某壓水堆核電站控制棒驅動機構電流負載特性淺析
2023-02-03 02:56:14穆昌洪牛新祥齊宇博
自動化儀表 2023年1期
關鍵詞:系統
穆昌洪,方 郁,牛新祥,齊宇博
(中廣核研究院有限公司,廣東 深圳 518000)
0 引言
某百萬千瓦級壓水堆核電站棒控棒位系統(rod position indication and rod control,RGL)的控制機柜由控制棒驅動機構電源(rod drive mechanism power,RAM)系統260 V AC和220 V AC交流電源系統(220 V AC normal power source and distribution system,LMA)提供冗余控制電。將RAM三相260 V AC動力電經三相半波整流為特定時序電流來驅動控制棒驅動機構(control rod drive mechanism,CRDM),可實現控制棒的提升、下插、保持及故障雙保持。
如RGL失去全部冗余控制電或RAM三相動力電,將直接導致控制棒落入堆芯。因此,電源系統的可靠、穩定將直接影響機組的可用率和經濟性。本文假定新RGL技術方案維持現有的供電方式,分析在核電站極限負載工況下RAM系統的最大負載特性及電源需求,并提出合理、可行的供電改進方案,以避免潛在的不利影響。
1 RGL系統簡介及供電方案
1.1 RGL系統簡介
百萬千瓦級核電站RGL系統儀控部分由1個邏輯柜、16個電源柜、1個處理柜及3個測量柜構成。
其中,處理柜和測量柜完成棒位測量及棒位監視功能;邏輯柜執行反應堆功率控制、功率監視功能,向電源柜發出提棒、插棒控制指令;電源柜循環控制器執行邏輯柜控制指令,并產生特定時序的定值信號,使動力機架(LC/MG/SG)產生控制棒提升、下插及保持所需的CRDM線圈時序電流[1],驅動控制棒在反應堆中的提升、下插及保持。
1.2 系統供電方案
RGL由棒控子系統和棒位子系統構成。其中:棒控子系統包含1個邏輯柜和16個電源柜,實現控制棒的提升/下插/保持邏輯控制和驅動;棒位子系統包含處理柜和測量柜,實現棒位測量及棒位監視功能。RGL供電如圖1所示。

圖1 RGL供電示意圖
(1)棒位子系統。
①控制電電源:220 V AC不間斷電源系統(uninterruptible power supply system,LNE)。
②接口電源:48 V DC電源系統(48 V DC power supply system train A,LCA)。
(2)棒控子系統。
①控制電電源:冗余設計(LMA和RAM)。其中,RAM控制電取自RAM發電機組的A相和B相。
②接口電源:LCA。
③動力電源:由RAM 三相260 V AC電源經停堆斷路器后提供。
百萬千瓦級核電站RAM供電系統由2臺100%容量的RAM發電機組構成。每臺機組由異步電動機、惰轉飛輪、發電機等構成。其平均容量約為79 kW、短時峰值功率為124 kW、視在功率為400 kVA、功率因數ψ=0.25、電動機機械功率為135 kW[2]。該設計可防止運行期間RAM發電機組因檢修、單一故障或瞬時失電而導致的控制棒意外落棒停堆,可提高電源系統的可靠性。
當前,RGL系統控制電負荷約為2.7 kW,系統同時上電的沖擊電流不超過360 A。通過前期調研并考慮一定的裕度,新的數字化控制系統的控制電功率需求約為11 kW,同時上電沖擊電流將可能達到900 A。因此,有必要對現有供電系統的容量及特性進行全面的論證分析。
2 RAM負載容量特性分析
2.1 系統供電模型分析和簡化
目前,控制棒驅動技術主要采用“一拖一”控制技術(即1個整流控制回路控制1個CRDM線圈),基于可控硅三相半波整流或絕緣柵雙極型晶體管(insulated gate bipolar transistor,IGBT)進行整流。整流控制電路根據循環控制器的定值信號,將RAM三相電源整流為直流后驅動CRDM線圈。
假定新系統供電方案保持不變,RGL新系統簡化后的系統動力回路模型如圖2所示。
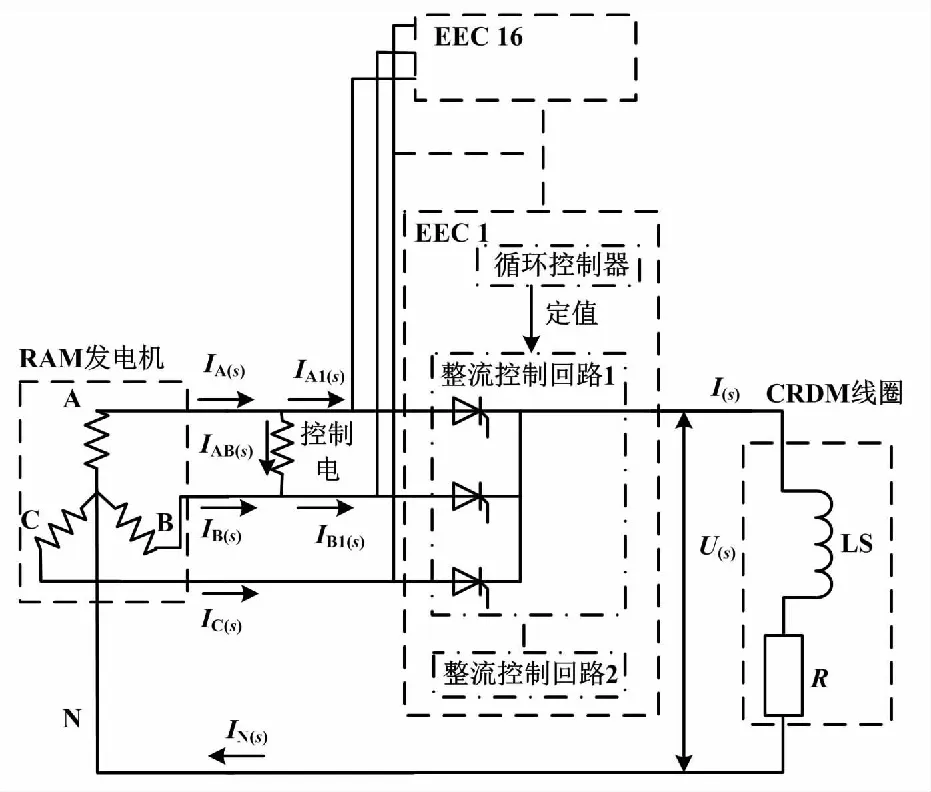
圖2 系統動力回路模型
假設CRDM線圈的電感和電阻在動作過程中不變[3],則其端口電壓和電流的復頻域方程為:
(1)
式中:I(s)為線圈電流,s為拉氏變換的復頻域算子;U(s)為整流電路輸出電壓;i(0_)為線圈初始時刻電流;R為線圈等效電阻;L為線圈等效電感。
對整流原理進行分析可知,U(s)與RAM三相動力電的波形和整流電路的導通角或觸發脈沖寬度有關,其電壓包含直流分量(等于I×R)、電源頻率3倍(即150 Hz)的基波頻率和高次諧波頻率[4],最大瞬時電壓不超過其相電壓。因此,CRDM線圈電流不存在沖擊變化,且同一時刻單個線圈的整流電路對A、B、C三相而言僅有一相有導通電流。
圖2中,1個電源柜同時控制1個子棒組的4個CRDM運行。每個CRDM的提升、傳遞、保持線圈由不同的整流電站分別控制。因此,核電站61個CRDM由分布在16個電源柜內的183個整流電路驅動。RAM系統N相電流復頻域方程為:
(2)
式中:IN為N相總電流;In為各個線圈電流;Un為各個線圈電壓;Ln為各個線圈等效電感;Rn為各個線圈等效電阻;in(0_)為各個線圈初始電流。
根據RAM系統電源接法,其N相電流與其他各相電流間的關系如式(3)所示。
(3)
式中:IN為RAM發電機N相電流;IA為RAM發電機A相電流;IB為RAM發電機B相電流;IC為RAM發電機C相電流;IA1為整流電路對RAM系統A相總電流;IB1為整流電路對RAM系統B相總電流;IC1為整流電路對RAM系統C相總電流;IAB為RAM控制電電流。
對整流原理和上述電流方程進行分析可知,RGL系統對RAM動力電流IA1、IB1、IC1的有效值相等,并含有大的直流分量和高次諧波,且同一時刻A、B、C三相動力電中最多有兩相存在電流。RAM系統的N相電流IN大小等于所有CRDM線圈電流之和。在控制棒動棒的動態過程中,通過改變各個整流電路導通角或觸發脈沖寬度,使CRDM線圈電流由當前狀態至時序定值目標變化,線圈電壓為相應相導通電壓。
此外,由于新系統RAM控制電電流IAB增大,并由A、B相間引出,將導致RAM發電機三相間功率不斷增大,影響RAM發電機組的安全、穩定運行。
2.2 CRDM動棒瞬時功耗計算
結合前文分析可知,在線圈電流上升階段,CRDM動棒和插棒的理論波形[5]可包絡實際波形,線圈電壓U上升,并需要RAM動力系統提供有功功率;在線圈電流穩定階段,線圈電壓和電流相對穩定,動力系統補償線圈電阻消耗的功率;在線圈電流下降階段,電壓U下降,無需動力系統提供有功功率。
由于CRDM動棒過程中,線圈電壓在相電壓范圍內變化,電流建立時間一般在100 ms內[6]。根據系統設計要求,線圈穩態電流與理論電流誤差在4%以內[7],因此可忽略線圈動棒波形各個階段的瞬時功率誤差。單個CRDM有功功率可簡化為:
PCRDM=ILC×ULC+IMG×UMG+ISG×USG
(4)
式中:ILC為提升線圈理論定值電流;IMG為傳遞線圈理論定值電流;ISG為保持線圈理論定值電流;ULC為提升線圈穩態有效電壓;UMG為傳遞線圈穩態有效電壓;USG為保持線圈穩態有效電壓。
假設在25 ℃時:傳遞、保持線圈電阻為9.45 Ω,連接電阻約為0.4 Ω;提升線圈電阻為1.45 Ω,連接電阻約為0.2 Ω。在機組功率運行期間,CRDM線圈設計工作溫度約為200 ℃[8]。根據線圈電阻和溫度間的關系式,有:
(5)
式中:R2為換算電阻;R1為測量電阻;T為電阻溫度常數;t2為換算溫度;t1為測量溫度。
CRDM線圈一般采用銅導體,其電阻溫度常數取234.5 ℃。則根據式(5),可得CRDM在反應堆功率運行(約200 ℃)時的電阻計算式:
(6)
式中:R200為CRDM線圈在200 ℃時的回路等效電阻;R25為CRDM線圈在25 ℃時的回路等效電阻;rl為CRDM與整流電路間的連接電阻。
根據式(6)計算可知,功率運行時的CRDM傳遞、保持線圈回路等效電阻約為16.2 Ω;提升線圈等效電阻約為2.63 Ω。
穩態時,CRDM線圈有效電壓可估算為等效電阻×電流。因此,在反應堆功率運行時,根據式(4)編程仿真,傳遞、保持線圈全電流等效電壓約為129.6 V,提升線圈全電流等效電壓約為105 V。綜合考慮實際工況、損耗等因素,為簡化計算,ULC、UMG、USG取120 V,ILC、IMG、ISG根據理論波形取值計算CRDM線圈的動棒功率。該計算所得功率可包絡實際的功率波形。CRDM動棒瞬時功率波形如圖3所示。
由圖3可知,在CRDM的1個動棒循環過程中,其峰值功率約為7 kW,且有功功率存在較大變化。
2.3 RAM最大負載容量分析及仿真
核電站采用G模式運行,通過功率棒和溫度棒的協調控制,實現反應堆功率的快速調整。在機組以±5%FP/min持續負荷變化[9]或通過汽機旁路系統旁路甩負荷等正常I類運行瞬態時,需要棒控系統快速提升或下插控制棒,使反應堆的反應性與需求功率相匹配。為保證功率調整過程中對軸向功率分布的擾動最小,N2、N1、G2、G1這4個功率棒組采用疊步方式運行。
RAM系統設計滿足1臺RAM發電機組停運檢修或故障跳閘時,另外1臺RAM發電機必須能保證同時提升或下插最多的控制棒,且提供保持其他控制棒所需的最大瞬時功率的要求。假定CRDM線圈工作溫度維持不變,在快速瞬態的極限負載工況下,RAM系統將驅動3個棒組。2個功率控制棒組在疊步區內運行,且溫度棒組(R棒組)也參與調節,同時動棒(其他控制棒保持),則此時RAM系統負荷最大,可承受極限的功率負載。
在棒控系統設計時,考慮對RAM系統的沖擊及帶載能力,每個棒組包含8根控制棒(4根控制棒為子棒組1,另外4根控制棒為子棒組2),同一棒組的2個子棒組CRDM的電流波形相差半個棒速周期(半步)。在快速瞬態的極限負載工況下,最多3個棒組CRDM(16功率棒疊步+8 R棒)同時動作。為簡化分析,假設2個功率棒組和R棒組同時動作且方向相同,則子棒組1由12個CRDM 驅動3棒組×4根控制棒、子棒組2包含12個CRDM。子棒組間的控制棒相差半個動棒周期,其他37根控制棒保持。則CRDM最大負載功率可由式(7)獲得:
Pmax=12Pg1+12Pg2+37Pstay
(7)
式中:Pmax為CRDM對RAM的最大負載功率;Pg1為子棒組1單個CRDM動棒功率;Pg2為子棒組2單個CRDM動棒功率;Pstay為保持控制棒所需的功率。
同理,CRDM對RAM的最大負載電流(N相)可由式(8)獲得:
Imax=12Ig1+12Ig2+37Istay
(8)
式中:Imax為CRDM對RAM的最大負載電流;Ig1為子棒組1單個CRDM的負載電流;Ig2為子棒組2單個CRDM的負載電流;Istay為保持控制棒所需的負載電流,即提升、傳遞線圈電流為零,保持線圈電流約為4.8A[10]。
根據CRDM工作原理,控制棒棒速在6~72步/分變化。由單個CRDM動棒電流波形和功率波形、式(7)和式(8)仿真,在不同控制棒棒速下提棒,CRDM對RAM的最大負載電流和最大負載功率進行仿真。RAM負載電流隨棒速的變化如圖4所示。RAM負載功率隨棒速的變化如圖5所示所示。
根據圖4、圖5仿真結果分析,RAM動力電的峰值電流和峰值功率隨棒速上升而上升。提棒棒速在6~69步/分時,RAM峰值電流和峰值功率分別為907.2 A和108.86 kW。提棒棒速在70~72步/分時,RAM峰值電流和峰值功率分別上升至1 041.6 A和124.99 kW。
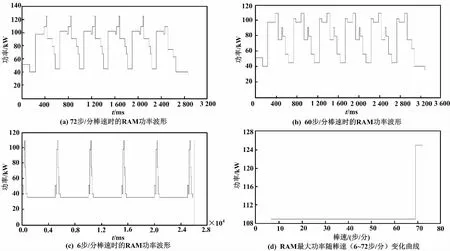
圖4 RAM負載電流隨棒速的變化
圖5 RAM負載功率隨棒速的變化
同理,在不同棒速下插棒也將得到類似結論。在極限功率負載工況下,如果1臺RAM機組例行檢修或故障跳閘,同時LMA冗余控制電故障失去,則另1臺RAM機組將承擔所有負荷[2],其控制電和動力電總功率最大將達到135 kW,并大于RAM發電機額定功率(100 kW)。因此,RAM可能不滿足新系統的控制電及動力電供電容量要求,存在潛在的風險。
3 新系統供電方案設計
為避免改進后因控制電容量增大而帶來的潛在風險,并滿足控制電或電源模塊單一故障準則的要求,新系統控制電由RAM/LMA變更為LNE/LMA,并為處理柜增加1路LMA冗余控制電。
新系統供電方案如圖6所示。圖6中,虛線圈出部分為新方案中變化的電源負荷。
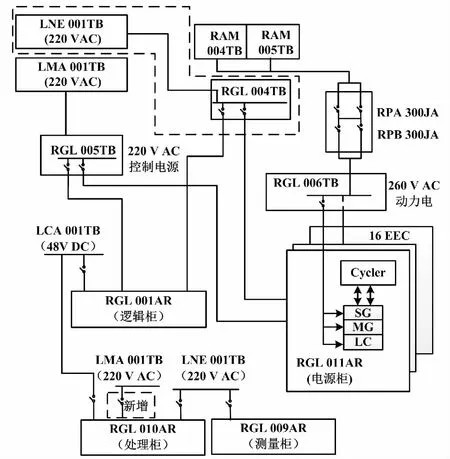
圖6 新系統供電方案
由于柴油機倒電定期試驗將導致LMA短時失去,因此,LMA電源系統恢復時需能承受所有機柜同時上電引起的沖擊。鑒于原系統設備老化、故障診斷困難、設備停產等因素,需要對RGL系統的邏輯柜、處理柜、電源柜進行整體數字化升級改進。新系統設備控制電源容量由2.7 kW上升至11 kW,導致RGL004/005TB空開容量不滿足新系統的要求,且上游LNE/LMA系統已接近額度荷。因此,新系統供電方案涉及RGL004/005TB空開換型、LNE/LMA容量擴容等改進,并統籌考慮后續DCS等改進的供電需求。
LNE系統為不間斷電源,由應急母線和蓄電池逆變供電,可靠性較RAM更高。將原有RGL的RAM兩相控制電轉移至LNE,可有效降低RAM發電機組的三相不平衡現象,有利于RAM發電機組的穩定運行,同時可確保改進后RGL控制電源系統的可靠性。
4 結論
某核電站RGL系統由RAM系統提供動力電和控制電進行供電。本文假設改進后的RGL系統供電方式不變,通過簡化RAM供電模型,分析極限負載工況下RAM系統可能的最大負載并進行仿真。仿真結果表明,隨著新系統控制電容量增大,原系統供電方案不利于RAM系統的穩定運行,存在潛在的風險。
改進后的RGL系統控制電滿足單一故障準則,由LNE/LMA進行冗余供電。綜合RGL改進和后續全廠DCS數字化改進等電源需求,LNE/LMA系統需進行擴容改進,并與RGL改進同步規劃實施,保證改進后RGL系統的供電容量和品質滿足系統正常、穩定運行需求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
