多模態感知反饋智能假肢手—回春妙“手”
2023-02-08 06:36:10長春理工大學
物聯網技術 2023年1期
關鍵詞:智能
長春理工大學
劉思成,焦 偉,韓 博
1 作品簡介
手是人類重要的運動執行器官之一,人類的大部分日常工作都是由靈巧的雙手獨立或協調完成的,如穿衣、端盤子、夾菜、刷牙等。人手包含拇指、食指、中指、無名指和小指五個手指,具有12個自由度,在大腦的精細控制下能靈巧地實現各種抓握運動。因而,對于截肢的患者來說,不僅會給他們的生活和工作造成巨大不便,更會給他們的精神和心理帶來極大的痛苦與煎熬。
本項目設計的產品只需要患者以圖1所示方式穿戴上假肢手,在未受傷處佩戴臂環即可使用,不僅能夠在外觀上填補患者缺失的肢體,而且在運動功能上也盡可能地做到與正常人手一致。智能仿生假手的研究和生產,不僅能促進模式識別、信息感知和智能控制等技術的進步,而且還對提高廣大截肢者的生活品質、增加就業機會、減輕家庭與社會的負擔、增進社會和諧等方面具有極其重要的社會意義。
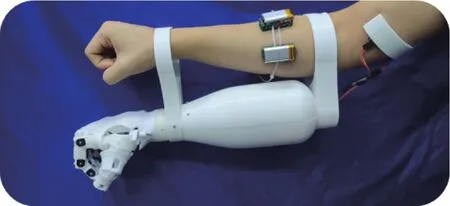
圖1 假肢系統整體實物
2 技術原理
佩戴者佩戴在手臂上的肌電傳感器采集的sEMG作為假肢手控制信號的來源,經過信號特征提取、模式識別之后輸入假肢手控制器控制假肢手的動作,具體流程如圖2所示。在假肢手進行如圖3所示的工作過程中,假肢手指尖上的力觸覺傳感實時檢測假肢手的狀態,并利用力觸覺反饋技術將假肢手的狀態反饋給佩戴者,佩戴者可以根據感知到的假肢手狀態及時調整控制策略,改善假肢手的控制效果,從而實現假肢手的可控性和可感性。

圖2 系統工作流程

圖3 假肢手拿螺絲刀示意圖
(1)基于肌電采集傳感器控制的假肢
將PNN神經網絡算法移植到硬件系統實現對肌電信號的實時分類,對8種日常動作的識別準確率達到90%以上。使用如圖4所示的自制肌電采集傳感器采集8路手臂肌電數據,對采集到的肌電信號進行高速的AD轉化,使用濾波和降噪算法實時處理帶有噪聲的肌電數據。對處理后的數據進行特征提取,將提取的特征輸入到神經網絡進行訓練,得到訓練模型后對肌電信號進行實時的手勢識別并控制假肢做出相應動作。

圖4 自制肌電信號采集器
(2)基于溫度和觸滑覺的感知反饋系統
通過薄膜壓力傳感器、溫度傳感器和壓電薄膜構建完整的假肢感知系統,并通過震動模塊的震動刺激、半導體制冷片的溫度制造和假肢指關節握緊完成感知反饋系統的搭建,補全肢殘患者的感知缺失,實現感知再現。
(3)多模態信息融合的控制系統
控制信號信息融合過程中,采用肌電信號與深度圖像相結合的方式控制假肢協調完成倒水、握手和傳遞等日常動作。本假手指尖處具有壓力傳感器,關節處具有角度傳感器,通過各類傳感器采集到的信息實現對假肢手的精準控制,并將傳感器測量的相關信息作為反饋信號輸入到控制器中,實現對假肢手的閉環控制。
(4)基于自學習的假肢手控制策略
商業化的肌電假肢手多為單自由度假肢手,采用一對肌電傳感器,并將其貼合在佩戴者手臂的一對拮抗肌上進行信號的測量,用于識別佩戴者的動作意圖。這種控制模式操作簡單方便,但實際應用中未充分考慮佩戴者肌電信號的個體差異性,給假肢手帶來了不便;并且不同佩戴者在同一部位測量得到的肌電信號強度差異較大,測量部位不確定同樣會造成肌電信號的差異,同一佩戴者在其手臂不同部位測量得到的肌電信號也存在差異。基于自學習的假肢手控制方法可以根據佩戴者的肌電信號動態調整假肢手的控制參數,使得殘疾人在安裝佩戴假肢手時無須進行參數調整,就可以在短時間內靈活自如地控制假肢手。
3 市場及應用前景
據統計數據顯示,2023年我國康復醫療產業規模有望超1 000億元,年復合增長率超18%。據不完全統計,目前全國有600多家各類假肢生產裝配機構,假肢產品的年產量為6.5萬件。按產品的平均壽命為3年計算,相當于只有88.5萬具假肢在使用中。這只能滿足930萬有配置假肢等輔助器具需求者的9.5%,尚有90.5%的需求者未能使用。由此可見,中國的假肢產量亟需增加。隨著社會經濟和人們生活水平的不斷提高,殘疾人的支付能力也日益增強,對假肢的需求不再局限于笨重的被動式假肢,假肢智能化、功能多樣化、性能優良化成為現在假肢行業發展的目標。
由于智能假肢技術在我國發展水平相對較低,市場人均規模小、智能假肢生產企業數量少、市場供給缺口大,供給明顯不足。據悉,我國智能假肢技術水平與發達國家存在著較大差距,仍處于亟待開發的狀態。智能假肢等康復醫療器械領域應當成為醫療器械發展的下一個著力點,市場前景廣闊。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44