窄體車主動側傾極限態動力學機理研究*
2023-02-13 01:38:14徐東鑫王國業
汽車工程 2023年1期
徐東鑫,王國業,王 亞
(1.中國農業大學工學院,北京 100083;2.北京坐騎科技有限公司,北京 101300)
前言
近年來,汽車保有量持續增長,其帶來的交通擁擠、能源危機與環境污染亟待解決,而大部分乘用車日常使用為單人或少人駕乘,存在大量空間及能源浪費。針對個人交通的窄體車輛有助于這些問題的解決[1],窄體車輛應用主動側傾技術,控制車身向彎道內側傾斜[2],利用重力產生的力矩平衡離心力矩而避免車輛側翻[3]。現階段對于窄體車的研究主要關注于其主動側傾的實現[4],應用主動側傾技術提高窄體車側翻安全性,但主動側傾窄體車附著極限態問題也是需要解決的突出問題,另外為進一步提高窄體車運動性能和未來自動駕駛技術[5-6]的引入,研究主動側傾窄體車附著極限動力學性能及控制具有重要價值。當輪胎與地面間達到附著極限,滑移率較大時,車輛進入附著極限運動狀態,簡稱極限態。極限態是一種危險工況,但如果加以控制利用,能顯著提升車輛運動性能,最大限度保證行車安全性。
專業車手可以通過手剎過彎、鐘擺過彎和延遲制動等操縱技能實現對賽車漂移、甩尾的準確控制,這對研究窄體車主動側傾極限態運動提供參考。專業賽車手根據駕駛經驗,一般通過控制后輪高滑移同時前輪轉向的方式,準確控制賽車漂移進入可控極限運動狀態。專業車手有手剎漂移與驅動漂移兩種方式,其中前輪都需具有轉向能力而后輪則需達到附著極限。普通乘用車極限運動時極易出現側滑和側翻事故,通過主動側傾控制可顯著降低窄體車側翻風險,但需要對主動側傾窄體車極限態運動機理及特性進一步深入研究。
對于一般乘用車在輪胎與地面間達到附著極限時,車輛維持穩定狀態時狀態參數的分析分為兩種:(1)根據考慮車輛縱向、側向及橫擺運動的車身3 自由度模型,獲得車輛狀態參數變化率為零即穩定狀態時車輛狀態參數值;(2)根據整車動力學模型,對車輛處于某路面條件時的相平面圖分析獲得平衡點位置。Gerdes 等[7-8]認為車輛縱向速度、側向速度和橫擺角速度穩定時車輛可維持輪胎與地面間達到附著極限同時以某固定姿態運動,分析后輪驅動車輛在高側滑角轉彎時的動力學特性;此外,Velenis[9-11]、Khan[12]和Milani[13]等同樣應用車身3 自由度模型,對理想極限態運動所需的轉向條件進行數值計算。Bobier 等[14]利用橫擺角速度—質心側偏角相平面,分析輪胎與地面間達到附著極限時平衡點狀態。參考常規窄體車極限態運動分析,可分析窄體車主動側傾極限態運動機理,但由于其具有主動側傾特性,窄體車側傾動力學特性與常規窄體車存在一定差異。
由于窄體車主動側傾特性,其極限態運動與常規窄體車不同。建立結合UniTire 輪胎模型的非線性動力學模型并考慮由縱向運動、側向運動以及主動側傾引起的垂向載荷轉移,分析窄體車主動側傾極限態穩態運動機理以及狀態參數相平面,并說明窄體車主動側傾在輪胎與地面間達到附著極限時其極限態運動特點。
1 窄體車主動側傾非線性動力學建模
為精確描述窄體車主動側傾運動,根據窄體車主動側傾運動特點,結合非線性輪胎模型,建立整車動力學模型。
1.1 整車動力學建模
所研究窄體車(如圖1 所示)具有主動側傾特性,為表述窄體車極限態運動特點,建立如圖2 所示的動力學模型,其縱向運動、側向運動、橫擺運動和側傾運動的動力學方程如式(1)-式(4)所示。其中,主動側傾窄體車的側傾運動由基于規則的主動側傾控制器實現特定規律的車身側傾角度,因此式(4)可獨立解析。

圖1 主動側傾窄體車
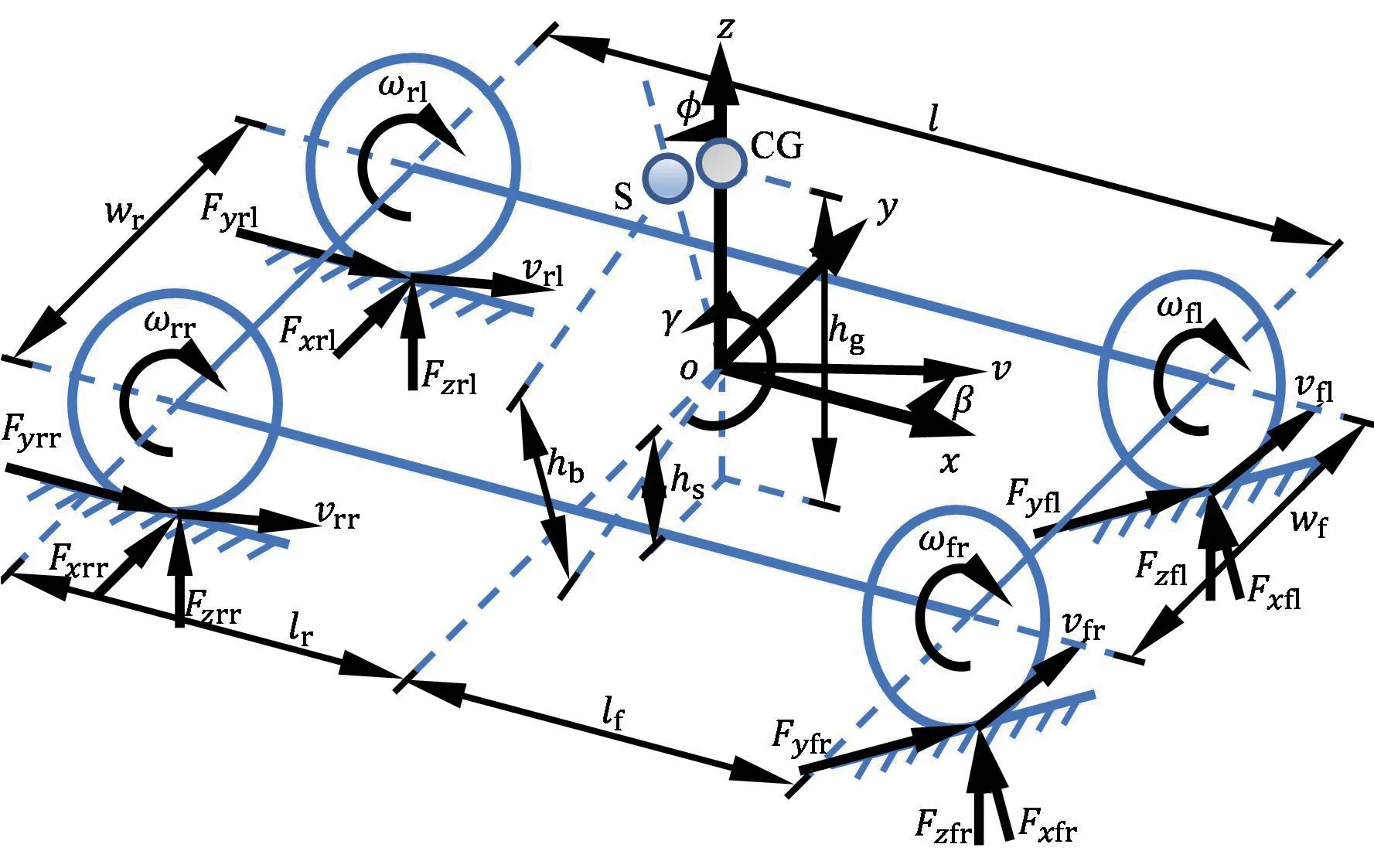
圖2 整車動力學模型


式中:m、mb分別為整車質量和車身質量;δf為前輪轉向角;δfl與δfr滿足阿克曼轉向關系;vx、vy分別為車身質心處的縱向及側向速度,vy=vxtanβ;β為質心側偏角;γ為橫擺角速度;φ為車身側傾角;Fd為空氣阻力,Fd=為空氣阻力系數,Af為迎風面積;Fkij為各輪胎與路面的各向力(k為x、y、z表示方向,i為f、r區分前后軸,j為l、r區分左右輪);li為整車質心到前后軸的距離;wi為前后軸輪胎的距離。
在路面附著條件一定時,輪胎垂向載荷決定輪胎接地面極限附著力[15]。窄體車主動側傾極限態是輪胎與地面間達到附著極限時的車輛運動,因此垂向載荷分布對窄體車主動側傾極限態運動有重要影響。由于窄體車主動側傾具有主動側傾特性,因此除縱向運動、側向運動引起的載荷轉移外,還存在其主動側傾引起的載荷轉移,其垂向載荷滿足:
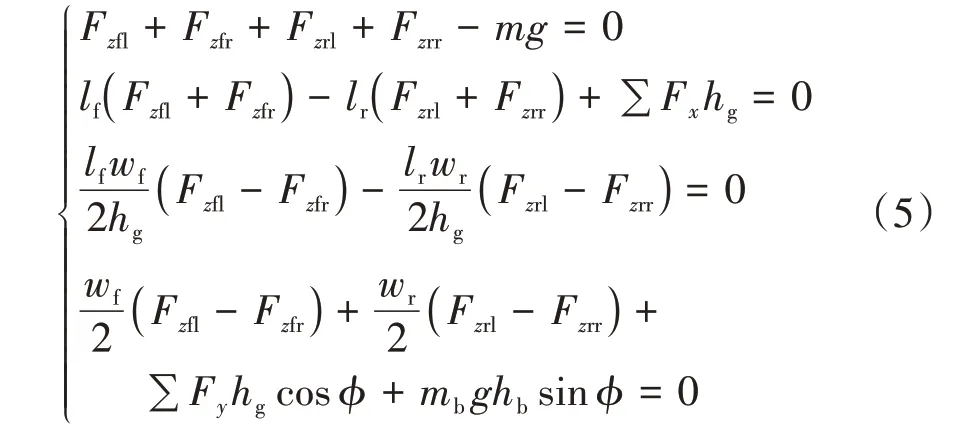
式中:hg為整車質心高;hb為車身質心到側傾軸線的距離。
1.2 輪胎力分析
進行極限態運動時,輪胎具有強非線性,且處于側偏縱滑復合工況,參考能精確描述輪胎在復雜工況下的力學特性的UniTire 統一輪胎模型[16-17],對窄體車主動側傾極限態時輪胎力進行分析。
輪胎的縱向和側向滑移率Sxij和Syij為

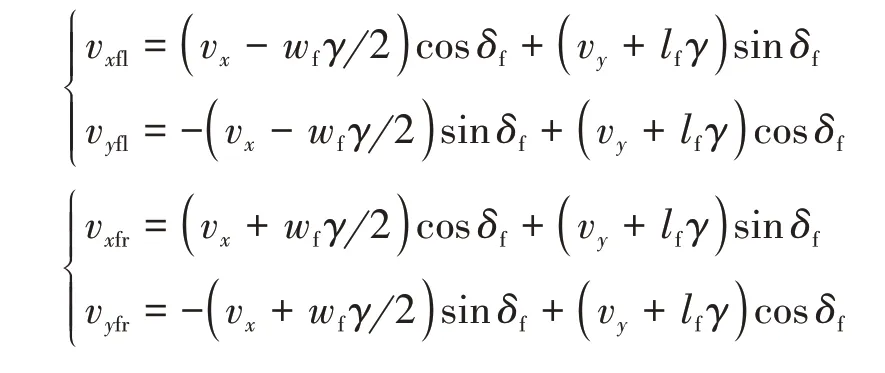
式中:reij為有效滾動半徑;ωij為車輪的旋轉角速度;vxij和vyij分別為車輪運動速度vij在輪胎坐標系縱向及側向的分量。前后軸各輪輪速表達式如下:

輪胎相對縱向、側向和綜合滑移率φxij、φyij和φij為
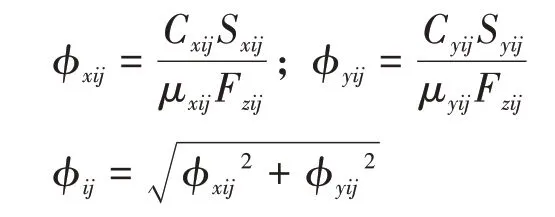
式中:Cxij、Cyij分別為輪胎縱滑、側偏剛度,與輪胎垂向載荷等相關;μxij、μyij分別為輪胎與路面間的縱向、側向摩擦因數,與輪胎滑移率等相關。

根據UniTire 統一輪胎模型分析,僅考慮輪胎主要力學特性即縱側向受力情況,輪胎與地面間的縱向力Fxij、側向力Fyij和總切力Fij之間滿足:

UniTire輪胎模型基本式[16-17]為

式中:Eij為總切力曲線的曲率因子,與輪胎垂向載荷及滑移率等相關;λdij為方向因子[16],能準確表達總切力方向的變化趨勢。

式中:φcij為臨界滑移率;nij為模型參數。
2 主動側傾窄體車極限態穩態運動機理
穩態圓周運動時,車輛以恒定速度vs繞某一點做恒定半徑Rs的圓周運動,則存在恒定縱向速度、恒定側向速度、恒定質心側偏角βs、恒定車身側傾角φs及恒定橫擺角速度γs且。那么此時,加速度v˙等參數滿足:

考慮窄體車主動側傾實際控制中僅對前后軸車輪分別控制并不對左右側車輛分布控制,在穩態圓周運動時,窄體車主動側傾動力學模型變為
2.1 后軸輪胎作用力分析

在附著極限狀態時,窄體車主動側傾極限態運動,前后軸輪胎與地面間均處于附著極限狀態,結合式(6),穩態時后軸輪胎縱向合力及總切力滿足:
式中:μr是后軸處的附著系數是穩態附著極限狀態時后軸處的垂向載荷。結合式(11)~式(14),得到窄體車主動側傾極限態穩態運動時后軸輪胎作用力。
2.2 前軸輪胎作用力分析
式(8)與式(9)聯立可得前軸輪胎總切力:

由于前軸輪胎處于附著極限,結合式(5)可知,前軸輪胎側向合力、縱向合力和總切力為

式中:μf是前軸處的附著系數;是穩態附著極限狀態時前軸處的垂向載荷。
車輛進行主動極限態運動時,前輪處側向滑移率φxf相對較小,式(16)可變為

分析窄體車極限態穩態運動時前軸輪胎作用力時,將式(12)、式(15)及式(17)相結合。
基于上述分析,根據式(5)中對于左右載荷轉移的表述,對穩態時前后軸左右側輪胎垂向載荷進行分析,結合UniTire 輪胎模型式(7)匹配計算,獲得窄體車主動側傾進行極限態運動時前后軸左右側輪胎力。
3 窄體車主動側傾極限態相平面分析
根據整車非線性動力學模型,若前輪轉向角固定,根據輪胎與地面附著極限態動力學分析,獲得前后軸左右側輪胎各方向作用力,在其縱向行駛速度恒定的工況下,其微分方程可表示為自治系統,進行相平面分析。
3.1 常規窄體車極限態運動相平面
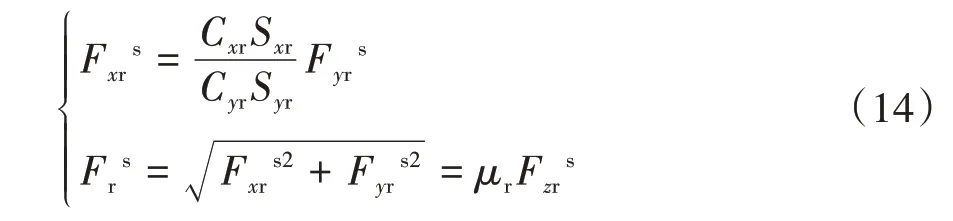
對常規窄體車進行分析時,式(1)-式(4)表示其整車系統。為清晰表明常規窄體車與主動側傾窄體車狀態參數變化規律,采用相同的車輛參數,如表1所示。通過控制輪胎滑移率,使得窄體車實現輪胎與路面間達到附著極限,其質心側偏角速度-質心側偏角度相平面見圖3(a),其橫擺角速度-質心側偏角相平面見圖3(b)。在以5 m/s 縱向速度在附著系數為0.75 的路面進行極限態零轉向行駛時,常規窄體車平衡狀態時質心側偏角速度為零,中心平衡點的質心側偏角與橫擺角速度均為零是直線行駛狀態;非中心平衡點關于原點對稱均為圓周運動,且質心側偏角分別為0.33、-0.33 rad,相應的橫擺角速度分別為-1.75、1.75 rad/s。
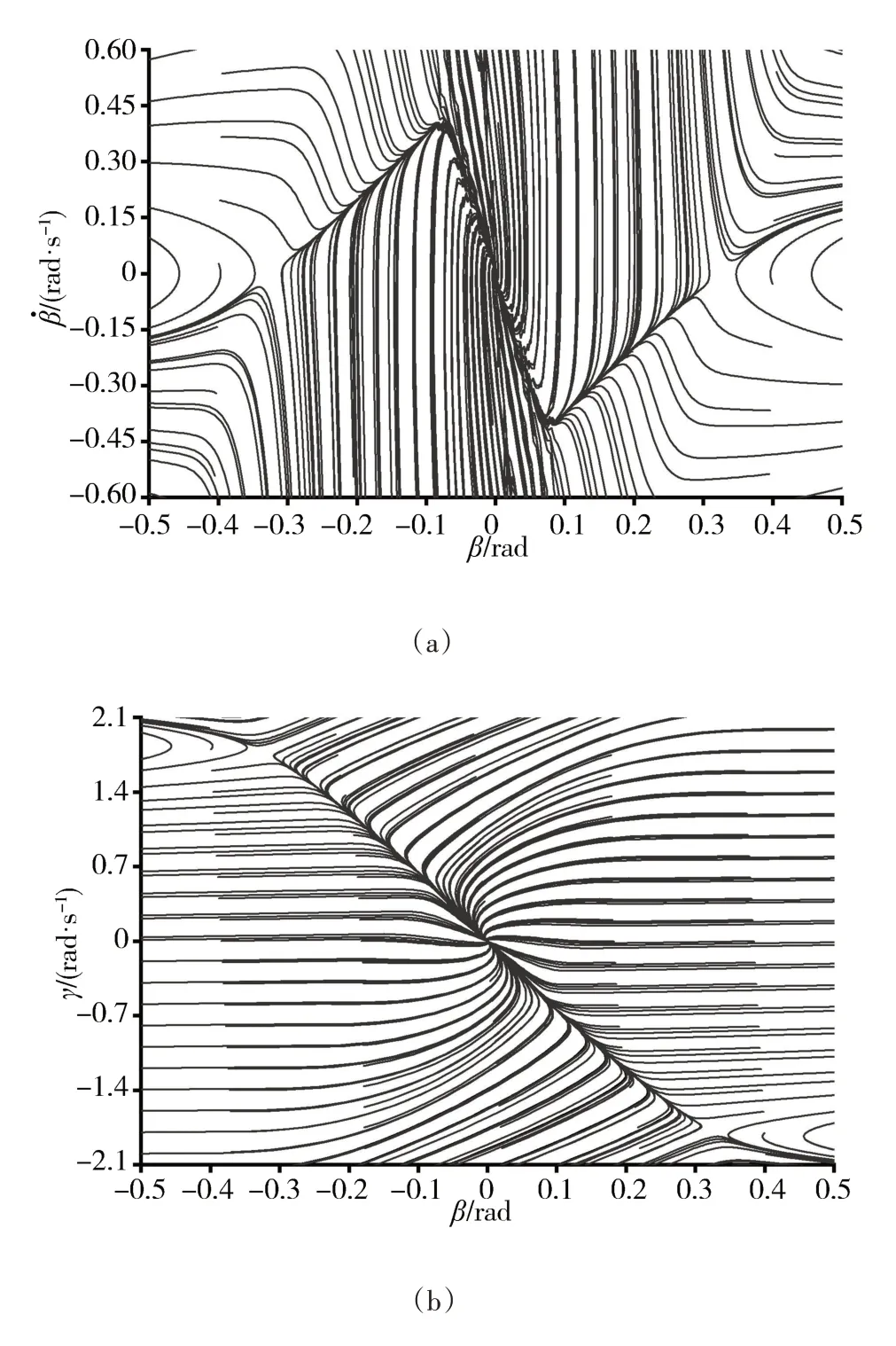
圖3 常規窄體車極限態狀態參數相平面

表1 窄體車主要參數
3.2 窄體車主動側傾極限態運動相平面
窄體車主動側傾運動由相應控制器和電機實現,其車身側傾角度與行駛速度及軌跡半徑相關[2]且相對穩定。對窄體車主動側傾狀態參數相平面分析時,考慮與常規窄體車相同工況運動時狀態參數的變化情況,如圖4 所示,主動側傾窄體車車身側傾角度根據主動側傾特性[2]φ=arctan(v2/g/R)計算得到,側傾角方向隨軌跡方向變化,且認為主動側傾控制器能實現目標側傾的穩態運動。在以5 m/s 縱向速度在附著系數為0.75 的路面,通過控制輪胎滑移率使得輪胎與路面間達到附著極限進行極限態零轉向行駛時,與常規窄體車相似,主動側傾窄體車平衡狀態時質心側偏角速度為零,中心平衡點的質心側偏角與橫擺角速度均為零是直線行駛狀態,非中心平衡點關于原點對稱均為圓周運動;但區別于常規窄體車,主動側傾窄體車非中心平衡點處質心側偏角與橫擺角速度均向中心原點趨近。

圖4 窄體車主動側傾零轉向狀態參數相平面
主動側傾窄體車處于非零轉向時,通過控制輪胎滑移率使得輪胎與地面間達到附著極限進行極限態運動,獲得其狀態參數變化相平面,如圖5 中前輪轉向角為0.18 rad,圖6 中前輪轉向角則為-0.18 rad。對比圖4,主動側傾窄體車以5 m/s 縱向速度在附著系數0.75 的路面極限態運動時,當前輪轉向角為0.18 rad 時,其狀態參數變化規律與零轉向不同,其中心平衡點相對原點存在偏移,橫擺角速度為0.42 rad/s,且偏移方向與前輪轉向方向相同;當前輪轉向角為0.18 rad 時,與零轉向相比,狀態參數非對稱變化,非中心平衡點位置不再相對中心平衡點對稱,且軌跡方向與轉向方向相反的非中心平衡點(質心側偏角為0.46 rad,橫擺角速度為-1.45 rad/s,軌跡半徑為-3.85 m)與中心平衡點的偏移量更大;根據圖5 與圖6,當前輪轉向方向相反時,主動側傾窄體車狀態參數變化對稱。

圖5 窄體車主動側傾前輪左轉時狀態參數相平面

圖6 窄體車主動側傾前輪右轉時狀態參數相平面
根據非線性系統平衡點的定義[18],窄體車主動側傾極限態穩態運動狀態為其狀態參數相平面平衡點狀態。當前輪零轉向時,主動側傾窄體車非中心平衡點比常規窄體車狀態參數絕對值略小;當前輪以相同角度相同正反向轉向時,窄體車主動側傾狀態參數變化對稱且有與轉向方向相同的狀態偏移。
4 窄體車主動側傾極限態運動分析
4.1 窄體車主動側傾極限態運動機理
根據第2 節對窄體車主動側傾穩態運動的描述,認為其穩態運動軌跡方向與橫擺角速度方向相同;并根據對窄體車主動側傾極限態穩態運動機理,對不同路面附著條件下,窄體車主動側傾實現不同軌跡半徑的極限態穩態運動狀態參數值解析。
路面附著系數為0.6 時,窄體車主動側傾狀態參數變化如圖7 所示。窄體車主動側傾可在一定速度范圍內做軌跡半徑|R|穩態圓周運動,其輪胎與地面間達到附著極限時軌跡半徑|R|及其范圍隨行駛速度v增大而增大,當行駛速度v=5.0 m/s時其輪胎與地面間達到附著極限時軌跡半徑|R|∈[4.30,6.30] m,當行駛速度v=7.5 m/s 時,其輪胎與地面間達到附著極限時軌跡半徑|R|∈[9.60,14.20] m;其輪胎與地面間達到附著極限時的橫擺角速度|γ|與軌跡半徑|R|負相關,且附著極限態穩態軌跡半徑|R|的范圍隨橫擺角速度|γ|增大而減小,當橫擺角速度|γ|=1.00 rad/s時軌跡半徑|R|∈[5.10,8.25]m,當橫擺角速度|γ|=1.60 rad/s 時軌跡半徑|R|∈[2.00,2.65] m;車輛質心側偏角度β及前輪轉向角δf與其輪胎與地面間達到附著極限時軌跡半徑R變化無明顯相關關系;在軌跡方向相同時,前輪轉向角δf與質心側偏角β具有正相關關系;結合軌跡半徑與行駛速度及橫擺角速度相關關系,車輛行駛速度v與橫擺角速度|γ|存在一定負相關關系。

圖7 附著系數0.6時,窄體車主動側傾極限態穩態參數
路面附著系數為0.9 時,窄體側傾車狀態參數變化如圖8 所示,其在相同附著條件下狀態參數變化規律與圖6相同。但當路面附著系數為0.9時,行駛速度v=5.0m/s,其輪胎與地面間達到附著極限時軌跡半徑|R|∈[2.95,5.20]m;行駛速度v=7.5m/s,其輪胎與地面間達到附著極限時軌跡半徑|R|∈[6.45,11.70]m。對比圖7 與圖8,可發現,路面條件變好,窄體車主動側傾在相同速度v行駛時,其輪胎與地面間達到附著極限時軌跡半徑|R|變小,車輛質心側偏角度|β|、橫擺角速度|γ|區間存在一定偏移,前輪轉向角度δf區間變小。結合圖7 與圖8,窄體車主動側傾其輪胎與地面間達到附著極限時,其橫擺角速度|γ|較大,其穩態運動狀態是相平面中的非中心平衡點狀態。
圖8 附著系數0.9時,窄體車主動側傾極限態穩態參數
4.2 窄體車側傾極限態運動機理結果分析
基于上述對窄體車側傾極限態運動機理結果及其狀態參數變化規律的分析,對狀態參數變化規律進一步說明。
對窄體車輛實現半徑相同(如|R|=18 m)方向不同的極限態運動進行分析狀態參數及控制參數如圖9 所示。其中,后輪縱向滑移率為TYDEX 縱向滑移率κrj=,根據UniTire 模型匹配計算為圖9(d)。當其輪胎與地面間達到附著極限時軌跡半徑相同時,窄體車主動側傾質心側偏角β關于隨前輪轉向角δf的增大主要表現為增大的趨勢,但在行駛速度v較大時存在一定減小趨勢,其橫擺角速度|γ|與前輪轉向角δf正相關;窄體車主動側傾在其輪胎與地面間達到附著極限進行軌跡方向相反的極限態運動時,其狀態參數與控制參數的變化曲線對稱,當前輪轉向角較大時車輪輪胎力的極限態理論分析值與UniTire模型匹配值存在偏差。

圖9 忽略左右載荷轉移時極限態穩態參數
對比常規窄體車不具備主動側傾功能時其車身側傾角度、車輪載荷轉移量以及輪胎側向滑移率(圖10),窄體車主動側傾極限態狀態(圖11)進行分析。根據圖10(a)常規窄體車側傾角度小于0.3 rad,根據圖11(a)窄體車主動側傾角度比常規窄體車側傾角度值較大且方向相反;根據圖10(b)與圖11(b),窄體車主動側傾可降低左右側車輪載荷轉移量,比常規窄體車不易出現單側車輪離地的情況,其抗側翻能力提高,更適合研究輪胎與地面間達到附著極限的極限態工況;根據圖10(c)與圖10(d)及圖11(c)與圖11(d),窄體車主動側傾輪胎側向滑移率與常規窄體車輪胎側向滑移率基本相同。窄體車主動側傾雖然使得其側傾角度與常規窄體車不同,且降低左右側車輪載荷轉移量提高抗側翻安全性,但其主動側傾特性并沒有對輪胎滑移率等極限態運動狀態有較大影響。

圖10 常規窄體車極限態參數

圖11 具有主動側傾功能窄體車極限態穩態參數
5 結論
本文中以采用主動側傾技術具有一定防側翻功能的窄體車作為研究對象,分析輪胎與路面間達到附著極限時的危險工況下極限態運動的機理及特性。通過建立基于主動側傾控制的考慮縱向、側向、橫擺及車身側傾的整車非線性模型,分析窄體車主動側傾極限態穩態運動機理及極限態狀態參數相平面特性。窄體車在通過控制輪胎滑移率使得其輪胎與地面間達到附著極限實現極限態運動工況下,狀態參數維持相對穩定時的穩定運動狀態是其極限態運動相平面的平衡點狀態。根據窄體車側傾極限態運動機理及相平面分析,可得到窄體車主動側傾極限態運動特性。窄體車主動側傾極限態運動時狀態參數變化規律與常規窄體車存在一定差異,但其穩態極限態時除車身側傾角度外,車輛及車輪狀態參數未有顯著變化,主動側傾特性對極限態運動狀態影響不大,且由于主動側傾特性其極限態運動控制更易于實現,因此安全性更高。
