智能無人船單波束測深系統(tǒng)在水下地形測量中的應(yīng)用
2023-02-02 08:13:06肖杰
測繪工程 2023年1期
關(guān)鍵詞:測量
肖 杰
(山西省測繪地理信息院,太原 030001)
近年來,我國全面推行河長制,加強(qiáng)河湖保護(hù)管理,多地積極開展水資源調(diào)查,對河湖及水庫區(qū)域進(jìn)行水上水下地形測量。在數(shù)據(jù)采集方面,主要有兩種模式:一種是水上和水下部分分別進(jìn)行數(shù)據(jù)采集,水上部分一般應(yīng)用航空攝影測量方法,目前應(yīng)用較多的是基于無人機(jī)載LiDAR系統(tǒng)的三維高精度點(diǎn)云數(shù)據(jù)采集,對于水下測量部分,主要基于船載模式搭載GNSS-RTK、IMU、水深測量系統(tǒng)完成數(shù)據(jù)采集;另一種是基于船載模式集成三維激光掃描儀、水下測量設(shè)備、GNSS和IMU等多傳感器設(shè)備于一體的數(shù)據(jù)采集系統(tǒng)[1-3]。兩種數(shù)據(jù)采集模式各有優(yōu)缺點(diǎn):前者數(shù)據(jù)采集航線布設(shè)自由、靈活,數(shù)據(jù)采集投入成本相對較高;后者數(shù)據(jù)采集投入成本較前者低,但航線布設(shè)要顧及三維激光掃描儀的拍攝范圍,對于庫區(qū)周邊的地形地物有時會被遮擋[2]。因此,在實(shí)際作業(yè)中應(yīng)根據(jù)測區(qū)情況選用合適的外業(yè)數(shù)據(jù)采集模式。
水深測量是水下地形測量最主要的內(nèi)容,針對水深測量目前主要有兩種方法,分別是水位減去水深的傳統(tǒng)測量方法和GNSS-RTK減去水深測量方法[4-5]。根據(jù)使用的測量工具,測深方法主要有:測深桿、測深錘、單頻單波束測深、雙頻單波束測深、多波束測深、機(jī)載激光雷達(dá)測深等[6]。測深桿、測深錘是早期的測深工具,盡管現(xiàn)在測深設(shè)備主要以測深聲吶為主,但在水草密集區(qū)域,或在淺灘測量等聲吶設(shè)備無法工作的地方仍在發(fā)揮重要作用[7]。單波束測深和多波束測深屬于聲吶測深,極大提高了水深測量的精度和效率,多波束測深儀相對單波束測深儀具有測量精度高、測量效率高的特點(diǎn),但價(jià)格昂貴,因此在實(shí)際工作中,單波束測深儀的使用目前仍是主流[8]。本文根據(jù)智能無人船單波束測深特點(diǎn),以某水庫的水下地形測量為例,兼顧測量效率、成本經(jīng)濟(jì)以及成果質(zhì)量,對其作業(yè)過程中的關(guān)鍵技術(shù)展開研究,確定更符合實(shí)際測量需求的最佳技術(shù)路線和方案。
1 無人船水下測深原理
1.1 無人船測量系統(tǒng)
目前,無人船測量系統(tǒng)以其輕便、高效、智能的特點(diǎn)在河湖及水庫水下地形測量中得到了廣泛應(yīng)用,其工作原理為在無人船上搭載多種高精密傳感設(shè)備并協(xié)同作業(yè),其中搭載的GNSS設(shè)備,可以讓無人船勻速行駛在設(shè)計(jì)好的航線上,搭載的測深系統(tǒng)可以在GNSS定位系統(tǒng)的協(xié)助下按照設(shè)定的間距或時間間隔進(jìn)行水深測量,同時獲取測點(diǎn)平面位置,搭載的姿態(tài)傳感器用于獲取測深時無人船的姿態(tài),實(shí)時將定位數(shù)據(jù)、測深數(shù)據(jù)、姿態(tài)數(shù)據(jù)通過通訊設(shè)備傳輸?shù)綌?shù)據(jù)中心,技術(shù)員實(shí)時在操控平板上看到數(shù)據(jù)采集情況[4]。圖1為無人船水下地形測量示意圖。

圖1 無人船水下地形測量示意圖
1.2 單波束測深儀測深原理
單波束測深儀測深是一種由點(diǎn)到線的測量方法,通過安裝在船底的換能器(探頭)垂直向下發(fā)射短脈沖聲波(聲波入射角近似為零),聲波在水中傳播到水底并反射被換能器接收[9-10]。因此,水深值即為聲波在水中傳播的雙程距離的一半,通過聲波在水中傳播時間以及聲波在水介質(zhì)中的平均聲速來確定[11],水深算式為:
(1)
式中:S為換能器到水底的距離;C為聲波在水介質(zhì)傳播的速度,可采用聲速剖面儀進(jìn)行聲速測量;t為聲波的雙程傳播時間[12]。
在實(shí)際水深測量中,需要換能器測水深的基礎(chǔ)上增加換能器吃水深度改正和潮位改正,文中描述的是針對無人船測深系統(tǒng)在水庫的水下測量,不考慮潮位改正。
2 無人船水下地形測量關(guān)鍵技術(shù)分析
2.1 技術(shù)流程
根據(jù)水下測量測區(qū)情況及無人船水下測量原理,擬定無人船水下地形測量技術(shù)流程,如圖2所示。

圖2 無人船水下地形測量技術(shù)流程
2.2 測深水域范圍確定
在進(jìn)行水底地形測量前,首先確定測深水域的范圍線,其主要目的是為了設(shè)計(jì)施測航線,避免不合理的航線設(shè)計(jì)導(dǎo)致影響測量效率和測量安全事件的發(fā)生。通常確定方法為:
1)依據(jù)數(shù)字正射影像圖(DOM)確定測深水域范圍線。依據(jù)DOM繪制水域范圍線,其關(guān)鍵是最新現(xiàn)勢性的影像數(shù)據(jù)獲取,只有水位及水域周邊環(huán)境與實(shí)施水下測量時的水位及周邊環(huán)境相一致的情況下,繪制的水域范圍線才具有實(shí)用性。若條件不允許無法獲取最新現(xiàn)勢性的DOM數(shù)據(jù),則可先在現(xiàn)勢性不佳的影像上依據(jù)水域紋理繪制水域范圍線,然后根據(jù)影像水域邊界特征點(diǎn),進(jìn)行實(shí)地量測水域邊界到圖上繪制的水域邊緣的最短距離,由此將DOM上繪制的水域范圍線通過整體外擴(kuò)或內(nèi)縮的方法來獲取滿足施測要求的測深水域范圍線。
2)常規(guī)陸地測量方法。確定測深水域范圍的傳統(tǒng)測量方法,利用GNSS接收機(jī)實(shí)地沿水域邊緣進(jìn)行常規(guī)RTK或網(wǎng)絡(luò)RTK測量,只需在水域邊緣走向變化的位置處測量即可。用此方法確定水域范圍線其特點(diǎn)是精度高,但是只適合面積較小的水域測量,對于大面積的水域人工工作量較大,且對人員及設(shè)備有一定的安全隱患。
3)無人船測量系統(tǒng)測量水域范圍線。利用搭載單波束測深系統(tǒng)、GNSS和IMU設(shè)備的無人船在水域邊緣進(jìn)行測量,測量時要求在岸邊建立地面基站或連接CORS站,測量所得無人船航跡線即可作為測深水域的范圍線。采用此方法進(jìn)行水域范圍線采集工作效率高,但要求作業(yè)人員對水域環(huán)境有一定了解,通常需要額外配備望遠(yuǎn)鏡或具有無人船功能的以實(shí)時了解施測的周邊環(huán)境,邊踏勘邊測量,若發(fā)現(xiàn)水域中有島類地物或比較茂盛水草,則需將無人船未觸及的地方也進(jìn)行標(biāo)定,避免造成無人船擱淺等事故發(fā)生。
根據(jù)具體情況采用合適的水域范圍線采集方法,必要時可以多種方法結(jié)合使用,準(zhǔn)確確定測深水域范圍線是提高水下測量工作效率的一個重要因素。
2.3 測深線布設(shè)
測深線布設(shè)是實(shí)施水下測量的一個極為重要環(huán)節(jié),其布設(shè)需顧及測深線方向、相鄰測線間距、測線上測點(diǎn)間距、測深線布設(shè)的形狀等,這些因素制約著水底地形地貌是否能被完整且較經(jīng)濟(jì)的勘測成果。
1)測深線方向確定。測深線方向應(yīng)與所測區(qū)域水流方向一致,盡可能垂直于等深線的總方向,同時要綜合考慮測量工作的便利性,避免布設(shè)過多的短測線。
2)測深線間距確定。需同時顧及所測水域的重要性、水底地貌特征表示的精細(xì)程度要求、水深度、地貌起伏狀況、水底地質(zhì)等因素。對單波束測深儀,主測線間距為圖上1 cm,平坦水底可放寬為2 cm。需要詳細(xì)探測地貌復(fù)雜的區(qū)域,測深線間距變換比例尺大小進(jìn)行測量[13]。
3)測線上測點(diǎn)間距確定。測線上測點(diǎn)間距確定一般根據(jù)測線上水底地形起伏情況,盡可能捕捉到地形的細(xì)微變化為宜,也不適宜設(shè)置過于密集的點(diǎn)間距,以免影響數(shù)據(jù)處理效率。在實(shí)際作業(yè)中,點(diǎn)間距設(shè)定有3種方式,分別為等距離測量、等時間間隔測量和手動測量,一般顧及點(diǎn)位分布的均勻性等距離測量方式使用較多,設(shè)置為1 m。
4)測深線布設(shè)方法確定。測深線主要分為主測深線、補(bǔ)充測深線和檢查測深線3類,其中補(bǔ)充測深線用于局部重要區(qū)域的加密測深,檢查線主要用于檢查測深與定位是否存在系統(tǒng)誤差或粗差,并以此衡量測深成果精度[14]。
常見的主測深線布設(shè)方法有:垂直水流軸線布設(shè)、與水流軸線成45°角布設(shè)、平行水流軸線布設(shè)、扇形布設(shè)、螺旋形布設(shè)等,如圖3所示。其中:圖3(a)情況一般為利用單波束測深儀進(jìn)行斷面測量時的布設(shè)方法;圖3(b)情況多為單波束測深儀測量檢查線的布設(shè)方法或?qū)ΚM窄航道進(jìn)行測量時采用的布設(shè)方法;圖3(c)一般為多波束水深測量的布線方式;圖3(d)此種布設(shè)方法多用在河道拐彎處,即彎曲河段;圖3(e)和圖3(f)此兩種布設(shè)方式一般適用島形或較寬廣的水面。實(shí)際施測時可根據(jù)測深儀的工作原理和河道形狀的不同選用不同的布設(shè)方法。

圖3 測深線布設(shè)方法
為了保證測深數(shù)據(jù)準(zhǔn)確度,應(yīng)在測前、測深期間及測后,進(jìn)行深度比對檢查。測深檢查線布設(shè)要求:檢查線的方向應(yīng)盡可能與主測深線垂直,均勻分布測深垂線應(yīng)在水位平緩地帶檢查主測深線,檢查線總長應(yīng)不少于主測深線總長的5%[13]。
2.4 單波束測深數(shù)據(jù)分析與處理
1)誤差改正。無人船單波束水深測量數(shù)據(jù)是按等距離或等時間間隔采集數(shù)據(jù),其精度主要由測點(diǎn)的測深精度和定位精度決定,影響其精度的因素主要有GNSS定位誤差、GNSS-RTK時延引起的誤差、受風(fēng)浪及船體操縱等因素引起的船體姿態(tài)不穩(wěn)定引起的傾斜誤差、船體吃水誤差、潮汐引起的誤差等,因此要得到高精度的水下測量高程結(jié)果,需要進(jìn)行相應(yīng)的改正。針對無人船在湖泊、水庫區(qū)域的測量,一般潮汐改正可忽略,滿足要求測量條件時,吃水改正數(shù)是常數(shù)。
2)異常值探測與處理。在實(shí)際測量過程中,由于水中雜質(zhì)、魚群、水草等的影響,波束在碰到此類障礙物時會發(fā)射,致使測得的結(jié)果存在“假數(shù)據(jù)”,即產(chǎn)生異常值,也稱為“噪聲”數(shù)據(jù),在進(jìn)行下步測量前,必須剔除此類異常數(shù)值。目前有很多異常數(shù)據(jù)的探測方法,如多項(xiàng)式擬合法、差值法等,此類方法共同點(diǎn)均需設(shè)置閾值,以使水下測量數(shù)據(jù)均能取得良好的探測效果。
3)三維坐標(biāo)系統(tǒng)轉(zhuǎn)換。基于WGS84或CGCS2000坐標(biāo)系統(tǒng)獲取水下測量的數(shù)據(jù),在實(shí)際工作中一般要求采用1985年國家高程基準(zhǔn)坐標(biāo)系,因此需要對數(shù)據(jù)進(jìn)行坐標(biāo)系統(tǒng)轉(zhuǎn)換。通常在工程測量中,GNSS測量會聯(lián)測當(dāng)?shù)氐腃ORS系統(tǒng),通常采用CGCS2000坐標(biāo)系,若未聯(lián)測CORS站,則需聯(lián)測CGCS2000控制點(diǎn),將WGS84坐標(biāo)轉(zhuǎn)換為CGCS2000坐標(biāo)系。對于大地高程轉(zhuǎn)換到1985高程基準(zhǔn)坐標(biāo),可以采用高精度的似大地水準(zhǔn)面精化模型。
2.5 水深數(shù)據(jù)精度檢驗(yàn)
水深數(shù)據(jù)的精度直接關(guān)系水下DEM成果,必須進(jìn)行精度檢核,其檢核方法為重復(fù)斷面測量提取重合點(diǎn)或主測深線與檢查線提取交叉點(diǎn),通過計(jì)算重合點(diǎn)或交叉點(diǎn)之間的差值來評價(jià)其測量精度,此種方法是一種自檢核查方法。水下地形測量不同于陸地測量,同一點(diǎn)同時進(jìn)行兩次觀測的幾率非常小,所謂的重合點(diǎn)或交叉點(diǎn)并不是絕對意義上的同一個點(diǎn),需設(shè)定距離閾值,在閾值范圍之內(nèi)的點(diǎn)標(biāo)定為重合點(diǎn)或交叉點(diǎn),在實(shí)際計(jì)算時,可通過式(2)計(jì)算其內(nèi)符合精度。
(2)
式中:M為內(nèi)符合精度,m;Δ為重合點(diǎn)或交叉點(diǎn)高程差值;n為有效交叉點(diǎn)個數(shù)。
針對符合精度大于3倍中誤差的交叉點(diǎn),若該點(diǎn)是由于附近地形變化劇烈引起的,可不參與精度計(jì)算,但未參加計(jì)算的交叉點(diǎn)個數(shù)不得超過總交叉點(diǎn)個數(shù)的5%[15]。
2.6 水下DEM制作
單波束測深儀主要適用于河道斷面測量,測深儀沿布設(shè)的測線采取單點(diǎn)連續(xù)的測量方法,由此種作業(yè)模式和方法獲取的測深數(shù)據(jù)呈現(xiàn)出沿航跡數(shù)據(jù)十分密集,而在測線間沒有數(shù)據(jù)的特點(diǎn)。在數(shù)據(jù)處理成圖過程中,為解決測深數(shù)據(jù)分布不均問題,一般采用數(shù)據(jù)網(wǎng)格化內(nèi)插方法來預(yù)測測線間數(shù)據(jù)空白區(qū)的水深變化情況和趨勢[16-17]。在進(jìn)行數(shù)據(jù)內(nèi)插處理時,需分析地形變化趨勢,對于地形變化平緩的區(qū)域可選擇曲面擬合的方法,對于地形突變的地方,如河道的溝、坎處要沿溝坎方向進(jìn)行線性擬合。
對數(shù)據(jù)經(jīng)過內(nèi)插處理后,即可利用軟件構(gòu)建不規(guī)則三角網(wǎng)。構(gòu)建不規(guī)則三角網(wǎng)時,首先根據(jù)三維測點(diǎn)數(shù)據(jù)所呈現(xiàn)的地形走勢勾劃地形特征線。然后對三角網(wǎng)內(nèi)地形突變處的溝坎區(qū)域、測區(qū)邊界等合理性進(jìn)行檢查,檢查原則是確保每一個三角形都是坡頂(角)線上相鄰兩點(diǎn)連接坡腳(頂)線上對應(yīng)一點(diǎn),避免由于三角網(wǎng)不合理產(chǎn)生的數(shù)字地形模型與實(shí)際地形不符;若不規(guī)則三角網(wǎng)構(gòu)建合理后即可按照要求輸出。
2.7 水下DEM精度評定
水下測量的特殊性,無法以人工測量的方式在水底進(jìn)行RTK測量,借助搭載RTK設(shè)備和測深儀的無人船進(jìn)行高程測量,完成水下DEM的精度評定。水下DEM精度評定包括內(nèi)符合精度和外符合精度。內(nèi)符合精度通過參與水下DEM制作的測點(diǎn)高程與DEM中該點(diǎn)的高程比較來統(tǒng)計(jì)DEM精度;外符合精度則需通過無人船完成點(diǎn)位測量,為了評定結(jié)果更加可靠,可在測區(qū)均勻選取多個區(qū)域,每平方千米應(yīng)不少于15塊面積為1 m2的區(qū)域,利用無人船在每一塊區(qū)域進(jìn)行定點(diǎn)測量,測量次數(shù)不少于10次,取平均值作為該區(qū)域的測量高程值,利用似大地水準(zhǔn)面模型轉(zhuǎn)換為1985年國家高程基準(zhǔn)坐標(biāo)系,然后與DEM區(qū)域的高程值做比較,進(jìn)而可以統(tǒng)計(jì)其外符合精度。在相鄰測線間選取的區(qū)域塊,是DEM精度較弱的區(qū)域,其計(jì)算的精度更能反映DEM真實(shí)情況。
3 應(yīng)用實(shí)例與分析
3.1 實(shí)例概況
以測量山西省某水庫水下地形為例,采用華測華微3號無人測量船系統(tǒng)水下地形測繪,搭載單波束測深儀和GNSS-RTK設(shè)備,所有設(shè)備均在有效期內(nèi)。圖4為該水庫庫區(qū)的數(shù)字正射影像圖,其中紅線區(qū)域?yàn)槭y水域,水庫長度約5.8 km,最寬處約600 m,水深最深處約37 m。施測日期為2020年5月,實(shí)測天數(shù)10 d,施測水域面積約2 km2。

圖4 水庫庫區(qū)DOM
3.2 精度指標(biāo)
1)水深測量中,測圖時定位點(diǎn)的平面位置中誤差2 m。
2)在水深測量中,深度測量中誤差按《無人船水下地形測量技術(shù)規(guī)程》(CH/T 7002-2018)要求執(zhí)行,即測深范圍Z∈(0,20] m時,極限誤差為±0.2 m;測深范圍Z∈(20,30] m時,極限誤差為±0.3 m;測深范圍Z∈(30,100] m時,極限誤差為±Z×1% m。
3)測深檢查線與主測深線相交處、單波束測深不同作業(yè)組相鄰測段或同一作業(yè)組不同時期相鄰測深段的重復(fù)測深線的重合點(diǎn)處,水深H≤10 m時,深度比對互查應(yīng)不大于0.4 m;水深H>10 m時,深度比對互查應(yīng)不大于0.04 m,重合點(diǎn)間距應(yīng)在2 m內(nèi),且深度比對的超限點(diǎn)數(shù)應(yīng)不超過參加比對點(diǎn)數(shù)的25%[18]。
3.3 測線水域范圍確定
通過實(shí)地踏勘,該水庫距離水域邊界0.5 m處基本上滿足無人船施測要求。因此,水域范圍線最終采用無人船測量系統(tǒng)測量的方法確定該水庫的水域施測范圍。
3.4 測線布設(shè)與施測
觀測點(diǎn)和插值點(diǎn)影響布設(shè)結(jié)果的準(zhǔn)確度,測線間距選擇過窄,雖然保證了測量數(shù)據(jù)精度,但會增加采集工作量、降低工作效率;測線間距選擇過寬,插值點(diǎn)的精度會降低,難以保證測量數(shù)據(jù)精準(zhǔn)性[19]。經(jīng)綜合分析,測區(qū)主縱線沿河道走向布設(shè),測線間距布設(shè)為20 m,測點(diǎn)間距設(shè)置為1 m。檢查線布設(shè)垂直于主測線,不少于2條。圖5為該水庫無人船水下測量航跡圖,實(shí)測共采集點(diǎn)數(shù)107 920個點(diǎn)。

圖5 水庫庫區(qū)無人船水下測量航跡
3.5 水深數(shù)據(jù)精度檢核
首先將采集到的數(shù)據(jù)進(jìn)行無人船吃水改正和數(shù)據(jù)的濾波處理,然后通過提取重復(fù)斷面上的重合點(diǎn)以及檢查線與主測深線的交叉點(diǎn)來進(jìn)行精度檢核。
本實(shí)例中重復(fù)測線上測點(diǎn)間距小于0.5 m的測點(diǎn)為重合點(diǎn);測深檢查線與主測深線相交處測點(diǎn)間距在1.0 m內(nèi)的測點(diǎn)為重合點(diǎn),經(jīng)搜索得到滿足條件的檢查點(diǎn)數(shù)為7 990,參與精度評定的點(diǎn)數(shù)為7 228個,計(jì)算得高程中誤差為0.116 m,超限點(diǎn)數(shù)762,超限比例為9.54%,滿足超限點(diǎn)數(shù)不超過參加比對點(diǎn)數(shù)的25%的要求。
為了進(jìn)一步檢核水深數(shù)據(jù)的正確性,選擇一條測線往返測了3次,即一條測線測了6次。測線長約185 m,測點(diǎn)間距1 m,每一次斷面測量點(diǎn)數(shù)為185個點(diǎn),為了比較測量精度,選擇兩次往返測量平面位置最近的兩個點(diǎn)作為重合點(diǎn)比較。圖6和圖7分別為測線上重合點(diǎn)水平間距和垂直間距比較,從圖6和圖7中可以看出水平間距最大不超過0.35 m,垂直間距均在0.10 m以內(nèi),可見測深精度相對穩(wěn)定,且精度較高。在實(shí)際測量過程中,會存在測點(diǎn)位置恰好將聲波傳到水中漂浮物后被反射的現(xiàn)象,這時測出的水深失真,測點(diǎn)數(shù)據(jù)突變,這時應(yīng)根據(jù)該測點(diǎn)前后數(shù)據(jù)合理分析是否為噪點(diǎn),若是噪點(diǎn)應(yīng)剔除該測點(diǎn)數(shù)據(jù);若為真實(shí)地形變化則應(yīng)保留。

圖6 測線重合點(diǎn)水平間距比較
另外,為了檢驗(yàn)該無人船水深測量精度的穩(wěn)定性也進(jìn)行了相應(yīng)的試驗(yàn)工作,即在該水庫某一區(qū)域進(jìn)行定點(diǎn)重復(fù)測量,設(shè)置等時間間隔為1 s的數(shù)據(jù)采集,共采集153個數(shù)據(jù),如圖8所示,由于測量時受水面微風(fēng)以及水流的影像,無人船不可能完全靜止不動,因此測點(diǎn)數(shù)據(jù)平面位置分布在邊長為2 m的區(qū)域內(nèi),圖8中的橫縱坐標(biāo)值進(jìn)行常數(shù)平移處理。圖9所示為每個測點(diǎn)的水深數(shù)據(jù),從圖8中可看出水深值分布在[1.37,1.71] m之間,經(jīng)統(tǒng)計(jì)計(jì)算其平均水深值為1.57 m,中誤差為0.09 m,由此可見該無人船在此水域的測量精度很穩(wěn)定,可以保障測量結(jié)果的準(zhǔn)確性。
3.6 水下DEM制作
水深數(shù)據(jù)精度滿足規(guī)范和工程設(shè)計(jì)要求,然后按照“點(diǎn)號、經(jīng)度、緯度、水底大地高”格式整理為文本文件。
由于采集到的坐標(biāo)數(shù)據(jù),為WGS84坐標(biāo)系下的大地高程,轉(zhuǎn)換為1985年國家高程基準(zhǔn)坐標(biāo)系下的數(shù)據(jù),將WGS84坐標(biāo)系的大地坐標(biāo)轉(zhuǎn)換為CGCS2000坐標(biāo)系下的平面坐標(biāo)。最后利用GIS軟件導(dǎo)入坐標(biāo)轉(zhuǎn)換數(shù)據(jù),進(jìn)行展點(diǎn)操作、插值處理、構(gòu)建TIN,最后生成DEM成果。
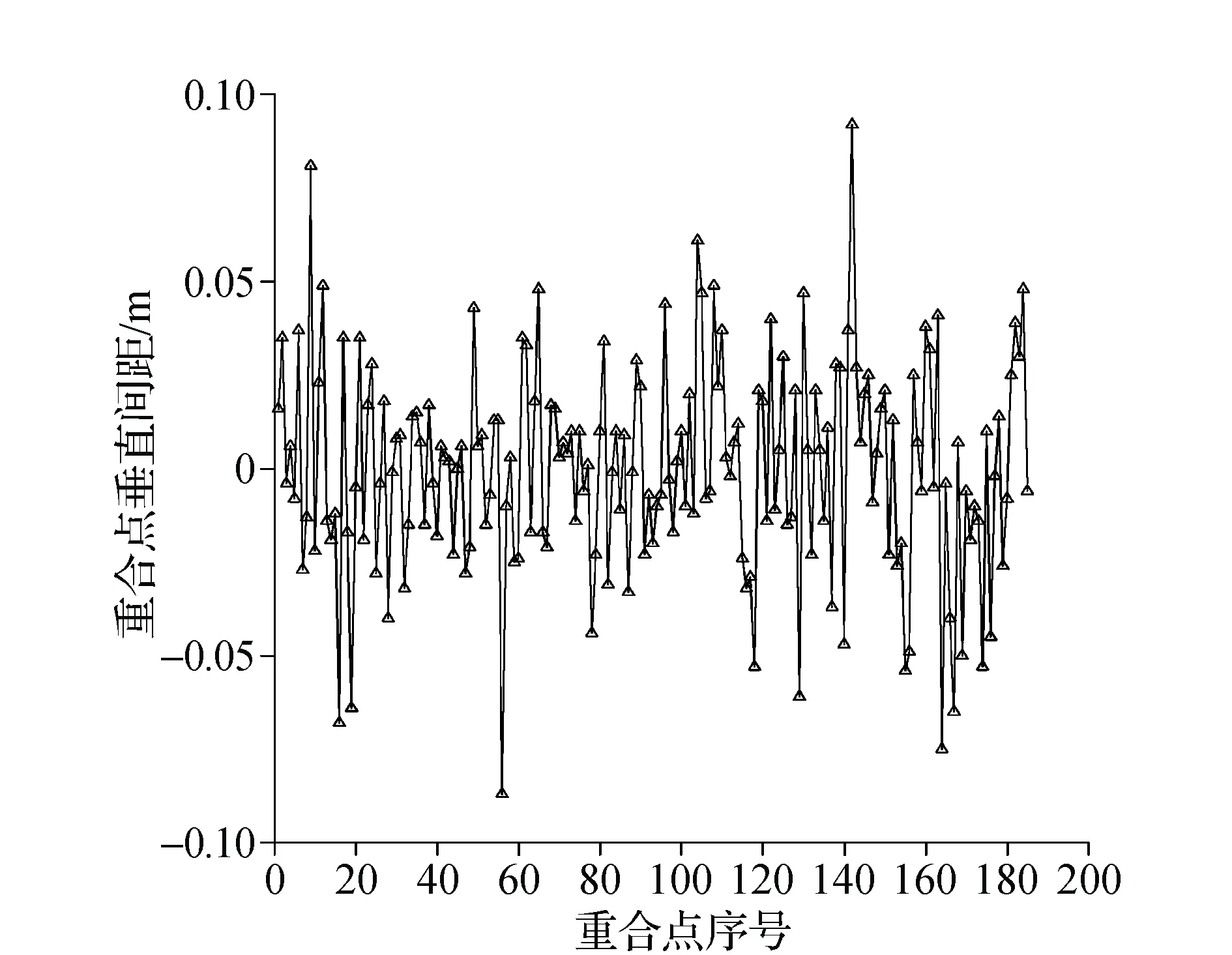
圖7 測線重合點(diǎn)垂直間距比較
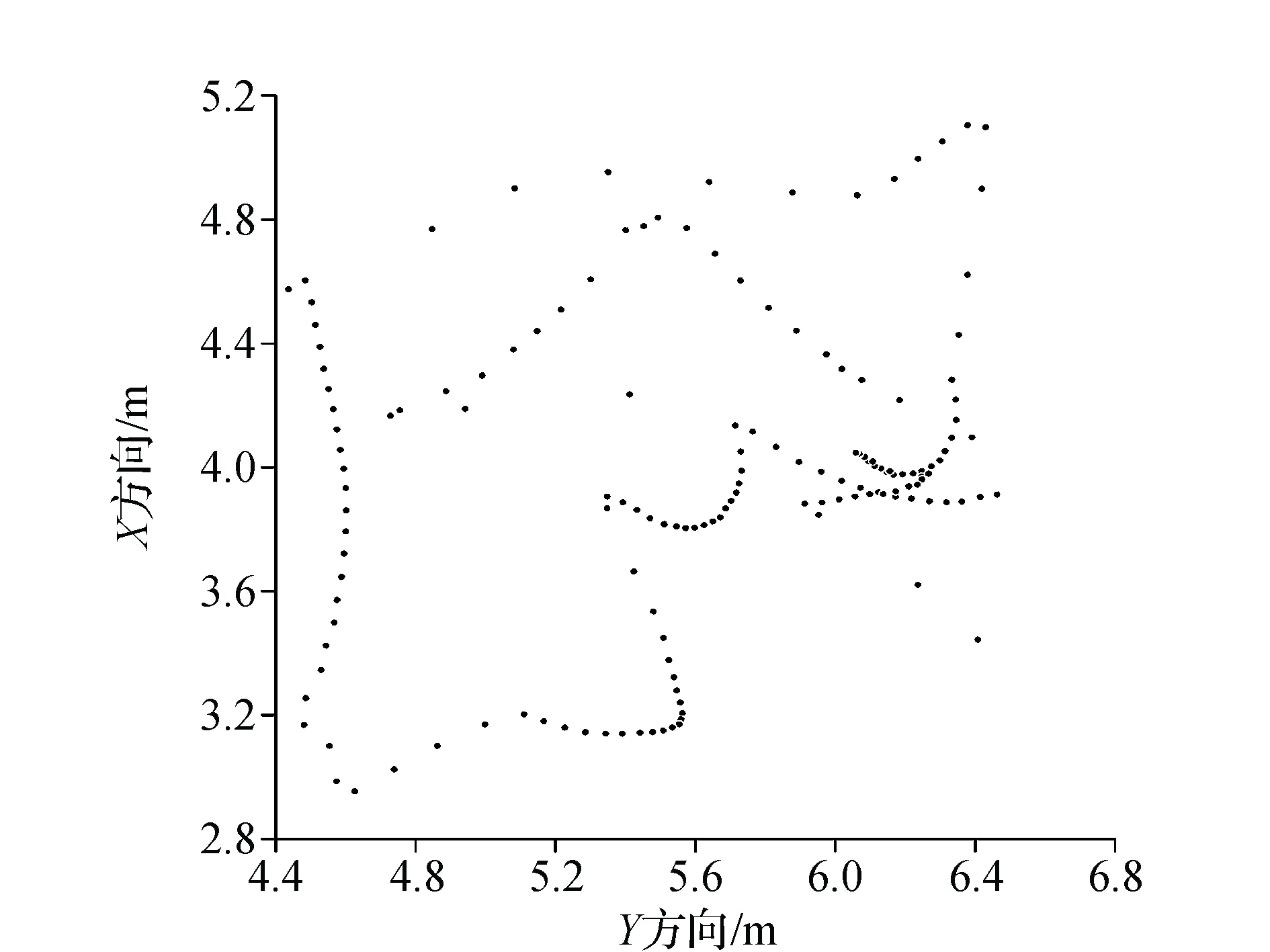
圖8 定點(diǎn)重復(fù)測量平面位置分布
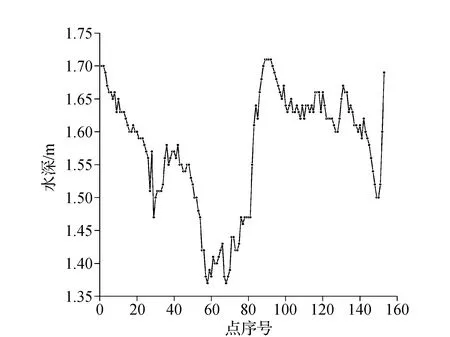
圖9 定點(diǎn)重復(fù)測量水深數(shù)據(jù)分布
由于該水庫水下測量設(shè)置測線間距為20 m,測點(diǎn)間距為1 m,測點(diǎn)數(shù)據(jù)分布極為不均勻,若直接進(jìn)行TIN構(gòu)建,其不規(guī)則三角網(wǎng)形狀嚴(yán)重不滿足三邊近似相等的要求,因此需進(jìn)行內(nèi)插處理。常見的空間內(nèi)插模型主要有樣條函數(shù)法、反距離加權(quán)插值、普通克里金插值、自然鄰域法等,通過對幾種插值方法的比較分析,最終采用普通克里金插值法進(jìn)行插值處理,然后構(gòu)建TIN。在構(gòu)建TIN時,根據(jù)所測三維水下測點(diǎn)數(shù)據(jù)分析其地形突變處,識別此類地貌后合理繪制地形特征線,作為約束條件限制不合理的TIN構(gòu)建,TIN中存在不合理三角形,可修復(fù)TIN邊線和處理長邊,確保三角網(wǎng)中每一個三角形為近似等邊三角形,避免出現(xiàn)鈍角三角形或角度小于20°的銳角三角形。圖10為插值處理后構(gòu)建的TIN模型,圖11為TIN模型局部放大圖。最后利用GIS軟件根據(jù)構(gòu)建的合理的TIN模型生成本文試驗(yàn)區(qū)的水下DEM成果,DEM分辨率設(shè)為2.0 m,圖12為DEM成果圖,從圖12中明顯可以看出該水庫水底地形情況,中間藍(lán)色區(qū)域?yàn)樗畮熳钌钐帲矣杀毕蚰系貏葜饾u升高。
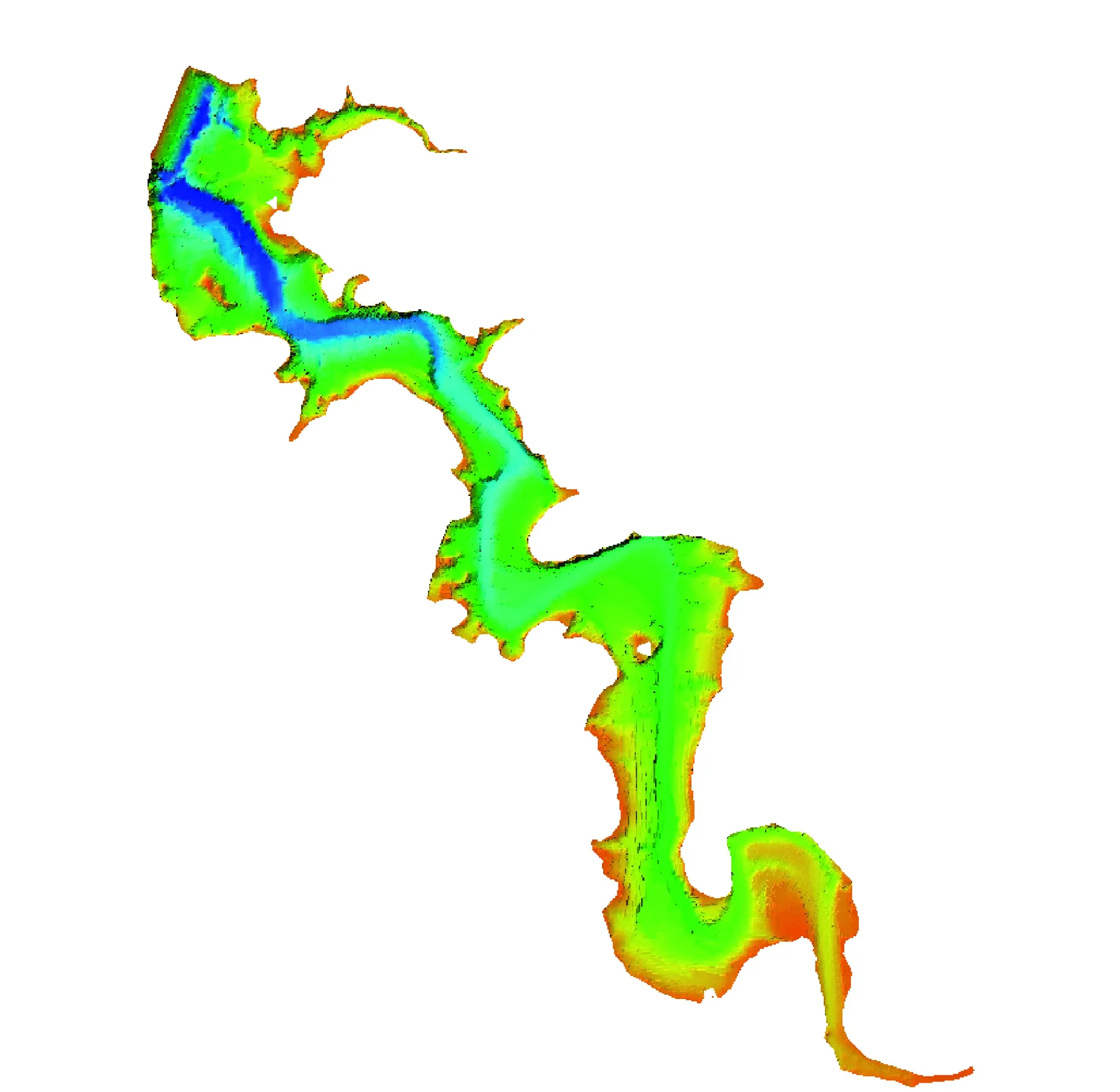
圖10 構(gòu)建TIN模型(全局圖)
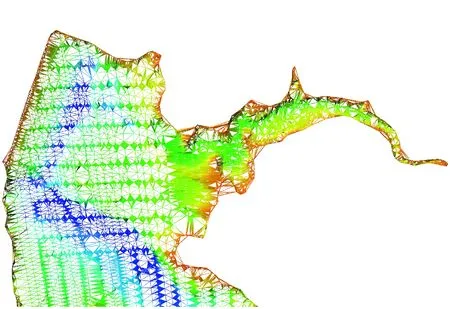
圖11 插值處理后構(gòu)建TIN(局部放大圖)
4 結(jié) 論
文中詳細(xì)闡述了智能無人船搭載單波束水下測量系統(tǒng)在河湖庫區(qū)水下測量的過程,并詳細(xì)分析了測量過程與數(shù)據(jù)處理各個環(huán)節(jié)的關(guān)鍵技術(shù)和注意事項(xiàng)。
1)根據(jù)無人船單波束測深系統(tǒng)的特性,主要適用于水下地形斷面測量,該技術(shù)可以較完善地表現(xiàn)水底地形,但航線布設(shè)是難點(diǎn),過寬的測線間距設(shè)計(jì)會忽略掉微地形的變化,而且在后續(xù)TIN構(gòu)建時會增加數(shù)據(jù)處理的難度,同時也會影響最終DEM成果的精度;而過窄的測線間距又會極大地增加外業(yè)數(shù)據(jù)獲取的工作量,降低工作效率,因此在實(shí)際測線布設(shè)中綜合考慮成果精度和工作效率是一件較為困難的事情,條件允許情況下,要采集高精度的水下地形數(shù)據(jù)可使用多波束測深儀。
2)利用單波束測深儀進(jìn)行水下地形數(shù)據(jù)采集時,測線間距與測點(diǎn)間距的嚴(yán)重不相符,導(dǎo)致構(gòu)建的TIN形狀不佳,必須進(jìn)行空間插值處理,但空間插值又會引進(jìn)插值誤差,需根據(jù)原始采集數(shù)據(jù)預(yù)先分析水底地形走勢,然后合理劃分區(qū)域,采用插值模型,提高插值精度的同時地形走勢更平滑、自然。
3)在水下測量中采用無人船測量方式,會出現(xiàn)無人船擱淺或被水草等障礙物阻擋無法施測問題,此種情況設(shè)計(jì)研發(fā)了避障功能的無人船,但是該技術(shù)還不是很成熟,會有判斷失誤的情況,因此最好的方式還是要在施測前進(jìn)行測區(qū)踏勘,標(biāo)注障礙區(qū)域以規(guī)避這一風(fēng)險(xiǎn)發(fā)生。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00