基于零控脫靶量的大氣層外攔截中制導(dǎo)方法研究
2023-03-23 06:03:16端軍紅王明宇殷雙斌
系統(tǒng)工程與電子技術(shù) 2023年2期
關(guān)鍵詞:發(fā)動(dòng)機(jī)
趙 蒙, 端軍紅, 王明宇, 殷雙斌, 魯 娜
(1. 空軍工程大學(xué)防空反導(dǎo)學(xué)院, 陜西 西安 710051; 2. 93792部隊(duì), 河北 廊坊 065000)
0 引 言
導(dǎo)彈制導(dǎo)律的設(shè)計(jì)研究一直是精確制導(dǎo)控制領(lǐng)域內(nèi)關(guān)注的熱點(diǎn)課題之一[1-6],導(dǎo)彈制導(dǎo)過程一般分為初制導(dǎo)、中制導(dǎo)和末制導(dǎo),中制導(dǎo)主要作用是控制攔截器飛行至目標(biāo)附近空域,為末制導(dǎo)提供良好的交班環(huán)境,確保末制導(dǎo)的順利實(shí)施[7-9]。對于彈道導(dǎo)彈目標(biāo)的攔截,傳統(tǒng)破片式殺傷難以有效摧毀彈頭目標(biāo),必須使攔截彈直接通過動(dòng)能碰撞方式實(shí)現(xiàn)對彈頭目標(biāo)的有效攔截,這對攔截彈制導(dǎo)律的制導(dǎo)精度提出了更高要求[10-11]。中制導(dǎo)與末制導(dǎo)有著本質(zhì)的不同,中制導(dǎo)終端約束條件不是攔截器與目標(biāo)的相對距離為零,而是使攔截彈在中段發(fā)動(dòng)機(jī)關(guān)機(jī)后處于“零控?cái)r截狀態(tài)”,大部分學(xué)者在中制導(dǎo)律研究方面,主要是使用最優(yōu)化理論[12-15]等方法以消除零控脫靶量為目標(biāo)[16-19]。文獻(xiàn)[20]將目標(biāo)和攔截器的引力加速度差簡化后,提出了一種基于零控脫靶量的中制導(dǎo)律,但該制導(dǎo)律只適用于近距離目標(biāo)攔截情況,在遠(yuǎn)距離目標(biāo)攔截中無法保證制導(dǎo)精度。文獻(xiàn)[21]設(shè)計(jì)了一種彈道導(dǎo)彈助推段攔截最優(yōu)制導(dǎo)律,由于無法精確獲得彈道導(dǎo)彈目標(biāo)推力加速度,該制導(dǎo)律并不實(shí)用。文獻(xiàn)[22]基于零控脫靶量設(shè)計(jì)了制導(dǎo)律,文獻(xiàn)[23]提出了一種攔截主動(dòng)防御目標(biāo)的微分對策制導(dǎo)律,但是在計(jì)算過程中都涉及到大量的微積分運(yùn)算,對彈載計(jì)算機(jī)的數(shù)據(jù)處理能力要求非常高。文獻(xiàn)[24]設(shè)計(jì)了一種基于零控脫靶量的大氣層外超遠(yuǎn)程攔截制導(dǎo)方法,在制導(dǎo)過程中由于該制導(dǎo)律的推力方向變化較為劇烈,對攔截器姿態(tài)控制系統(tǒng)要求非常高,不利于工程設(shè)計(jì)。文獻(xiàn)[25]提出了一種基于線性重力差模型的攔截彈中制導(dǎo)方法,論文中采用延遲點(diǎn)火的策略去修正預(yù)測模型與實(shí)際情況的偏差,但是延時(shí)點(diǎn)火的具體時(shí)間難以精確計(jì)算。
本文針對大氣層外的中段反導(dǎo)作戰(zhàn),基于零控脫靶量采用最優(yōu)控制理論,以脫靶量和攔截彈發(fā)動(dòng)機(jī)的推力加速度為性能指標(biāo),設(shè)計(jì)了一種攔截彈發(fā)動(dòng)機(jī)固定推進(jìn)時(shí)間的中制導(dǎo)策略,仿真結(jié)果表明,在脫靶時(shí)間和脫靶量計(jì)算足夠精確條件下,本文設(shè)計(jì)的反導(dǎo)攔截彈中制導(dǎo)律脫靶量可控制在百米量級內(nèi),為攔截彈以動(dòng)能碰撞方式攔截目標(biāo)創(chuàng)造了良好的末制導(dǎo)條件。
1 相對運(yùn)動(dòng)模型建立
在地心慣性坐標(biāo)系下,設(shè)目標(biāo)位置矢量為RT、速度矢量為VT,攔截彈位置矢量為RI、速度矢量為VI,則目標(biāo)相對于攔截彈的位置矢量和速度矢量R=RT-RI、V=VT-VI,反導(dǎo)作戰(zhàn)過程中攔截彈和目標(biāo)的幾何關(guān)系如圖1所示。
圖1 攔截過程幾何示意圖Fig.1 Geometric diagram of interception process
大氣層外攔截彈和目標(biāo)的運(yùn)動(dòng)方程為
(1)
(2)
式中:rT,rI分別為RT和RI的大小;μ為地球引力常數(shù);aI為攔截彈發(fā)動(dòng)機(jī)推力加速度矢量;f為軌道攝動(dòng)加速度矢量[26-27]。在地心慣性坐標(biāo)系下f在3個(gè)軸的加速度分量分別為
(3)
式中:x、y、z為空間目標(biāo)的位置分量;J2=1.082 64×10-3;re為地球赤道半徑。
由式(1)和式(2)可得目標(biāo)相對于攔截彈運(yùn)動(dòng)方程為
(4)
由于反導(dǎo)作戰(zhàn)過程中攔截彈與彈道目標(biāo)飛行時(shí)間相對較短,相對重力加速度而言攝動(dòng)力產(chǎn)生的加速度非常小,因此目標(biāo)與攔截彈的攝動(dòng)加速度之差則可以忽略不計(jì),也就是fT-fI≈0。另外,假設(shè)在目標(biāo)與攔截彈的相對運(yùn)動(dòng)過程中,將攔截彈和目標(biāo)所受到的地球引力加速度之差簡化為線性模型[20],即
(5)
式中:tf為攔截時(shí)刻;G(t0)=GT(t0)-GI(t0)為目標(biāo)與攔截彈的重力差。
設(shè)tbo(tf≥tbo≥t0)為攔截彈發(fā)動(dòng)機(jī)關(guān)機(jī)時(shí)刻,則攔截彈在固體發(fā)動(dòng)機(jī)燃料耗盡之后,攔截彈推力加速度aI=0,聯(lián)立式(4)和式(5)可解得攔截彈和目標(biāo)相對運(yùn)動(dòng)方程:
(6)
(7)
攔截彈中制導(dǎo)發(fā)動(dòng)機(jī)關(guān)機(jī)后,后續(xù)時(shí)間直至末制導(dǎo)攔截彈將無控自由地向目標(biāo)飛行,因此中制導(dǎo)終端約束不是使攔截彈與目標(biāo)之間的相對距離為零,而是在中制導(dǎo)結(jié)束后使攔截彈在無控狀態(tài)下飛行至目標(biāo),即零控脫靶量為零。
根據(jù)脫靶量定義以及彈目相對運(yùn)動(dòng)方程,攔截彈在無控飛行狀態(tài)下,脫靶時(shí)刻可根據(jù)下式求解:
R(tf)·V(tf)=0
(8)
將式(6)、式(7)代入式(8)得
(9)
其中,脫靶時(shí)刻tf可通過牛頓迭代法求解式(9)獲得,最終可得零控脫靶量預(yù)測值為
(10)
2 攔截彈制導(dǎo)律設(shè)計(jì)
將目標(biāo)相對于攔截彈運(yùn)動(dòng)方程改寫成狀態(tài)空間表示形式:

(11)

根據(jù)攔截彈和目標(biāo)的相對運(yùn)動(dòng)方程,令t0=tbo可知
(12)
所以
X(tf)=P1X(tbo)+P2
(13)
式中:
在反彈道導(dǎo)彈作戰(zhàn)中,要實(shí)現(xiàn)對彈道導(dǎo)彈的有效攔截,則攔截彈的脫靶量必須足夠小,以保證攔截器與目標(biāo)的直接碰撞,另外由于攔截彈的有效載荷有限,所以其攜帶的固體燃料也是非常有限的,在中制導(dǎo)過程中還要控制能量消耗。因此,以攔截彈與目標(biāo)相對距離和攔截彈發(fā)動(dòng)機(jī)的推力加速度作為優(yōu)化指標(biāo),設(shè)性能指標(biāo)函數(shù)[28-29]為
(14)
根據(jù)狀態(tài)空間方程和性能指標(biāo)函數(shù),可得哈密頓函數(shù)[30-31]為
(15)
正則方程為
(16)
式(16)為一階齊次微分方程組,可解得
λ(t)=e-ATtλ(0)=
(17)
終端指標(biāo)函數(shù)可以表示成攔截彈發(fā)動(dòng)機(jī)關(guān)機(jī)時(shí)刻預(yù)測出脫靶時(shí)刻攔截彈與目標(biāo)相對位置的平方形式,因此終端條件可表示為
(18)
所以橫截條件
(19)
所以
(20)
令
根據(jù)最優(yōu)控制理論,極小值條件可通過求解控制方程獲得,由控制方程?H/?U(t)=0可得
U(t)=-BTλ(t)=-BTω(t,tbo)λ(tbo)
(21)
聯(lián)立方程式(19)和式(21)可知
(22)
將式(20)、式(21)代入到狀態(tài)方程式(11)中得
(23)
解方程式(23)可得
(24)
令t=tbo可得

(25)
將式(25)代入式(22),化簡后得到制導(dǎo)加速度:
(26)
式中:tbo≥t≥0;tg=tf-t為剩余飛行時(shí)間;tb=tbo-t為發(fā)動(dòng)機(jī)剩余工作時(shí)間。
在上述計(jì)算過程中,將攔截彈和目標(biāo)的引力加速度差利用線性化重力模型替代,若目標(biāo)與攔截彈的相對距離較近,可將目標(biāo)和攔截彈引力加速度差視為零,即GI(t0)≈GT(t0),則攔截彈發(fā)動(dòng)機(jī)關(guān)機(jī)后目標(biāo)相對于攔截彈的運(yùn)動(dòng)方程為
V(t)=V(t0)
(27)
R(t)=V(t0)(t-t0)+R(t0)
(28)
則預(yù)測的脫靶量和脫靶時(shí)刻為
(29)
同理,令式(11)中U=-aI(t)、式(13)中X(tf)=P1X(tbo),再次使用最優(yōu)化理論可解得
(30)
將式(10)、式(29)代入式(26)、式(30),可得到通用形式的制導(dǎo)律:
(31)
式中:Rmiss(t)表示為t(tbo≥t≥0)時(shí)刻攔截彈與目標(biāo)之間的零控脫靶量。當(dāng)攔截彈的推力發(fā)動(dòng)機(jī)工作時(shí)間tbo設(shè)定好之后,目標(biāo)速度和位置狀態(tài)可根據(jù)Kepler理論進(jìn)行實(shí)時(shí)估計(jì),攔截彈的位置和速度可由彈載測量設(shè)備實(shí)時(shí)獲取,攔截彈發(fā)動(dòng)機(jī)點(diǎn)火后可根據(jù)式(31)近似估算的加速度指令制導(dǎo)控制攔截彈飛行。
3 脫靶量的計(jì)算
根據(jù)第2節(jié)內(nèi)容可知,制導(dǎo)加速度最終可以表達(dá)為脫靶時(shí)刻tf、攔截彈發(fā)動(dòng)機(jī)工作時(shí)間tbo以及脫靶量Rmiss的函數(shù),在發(fā)動(dòng)機(jī)工作時(shí)間以及脫靶時(shí)刻確定以后,接下來就是如何精確預(yù)測脫靶量Rmiss。制導(dǎo)律設(shè)計(jì)中,終端指標(biāo)函數(shù)表示為攔截彈脫靶時(shí)刻攔截彈與目標(biāo)相對位置的平方,由于論文中通過近似等效方式獲得攔截彈與目標(biāo)之間的相對運(yùn)動(dòng)方程,與真實(shí)的相對運(yùn)動(dòng)方程必然存在著差異。
當(dāng)設(shè)定攔截時(shí)間tf、發(fā)動(dòng)機(jī)工作時(shí)長tbo后,關(guān)于脫靶量Rmiss的預(yù)測一般有兩種方法。一種是利用等效近似的解析方法來求解脫靶量的大小,這種方法優(yōu)勢是計(jì)算速度相對較快,但是計(jì)算精度低,例如式(10)、式(29)就是利用近似等效方法求解。另一種是利用Kepler橢圓軌道理論分別迭代計(jì)算攔截彈和目標(biāo)的位置矢量,然后做差來求解脫靶量,這種方法計(jì)算精度很高,但是在制導(dǎo)過程中需要持續(xù)迭代求解目標(biāo)和攔截彈的位置。
近似等效的解析方法論文中已經(jīng)有相關(guān)計(jì)算方法,下面重點(diǎn)就如何利用Kepler理論迭代計(jì)算脫靶量大小的方法進(jìn)行介紹,計(jì)算流程圖如圖2所示,具體計(jì)算步驟如下。
步驟 1初始化,根據(jù)t0時(shí)刻攔截彈和雷達(dá)獲取的目標(biāo)運(yùn)動(dòng)狀態(tài),在攔截彈推力發(fā)動(dòng)機(jī)工作之后開始計(jì)算。
步驟 2根據(jù)初值,計(jì)算起始時(shí)刻的零控脫靶量。
步驟 3根據(jù)計(jì)算出的零控脫靶量計(jì)算攔截彈的推力加速度。
步驟 4以Δt為步長,迭代更新計(jì)算攔截彈和目標(biāo)位置矢量和速度矢量,其中Δt越小,精度越高,但是迭代次數(shù)也相應(yīng)增加。
步驟 5判斷該時(shí)刻t與tbo的大小,若t≤tbo,則返回步驟 2,令t=t0+Δt繼續(xù)迭代計(jì)算;否則結(jié)束計(jì)算。
圖2 脫靶量計(jì)算流程圖Fig.2 Miss distance calculation flow chart
4 仿真驗(yàn)證
4.1 仿真條件
制導(dǎo)律仿真驗(yàn)證時(shí),一般都是以攔截時(shí)刻的脫靶量為指標(biāo)進(jìn)行衡量,下面就本文提出制導(dǎo)律的有效性進(jìn)行驗(yàn)證,參照文獻(xiàn)[10]中的數(shù)據(jù),攔截彈和目標(biāo)初始運(yùn)動(dòng)參數(shù)如表1所示,彈目相距1 560 km,攔截彈中制導(dǎo)段推力發(fā)動(dòng)機(jī)工作時(shí)間為15 s。
表1 攔截彈和目標(biāo)的狀態(tài)信息
4.2 脫靶量仿真
制導(dǎo)加速度最終表達(dá)為脫靶時(shí)刻tf、攔截彈發(fā)動(dòng)機(jī)工作時(shí)間tbo以及脫靶量Rmiss的函數(shù),下面以表1中目標(biāo)和攔截彈的運(yùn)動(dòng)數(shù)據(jù),對脫靶量進(jìn)行仿真計(jì)算。仿真時(shí)間從中制導(dǎo)發(fā)動(dòng)機(jī)工作開始至發(fā)動(dòng)機(jī)關(guān)機(jī)結(jié)束,共計(jì)工作15 s,中制導(dǎo)統(tǒng)一使用式(31)進(jìn)行制導(dǎo),將不同的脫靶量計(jì)算方法應(yīng)用到攔截彈中制導(dǎo)過程,制導(dǎo)過程中脫靶量的變化結(jié)果如圖3~圖5所示。其中預(yù)測圖3使用式(10)、圖4使用式(29)、圖5使用Kepler迭代法計(jì)算脫靶量,真實(shí)脫靶量是通過軌道積分計(jì)算而得到的。中制導(dǎo)結(jié)束后,不同方法估計(jì)的脫靶量和真實(shí)脫靶量如表2所示,由仿真結(jié)果可見,Kepler迭代法預(yù)測出的脫靶量精度最高,式(29)預(yù)測的精度最差,式(10)介于兩者之間。
圖3 式(10)預(yù)測出的脫靶量變化曲線Fig.3 Variation curve of miss distance predicted by equation (10)
圖4 式(29)預(yù)測出的脫靶量變化曲線Fig.4 Variation curve of miss distance predicted by equation (29)
圖5 Kepler迭代法預(yù)測出的脫靶量變化曲線Fig.5 Variation curve of miss distance predicted by Kepler iterative method
4.3 仿真數(shù)據(jù)
從圖6可以看出,自慣性坐標(biāo)系下,加入中制導(dǎo)后攔截彈逐漸向目標(biāo)運(yùn)動(dòng)。下面著重對不同模型下制導(dǎo)律的性能進(jìn)行仿真比較,仿真計(jì)算中,脫靶時(shí)刻分別由式(9)、式(29)迭代計(jì)算,如圖7所示,其中t1利用式(29)計(jì)算,t2利用式(9)計(jì)算。

表2 脫靶量計(jì)算結(jié)果
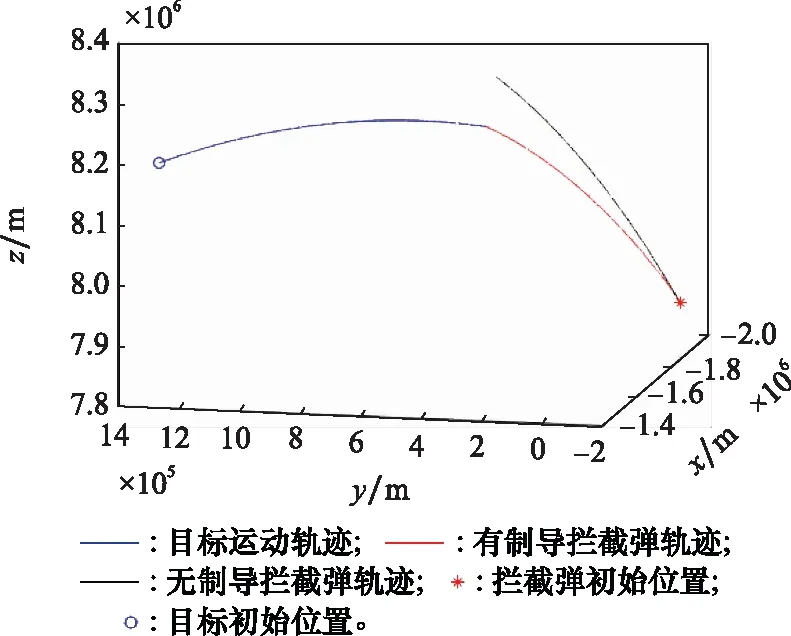
圖6 慣性坐標(biāo)系下攔截彈和目標(biāo)的運(yùn)動(dòng)軌跡Fig.6 Trajectory of interceptor and target in inertial coordinate system
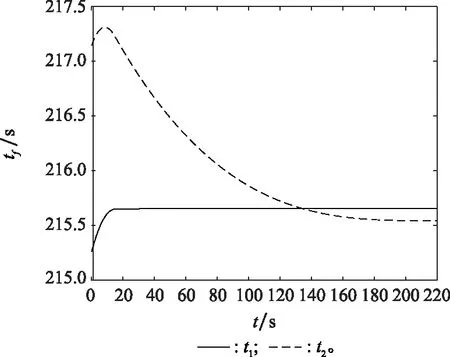
圖7 脫靶時(shí)刻的迭代計(jì)算結(jié)果Fig.7 Iterative calculation results of miss time
分別利用式(26)、式(30)和式(31)制導(dǎo)控制攔截彈的飛行狀態(tài),使用式(31)制導(dǎo)時(shí),脫靶量的大小利用Kepler理論迭代計(jì)算獲得,具體計(jì)算流程如圖2所示。中制導(dǎo)過程中攔截彈與目標(biāo)的脫靶量(彈目相對距離)變化曲線如圖8、圖9所示,其中R1、R2、R3、R4分別表示使用式(30)制導(dǎo)、使用式(26)制導(dǎo)、使用式(31)制導(dǎo)以及攔截彈在無制導(dǎo)時(shí)脫靶量變化曲線,攔截效果如表3所示。由仿真結(jié)果可知,使用Kepler迭代法求解出的脫靶量最小,僅為4.48 m,為攔截彈以直接碰撞方式實(shí)現(xiàn)對目標(biāo)的攔截創(chuàng)造了優(yōu)良的末制導(dǎo)條件;使用線性重力差模型得到的脫靶量為330.8 m,還需末制導(dǎo)繼續(xù)修正;使用零重力差模型得到的脫靶量為7 724.8 m,末制導(dǎo)可能無修正能力,可見該模型對于遠(yuǎn)距離攔截效果差。仿真結(jié)果表明,中制導(dǎo)的制導(dǎo)精度與脫靶量估計(jì)精度密切相關(guān),若脫靶量計(jì)算精準(zhǔn),本文所提出的攔截彈中制導(dǎo)律能夠使制導(dǎo)攔截彈以直接碰撞方式實(shí)現(xiàn)對目標(biāo)的攔截。與文獻(xiàn)[10]所提方法相比,本文所設(shè)計(jì)的制導(dǎo)律制導(dǎo)精度更高,在迭代計(jì)算下制導(dǎo)精度可達(dá)米級。
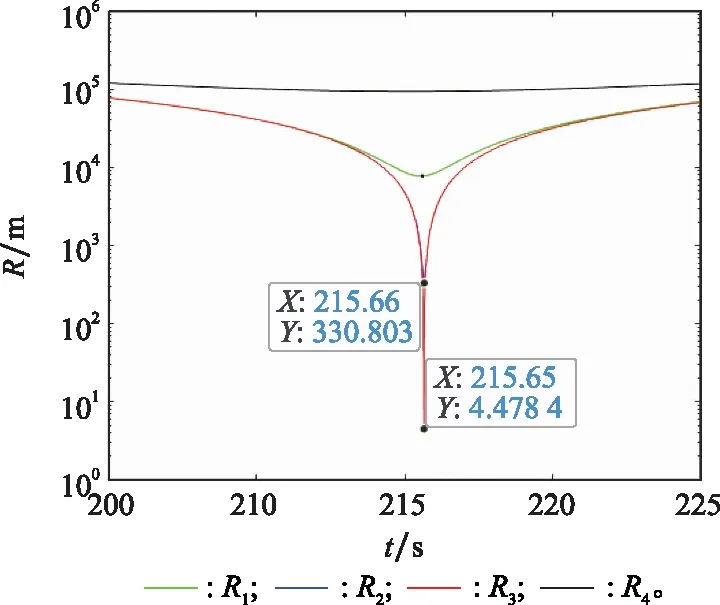
圖8 脫靶量仿真結(jié)果Fig.8 Miss distance simulation results

圖9 脫靶量仿真結(jié)果局部放大圖Fig.9 Partial enlarged view of miss distance simulation results

表3 攔截效果
圖10是使用不同制導(dǎo)公式時(shí)攔截彈制導(dǎo)加速度變化曲線,其中a1、a2、a3分別是利用式(30)、式(26)、式(31)計(jì)算出的攔截彈發(fā)動(dòng)機(jī)推力加速度大小。由圖可見,a2與a3大小相差不大,但是都與a1相差較大,這是由于式(30)在計(jì)算過程中將目標(biāo)與攔截彈的重力差簡化為零的結(jié)果,這也就是圖9中在脫靶時(shí)刻導(dǎo)致脫靶量大的原因,因此為了精確估計(jì)零控脫靶量,攔截彈與目標(biāo)間的重力差必須要合理考慮。
在上述仿真中脫靶時(shí)刻是根據(jù)攔截彈和目標(biāo)運(yùn)動(dòng)狀態(tài)預(yù)測出的,一旦攔截彈和目標(biāo)的運(yùn)動(dòng)參數(shù)確定,脫靶時(shí)刻也就基本確定了。然而實(shí)際反導(dǎo)作戰(zhàn)中,脫靶時(shí)刻并不固定,而是根據(jù)攔截彈的發(fā)射時(shí)刻、運(yùn)動(dòng)參數(shù)等設(shè)定的,脫靶時(shí)刻直接影響著攔截彈的運(yùn)動(dòng)特征,下面著重討論脫靶時(shí)刻對攔截彈加速度指令的影響。分別設(shè)置脫靶時(shí)刻為130 s、150 s、170 s、190 s、210 s,利用式(31)進(jìn)行中制導(dǎo),仿真結(jié)果如圖11和圖12所示。
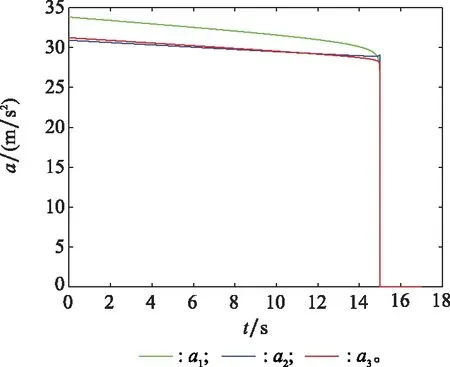
圖10 不同制導(dǎo)律下攔截彈加速度變化曲線Fig.10 Acceleration variation curve of interceptor under different guidance laws
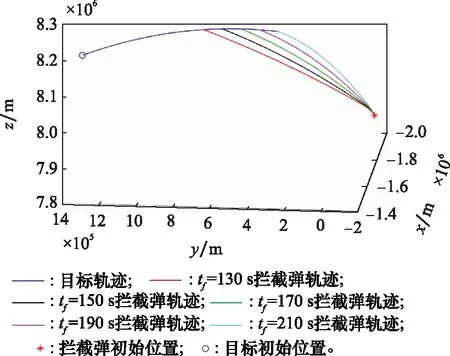
圖11 不同脫靶時(shí)刻下攔截彈的運(yùn)動(dòng)軌跡Fig.11 Trajectory of interceptor at different miss times
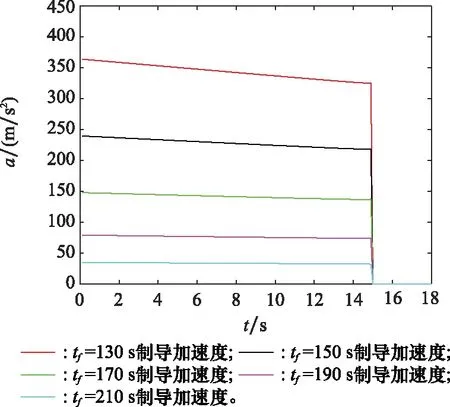
圖12 不同脫靶時(shí)刻下攔截彈的加速度變化曲線Fig.12 Acceleration variation curve of interceptor at different miss times
其中,圖11為不同攔截時(shí)刻攔截彈與目標(biāo)的運(yùn)動(dòng)軌跡,對應(yīng)的脫靶量分別為8.6 m、7.9 m、6.8 m、5.2 m、4.2 m,如表4所示,這進(jìn)一步驗(yàn)證了制導(dǎo)算法的有效性。圖12為不同攔截時(shí)刻攔截彈的加速度曲線,可見脫靶時(shí)刻在130~210 s之間時(shí),攔截彈的機(jī)動(dòng)過載在3g~37g范圍變化,實(shí)際在機(jī)動(dòng)過載過大時(shí)攔截彈可能無法承受。假設(shè)發(fā)動(dòng)機(jī)能夠提供最大的推力加速度為amax,對于采用固定推進(jìn)時(shí)間的中制導(dǎo)發(fā)動(dòng)機(jī),為了保證制導(dǎo)過程中發(fā)動(dòng)機(jī)推力加速度不超過amax,需要合理設(shè)計(jì)脫靶時(shí)刻來實(shí)現(xiàn)這一目標(biāo)。

表4 不同脫靶時(shí)刻攔截效果
5 結(jié)束語
本文基于零控脫靶量采用最優(yōu)控制理論,對大氣層外攔截彈和彈道導(dǎo)彈目標(biāo)的交戰(zhàn)空間進(jìn)行了理論推導(dǎo),設(shè)計(jì)了一種攔截彈中制導(dǎo)指令,通過仿真計(jì)算發(fā)現(xiàn)攔截彈的制導(dǎo)精度與零控脫靶量的預(yù)測精度密切相關(guān),針對固定推進(jìn)時(shí)間的中制導(dǎo)過程討論了調(diào)節(jié)攔截彈機(jī)動(dòng)過載大小的實(shí)現(xiàn)途徑。仿真結(jié)果表明,在脫靶量預(yù)測精確條件下,本文設(shè)計(jì)的反導(dǎo)攔截彈中制導(dǎo)律脫靶量可控制在百米量級內(nèi),制導(dǎo)精度比較高,在中段制導(dǎo)結(jié)束后,為攔截彈順利實(shí)施末制導(dǎo)提供了優(yōu)良的條件。下一步將主要圍繞零控脫靶量的精準(zhǔn)估算開展研究,期望相關(guān)研究結(jié)論對反導(dǎo)攔截彈制導(dǎo)律設(shè)計(jì)及相應(yīng)的仿真技術(shù)研究提供一定的借鑒和參考。
猜你喜歡
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
汽車維修與保養(yǎng)(2020年11期)2020-06-09 05:42:06
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
汽車維護(hù)與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(yǎng)(2015年1期)2015-04-17 03:25:30
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
汽車與新動(dòng)力(2014年6期)2014-02-27 12:10:49
汽車與新動(dòng)力(2014年5期)2014-02-27 12:10:41
汽車與新動(dòng)力(2014年2期)2014-02-27 12:10:15