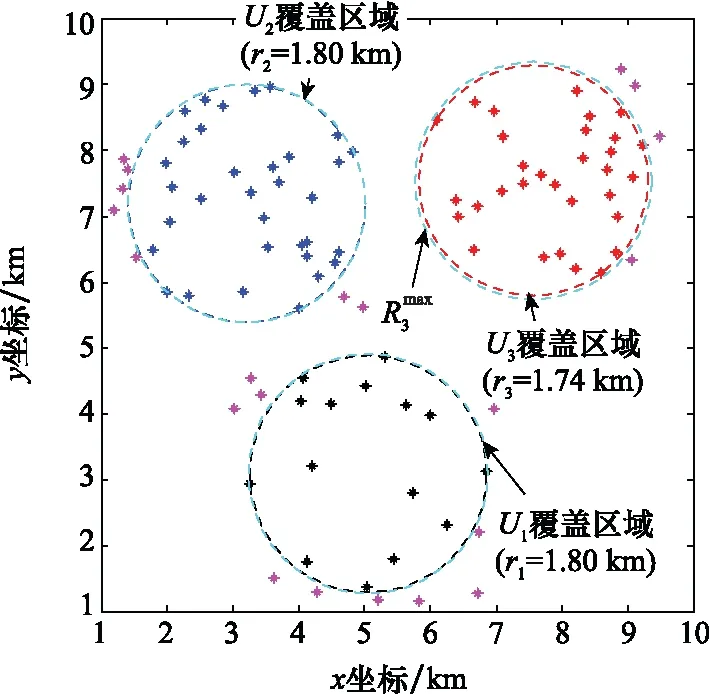
圖9 場景④多UAV-BS定位水平布局Fig.9 Horizontal layout of multiple UAV-BSs in scenario ④
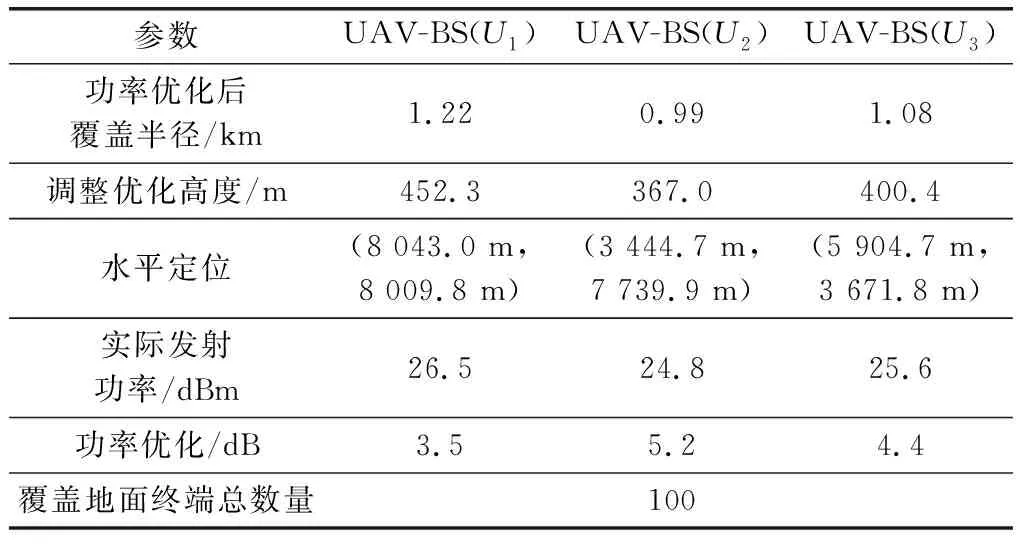
表3 場景①的多UAV-BS定位結果
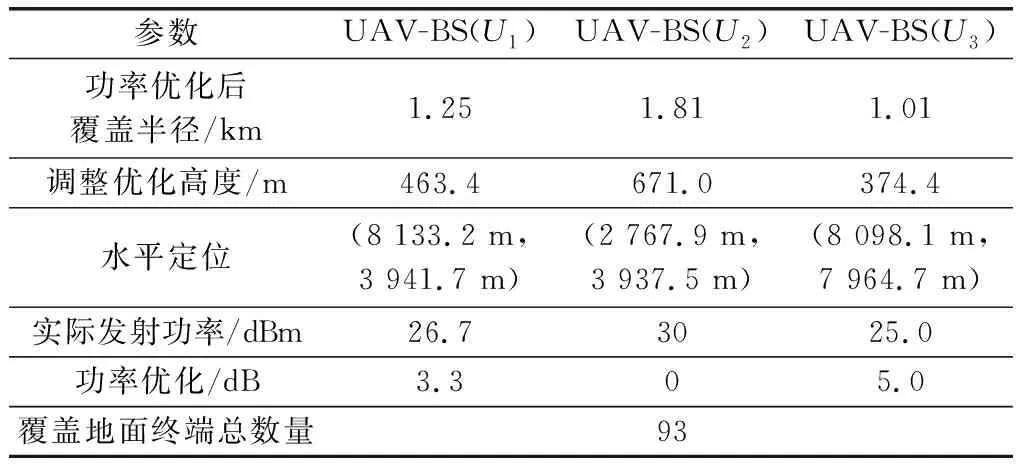
表4 場景②的多UAV-BS定位結果
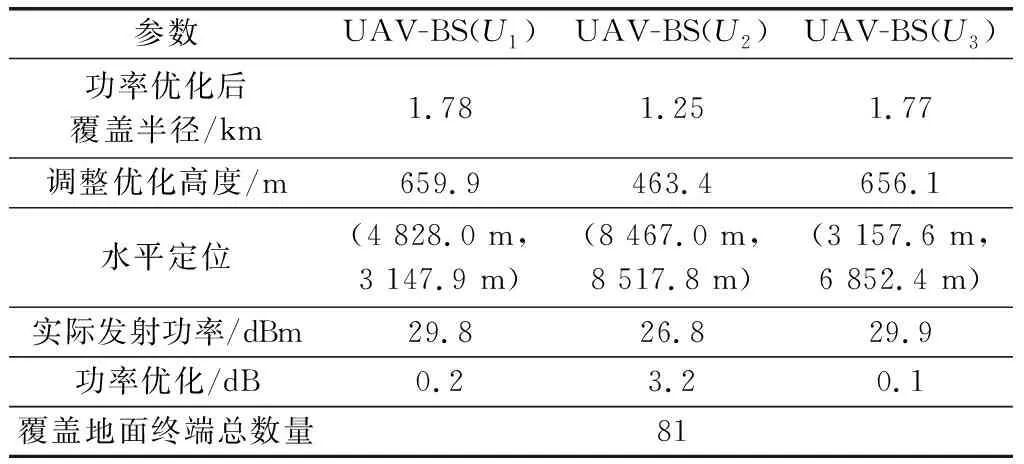
表5 場景③的多UAV-BS定位結果
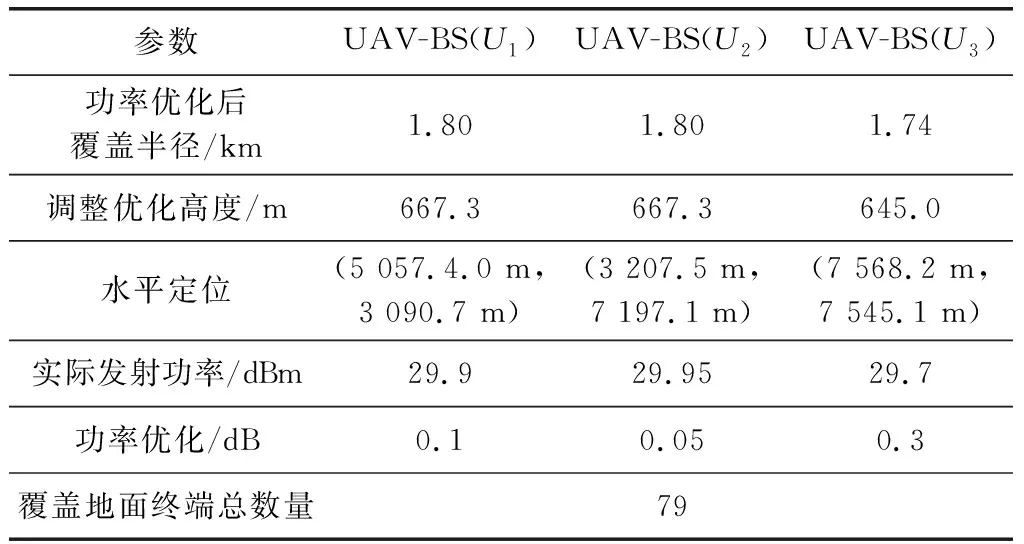
表6 場景④的多UAV-BS定位結果
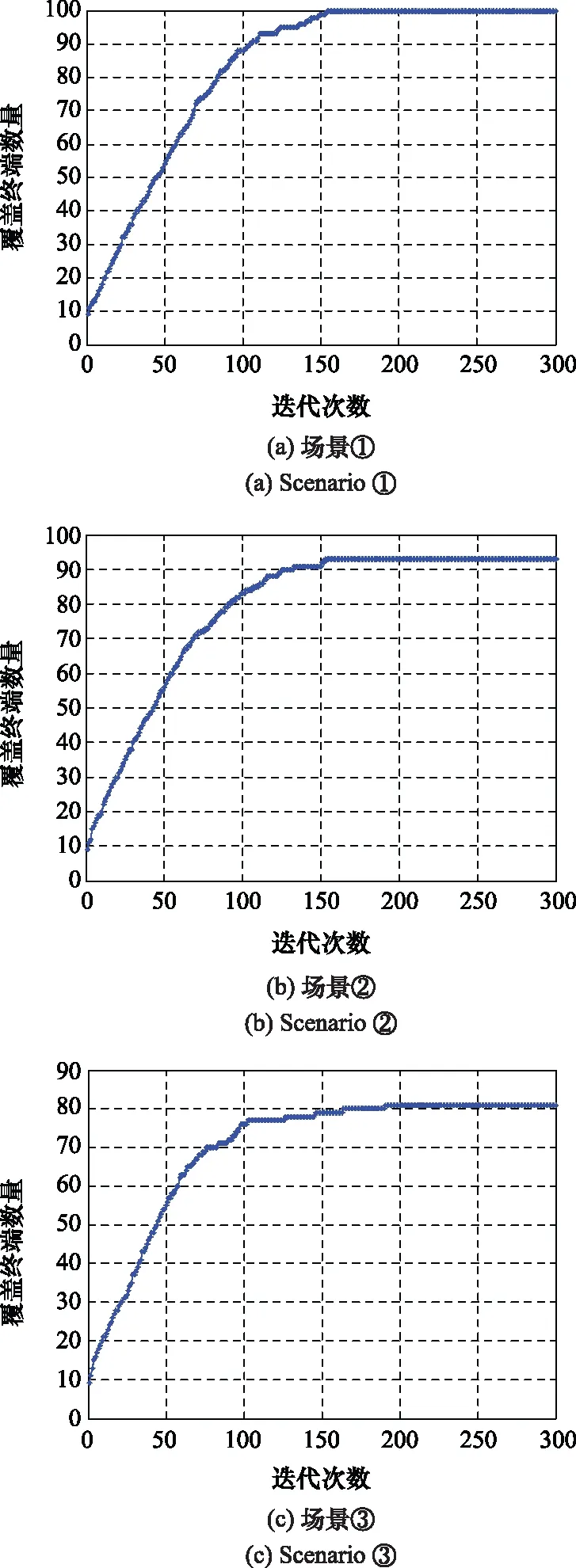
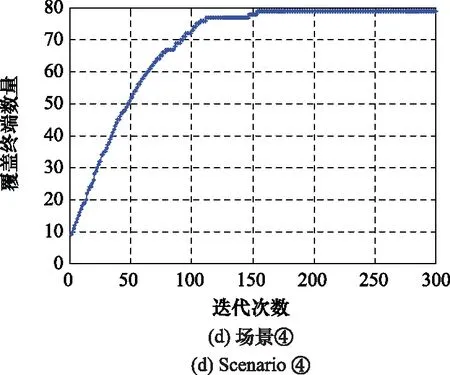
圖10 4種場景下的求解算法收斂效果Fig.10 Convergence effect of the solution algorithm in four scenarios
5 結 論
在應急或臨時任務通信場景中難以實現對區域內所有地面終端覆蓋時,如何通過對多UAV-BS定位布局實現覆蓋用戶數量的最大化且最大程度優化基站發射功率,對于提升多UAV-BS組網效能非常關鍵。本文將多UAV-BS定位分解為高度定位和水平定位,首先基于通信區域LoS和NLoS傳輸統計特性計算最大覆蓋半徑及相應的UAV-BS定位高度,然后將水平布局形式化為多圓覆蓋問題,構建了非線性優化模型,能夠使得覆蓋的地面終端數量最多且所需要的基站發射功率最小。基于最小覆蓋圓問題和遺傳算法提出了該定位模型的求解算法,算法具有較低的時間復雜度和較好的穩定性。通過各種典型應用場景對該方法進行了仿真驗證,在多UAV-BS組網中應用該方法能夠覆蓋最多地面終端且最大程度優化基站發射功率,有效提升UAV-BS通信組網保障效能。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45