非線性互聯系統狀態觀測器設計方法研究
2023-02-03 05:17:18孫延修
自動化儀表 2023年1期
孫延修,黎 虹
(沈陽工學院基礎課部,遼寧 撫順 113122)
0 引言
隨著現代工業控制系統復雜程度的不斷提升,非線性互聯系統可以更好地描述實際生產過程。因此,非線性互聯控制系統在電力系統、生產系統、水力供給系統、多智能體系統等各種系統中得到了廣泛的應用。為此,針對互聯系統的研究引起了人們的廣泛關注[1-3]。其中,狀態觀測器的設計有利于系統的魯棒控制及故障估計與診斷的實現,在控制理論中具有重要的作用。所以,針對控制系統狀態觀測器的設計是控制領域的研究熱點。目前,針對廣義系統及互聯系統觀測器的研究已經取得了一定的成果[4-8]。
針對非線性互聯系統狀態觀測器的設計方法正逐漸成為重要的研究課題。文獻[6]基于互聯系統的相似性,針對一類相似廣義互聯系統進行了研究,給出了互聯系統區間觀測器的設計方法。所設計的區間觀測器對控制系統及擾動性具有相對寬松的條件。文獻[7]通過設計干擾觀測器,有效降低了滑模抖振,并且帶干擾觀測器的滑模控制效果優于常規滑模控制。文獻[8]針對一類廣義系統進行研究,設計了系統的全維以及降維形式的狀態觀測器,并簡化了兩個觀測器增益矩陣的求解過程。文獻[9]針對一類互聯系統的故障診斷問題進行了研究,通過所設計的互聯系統診斷觀測器實現了對各子系統中故障的在線有效估計。文獻[10]針對含有不確定項的廣義系統提出了新的故障估計觀測器的設計方法,并對控制系統發生故障情況下的故障部分進行了仿真,驗證了故障估計誤差對外部擾動所具有的魯棒性。
近年來,針對非線性廣義互聯大系統觀測器的研究偏少。本文針對含擾動項與非線性項的一類廣義互聯系統進行研究,給出了非線性互聯系統觀測器的設計方法。該方法考慮到系統的外部擾動,設計了狀態觀測器;以線性矩陣不等式的形式給出了增益矩陣滿足的條件,簡化了非線性互聯系統觀測器增益矩陣的求解過程;通過兩個仿真算例,檢驗了觀測器設計方法的有效性。
1 問題描述
具有N個含擾動非線性子系統的廣義互聯系統為:

(1)
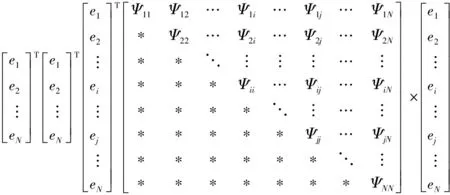
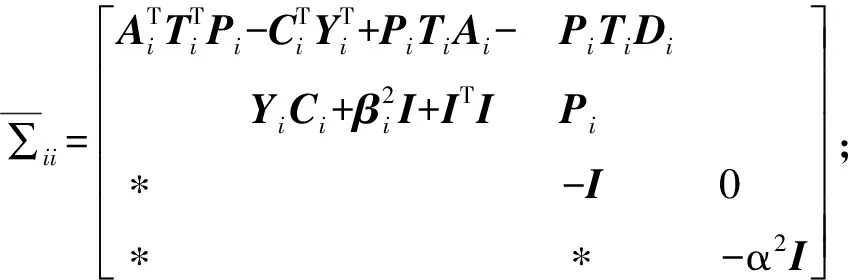
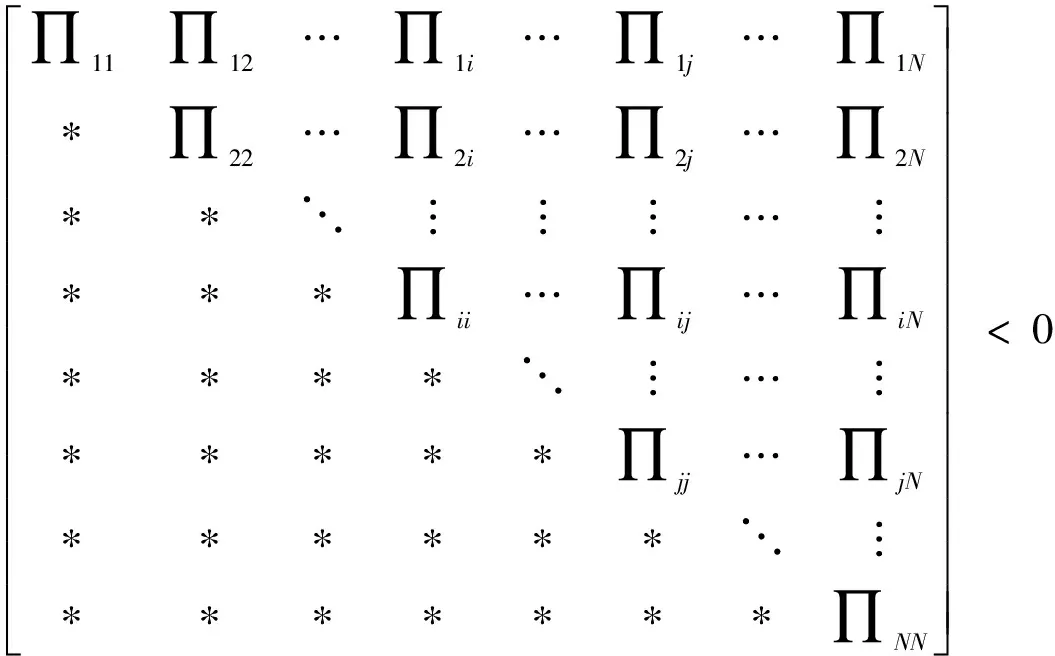
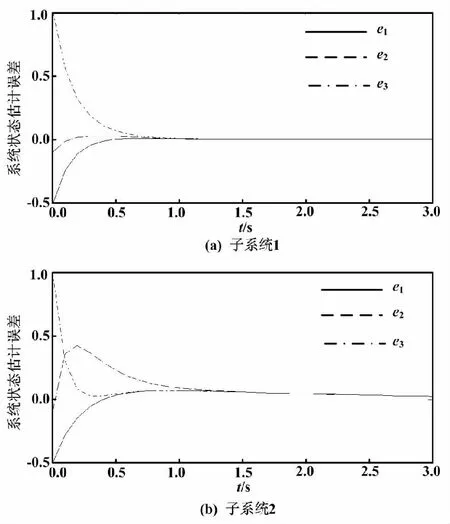
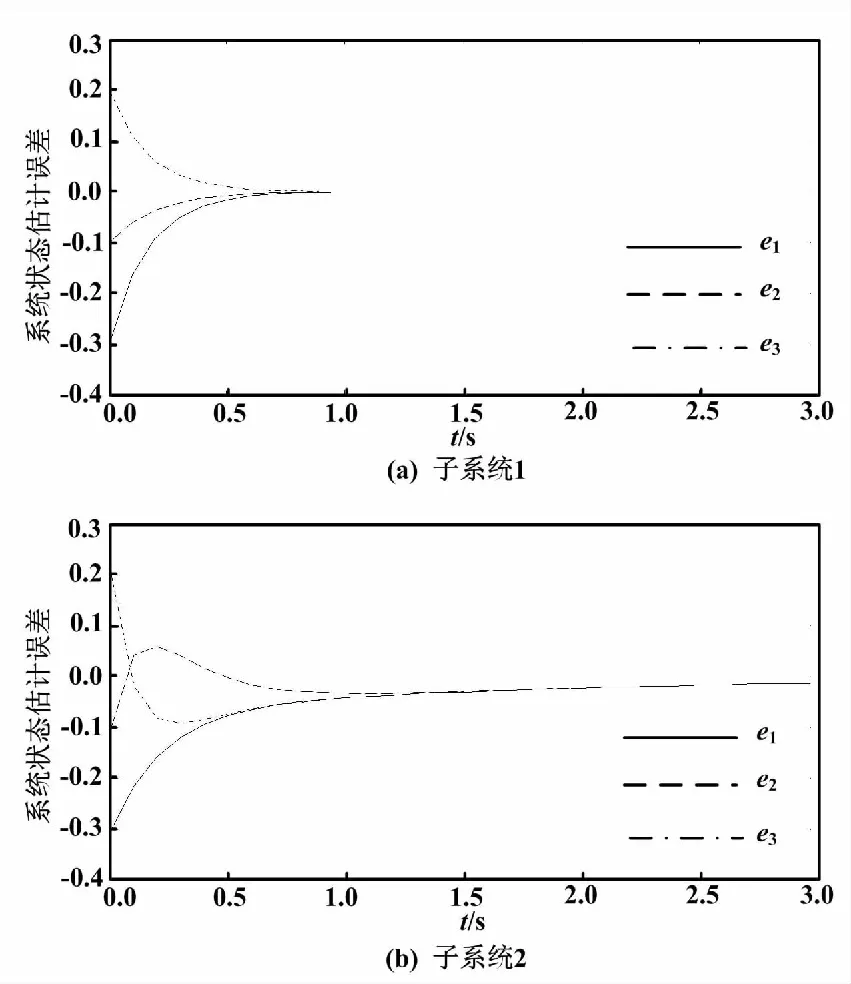
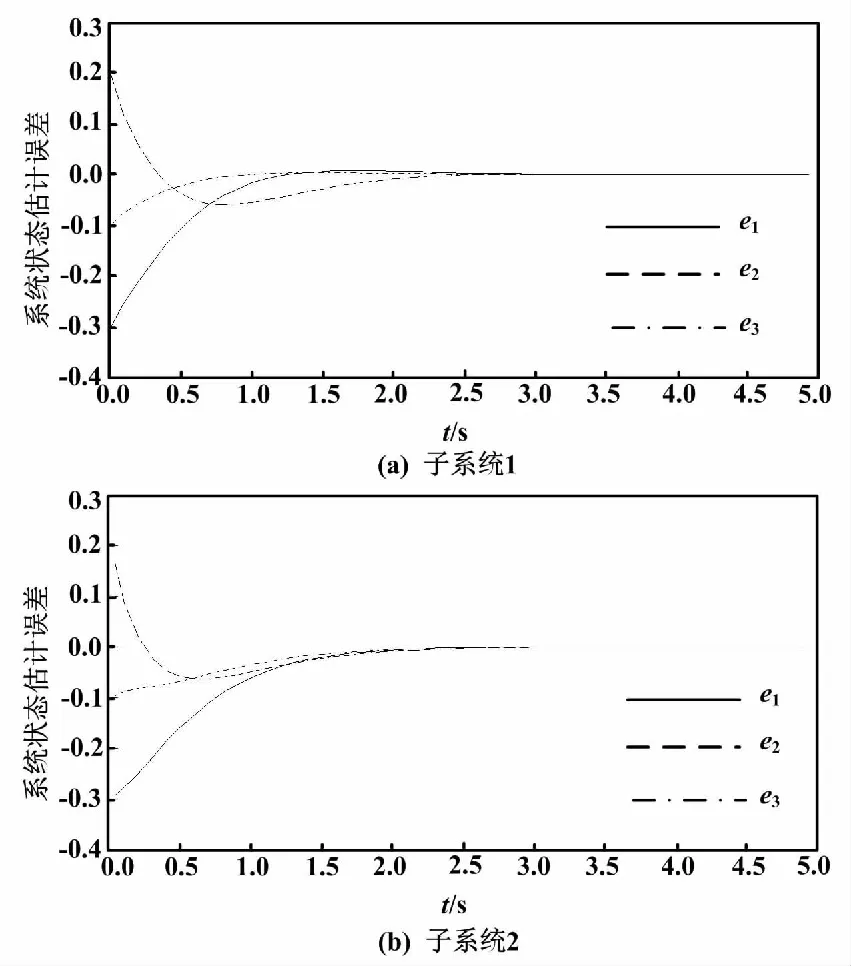
式中:xi(t)為狀態向量,xi(t)∈Rn;ui(t)為控制輸入,ui(t)∈Rm;yi(t)為被控輸出,yi(t)∈Rp;ωi(t)為系統干擾項,ωi(t)∈Rl;Ei、Ai、Bi、Ci、Di分別為具有適當維數的已知矩陣,Ci為列滿秩矩陣;rankEi 假設1 非線性項gi[xi(t),t]滿足Lipschiz條件: (2) ①M<0。 TiEi+NiCi=In+q (3) 式(1)可轉換為: (4) 針對式(2),可設計以下觀測器: (5) 式中:Li為第i個子系統的增益矩陣。 根據式(4)和式(5),可以得到第i個子系統的誤差動態方程為: (TiAi-LiCi)×ei(t)+Δgi+TiDiωi(t)+ (6) 定理1 若正定矩陣Pi和增益矩陣Li滿足以下不等式(7): (7) 則式(5)為互聯系統(1)的狀態觀測器。 (8) 根據Schur補引理1,有式(9),則可推出不等式(7),證畢。 (9) 定理2 若正定矩陣Pi和增益矩陣Li滿足不等式(10): (10) 則式(5)為互聯系統(1)的狀態觀測器。 (11) i,j=1,2,...,N。 根據Schur補引理1,有式(12),則可推導出不等式(10),證畢。 (12) 注1 廣義互聯系統中的互聯項是觀測器設計的難點。考慮到系統的干擾項,定理2給出了增益矩陣存在的充分條件,以便通過MATLAB軟件對增益矩陣進行求解。 定理3 若正定矩陣Pi和增益矩陣Li滿足不等式(13): (13) i,j=1,2,…,N。 則式(5)為互聯系統(1)在Ei=I情況下的狀態觀測器。 說明:定理3的證明過程同定理2,證明過程略。 注2 正常互聯系統是廣義互聯系統的特殊形式,在系統狀態觀測器的設計過程中令奇異矩陣Ei=I。根據定理3可以求出互聯系統觀測器的增益矩陣,相對于廣義形式的控制系統觀測器的設計更為簡便。 考慮如下含2個廣義子系統的非線性互聯系統: (14) 說明:式(14)算例針對本文給出的狀態觀測器設計方法進行驗證。該設計方法對控制系統中的擾動項的具體形式沒有具體要求,所以上述數值算例并未給出擾動項的參數。 利用MATLAB可以計算出在α=0.7時,觀測器的增益矩陣。 ①不含擾動情況下,求解出的觀測器增益矩陣為: ②含擾動情況下,求解出的觀測器增益矩陣為: 不含擾動項時觀測器誤差仿真曲線如圖1所示。圖1中,互聯系統(14)的初始估計誤差為(-0.5,-0.1,1)。 圖1 不含擾動項時觀測器誤差仿真曲線 含擾動項時觀測器誤差仿真曲線如圖2所示。圖2中,互聯系統(14)的初始估計誤差為(-0.3,-0.1,0.2)。 圖2 含擾動項時觀測器誤差仿真曲線 由圖1、圖2可知,系統狀態估計誤差均趨于零,可以實現對非線性廣義互聯系統(14)中狀態向量的魯棒估計。 參考文獻[12],考慮以下含2個子系統的非線性互聯系統: (15) 正常互聯系統觀測器誤差仿真曲線如圖3所示。圖3(a)和圖3(b)分別為互聯系統(15)在初始估計誤差為(-0.3,0.2,-0.1)時,各子系統的觀測器狀態估計誤差曲線。由圖3可知,系統狀態估計誤差均趨于零,觀測器狀態向量可以實現對互聯系統(15)中狀態的魯棒估計。 圖3 正常互聯系統觀測器誤差仿真曲線 本文針對同時含外部擾動項與非線性項的一類非線性互聯系統進行研究,給出了系統狀態觀測器的設計方法。增益矩陣以線性矩陣不等式的形式給出,有利于各子系統增益矩陣的求解;同時,李雅普諾夫函數中設計的性能指標可以減少擾動對系統狀態估計的影響。通過兩個仿真算例,驗證了所提出的狀態觀測器設計方法的有效性。本文觀測器的設計方法可以為后續具有不確定性、時滯性的非線性互聯系統觀測器的設計提供理論支撐。



2 廣義互聯系統觀測器的設計

3 主要結果
3.1 系統不含擾動項時狀態觀測器的存在條件





3.2 系統含擾動項時狀態觀測器的存在充分條件





3.3 正常互聯系統狀態觀測器的存在充分條件

4 仿真算例
4.1 廣義互聯系統仿真算例
4.2 正常非線性互聯系統仿真算例

5 結論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
