路面沖擊輸入下車內噪聲主動控制*
2023-02-13 01:38:40王智豪徐中明夏子恒王虎成黃佳聰
汽車工程 2023年1期
關鍵詞:信號
王智豪,徐中明,夏子恒,王虎成,黃佳聰
(重慶大學機械與運載工程學院,重慶 400030)
前言
車內噪聲性能一直以來都是汽車NVH 行業內非常關心的一個問題。隨著國內汽車NVH 行業的快速發展,車內動力系統相關的NVH 性能已經取得了良好的成績。并且隨著汽車電動化的到來,與動力系統有關的噪聲甚至會逐漸從車內消失[1],因此,車內道路噪聲控制的好壞將會是決定車內噪聲性能高低的關鍵。車內道路噪聲主要是由輪胎與路面摩擦時,出現輪胎溝槽的氣泵現象和胎壁振動產生的,通過車身和懸架等結構傳遞到車內的低頻噪聲[2]。研究表明,基于聲波的疊加原理,通過控制揚聲器發出一個與初始噪聲幅值相等且相位相差180°的聲波,并與初始噪聲進行干涉抵消,從而實現“以聲消聲”目的的噪聲主動控制(active noise control,ANC)方法針對這種低頻結構噪聲有著良好的控制效果[3]。
車內噪聲主動控制,自提出以來已經有了許多學者和科研單位開展了諸多研究[4-8]。Oh 等采用前饋濾波-x 最小均方誤差(filterd-x least mean square,FxLMS)算法,通過使用4 個加速度參考信號,在粗糙路面上將車內道路噪聲在50~500 Hz 范圍內最大下降了6 dB[9]。Jung 等使用多通道前饋控制與遠程傳聲器相結合的頭枕主動噪聲控制系統,對一輛越野車座艙內1 000 Hz以內的噪聲實現了約3.7 dB的降噪量[10]。張立軍等基于歸一化的FxLMS 算法,在破損的粗瀝青路面上取得了良好的效果[11]。上述研究都是以最小均方誤差為準則的FxLMS 算法為基礎的。
然而,汽車實際行駛的道路往往是復雜多變的,尤其是在路況變化時遇到短暫的沖擊時(例如通過橋梁連接處或過減速帶),基于傳統FxLMS 算法的路噪主動控制系統魯棒性較差[12],在收斂過程中容易出現發散導致收斂失敗的問題,進而產生刺耳的噪聲,嚴重影響車內人員的駕駛感受和乘坐舒適性,在實車應用中有較強的局限性。
針對沖擊工況下控制失效的問題,建立了基于濾波-x 最小平均絕對偏差(filterd-x least mean absolute deviation,FxLMAD)算法的車內路噪主動控制系統。采集沖擊路面輸入下的車內噪聲并對其進行相關分析,從理論上說明FxLMAD 算法對沖擊工況路面噪聲主動控制的有效性。接著建立傳統FxLMS 和歸一化FxNLMS 與FxLMAD 算法的理論模型,分析不同算法的計算復雜度。然后將實車所采集的車內噪聲數據作為輸入進行仿真分析,驗證其魯棒性和計算復雜度及FxLMAD 算法的降噪效果。最后,基于數字信號處理器(digital signal processing,DSP)搭建車內噪聲主動控制試驗系統,實車道路試驗證明基于FxLMAD 算法的車內路噪主動控制系統在沖擊工況下的有效性。
1 路面沖擊輸入下車內噪聲分析
1.1 路面沖擊輸入下車內噪聲采集
在實際應用中,道路噪聲常常會伴有不同程度的沖擊,這類信號具有顯著的尖峰,呈現脈沖性,因此不符合高斯分布。為分析沖擊工況下道路噪聲特性,采集試驗車輛的路噪并進行相關分析。
參照 GB/T 18697—2002 《聲學汽車車內噪聲測量方法》,在主駕駛位頭枕左右耳位置處分別布置1個傳聲器,采集車內噪聲信號。試驗中采用NI DAQmx 數采設備和MPA416 型傳聲器,相關硬件設備和傳聲器如圖1 所示,采樣頻率為51.2 kHz,采樣時長為10 s。

圖1 數采和傳聲器布置
試驗路面為干燥粗糙的平直瀝青路面,天氣晴朗無風,車窗關閉。車內乘坐駕駛員與后排測試人員兩人,行駛速度為勻速50、60、70、80 km/h,在同一車速下采集兩組通過該路段的數據以便分析。數據采集是在粗糙瀝青路面中某段包含沖擊的路段中進行,如圖2所示。

圖2 數據采集路面
1.2 路面沖擊輸入下車內噪聲特性分析
以60 km/h 勻速行駛時采集的車內噪聲為例進行時域和頻域分析,所得結果如圖3 所示。可以看出車輛在第8 s 時遇到強沖擊,頻率在150 Hz 以內。200 Hz 附近的空腔聲較為突出,整體來看車內路噪以低頻結構噪聲為主,集中在300 Hz 內,部分低頻空氣噪聲分布于300~500 Hz頻率區間。

圖3 沖擊路噪特性分析結果
考慮到根據高斯模型推導出的FxLMS 算法對沖擊噪聲存在控制失效,因此需要確認上文采集到的噪聲信號是否服從高斯分布。QQ 圖(quantilequantile plots)是統計學里常用的判別某一組數據是否來自某個分布的方法。將該噪聲時域數據作為輸入樣本進行統計學分析,繪制的QQ 圖如圖4 所示,與標準的正態分布相比,輸入樣本的QQ 圖在兩端相差極大,顯然該樣本的統計特性與高斯分布有著明顯差別,對于這類非高斯統計特性的信號將不能采用基于高斯分布模型所設計的控制器來控制。
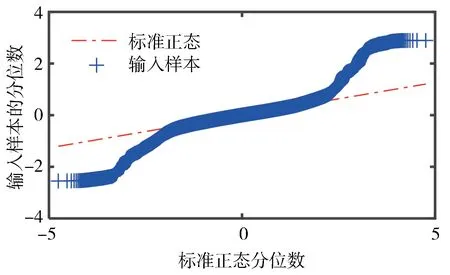
圖4 60 km/h沖擊路噪時域數據QQ圖
汽車經過沖擊性路面產生的脈沖性噪聲為偏離平均值的異常大幅值信號,這些異常值使得整個樣本的概率密度函數(probability density function,PDF)具有尖峰和厚尾的統計特征。對于這類樣本,通常使用α穩定分布來描述[13],α∈(0,2]是α穩定分布主要特征參數之一,α越小,該分布的PDF 有越厚的拖尾,表示遠離中心位置樣本的概率越大。為更直觀地展示該噪聲的非高斯性,繪制噪聲數據的直方圖和正態分布與α穩定分布的擬合曲線,如圖5(a)所示。曲線的橫坐標表示該噪聲數據的幅值大小,縱坐標表示對應幅值在整個數據樣本中出現的次數。從圖中可以看出,相較于正態分布,α穩定分布可以更好地描述噪聲數據的尖峰特征;同時對于兩端的尾部數據來說α穩定分布具有更好的擬合精度。以前文分析的噪聲數據作為輸入樣本,使用核平滑函數估計輸入樣本的PDF,接著繪制出輸入樣本對應的正態分布與α穩定分布的PDF,如圖5(b)所示,分別計算出兩種分布相對于輸入樣本PDF 的R2,其中α穩定分布的R(S)2=0.99明顯高于正態分布的R(N)2=0.90,充分說明了對于路面沖擊輸入下車內噪聲使用α穩定分布來建模能取得更準確的結果。

圖5 兩種分布的擬合對比圖
α穩定分布的另一個重要特征是不存在有界的2 階矩,α穩定分布樣本的p階矩僅當p≤α時存在[14]。而傳統的噪聲主動控制算法(FxLMS)都是以殘余誤差的2階矩最小化為準則,在對符合α穩定分布的樣本控制時,這些算法的降噪性能將會顯著降低。
對上文1.1 節采集到的不同車速下的車內道路噪聲使用α穩定分布進行擬合,得到對應的α特征值,具體數值如表1 所示。可以看出,表內的α特征值均小于1.7,說明車速在50~80 km/h 通過該沖擊性路面輸入路段的車內道路噪聲均含有一定程度的脈沖性,并且隨著車速的提高,α特征值逐漸降低,路噪信號脈沖性變強,這與車內人員的聽覺主觀感受保持一致。

表1 不同工況路噪α特征值
2 車內噪聲主動控制算法
2.1 多通道噪聲主動控制系統
經典的多通道車內噪聲主動控制系統框圖如圖6所示。
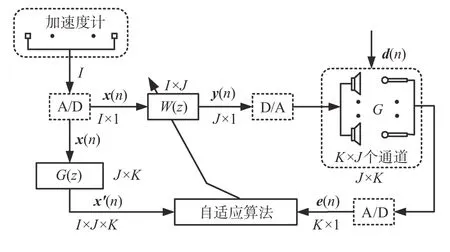
圖6 車內路噪主動控制系統框圖
圖中x(n)=[x1(n),x2(n),…,xI(n)]T為I個參考傳感器獲取的參考信號;d(n)=[d1(n),d2(n),…,dK(n)]T為K個誤差傳感器處的噪聲期望信號;y(n)=[y1(n),y2(n),…,yj(n)]T為J個次級聲源發出的次級聲信號;e(n)=[e1(n),e2(n),…,ek(n)]T為K個殘余誤差傳聲器信號;G(z)為J×K個次級通道的傳遞函數,可以用長度為M的FIR 濾波器表示;為對應的次級通道的估計。參考信號x(n)經過濾波后為濾波參考信號x′(n);y(n)經過真實的次級通道G(z)濾波后到達誤差傳聲器處與噪聲期望信號相消。
由I個參考信號生成J個次級聲源需要I×J個FIR濾波器,則第n時刻的第I階的濾波器參數為

次級聲源發出的信號是由I個參考信號經過I×J個濾波器的貢獻之和,若取濾波器長度為L,有

殘余誤差信號為噪聲期望信號與在誤差傳聲器處接收到的J個次級揚聲器發出的次級聲源之和:
若次級通道是時不變的,將上式重新整理可得

式中濾波參考信號為

2.2 FxLMS算法
控制目標一般取為誤差傳聲器處聲壓幅值2 階矩最小,即目標函數為

式中E表示期望。為避免在求取濾波器權矢量最優解時進行矩陣的求逆運算,一般使用LMS 算法更新自適應濾波器,則第i個參考傳感器到第j個控制器的濾波器權系數迭代公式為

上述便是多通道FxLMS 算法,該方法在面對非穩態噪聲的情況下降噪效果有限,甚至會導致系統收斂發散。在實際的工程應用中,面對1.1 節的沖擊工況路面時,在路噪主動控制系統中使用多通道FxLMS 算法會導致系統收斂失敗,嚴重時系統會發出尖銳刺耳的噪聲。
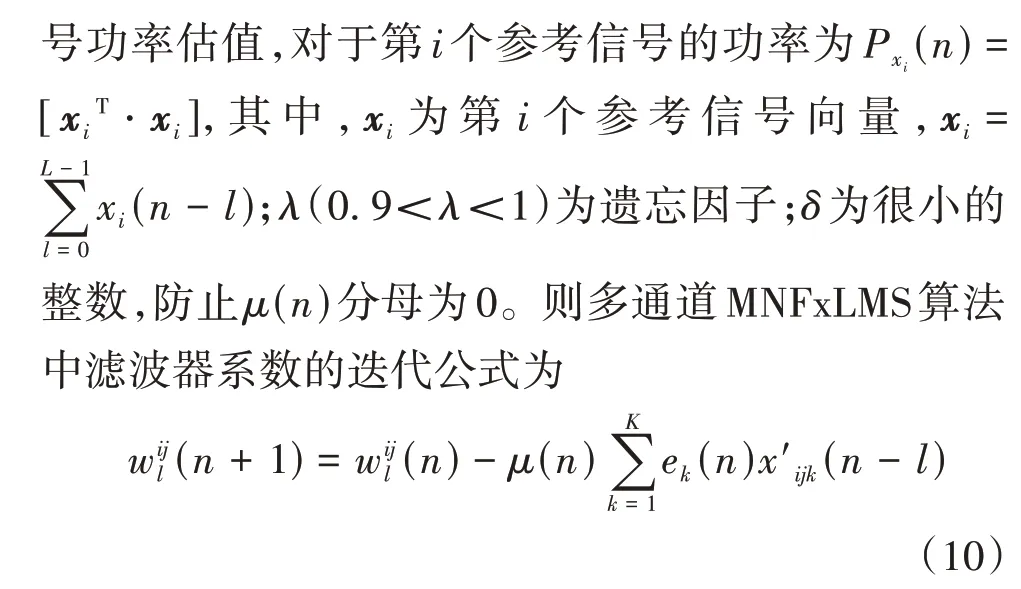
2.3 改進歸一化MNFxLMS算法
為改善FxLMS 算法因為固定步長帶來的魯棒性較差等問題。Akhtar 等提出了改進歸一化FxLMS(modified normalized FxLMS,MNFxLMS)算 法[15]。MNFxLMS 算法是為了使得步長因子獨立于輸入功率,使用歸一化的收斂系數實現自適應過程中收斂系數與穩態誤差之間的均衡,加強系統對于非穩定聲源的魯棒性。MNFxLMS算法步長因子變化為
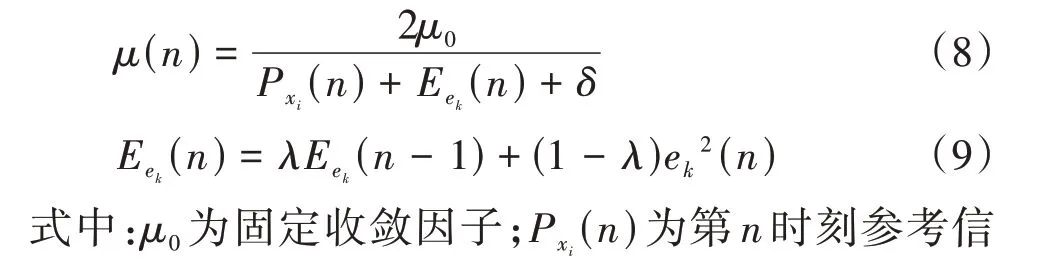
對于MNFxLMS算法,當參考信號或誤差信號的幅值較大時,等效步長就會變小,因此可以有效避免權值更新過程中出現發散的情況。該算法在計算機仿真中對于非穩態噪聲的控制能起到良好的效果,但其權值更新過程中每一次迭代均需要計算當前時刻的參考信號和誤差信號的功率,計算量大,對硬件算力要求較高,因此很少在實際工程應用。
2.4 濾波-x最小平均絕對偏差算法
1.2 節說明了路面沖擊輸入下的車內噪聲更適合用α穩定分布來描述其過程,對這類噪聲信號而言,基于非高斯的α穩定分布模型的噪聲信號處理算法,比基于高斯模型的算法具有更好的魯棒性和穩態性能。Leahy 基于α穩定分布的特征,提出了最小化殘差p階矩的濾波-x 最小平均p范數(filterd-x least meanp-norm,FxLMP)算法[16]。其實質就是使控制目標函數由誤差傳聲器處聲壓幅值2 階矩最小化變為p階矩最小化。即目標函數為

式中p<a為分數低階矩。則對應的濾波器權系數的迭代公式為

FxLMP算法對于包含脈沖性信號的沖擊噪聲可以獲得良好的降噪效果,但需要特征參數α的先驗信息。對于實際車輛行駛道路來說,路況是實時變化的,因此車內路噪信號的α是時變的。為了保證算法的穩定性,Bergamasco 提出了采用滑動窗實時在線估計α大小的改進FxLMP算法[17]。該算法雖然可以適應α的時變性,但每次權值迭代都需要計算誤差信號的p階矩,這將會大幅增加計算量。受到實際工程應用中硬件方面算力的限制必須降低該算法的計算量,Bergamasco 對于特征指數1 ≤α≤2 的樣本,令FxLMP算法中的p=1,則該算法變為濾波-x最小平均絕對偏差(FxLMAD)算法[18]。其中濾波器系數的迭代公式為

不難看出,FxLMAD 算法是FxLMP 算法的一種特殊情況,由于p≤α的條件總能滿足,FxLMAD 算法不需要對特征指數的先驗需求,同時極大地降低了計算量。FxLMAD 算法的本質是對e(n)中大幅值的樣本點進行限幅,避免由于大幅值的尖峰脈沖使權值在更新過程中發散。
2.5 算法復雜度分析
復雜度是評價算法性能的一個重要指標[11]。在工程實際應用中,一些復雜的算法往往因為硬件算力不夠而無法實際應用。本節對上文提到的FxLMS算法、MNFxLMS 算法和FxLMAD 算法的復雜度以單個周期為例子進行對比分析,取L表示濾波器長度,M表示次級通道長度,結果如表2 所示。在實際應用中,噪聲主動控制算法的實現通常是基于高性能數字信號處理(DSP)芯片的控制器。本節以亞德諾半導體(ADI)公司的ADI21565 芯片為載體,直觀地比較了上述AINC 算法的計算復雜度。DI21565 芯片的單指令周期為1.00 ns,計算中涉及的變量均采用32位浮點型,常用運算所需的指令數如表3所示。不難看出,除法運算的計算量遠遠高于乘法運算。此外,指數和對數運算需要大量的計算資源。

表2 計算復雜度比較

表3 常見操作的指令數
與下文相同,濾波器長度L和次級通道長度M均取為128,根據表2 與表3 中的數據計算出FxLMS算法、MNFxLMS 算法和FxLMAD 算法在單個周期內的指令數分別為5 115、6 485 和5 142。以FxLMS 算法指令數為基準,MNFxLMS 算法與FxLMAD 算法的指令數分別增加26.8%和0.5%,后者增加的計算量極低。
3 車內路噪主動控制仿真
為驗證不同算法對包含脈沖信號路噪的有效性,在MATLAB/Simulink 中建立多通道路噪主動控制模型,該模型中的參考信號數量為8,次級聲源與誤差傳聲器數量均為2,以前文1.1節所分析的車內噪聲數據作為輸入進行仿真。
3.1 次級路徑獲取
為了使仿真結果更可靠,選取實際車內測得的次級路徑作為模型中的次級路徑估計。在駕駛員位置的左右耳位置分別布置一個聚聲泰A2B數字傳聲器(GM26-V063)作為誤差傳聲器,座椅上的頭枕揚聲器作為次級聲源,布置形式如圖7 所示。控制每個次級聲源依次發出50~500 Hz 的掃頻噪聲,誤差傳聲器同時進行采集,使用LMS 算法離線獲得次級路徑的估計值。

圖7 次級聲源與誤差傳聲器布置
實車次級通道的濾波器系數如圖8 所示,每幅子圖包含了該位置揚聲器到2 個誤差傳聲器處的2個濾波器系數。次級路徑的濾波器階數選取為128階。

圖8 揚聲器到2個誤差傳聲器的濾波器系數
3.2 仿真結果分析
將仿真數據和辨識得到的次級路徑通道導入到Simulink 中,采樣頻率設置為2 kHz,3 種算法的仿真結果對比如表4所示。

表4 仿真結果
在60 km/h 的勻速下,MNFxLMS 算法和FxLMAD 算法降噪量差別不大但均遠好于傳統的FxLMS 算法。圖9 為60 km/h 各位置的頻譜分析結果,可以看到,MNFxLMS算法和FxLMAD 算法在50~500 Hz 均能取得有效的降噪效果,尤其是在低頻50~200 Hz取得的降噪效果更為明顯,說明了這兩種算法在控制包含脈沖性噪聲時的有效性。考慮到FxLMAD 算法的計算量更低,因此有更好的實際應用價值。

圖9 60 km/h仿真結果
4 實車試驗
4.1 試驗概況
為驗證所提方法的可行性,在某款燃油SUV 乘用車上進行車內路噪主動控制系統實車道路測試。采用與仿真相同的次級聲源、誤差傳聲器和相同數量的參考信號。系統的8 路參考信號來自于底盤與懸架處的共4個PCB 356A32型加速度計。這4個加速度計安裝位置的選取方法使用多重相干法為基礎[19],通過枚舉法列出基于12 個初選點的所有參考信號組合,最后選擇車內噪聲多重相干系數最大的參考信號組合作為終選結果,其實車安裝位置如圖10所示。

圖10 加速度傳感器布置
多通道路噪主動控制系統的硬件原理框架圖如圖11 所示,誤差信號到達A2B 傳聲器后,與汽車底盤處加速度計所獲取的振動信號共同通過由主收發器AD2428 和從收發器AD2426 構成的A2B 鏈路上傳至DSP,當DSP 中的存儲器數據到達設定長度時,運行多通道FxLMAD 算法,算法生成的次級聲信號再經過數模轉換和功放后驅動揚聲器發聲。

圖11 硬件原理框圖
在A2B誤差傳聲器旁放置一個MPA 416型監測傳聲器,用以采集降噪效果,采樣頻率為51.2 kHz數采設備為NI DAQmx。底盤加速度計與A2B 誤差傳聲器采樣頻率均為48 kHz,為提高計算效率在進入硬件系統后均降采樣為2 kHz。整個硬件系統主要由一塊集成了數字功放和MCU、A2B 主收發器、DSP 芯片的PCB 開發板構成。其中芯片型號為ADI公司的ADSP-21565、MCU 型號為恩智浦FS32K144 HAT0MLHT、A2B主、從收發器型號為AD2428和AD2426。其余設備還包括供電電源、線束等。試驗車輛和DSP控制器如圖12所示。

圖12 車內路噪主動控制平臺
4.2 試驗結果分析
試驗路面選擇為粗糙瀝青路面中某段包含沖擊的路段,測試時速度分別為50、60、70 和80 km/h 勻速行駛。試驗開始時提前打開噪聲主動控制系統,等待5 s系統收斂后開始數據采集;系統關閉時則直接采集數據。數據采集時長均為10 s,對比噪聲主動控制系統開啟和關閉后相應的噪聲信號。為提高測試結果的可信度,對不同車速下不同算法控制系統未開啟狀態下的車內噪聲進行對比。以80 km/h車速為例,其頻譜對比圖如圖13所示。

圖13 80 km/h系統關閉時噪聲對比
從圖中可以看出,在同一車速下,兩種系統關閉時的噪聲功率相差不大,在50~500 Hz 范圍內,將系統關閉時(FxLMAD)車內噪聲的總聲壓級(A 計權)減去系統關閉時(FxLMS)車內噪聲的總聲壓級(A計權),得到兩種算法在系統關閉時前者較后者在右耳處增量為0.4 dB,左耳處為-0.4 dB。4 種車速下兩種系統關閉時的車內噪聲聲壓級差值均在1 dB以內。實車道路測試結果如表5 所示,同仿真結果類似,FxLMAD 算法的降噪效果優于傳統的FxLMS算法。

表5 試驗結果
以80 km/h 降噪效果為例,此時左右耳在50~500 Hz 頻帶內的總聲壓級分別下降了2.2 和2.0 dB(A),而傳統的FxLMS 算法中,左右耳在50~500 Hz頻帶內的總聲壓級的降噪量為-0.6和0.2 dB(A)。
圖14 和圖15 為80 km/h 道路測 試頻譜和1/3 倍頻程對比結果。可以看出,傳統算法在200 Hz 以下的低頻部分控制早已失效,甚至產生了負向的降噪效果,而這一頻段對應的正好是整個路面中含有脈沖性的部分,傳統的FxLMS 算法對沖擊工況路面依然失效。在80~200 Hz內,FxLMAD 算法相較FxLMS算法有更好的噪聲控制效果,80 Hz以下的頻帶沒有得到有效的控制,其原因可能是被試驗中所使用的揚聲器頻響限制。
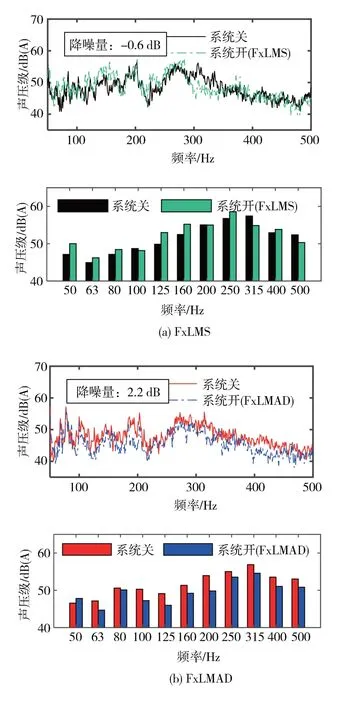
圖14 80 km/h道路測試結果(駕駛員座位左耳)
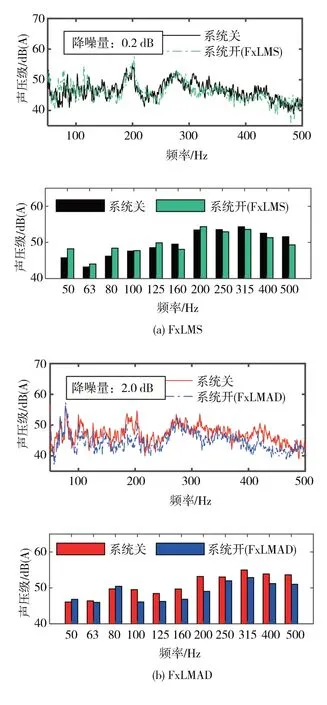
圖15 80 km/h道路測試結果(駕駛員座位右耳)
試驗結果表明,車輛在不同車速下,使用FxLMAD 算法的降噪系統在50~500 Hz 范圍內的總聲壓級降噪量均可以達到約2 dB(A),綜上所述,FxLMAD 算法在具有沖擊性信號的噪聲下相較于傳統的FxLMS 算法有良好的穩定性,從而使整個工況取得了更好的降噪效果,驗證了FxLMAD 算法在包含沖擊性信號的路面噪聲主動控制中的有效性。
5 結論
(1)通過對路面沖擊輸入下的車內噪聲特性分析,表明傳統FxLMS 算法不適用于處理此類工況,分析了適合沖擊路況的MNFxLMS 算法和FxLMAD算法,表明該兩種算法的計算復雜度在單個周期內對比傳統FxLMS算法分別增加了26.8%和0.5%。
(2)建立了不同算法的多通道路噪主動控制模型。在路面沖擊輸入下對車內噪聲主動控制系統進行仿真分析,結果表明,較傳統FxLMS 算法與MNFxLMS 算法,FxLMAD 算法不僅具有更好的降噪效果和穩定性,而且其結構相對簡單,計算量小,更具實際工程應用價值。
(3)基于DSP 構建了某燃油車路面沖擊輸入下車內噪聲主動控制試驗系統。驗證了基于FxLMAD算法的車內噪聲主動控制系統在控制沖擊性噪聲的實用性和有效性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
