基于物聯(lián)網的生產車間施工作業(yè)安全預警系統(tǒng)設計
2023-02-08 06:36:34張輝宜
物聯(lián)網技術 2023年1期
張輝宜,林 晨
(安徽工業(yè)大學 計算機學院,安徽 馬鞍山 243002)
0 引 言
生產車間特別是煉鋼生產車間的施工維護作業(yè)要求在不停產且施工單位不能改變現(xiàn)有生產設備位置、結構、操作以及運作方式的情況下進行,加上施工地點和施工時間的不固定性、施工任務的隨機性,以及工程作業(yè)、機械設備檢修任務的臨時性,特別是車間生產有行車重載、長距離、不定時、無規(guī)律來回作業(yè)、噪音大等特點,無論在運輸途中還是卸貨時,貨物的墜落、鋼水的溢出等情況都可能對施工地點工作人員造成一定的威脅[1]。為解決這些問題,在保證施工安全的前提下,設計了一套易安裝、便攜式的針對煉鋼生產車間的行車運行安全預警系統(tǒng),通過聲光報警方式提醒施工作業(yè)人員注意安全,并將預警數(shù)據(jù)上傳云數(shù)據(jù)庫,實現(xiàn)集團公司集中進行安全預警數(shù)據(jù)監(jiān)控。
1 整體結構
根據(jù)煉鋼車間實際生產的需要,該預警系統(tǒng)應該具備以下功能:(1)能夠自主測量行車與施工地點距離,并在小于安全距離時進行聲光報警;(2)預警系統(tǒng)需具備操作簡單、安裝簡易、移動便攜等特點;(3)可根據(jù)需要進行預警距離等參數(shù)設置。
系統(tǒng)硬件由兩大部分組成:輔助節(jié)點和主節(jié)點。輔助節(jié)點是控制鏈的末端,安裝在施工現(xiàn)場的左右兩側,由于行車在車間來回往復運動,故可將輔助節(jié)點的激光模塊對準行車操作室或行車上一個相對固定的點,便可實現(xiàn)行車與輔助節(jié)點之間距離的測量,輔助節(jié)點與主節(jié)點的距離根據(jù)施工現(xiàn)場情況決定,這個值不需要太精確。主節(jié)點安裝在施工現(xiàn)場實現(xiàn)與輔助節(jié)點的ZigBee協(xié)議數(shù)據(jù)通信以及與云服務器的4G數(shù)據(jù)通信。設備安裝示意圖如圖1所示。

圖1 預警系統(tǒng)安裝示意圖
通過圖1可知,單個施工地點需要左右兩個輔助節(jié)點來進行安全預警,由于存在多個廠區(qū)并且每個廠區(qū)又有多個施工地點,那么就需要通過多個主節(jié)點和輔助節(jié)點進行安全預警。整個安全預警系統(tǒng)架構如圖2所示。一個主節(jié)點下面有兩個輔助節(jié)點,輔助節(jié)點兩兩為一組,每一組代表一個施工地點,數(shù)據(jù)通過主節(jié)點4G模塊上傳云端,最后在PC端進行數(shù)據(jù)可視化。

圖2 系統(tǒng)總體結構
2 系統(tǒng)硬件組成
主節(jié)點和輔助節(jié)點分別采用STM32F103VET6和STM32F103C8T6微處理器作為主控芯片。輔助節(jié)點包括L1激光測距模塊、OLED顯示模塊、報警模塊以及ZigBee-CC2530終端。主節(jié)點包括ZigBee-CC2530協(xié)調器、724UGCAT1-4G模塊、TFT觸摸屏模塊和SP813看門狗電路。各個節(jié)點模塊之間功能獨立,通過不同的外設接口進行數(shù)據(jù)傳輸。主輔節(jié)點控制器通過外置引腳與各個模塊相連,實現(xiàn)其對各個模塊的命令控制和數(shù)據(jù)交換。主節(jié)點和輔助節(jié)點硬件組成如圖3所示。
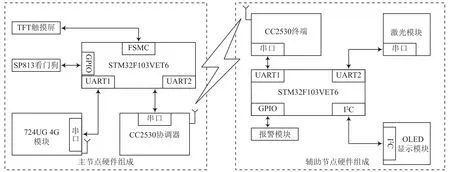
圖3 主節(jié)點和輔助節(jié)點硬件組成
激光測距模塊采用的是相位式激光測距傳感器,相位式測距方式相較于脈沖和三角測距方式有著高精度、高響應速度、強抗干擾性等優(yōu)勢[2-3],適合煉鋼車間這種復雜的生產環(huán)境。使用ZigBee終端和協(xié)調器則是利用其強大的組網功能,建立主節(jié)點與輔助節(jié)點之間的數(shù)據(jù)通信網絡[4]。施工地點與后臺服務器之間選擇合宙724UG-CAT1-4G模塊。模塊引出的串口做了電平轉化直接與主節(jié)點MCU的串口1通信,并且支持標準AT固件,能很方便地支持TCP/UDP/MQTT等協(xié)議與云服務器進行連接[5]。看門狗電路是在系統(tǒng)受到煉鋼車間電磁干擾后無法運轉時,能夠及時復位系統(tǒng),保證系統(tǒng)正常工作[6]。主節(jié)點觸摸屏程序用于設置各個輔助節(jié)點的報警閾值,輔助節(jié)點顯示模塊實時顯示該節(jié)點測距結果。另外,考慮設備的便攜性,輔助節(jié)點還可采用電池供電。
3 系統(tǒng)軟件設計
整個安全預警系統(tǒng)需要完成以下功能:預警功能、測距數(shù)據(jù)采集、數(shù)據(jù)通信、數(shù)據(jù)存儲及可視化。整個系統(tǒng)軟件流程如圖4所示。
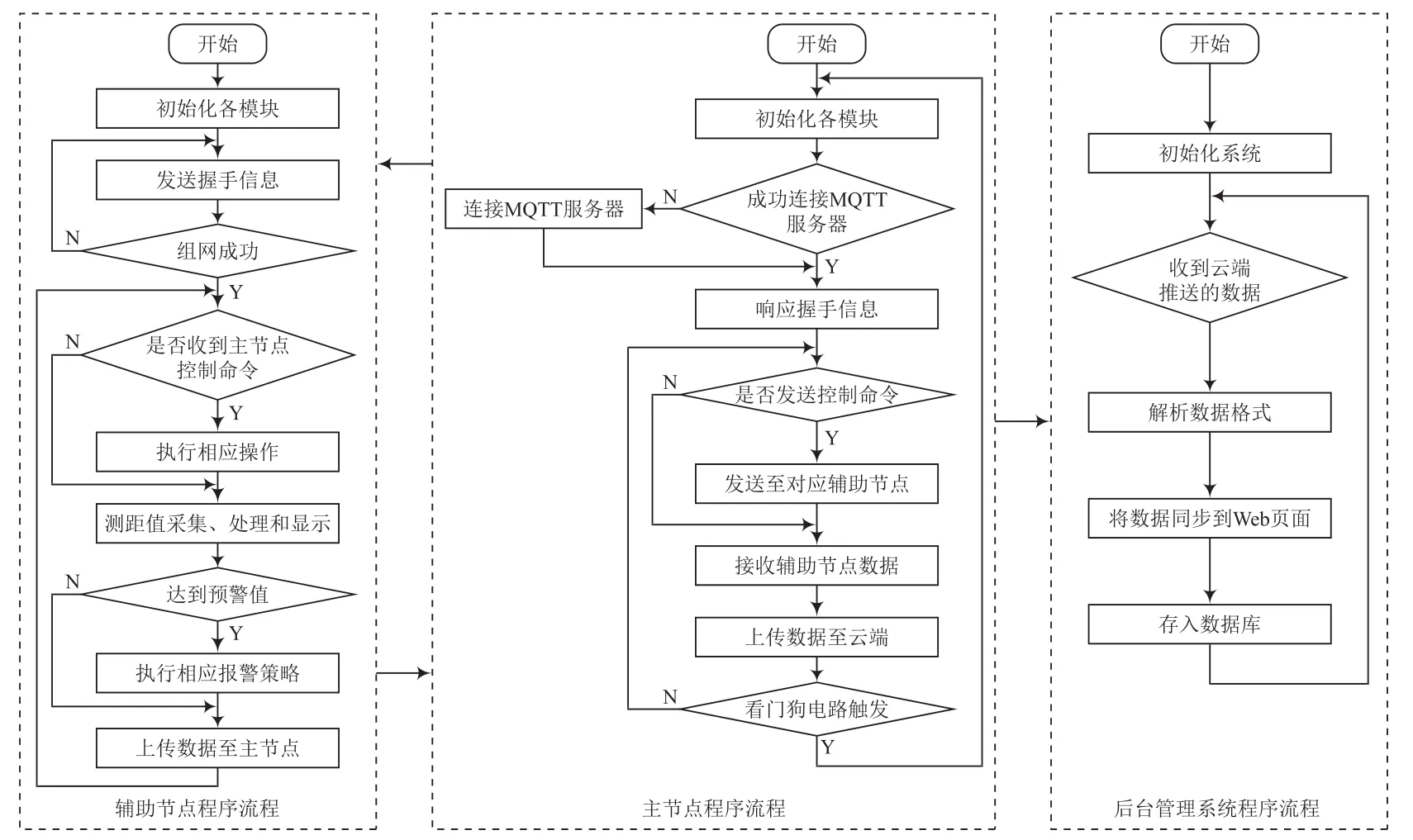
圖4 系統(tǒng)軟件流程
3.1 預警策略
報警模塊是由三個報警燈和一個報警器組成,報警燈有綠、紅、黃三種顏色。根據(jù)行車與施工地點距離的遠近劃分為兩個預警等級:I級和II級。用L1和L2分別表示觸發(fā)I級和II級預警時所對應的距離值,D表示激光模塊的測距值,其中L1<L2。行車與激光模塊的相對位置如圖5所示。系統(tǒng)報警策略設計如下:當測量距離值D>L2時,節(jié)點處于安全狀態(tài),綠燈亮起;當L1<D≤L2時,節(jié)點處于II級預警狀態(tài),黃燈亮,綠燈滅;當D≤L1時,節(jié)點處于I級預警狀態(tài),紅燈亮,黃燈滅,警報器響起。
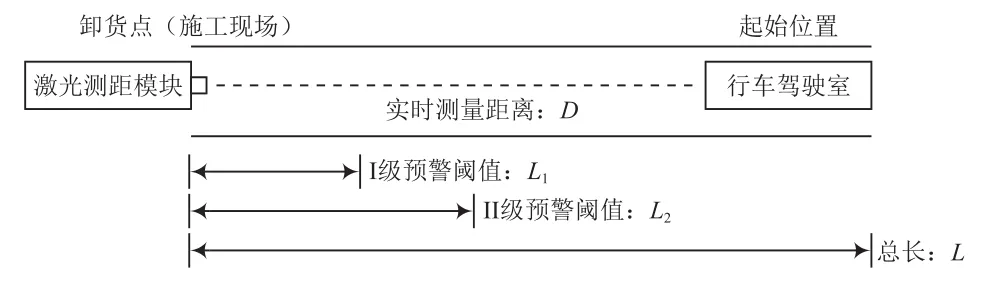
圖5 行車與激光模塊相對位置
3.2 數(shù)據(jù)采集
輔助節(jié)點MCU與激光模塊之間采用的是ASCII文本通信協(xié)議,通過串口2定時向激光模塊發(fā)送“iSM”字符文本控制其完成測距,然后輔助節(jié)點MCU對激光模塊返回的距離數(shù)據(jù)做出處理,判斷其值是否滿足觸發(fā)預警策略的條件。若滿足,報警模塊則執(zhí)行相應的報警操作。激光模塊串口通信參數(shù)見表1所列。

表1 激光模塊串口通信參數(shù)
3.3 ZigBee節(jié)點通信
主節(jié)點ZigBee協(xié)調器完成Z-Stack初始化,建立局域網等待輔助節(jié)點ZigBee終端加入[7];終端節(jié)點加入局域網之后,輔助節(jié)點MCU將預警數(shù)據(jù)和正常數(shù)據(jù)通過ZigBee終端發(fā)送至主節(jié)點。主節(jié)點觸摸屏模塊可以修改各個輔助節(jié)點的預警閾值,通過協(xié)調器發(fā)送至對應的終端。此外,當ZigBee協(xié)調器收到終端數(shù)據(jù)和主節(jié)點做出閾值修改操作時都會將對應數(shù)據(jù)通過4G模塊發(fā)送至后臺服務器。
3.4 4G模塊與云平臺通信
利用阿里云物聯(lián)網平臺將設備接入互聯(lián)網實現(xiàn)數(shù)據(jù)上傳,主節(jié)點與云平臺之間通過4G模塊以MQTT協(xié)議方式進行無線通信[8]。該協(xié)議是基于TCP/IP的上層協(xié)議,采用了Topic/Publish通信結構,適用于不同環(huán)境的嵌入式設備[9]。該模塊內置了MQTT協(xié)議棧,主節(jié)點MCU通過AT指令對其進行配置,實現(xiàn)主節(jié)點入網、連接云平臺、訂閱/發(fā)布消息等功能。
4 數(shù)據(jù)庫設計及可視化
4.1 數(shù)據(jù)庫設計
在數(shù)據(jù)庫設計上主要用到了兩張表:預警數(shù)據(jù)表和施工地信息表。預警數(shù)據(jù)包括預警時的距離值、預警時間、左/右節(jié)點、預警閾值以及施工地編號。施工地信息表主要包含施工地信息的簡介以及施工地編號字段。主節(jié)點在上傳數(shù)據(jù)時也會附帶施工地編號信息,在監(jiān)控平臺進行施工地預警數(shù)據(jù)的可視化展示時,預警數(shù)據(jù)將與施工地信息表中的施工地編號字段進行匹配,以便查找出相應施工地的預警數(shù)據(jù)。
4.2 數(shù)據(jù)可視化
為了方便企業(yè)集中管理,監(jiān)控平臺采用B/S架構并用JAVA語言開發(fā)[10]。監(jiān)控平臺具有施工地管理以及查詢預警數(shù)據(jù)等功能,其中施工地管理即是對施工地的增、刪、修改、查詢等操作,預警數(shù)據(jù)查詢功能分為實時數(shù)據(jù)和歷史預警數(shù)據(jù)查詢。施工地管理頁面如圖6所示。

圖6 施工地管理頁面
實時數(shù)據(jù)查詢頁面如圖7示,可以通過上方下拉框選擇不同的施工地進行查看。

圖7 實時監(jiān)控頁面
5 系統(tǒng)運行分析
系統(tǒng)測試選擇馬鋼第二煉鋼總廠的2#施工地,在該施工地架設好預警設備后進行了一段時間的運行測試。運行結果表明各功能模塊運行正常,后臺管理系統(tǒng)能夠正常顯示數(shù)據(jù)并對報警數(shù)據(jù)進行存儲和可視化。
打開歷史數(shù)據(jù)查詢頁面,選中該施工地,并點擊所選施工地歷史預警數(shù)據(jù),將彈出該施工地預警數(shù)據(jù)表格,如圖8所示。

圖8 馬鋼第二煉鋼總廠-2#施工地預警數(shù)據(jù)
在查詢條件欄日期選擇2022-04-19至2022-04-22,并點擊查詢會顯示相應日期內的預警數(shù)據(jù)表格,點擊柱狀圖則會顯示所選日期內該施工地預警次數(shù)柱狀圖,如圖9所示。
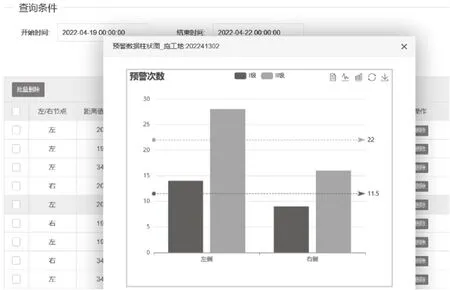
圖9 馬鋼第二煉鋼總廠-2#施工地預警次數(shù)
通過上述圖表可以看出,系統(tǒng)運行穩(wěn)定,性能良好。一方面,預警數(shù)據(jù)反映了各個施工地的安全狀態(tài),為工作人員對各個施工地做出針對性的安全管理提供了便利;另一方面,由于行車運載貨物到達施工地點時會觸發(fā)I級預警,所以這些圖表也側面反映了各個施工地行車的運行狀況,方便工作人員統(tǒng)計各個施工地行車運輸次數(shù)和工作效率。
6 結 語
為配合施工企業(yè)進行智慧工地建設,本文設計了一套基于物聯(lián)網的移動便攜式安全預警系統(tǒng),通過激光測距技術測量作業(yè)人員與行車之間的距離進行預警,以此保證施工人員的安全。系統(tǒng)架構是多主節(jié)點和多輔助節(jié)點的樹狀結構,采用STM32F103系列單片機為主控制器,通過ZigBee自組網方式完成主輔節(jié)點通信;然后通過主節(jié)點的4G模塊進行數(shù)據(jù)上傳,實現(xiàn)數(shù)據(jù)集中可視化。試運行結果表明,該系統(tǒng)具有安裝操作簡單、易于擴展等特點,可推廣應用于類似的生產場合。
猜你喜歡
北京測繪(2022年6期)2022-08-01 09:19:06
建材發(fā)展導向(2022年10期)2022-07-28 03:04:36
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
建材發(fā)展導向(2021年18期)2021-11-05 09:19:50
北京測繪(2021年7期)2021-07-28 07:01:18
建材發(fā)展導向(2021年9期)2021-07-16 07:11:36
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
傳媒評論(2019年4期)2019-07-13 05:49:14
中國房地產業(yè)(2016年2期)2016-03-01 01:25:48