一種秋刀魚的導向裝置的設計與參數優化
2023-02-03 08:51:04陳成明余世龍朱清澄花傳祥上官春霞
制造業自動化 2023年1期
陳成明,余世龍,朱清澄,花傳祥,,上官春霞
(1.上海海洋大學 工程學院,上海 201306;2.上海海洋大學 海洋科學學院,上海 201306)
0 引言
秋刀魚是遠洋漁業重要的捕撈對象之一,近五年其總捕獲量在35萬~60萬噸[1]。但與國外相比,國內秋刀魚的加工技術較落后,存在著基礎研究薄弱,生產效率較低等問題[2]。前處理加工技術是魚類加工技術的首要和關鍵環節,主要包括:導向、分級、去鱗去內臟等關鍵步驟[3]。其中分級、去鱗去內臟等技術發展迅速[4~7]。但在秋刀魚進行分級、去鱗去內臟之前,必須對秋刀魚進行導向處理,即將姿勢各異的秋刀魚按照一定的規律調整,然后逐條進入加工設備。國外的相關學者和企業研究較多的是與一些魚類加工生產線相匹配的導向裝置。Badder公司制造的481型自動加料機[8],結合魚的背部與腹部在外力的擠壓下變形差異的特征,在驅動壓輪與壓板的擠壓下進行導向處理;Marel公司[9]設計了一種魚體腹背導向分揀生產線,其中利用魚體頭部剛度較大這一特性,腹背導向機構和翻轉機構共同作用實現魚體腹背導向;Pegoraro等[10]設計了一種傳感器與機械結構相結合的魚體導向裝置,利用傳感器檢測魚體姿勢,配合機械機構,實現魚體導向功能;Knyszewki等[11]通過高低振動平臺與有傾斜角度的漸縮通道的配合,將細棘長吻魚魚體進行導向處理。目前我國的分離導向裝置發展相對較緩慢。魯力等人[12]利用魚的重心特點及順鱗摩擦角之間的關系,設計了振動臺對魚進行姿勢調整并進行排序;徐頌波等人[13]根據魚頭魚尾之間的剛度不同,利用在同一壓力下產生不同的彎曲形變,進而對魚體進行導向;萬鵬等人[14]以利用魚體腹背受力擠壓的特性以及魚體近似為楔形的腹部橫截面結構特點,提出了一種魚體的導向方法;高星星等人[15,16]探討了振動平臺結構及振動工藝參數對魚體定向的影響,為魚體振動定向裝置的研發提供理論依據。綜上,國外研究的分離導向設備主要針對海水魚,但由于每一種海水魚的體型差異較大,目前國外研究沒有適合于秋刀魚的分離導向設備;國內研究的分離導向設備主要基于淡水魚結構特征,例如鯽魚的腹部橫截面近似為楔形、魚頭魚尾具有不同的剛度等,進而利用振動原理和有傾角的漸變滑道,對淡水魚進行分離導向。但國內的設備在分離導向時過多依賴于重力和傾斜角度,極易堵塞。因此有必要設計一種適合秋刀魚的導向方法與設備。
為了解決秋刀魚導向困難的難題,本文以秋刀魚為研究對象,基于雙導向輪的力學特性下,根據秋刀魚的物理結構特性,設計并試驗了一種適合于秋刀魚導向的裝置。以魚體損傷量和總時間作為評價指標,進行了單因素試驗和3因素5水平的正交實驗。最終確定裝置的最優工作參數,并進行最優參數樣機試驗,最終確定最優工作參數。為秋刀魚分離導向裝置研發提供理論依據和技術參考。
1 裝置整體結構與工作原理
1.1 裝置整體結構
秋刀魚導向裝置主要是由分離機構、導向機構、限位組件、機架、電機、輸送帶等部件組成。分離機構主要包括分離漏斗、電磁振動器、滑筒;導向機構主要包括帶輪電動機、皮帶、皮帶支架。裝置整體結構如圖1所示。
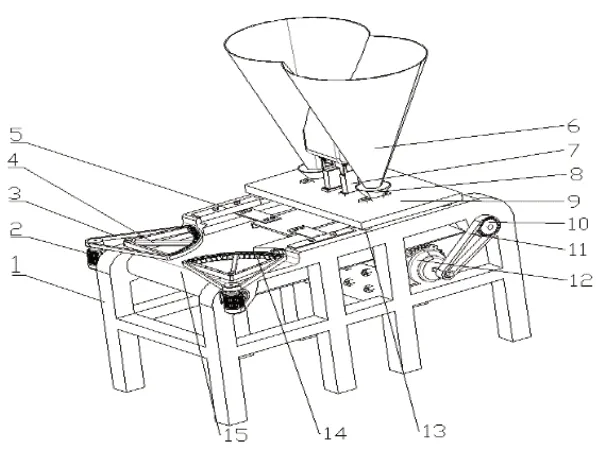
圖1 秋刀魚導向裝置示意圖
1.2 工作原理
工作時,該裝置通過工人將一定數目的秋刀魚倒入分離漏斗中,為了提高分離漏斗的效率,設計了雙漏嘴型漏斗。在電磁振動器作用下,秋刀魚從每個分離漏斗的底部逐條漏出,通過滑筒滑到輸送帶上,在限位組件的作用下,秋刀魚垂直地輸送到導向裝置處,導向裝置通過兩個帶輪電動機的帶動兩邊的皮帶進行差速轉動,通過兩皮帶對秋刀魚的摩擦力的不同,對秋刀魚進行導向作用。底板與機架之間有橡膠墊,橡膠墊有吸收振動的功效。
2 關鍵部件設計
2.1 秋刀魚的基本參數
秋刀魚的結構特征是設計分離導向裝置的重要參考之一。經統計分析,秋刀魚體長范圍是250±50mm,體寬范圍是40±10mm,平均重量在100~300g,截面圖呈橢圓形。
2.2 分離機構
分離機構是設計導向裝置的首要環節。如圖2所示,雙漏嘴型漏斗的兩個漏腔分界處的高度h必須大于或等于一條秋刀魚的長度,以便盡量減少振動過程中,在左右腔中的秋刀魚相互干擾,此處設計h為300mm;對于漏斗的傾斜角α,能保證秋刀魚不堵塞即可,設置為75°;對于漏嘴的直徑d,結合秋刀魚的體寬40±10mm,設置漏嘴的d直徑為40mm,此每個漏嘴的大小只能使一條秋刀魚通過;導向裝置的總高度,根據人因工程學的相關知識,在重體力工作時,男性的工作面的高度750~900mm,女性的工作面的高度700~850mm,考慮到男女性的綜合條件,確定為830mm[17,18]。
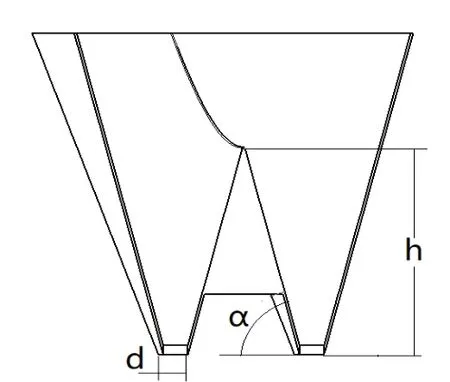
圖2 雙漏嘴型漏斗半剖圖
2.3 導向機構
導向機構是導向裝置的關鍵部件。如圖3所示,帶輪電動機5通過皮帶輪6帶動皮帶4轉動,皮帶4與皮帶支架3上的滾輪7接觸,秋刀魚通過接觸皮帶4,進行導向作用。導向機構要想工作在最佳狀態,工作參數要恰當。該機構的工作參數包括:左右兩個帶輪電動機的轉速、轉速比、兩導向輪之間的距離。通過三個因素的配合,能使導向效率最好。
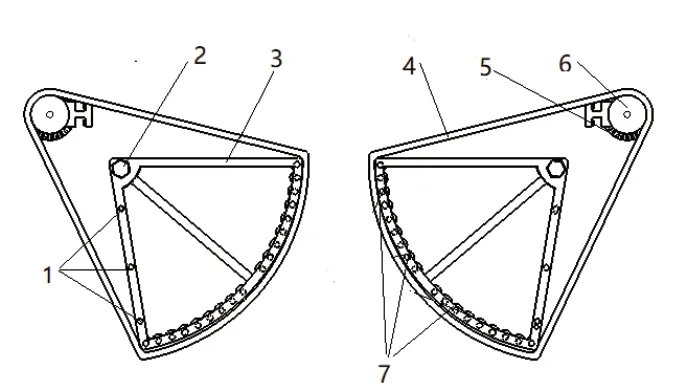
圖3 導向機構示意圖
2.3.1 導向機構的原理
導向機構的原理是基于秋刀魚的不同部位上的摩擦系數的不同,通過摩擦力對不同的秋刀魚進行導向作用。導向機構中的皮帶表面粗糙,起主要導向作用。產生摩擦的主要部位有皮帶表面與秋刀魚的頭部表面接觸處、皮帶表面與秋刀魚的魚體中部表面接觸處、皮帶表面與秋刀魚的魚體尾部表面接觸處、秋刀魚頭部表面與頭部表面接觸處、秋刀魚頭部表面與中部表面接觸處。由于皮帶表面粗糙、秋刀魚的頭部較堅硬、秋刀魚的魚體布滿魚鱗,較粗糙,所以各部分的摩擦系數關系有如下關系:

其中,
f1是皮帶表面與秋刀魚的魚體中部表面摩擦系數;
f2是皮帶表面與秋刀魚的魚體尾部表面摩擦系數;
f3是皮帶表面與秋刀魚魚體頭部表面摩擦系數;
f4是秋刀魚頭部表面與中部表面的摩擦系數;
f5是秋刀魚頭部表面與頭部表面的摩擦系數。
由于分離機構是雙漏斗型漏斗,出現在輸送帶上的兩條秋刀魚可能出現同一時刻進入導向裝置。此導向機構可以使每個秋刀魚逐一通過,且保證不能使兩個秋刀魚同時通過。由于兩導向輪的轉速不相等(這里假設w1>w2),所以分為三種情況:頭部與頭部接觸情況,如圖4(a)所示;頭部與中部接觸情況,如圖4(b)所示;頭部與尾部接觸情況,如圖4(c)所示。對于頭部與中部接觸情況,通過區分已經進入導向裝置的秋刀魚是否靠近高轉速導向輪,分為兩種情況:已經進入導向裝置的秋刀魚靠近低轉速輪,如圖4(b)所示;已經進入導向裝置的秋刀魚靠近高轉速輪,如圖5(b)所示。
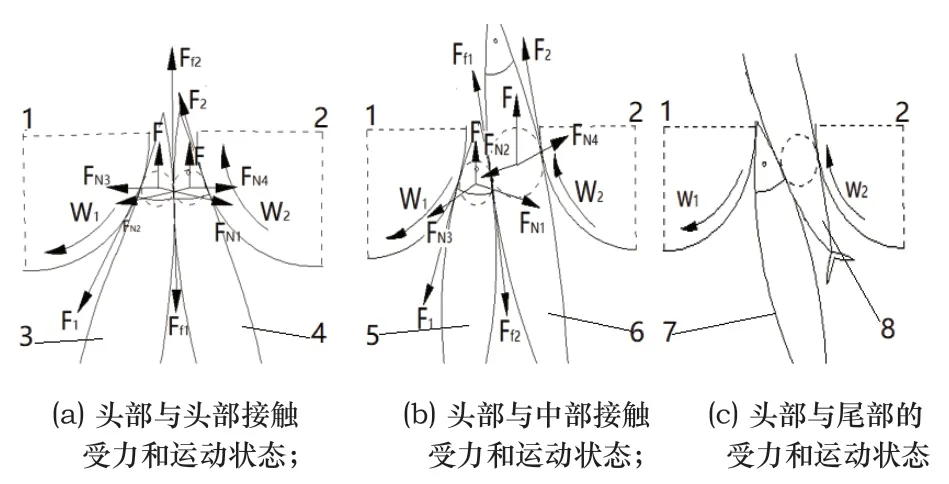
圖4 與轉速小的導向輪接觸的秋刀魚先導向圖
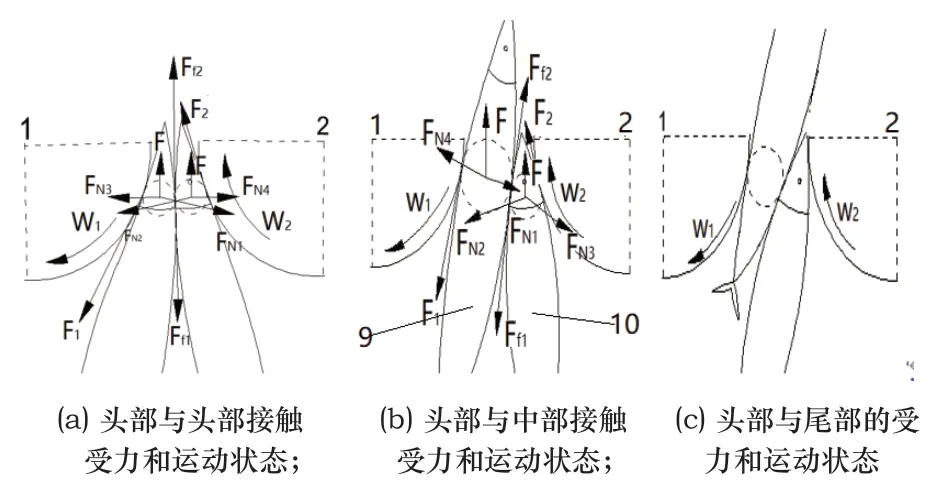
圖5 與轉速大的導向輪接觸的秋刀魚先導向圖
圖4、圖5中,1是轉速大的導向輪,2是轉速小的導向輪3、4、5、6、7、8、9、10是秋刀魚,秋刀魚與導向輪的接觸點與秋刀魚與秋刀魚的接觸點之間的線段作直徑畫圓,其圓心是轉動時的大致質心位置。r3、r4、r5、r10為秋刀魚的頭部接觸時圓的半徑,r6、r9為秋刀魚的中部接觸時圓的半徑,w1是導向輪轉速,w2是導向輪轉速,F1是導向輪1對秋刀魚的摩擦力,F2是導向輪2對秋刀魚的摩擦力,F是輸送帶對秋刀魚的摩擦力,FN1是導向輪對秋刀魚4的支持力,FN2是導向輪對秋刀魚3的支持力,FN3是秋刀魚3對秋刀魚4的支持力,FN4是秋刀魚4對秋刀魚3的支持力,在圖4(a)中,Ff2是秋刀魚4對秋刀魚3的摩擦力,Ff1是秋刀魚3對秋刀魚4的摩擦力,其他圖以此類推。
本文假設導向機構工作狀態理想,通過分析秋刀魚在導向機構中的受力情況和運動狀態來闡述導向過程[19]。
當頭部與頭部先接觸時進行導入機構時,兩端皮帶分別于秋刀魚的頭部接觸且一條秋刀魚的頭部與另一條秋刀魚的頭部接觸,如圖4(a)所示。秋刀魚3、秋刀魚4都有逆時鐘轉動的趨勢。秋刀魚3的轉矩M3和秋刀魚4的轉矩M4分別為:
此時轉矩M3、M4均大于零,所以秋刀魚3、秋刀魚4均逆時針轉動。在兩導向輪的帶動下,與轉速高的導向輪接觸的秋刀魚3先進行導向,接著秋刀魚4進行導向。
當一條秋刀魚的中部與頭部進入導向機構時且已經進入導向機構的秋刀魚靠近低轉速輪。兩端皮帶分別于秋刀魚的頭部和中部接觸且兩條秋刀魚的中部與頭部接觸,如圖4(b)所示。秋刀魚5、秋刀魚6有逆時鐘轉動的趨勢。秋刀魚5的轉矩M5和秋刀魚6的轉矩M6分別為:

由上公式得,M5、M6均大于零,秋刀魚5、秋刀魚6有逆時鐘轉動的趨勢。綜上述所,秋刀魚6先進行導向,接著秋刀魚5再進行導向。
當一條秋刀魚的中部與頭部進入導向機構時且已經進入導向機構的秋刀魚靠近高轉速輪。兩端皮帶分別于秋刀魚的頭部和中部接觸且兩條秋刀魚的中部與頭部接觸,如圖5(b)所示。秋刀魚9、秋刀魚10有順時鐘轉動的趨勢。秋刀魚9的轉矩M9和秋刀魚10的轉矩M10分別為:
由于f1>f3>f4,有F2>Ff2且有F1>Ff1,此時轉矩M9、M10均大于零,秋刀魚9、秋刀魚10有順時鐘轉動的趨勢。在兩導向輪的帶動下,秋刀魚9先進行導向,接著秋刀魚10進行導向。
當一條秋刀魚的尾部與頭部進入導向裝置時,如圖4(c)所示。由于f1=f2,此種情況秋刀魚7、秋刀魚8所受力和轉矩情況分別于圖4(b)所示秋刀魚5、秋刀魚6相同。秋刀魚7、秋刀魚8均逆時針轉動的趨勢且秋刀魚8前進的動力主要是輸送帶的摩擦力,導向裝置不會發生堵塞。同理,圖5(c)所示的情況也不會堵塞。
綜上所述,當導向裝置工作在理想狀況下,無論是哪種情況,兩條秋刀魚都不會在導向裝置的位置處發生堵塞。
通過分析發現,導向輪的速度對導向裝置的影響最大。當轉速較大時,導向輪對秋刀魚的摩擦力F1越大,秋刀魚在導向時出現打滑現象裝置,若轉速繼續增加,秋刀魚會被甩出裝置;當速度過小時,導向時間過長,容易產生堵塞。兩導向輪的轉速比也對導向效果有影響,當轉速比過大時,秋刀魚與輸送帶接觸不充分,秋刀魚會出現搖擺現象;當速度比過小時,導向效果不明顯,導向時間長。兩導向輪之間的間距主要影響受力圓半徑的大小,從而影響到轉矩的力臂,然而當間距過大時,不能達到秋刀魚逐一通過的效果。綜上所述,確定導向機構的最佳參數,有利于達到最佳的導向效果。
2.3.2 基于預實驗確定主要參數范圍
影響導向機構的主要參數有:導向輪的轉速、導向輪的轉速比、導向輪間距,以總時間和魚體損傷量為指標,進行預實驗。根據預實驗發現,當由于轉速超過85 r?min-1,秋刀魚出現打滑和失去穩定性現象,導向總時間增加,魚體損傷量隨著轉速的增加而逐漸增加。當轉速低于45r?min-1時,秋刀魚不進行導向,產生堵塞現象,所以轉速的范圍能確定為45r?min-1~85r?min-1;當兩導向輪之間的間距大于57mm時秋刀魚不能達到逐一通過的效果,同時當間距小于45mm時,秋刀魚易產生堵塞,即間距的范圍為45mm~57mm;當轉速比低于1.3時,導向效果不明顯,當轉速比大于2.5時,秋刀魚易發生劇烈抖動,失去穩定性。即轉速比的范圍為1.3~2.5。
3 單因素試驗
3.1 試驗對象
隨機選取100條秋刀魚進行試驗。其選中的秋刀魚體長范圍:250±50mm,體寬范圍:40±10mm,重量范圍在100g~300g。
3.2 試驗方法
以導向輪轉速、兩導向輪轉速比、導向輪間距等為自變量,以秋刀魚單體輸送效果(總時間、魚體損傷量)為評價指標,控制變量法進行試驗,試驗方案如下:
1)將間距等分成45mm,48mm,51mm,54mm,57mm五組,轉速設置為60r?min-1,轉速比設置為1.8,進行試驗,記錄總時間和魚體損傷量;
2)將轉速比等分成1.3,1.6,1.9,2.2,2.5五組,間距設置為50mm,轉速設置為60r?min-1,記錄總時間和魚體損傷量;
3)將轉速等分成45r?min-1,55r?min-1,65r?min-1,75r?min-1,85r?min-1五組,間距設置為50mm,轉速比設置為1.8,進行試驗,記錄總時間和魚體損傷量。
分別進行三組試驗,探究各因素對單體輸送效果的影響。
3.3 實驗結果
通過excel對數據進行統計,得到間距、轉速比、轉速對單體輸送效果的影響趨勢圖。
如圖6所示,不同間距對單體輸送效果有影響。隨著間距地增大,總時間逐漸減少,在間距為51mm處總時間達到最小值234s,此時魚體損傷量為6條。隨著間距繼續增大,總時間值處于穩定狀態,魚體損傷量隨著間距的增加,魚體損傷量逐漸減少,最后趨向于穩定狀態。
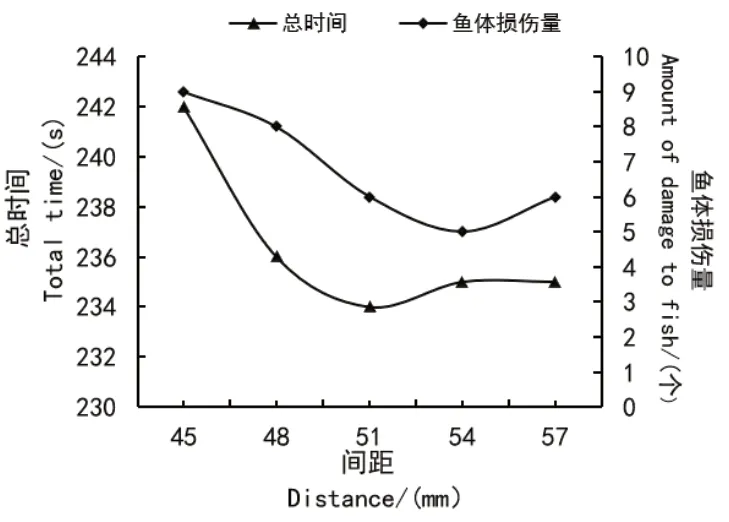
圖6 間距對單體輸送效果的關系圖
如圖7所示,不同轉速比對單體輸送效果有影響。隨著轉速比地增大,總時間逐漸減少,在轉速比為1.9處,總時間達到最小值238s,此時魚體損傷量為13條。隨著轉速比繼續增大,秋刀魚失去穩定性現象,總時間增加較快;魚體損傷量隨著轉速比增加而增加。
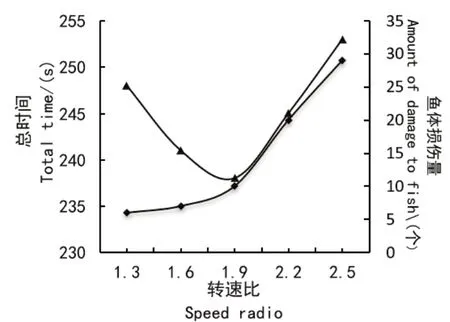
圖7 轉速比對單體輸送效果的關系圖
如圖8所示,不同轉速對單體輸送效果有影響。隨著轉速地增加,總時間逐漸減少,在65r?min-1達到最小值,此時的總時間為238s,魚體損傷量為7條。轉速繼續增加后,導致秋刀魚出現打滑和失去穩定性現象,總時間增加,魚體損傷量增加。
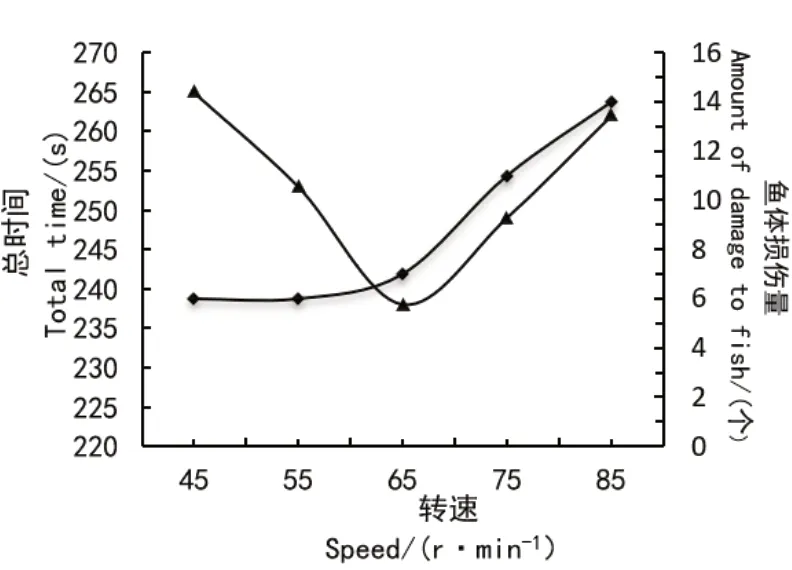
圖8 轉速比對單體輸送效果的關系圖
4 正交試驗
利用design expert8.1對實驗數據二次通用旋轉組合實驗設計和進行顯著性分析[22,23]。以不同轉速,不同間距,不同轉速比作為自變量,以單體輸送效果作為評價指標,實際3因素5水平的正交實驗。觀察各自變量及交互作用對評價指標的影響,并確定最佳匹配參數,編碼如表1所示。
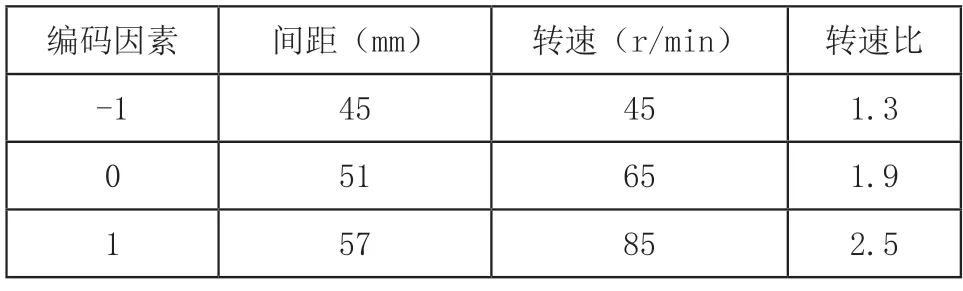
表1 編碼水平表
通過design expert的設計,共有產生17組試驗,每組試驗隨機選取100條秋刀魚,記錄每組試驗的單體輸送效果,如表2所示,得到正交試驗結果,如表3所示。
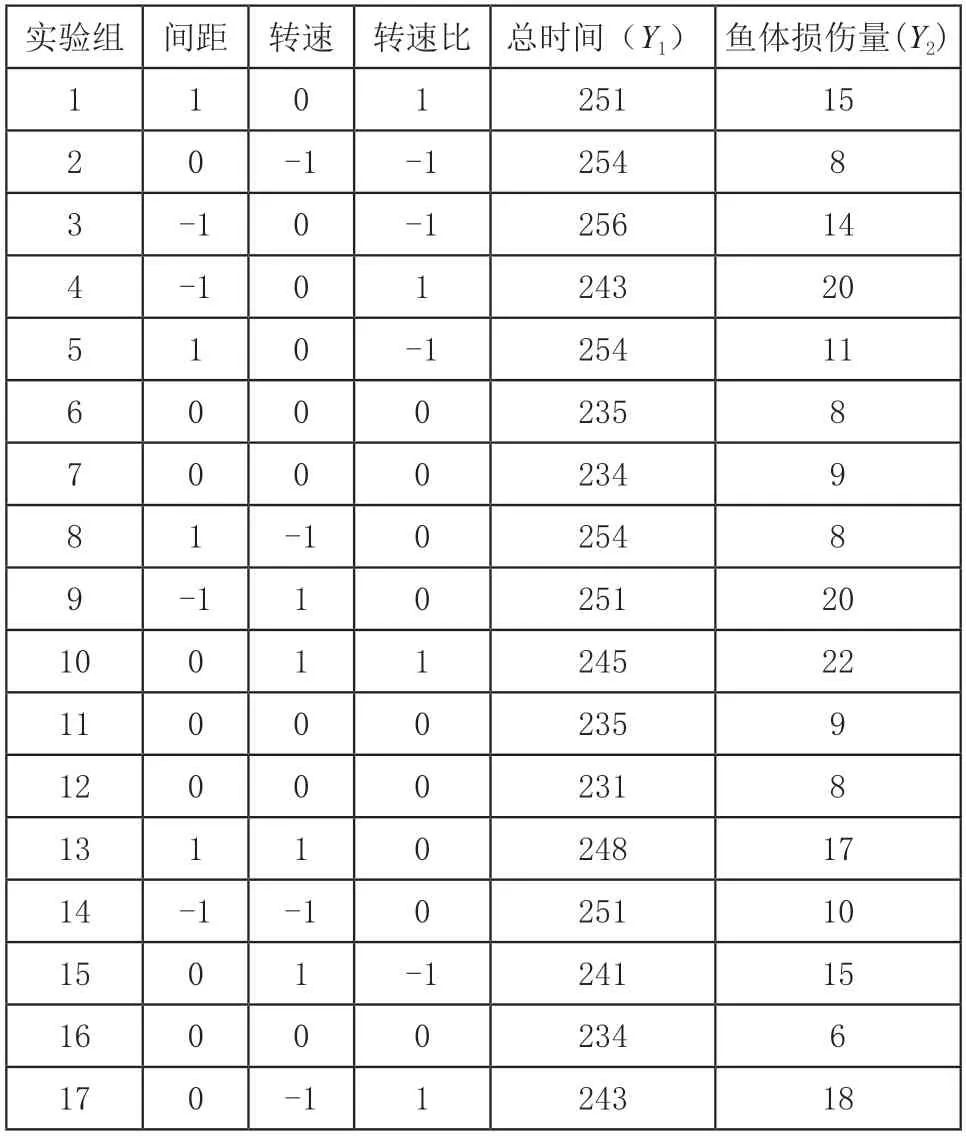
表2 正交試驗設計與數據表
4.1 回歸分析
通過對數據的響應面回歸分析,最終可得到總時間和魚體損傷量方差分析表(表3)并得到總時間Y1,魚體損傷量Y2與間距A,轉速比B,轉速C的回歸方程為:
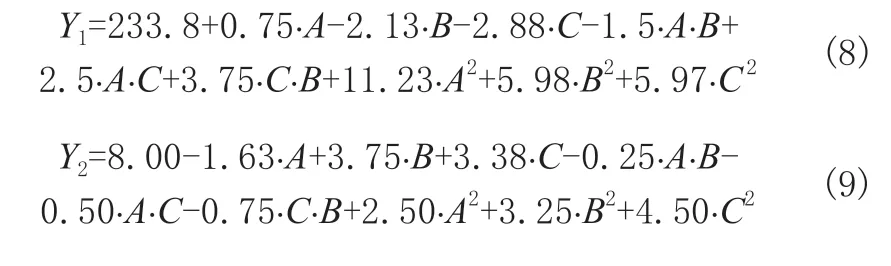
其中Y1回歸模型的P<0.01,有極顯著性,失擬項F=0.2316>0.05,無顯著性,模型決定因數R2=0.9750;其中Y2回歸模型的P<0.01,有極顯著性,失擬項F=0.1346>0.05,無顯著性,模型決定因數R2=0.9497。綜上所述,轉速、轉速比、間距對總時間和魚體損傷量的影響都達到極顯著水平(P<0.01),但失擬項不顯著(F>0.05),表面一定范圍內回歸模型與實際情況擬合度較高。
由于皮帶是橡膠材料,導向時與秋刀魚接觸對秋刀魚的損傷程度較小,對后續秋刀魚的加工不影響。即將總時間作為衡量導向裝置的主要影響因素。根據正交實驗結果(表3),影響秋刀魚導向總時間的主次順序是:C(轉速)>B(轉速比)>A(間距)。根據秋刀魚導向總時間回歸方程作出等高線如圖9所示。
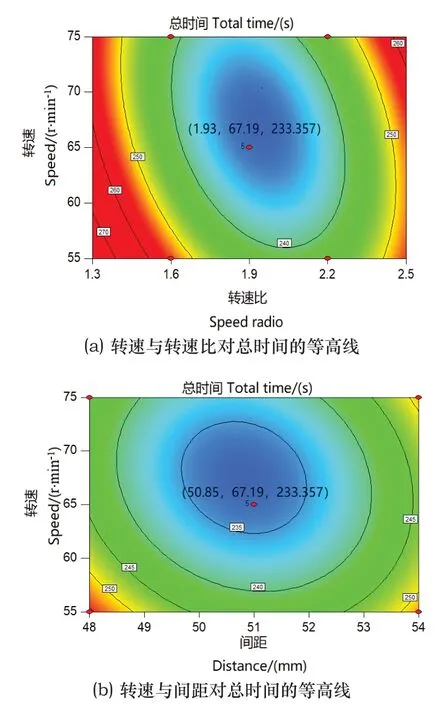
圖9 各因素對總時間的等高線圖
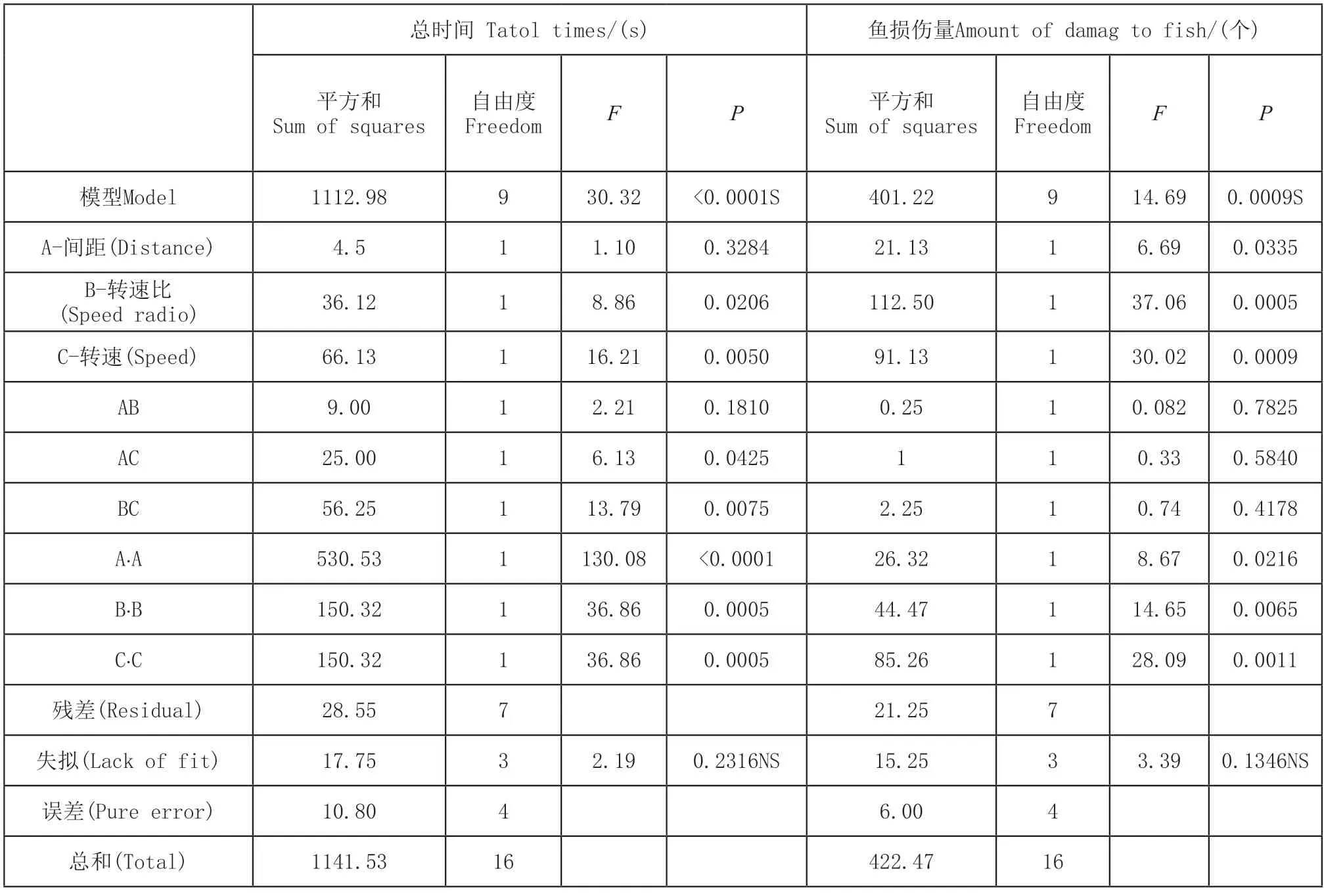
表3 正交試驗結果表
4.2 確定參數最優參數和樣機試驗
通過對圖9(a)、圖9(b)所示的等高線的對比分析且本實驗中最優解只有一個,確定的最佳參數為:間距為50.85mm,轉速比為1.93,轉速為67.19r?min-1,總排序時間為233.357s。即導向速度為每條2.33s。為了檢驗最佳參數的準確性,對其進行樣機性能試驗,依據最優參數調節工作參數。通過對100條秋刀魚進行性能測驗得出:總排序時間238s,即輸送速度每條為2.38s。此時魚體損傷個量為12條,損傷率為12%。試驗結果基本與仿真結果相符。
5 結語
本研究設計一種秋刀魚的導向裝置,同時也對其導向裝置進行了原理分析、參數優化及性能試驗。分離機構主要由電磁振動器和雙漏嘴型漏斗組成,可以使秋刀魚逐條地輸送到傳送帶上,在限位組件的作用下,秋刀魚垂直地輸送到導向機構處,基于差速原理的導向裝置,通過摩擦力的不同,對秋刀魚進行導向作用。為了得出導向機構的最優參數,在單因素試驗的基礎上,設計了三因素五水平的二次正交旋轉組合試驗.當間距為50.85mm,轉速比為1.93,轉速為67.19r?min-1,裝置能達到最好效果。同時基于最佳參數,通過100條秋刀魚進行性能試驗,試驗結果基本與仿真結果相符。
本研究對秋刀魚的分離導向裝置的結構參數進行了優化設計,但并未考慮到對秋刀魚的投入量、導向輪的半徑、秋刀魚導向后的狀態等因素的影響。所以需要繼續研究其理論、完善實驗,提高裝置的適應性。