我國山藥機械化收獲技術研究進展*
2023-02-04 12:18:58歐陽蕾李維華焦偉吳東輝侯加林
中國農機化學報 2023年1期
歐陽蕾,李維華,焦偉,吳東輝,侯加林
(1. 山東農業大學機械與電子工程學院,山東泰安,271018; 2. 山東省農業機械科學研究院,濟南市,250100;3. 青島理工大學機械與汽車工程學院,山東青島,266520)
0 引言
山藥又名山薯、山芋、長芋等,含有豐富的營養物質,有利于人體的健康[1-2]。我國山藥的種植有4 000多年的歷史,發展山藥產業基礎條件好,勞動力資源豐富,大部分土地適合種植,山藥種植范圍很廣,主要產于河南、河北、山東、江蘇等省份[3-5]。我國收獲的山藥不僅滿足了國內市場需求,而且遠銷日本、美國、加拿大、馬來西亞等國家,國際市場廣闊。
山藥屬于根莖類作物,山藥收獲的挖掘可達 0.7~1.6 m,一般收獲動土量達1 800~2 100 m3/hm2,山藥直徑在2~5.5 cm,人工收獲效率大概為0.013 hm2/h,而且山藥脆,容易斷裂,所以人工傳統的人工收獲方法勞動強度高、收獲效率低,而且容易損傷山藥,影響農戶的收入,從而抑制種植山藥的積極性[6-7]。因此,山藥收獲機械化是未來山藥產業發展的趨勢,受到區域地質、氣候、品種等因素的影響,再加上我國地域遼闊,南北地理特點差異較大,所以不同地區生長的山藥也具有不同的特征。由于山藥自身的多樣性和地域的差異性,山藥的機械化收獲發展始終存在瓶頸。因此,我國種植山藥的農戶迫切需要山藥的機械化收獲[8-9]。
本文首先論述了我國一些品種的山藥生長特性,分析我國山藥的幾種收獲方式及其經濟效益對比,然后闡述我國山藥機械化收獲核心裝備的研究進展,指出我國山藥收獲機械化發展面臨的問題,并提出發展建議。
1 山藥的生長特性
我國種植山藥的歷史悠久,全國各地分別種植有不同種類的山藥,從外形上來劃分,可以分為長山藥、扁山藥和圓山藥。而長山藥是比較常見的,比如大和長芋、鐵棍山藥、麻山藥、水山藥、細毛山藥等圓柱形品種。扁山藥和圓山藥生長位置淺,可以直接用馬鈴薯、花生等淺層根莖類作物收獲機進行收獲。而長山藥長得細且較長,生長在較深的土壤中,收獲比較困難[10]。
因為山藥的特性,所以研究山藥的形狀尺寸、種植農藝、物理特性等山藥的特點,能對研究山藥收獲的機械化提供理論依據。表1是我國幾種長山藥品種的形態尺寸、種植農藝的數據[8-9]。

表1 我國主要山藥品種Tab. 1 Main yam varieties in China
我國山藥品種雖多,山藥根莖力學特性的研究更是研發山藥收獲機的理論來源,但是對于各種山藥根莖力學特性的研究不多。兩種不同山藥的力學特性如表2所示。
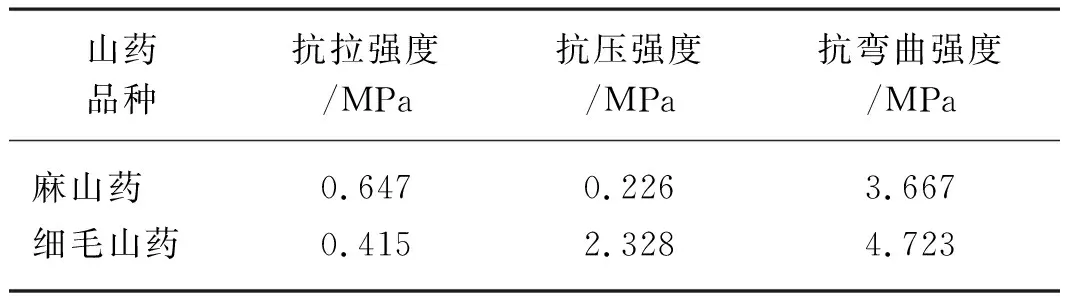
表2 兩種不同山藥的力學特性Tab. 2 Mechanical properties of two different yams
根據研究者對山藥力學的分析,可以看到這兩種山藥抗彎曲強度高,抗拉壓能力弱,易被拉斷或者壓斷,在設計山藥收獲機械的時候,應該重點考慮山藥收獲的時候軸向拉壓力的作用,以減少山藥機械化收獲給山藥造成的損傷。
2 我國山藥收獲方式
由于我國為山藥主產區,所以山藥機械化收獲技術以國內研究為主[11]。目前我國沒有一種很好的山藥聯合收獲裝備,山藥多為人工收獲,勞動強度大,收獲效率低,只有部分農戶對山藥進行機械化收獲[12]。
2.1 人工收獲
一般來說,山藥在秋天采收,等到它地上的莖葉枯萎以后,然后才開始采挖;也可以將山藥留在地里,等到第二年春天再來進行采挖;有一部分大棚種植的山藥,可以在夏天七月份進行采挖[13]。
在人工收獲的時候,農戶從溝的一段開始先挖出一定深度的深溝,農戶一般使用特制鐵鍬把地下兩邊側根沿著山藥向下鏟斷,清除根側泥土,直到山藥露出泥土,然后嘗試提起山藥,當山藥松動的時候,提起山藥上端,鏟斷它的側根,最后整個山藥提出土壤,完成山藥的收獲[7]。
2.2 機械收獲
我國的機械化程度要普遍低于歐美日等發達國家水平,山藥收獲機械化程度也相對較低。山藥機械化收獲就是利用機器挖掘出山藥,最后收獲山藥,目前在我國機械收獲山藥主要有兩種方式,一種是鏈式開溝收獲,另一種是螺旋式松土收獲,這兩種收獲方式都是先進行山藥兩邊開溝,破壞山藥所在的中間土閥,然后人工撿拾山藥。一般來說,機械收獲工作效率高,成本低。鏈式開溝收獲主要是利用設置的鏈條帶動刀具在山藥土埂旁邊進行開溝,通過改變刀具的結構尺寸來確定溝寬,一般采用液壓油缸的形式控制開溝的深度;而螺旋式松土的收獲主要采用立式螺旋開溝刀具開溝,開溝部件為直接安裝在軸管上的螺旋刀片,在開溝作業的時候,能將泥土輸送至上方。
3 我國山藥機械收獲裝備與技術研究進展
因為山藥生長的特殊性,所以我國山藥收獲機械化存在一些問題,我國研究者對山藥機械收獲技術進行了一定的研究,取得一定的成果。就目前來說,山藥機械化收獲裝備主要工作部件包括行走系統、傳動系統、開溝系統、土壤翻振機構和定位系統等裝置,所以本文重點論述這幾種主要工作部件。
3.1 行走系統
行走系統是山藥收獲機械化的基礎,目前山藥收獲機械行走系統主要是輪式行走機和履帶式行走機[14]。輪式行走機主要動力源是農業拖拉機,拖拉機通用性好、速度快,但是對于爬坡、越障、地面適應等能力比履帶式行走機差。履帶式行走機地面接觸面積大,接地比壓小,能夠緩和在山藥收獲過程中的地面凹凸不平,抗打滑能力強,具有良好的穩定性,適合在各種土壤環境在行駛。履帶式行走機結構形式又可以分為兩種:一種用手扶拖拉機變速箱作為傳動部件,利用皮帶變速,適用于小規模種植;另一種采用液壓驅動履帶,它能通過液壓系統的作用實現無級調速,一般用于大規模種植山藥,操作性大大提高。
輪式行走機主要是通過懸掛機構連接農用拖拉機,拖拉機后輸出軸與減速箱通過萬向節連接,工作時減速箱輸出軸將動力傳遞給開溝、振動松土等工作機構[15]。而對于履帶式行走機,李紅偉[16]發明了一種手推式山藥收獲機,主要包括動力系統和收獲系統,動力系統采用手扶拖拉機作為動力源,利用皮帶傳動驅動履帶,其收獲系統的開溝裝置進行開溝作業,單人可以一邊推車一邊完成收獲作業,體積小,重量輕,相較于人工開溝收獲可以節省人力。陳晨特[17]發明了一種履帶式長山藥采收機器人,這是一種液壓驅動履帶式的山藥收獲機械,機架下部外側分別設有履帶行走系統,履帶前端有引導輪,履帶后設有驅動輪,驅動輪同軸設置有驅動馬達,履帶中間有多個支重輪。這種液壓驅動履帶基本可以在不同種類的土壤中工作,如黏土、沙土等地,適用性強。
3.2 傳動系統
山藥生長在地下,每個種類的山藥生長位置都有所不同,所以山藥收獲機工作機構的深度調節、角度調節結構尤為重要,可以增加山藥收獲機的適用性,更好地完成不同種類山藥的機械化收獲。2014年于萬勝[15]模仿考古挖掘過程,在山藥左右兩側進行開溝,中間振動松土機構將山藥和土壤分離,最后由輸送機構將山藥和土壤輸送地面,人工撿拾。該機器采用一對液壓油缸來調節挖掘深度,油缸一端與機架連接,油缸另一端與開溝裝置鉸接,當油缸回縮時,開溝裝置提到地面;當油缸伸出時,開溝裝置降到山藥收獲所需要的深度;輸送機構通過液壓油缸與機架相接,可以調節輸送機構角度。這種機器通過液壓機構的調節來實現山藥收獲機重要工作部件深度、角度的改變,有利于收獲不同深度的山藥。
有些山藥收獲機功能完善,但是卻顯得笨重,不能在山藥田地邊完美的作業,現有的機器開溝機構和翻振機構通過滑動裝置連接在機架上,滑動裝置的動力由液壓缸控制,然而滑動裝置在機架上穩定性差,它們之間的間隙大,會出現晃動現象,而且油缸作用力可能會作用在滑動裝置下,產生的力矩會使滑動裝置卡在機架上。潘昭[18]發明一種滑動裝置,滑動機架通過導輪組和T形導軌在機架上穩定地移動,導輪組的3個導輪能在T形導軌的3個軌面上穩定的夾緊,設置的3個導輪的輪臂由彈簧頂住,從而保證整個滑動支架即使在田地中顛簸也能緊緊地夾在T形導軌之間,提升了整個裝置的穩定性,降低山藥收獲的損傷率,提高工作效率,增加機器的工作壽命。
3.3 開溝系統
3.3.1 開溝裝置
因為深埋類作物山藥的特殊性,我國山藥收獲機的設計多重于開溝機的研究。國內對于山藥收獲機的研究起步較晚,之前我國收獲山藥都是借鑒國外根莖類作物的收獲技術,在20世紀50—70年代分別出現了犁鏵式開溝機、圓盤式開溝機[19]等機械裝備。20世紀90年代,螺旋式、鏈式開溝機開始出現,同時國內拖拉機發展迅速,山藥收獲機械化開始出現[20-21]。但是國內農戶收獲山藥采用螺旋式開溝的不多,螺旋式開溝消耗的功率大,現有山藥收獲開溝方式多采用鏈式開溝[22],眾多學者對于山藥鏈式開溝技術做出了一定的研究,所以本文主要論述鏈式開溝的山藥收獲機。
3.3.2 螺旋式開溝
2011年薦世春等[23]發明了一種圓錐螺旋鉆管式山藥收獲機,拖拉機將動力通過萬向節等裝置傳遞給圓錐螺旋管,圓錐螺旋管旋轉入土將山藥挖出。螺旋鉆管的圓錐外表上有螺旋葉片,圓錐管上有均勻分布的長槽,下端為鋸齒形。
另外,市面上螺旋式山藥收獲機大多為大型機器,體積的龐大往往伴隨著巨大的重量,適合大規模山藥的收獲,但是對于小面積的山藥種植戶來說,小、靈活、操作簡單等特點的機器才是最適合的。2016年何玉靜等[24]發明了一種便攜式山藥收獲機,這種機器適用于山藥壟上工作,外套筒上的螺旋絞龍排土器可以入土排出山藥周圍的土壤,最后人工拾取,這種小型山藥收獲機在收獲的時候不會破壞山藥的生長土壤環境,符合山藥的農藝特點,對于小面積山藥種植戶來說,它經濟實用,工作效率高于人工。
3.3.3 鏈式開溝
現有山藥收獲機鏈式開溝主要有兩種:單行山藥收獲與雙行山藥收獲。單行山藥收獲主要是采用雙排開溝鏈的形式開溝,雙面開溝,最后收獲山藥,如山東某公司生產的4USY-1山藥收獲機[25],這種山藥收獲機可以在開溝之后通過輸送帶將中間土閥里面的山藥送到地面,人工最后只需要撿拾山藥。而雙行山藥收獲利用多根開溝鏈工作,開出三條深溝,兩行山藥。蠡縣某廠研制的4F-2型山藥收獲機采用履帶式行走、液壓轉向、三根鏈開溝等機構,一次可以開溝3條,挖出兩行山藥,能實現山藥收獲的開溝、松土等功能,最后人工可以輕松拔出山藥,破損率在5%以下,滿足農藝要求。宋濤[26]發明了一種雙行山藥收獲機,設有3~4排開溝鏈,2組土壤輸送裝置,而且開溝鏈與土壤輸送裝置的橫向位置可以調節,在換行收獲的時候,方便調節開溝的位置。
山藥收獲機在開溝作業的時候,因其土壤切削的復雜性,機器的功率消耗很大一部分都在阻力。切削阻力不僅與土壤含水量、孔隙比、粘結性和刀具的摩擦系數有關,而且受到切削深度、切削角度有關[27]。肖艷軍等研發了一種鏈式開溝山藥收獲機,根據山藥農藝特點,開溝深度為1.5 m,作業效率為300 m/h,取砂質土壤作為參考,鏈刀相對切削速度為3 m/s,參照國內外的鏈式開溝機相關參數,隔四節鏈節裝一把U型鏈刀,切土厚度為2.8 mm,通過土壤切削阻力相關公式與原理,確定了鏈刀總切削阻力為1 158.3 N。同時提出了一種山藥收獲機確定切削阻力和功率消耗的辦法,為山藥收獲機械化裝備的開溝減阻和優化設計提供了重要的理論依據。
3.4 土壤翻振裝置
要完成山藥機械化收獲,僅實現開溝是遠遠不夠的,還需要挖掘工作,而山藥與土壤的分離是山藥挖掘的關鍵,所以挖掘是整個山藥機械化收獲的重要功能。若只采用靜止的挖掘刀,會給機器造成巨大的阻力,消耗功率更大,對機械結構強度要求更高,同時會有部分土壤粘結在上面,而采用土壤翻振的方式可以降低阻力、疏松土壤、最后露出山藥,方便人工撿拾收獲,甚至可以直接降低山藥的損傷率[28-30]。孫建興[31]發明了一種強力破碎土壤的翻振機構。當開溝裝置開溝以后,山藥會留在中間土閥內,為了能將山藥及時從土壤中露出,在兩根連接臂上安裝有水平破土器,在其兩個連接臂的內側安裝有垂直破土器,水平破土器在軸筒上可以旋轉,在中間軸筒上有發射狀金屬桿,水平破土器接觸土閥上端通過旋轉能將之破碎,山藥將露出泥土;與此同時,垂直破土器有矩形鋼絲框旋轉,對中間土閥起到一個破碎翻撥的作用,使得山藥更好地露出泥土。對于該裝置,孫建興[32]還發明了一種翻土機構。山藥收獲機開完溝之后,該翻土機構在土閥下方,兩個翻土板上下交替轉動,上托板可以剖挖土閥并翻動,土壤會經過翻動變得疏松,同時山藥會被托起露出土壤,最后人工撿拾,這種裝置能降低山藥的損傷率,減輕勞動強度。郝建軍等[33]對于這種強力破土碎土裝置也有研究,他們發明的土壤翻振機構主要分為抖動驅動機構和剝土機構兩個部分,抖動機構主要采用偏心輪的原理,通過它的旋轉帶動擺動桿工作;而剝土機構主要是一對對稱設置的條形振動板,條形振動板后端沿均布向內側傾斜的剝土片,在工作的時候通過抖動機構產生振動,從而使得土壤與山藥分離,去除山藥兩側的土壤。刑旭等設計了4F-2型麻山藥的振動松土裝置,運用ADAMS軟件對整機前進速度、偏心輪旋轉速度和偏心距進行運動仿真分析,結果表明整機前進速度為3 m/min、偏心輪轉速為540 r/min、偏心距為50 mm時性能最優,輕松收獲山藥的同時,損傷率只有3.5%;楊發展等[34]設計了一種帶有格柵振動式挖掘鏟的土壤翻振機構,綜合運用SolidWorks里的Motion和Simulation插件,結合山藥農藝特點,對該部件進行了動力學仿真分析與計算,研究其振動頻率、振動幅度等相關機械結構參數,并得到了最優結構參數,最后進行了強度分析、計算和校核,最后通過試驗發現整體土壤破碎效果良好,完好率達到了89.2%。
3.5 定位系統
機械收獲山藥的時候,因為種植山藥行壟彎曲,山藥收獲裝置一般在機架后方,所以人在操作的時候難免會出現非直線行駛等問題,開出的溝偏離山藥行,會導致山藥漏收、損傷率大等問題。張自成[35]發明了一種用于根莖作物的收獲裝置,其挖土裝置靠近操縱臺,操作工人可以近距離直觀地看到山藥種植行與挖土機構的位置關系并可以及時調整,操作者可以準確操作,減少山藥的漏收率和損傷率。當然,對于山藥收獲機行駛偏移等問題,李善文等[36]發明了一種羅盤激光定位多功能山藥收獲機,利用羅盤激光可以對山藥收獲機的行走方向進行定位,結構簡單,可以滿足果蔬種植及工程機械管道開溝需要。
目前來說,國內研究者對于山藥機械化收獲并不是特別多,幾種山藥機械化收獲裝備典型成果及其關鍵技術對比如表3所示。
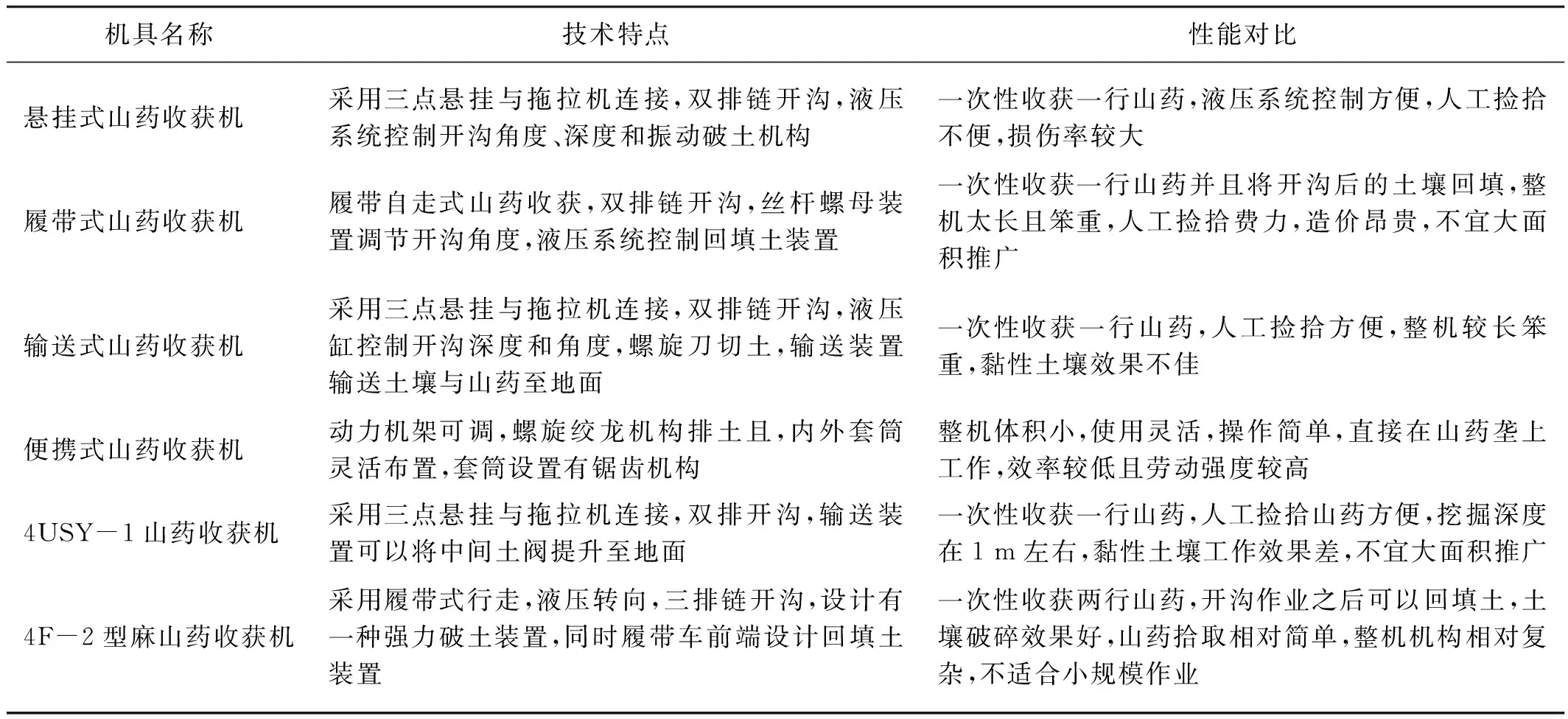
表3 我國山藥收獲機典型成果及其技術特點Tab. 3 Typical achievements and technical characteristics of Chinese yam harvester
4 國外山藥機械收獲裝備與技術研究進展
在20世紀40年代,歐美國家就開始了對根莖類作物收獲機的研究與推廣,實現了多種根莖類作物的機械化收獲[37]。尼日利亞是全球最大的山藥生產國,產量為全球市場的67%,21世紀初,尼日利亞學者Itodo等[38]對一種牽引式山藥收獲機的前進速度、提升角度、切削深度等進行了性能研究,通過山藥損壞的數量、收獲山藥的數量等指標對山藥收獲機進行評估,得出結論收獲機的行駛速度在3.2 km/h,深度為46 cm,提升角為20°時,山藥損傷率小,且提升角度對山藥的分離和損傷存在影響。
日本對山藥收獲的機械化也有一定研究,在21世紀初,日本山藥的機械化收獲也開始成熟。日本所種植的山藥同中國山藥不同,日本的山藥生長位置較淺、相對較粗,而且日本多為火山灰質土壤,兩者之間存在一定差異性,因此日本可以采用深埋根莖類作物的收獲機來收獲山藥。拖拉機帶著收獲機前進,土壤輸送裝置將山藥與土壤輸送到地面,人工只需要簡單的撿拾,損傷率低。日本有一家歷史悠久小型農機生產商生產的YCD-60型根莖類多功能收獲機可以收獲大蒜、牛蒡和山藥,其外形尺寸為2 350 mm×1 350 mm×1 590 mm,功率為50 kW,總損失率為5%,該機對山藥的損傷率小,勞動強度低,作業效率也相對較高。
5 存在問題
我國山藥種植歷史悠久,品種眾多,不同品種農藝特點、生長特點基本不一致,山藥本身脆性低、易斷,所以現在我國山藥機械化收獲面臨的主要問題:農機與種植環境融合不夠、種植模式不統一、收獲機具質量差、缺乏核心技術創新、收獲功能不完善。
5.1 機器與種植環境融合不夠
山藥生長在土壤以下,它的收獲方式受到其種植環境的影響非常大,因此機械化收獲也會受到種植環境的影響。我國幅員遼闊,但是山區占總面積的三分之二,地理環境、土壤特征尤為復雜,機器不能在部分地區靈活的行走,國內一些平原大面積種植的山藥收獲機基本不能用于丘陵、山地等復雜地形的收獲,同樣的機器在不同的土壤中收獲可能會出現不同的情況。因為我國這些特殊的種植環境,在山藥收獲裝備研發過程中,收獲機具能否適應多種地形的問題顯得尤為重要。
5.2 種植模式不統一
我國的山藥種植分散,種植規模也沒有糧食作物種植規模大,山藥品種多,再加上我國的農戶種植習慣不一,所以現在我國山藥的種植模式存在多樣性。比如種植山藥的時候,不同山藥品種的株距、行距、密度不同,沒有全國統一的種植體系,況且生長深度也存在差異。在收獲山藥的時候,同種機器收獲不同品種的山藥,會存在損傷率、漏收率高等諸多問題,對收獲的山藥質量造成很大影響,最后降低農戶的收入。
5.3 收獲機具質量差
山藥生長的深度差異很大,最多能達到1.5 m以上,機器的挖掘阻力較大,另外泥土里的雜物會對機具造成很大的沖擊,嚴重降低機具壽命。然而我國工藝制造水平相對于歐美等發達國家來說,存在著起步晚、基礎差、工藝制造水平較低等情況。因此我國的根莖類作物收獲機在復雜的土壤中工作會存在著質量差、可靠性低、能耗高等問題。
5.4 缺乏核心技術創新
我國在20世紀60年代開始引進根莖類作物收獲機械,對于山藥收獲機一直以來都是借鑒國內外其他根莖類作物等機具進行研發制造,國外的山藥收獲機一般都不能在我國得到廣泛的推廣應用。我國的山藥收獲機目前大部分還處于樣機試制階段,并不能真正大規模投入市場,現有山藥收獲設備存在機械化水平低、自主創新能力不夠等問題。
5.5 收獲功能不完善
就目前來說,我國現有的根莖類作物收獲機正處于發展時期,聯合收獲技術不夠成熟。我國山藥種植分散,小規模種植為主,研制的山藥收獲機一般都是中小型機器。國產的中小型機器結構簡單,不能完成所有收獲作業要求,山藥的收集存在一定的難度。
6 發展趨勢
6.1 因地制宜研制山藥機械化收獲設備
我國復雜的地理環境導致了山藥收獲的多樣化,這是未來發展山藥收獲機特點之一,在現有機型的基礎上,根據不同的地理環境,不斷完善改進,農機與地理環境能融合,做出真正讓農戶好用的收獲機。另外不同地理環境一般需要不同的收獲機具,機具之間原理、結構也有可能存在差異性,要做到因地制宜研制各種機型的收獲機械,還需要適當增加此行業的農機專家,為山藥機械化收獲設備的多樣性提供技術支撐。
6.2 推進種植規程建設
根據不同品種山藥的種植要求,通過相關專家協同合作,優化作物品種,研究制定規范化、標準化的山藥種植模式,加大資金投入提高所研發的收獲機具與農藝的適配性。與此同時積極引導農戶學習科學的種植模式、收獲技術,使用利于機械化收獲的種植模式。
6.3 學習借鑒發達國家的發展經驗
發達國家制造業起步早、基礎好、水平高,需要結合我國實際情況來提高機具質量。結合我國農業機械產業集群布局實際,將我國的高校、研究所和企業聯合起來,優化資源配置,逐步建設成區域性研究中心,提高工藝制造水平,提升收獲機械的零部件、元器件和整機制造的能力,增加產品的可靠性、安全性,讓山藥機械化收獲相關產品的研制與生產質量水平共同提高。
6.4 提高核心部件的創新能力
我國農機多借鑒國外技術,缺乏核心部件的自主創新能力,山藥機械化收獲核心部件主要在于開溝、土壤翻振、傳動等裝置。山藥收獲機功率消耗主要在于開溝、土壤翻振裝置,進一步對山藥收獲機開溝、土壤翻振裝置的工作機理進行分析研究,對于影響工作性能的運動和機構參數進行優化,有利于減少功率的消耗;對于傳動裝置的傳動軸、箱體、齒輪、鏈條等關鍵部件進一步研發,采用新的工藝、技術,不斷提高機器的可靠性、穩定性。深入加強產、學、研的結合,根據各方的優勢,將機械系統與液壓系統、電氣系統充分結合起來,使山藥收獲機更加智能化、輕便化,提高我國山藥收獲機械化程度,增加裝備制造的創新能力。
6.5 研制聯合收獲機
我國的山藥機械化收獲還是存在一些薄弱環節,現有的機器不能滿足實際生產需求,需要不少的人工輔助收獲,勞動強度依然很大。所以,研制一種集挖掘、莖土分離、分類、收集等功能的山藥聯合收獲機是非常有必要的,能大幅度降低勞動強度,解放我國勞動力。我國勞動力資源較為豐富,部分農戶對于山藥機械化收獲存在顧慮,研制可靠的聯合收獲技術增加農戶山藥機械化收獲的信心,讓我國真正成為農業強國。
