基于蜜獾算法的破片序列圖像多閾值分割
2023-02-13 09:13:56牛天利于麗霞武錦輝牛雅昕
測(cè)控技術(shù) 2023年1期
關(guān)鍵詞:方法
牛天利, 于麗霞,劉 吉,,武錦輝,牛雅昕
(1.中北大學(xué) 信息與通信工程學(xué)院,山西 太原 030051;2.中北大學(xué) 電子測(cè)試技術(shù)重點(diǎn)實(shí)驗(yàn)室,山西 太原 030051)
破片圖像處理是靜爆場(chǎng)破片參數(shù)測(cè)量的重要步驟之一,靜爆之后的破片在運(yùn)動(dòng)過(guò)程中具有目標(biāo)小、數(shù)量多和尺寸不一等特點(diǎn),且在圖像中還存在復(fù)雜的強(qiáng)火光背景和炸藥未燃燒殆盡導(dǎo)致的運(yùn)動(dòng)破片灰度值相差較大等問(wèn)題[1]。因此,在圖像處理的過(guò)程中,將有效破片的運(yùn)動(dòng)區(qū)域和復(fù)雜的背景區(qū)域進(jìn)行較高精度的劃分有著重要的意義,圖像分割是將其進(jìn)行分離的重要步驟之一,分割的精度將直接影響到后期破片的檢測(cè)和識(shí)別準(zhǔn)確度。常用于圖像分割破片目標(biāo)的方法主要是基于一維灰度直方圖的閾值門(mén)限法和改進(jìn)的最大類間方差的方法等,但是這些方法更適用于具有單一目標(biāo)、前景和背景灰度分布差別較大的破片圖像中,而其余傳統(tǒng)的圖像分割方法,包括基于區(qū)域、圖論、超像素和活動(dòng)輪廓模型的方法,在實(shí)現(xiàn)過(guò)程中都存在時(shí)間復(fù)雜度較高的問(wèn)題,實(shí)時(shí)性較差[2-4]。自卷積神經(jīng)網(wǎng)絡(luò)發(fā)展以來(lái),基于深度學(xué)習(xí)的小目標(biāo)分割也應(yīng)運(yùn)而生,但是基于深度學(xué)習(xí)的方法需要大量的數(shù)據(jù)集,并且在復(fù)雜的背景下算法的魯棒性較差[5-7]。考慮到破片圖像成像環(huán)境的復(fù)雜性和圖像分割結(jié)果的特定應(yīng)用場(chǎng)合,目前還沒(méi)有普適的分割技術(shù)能夠應(yīng)用在處理這類圖像中[8-9]。本文利用破片序列圖像之間的相關(guān)性,采用幀差的方法對(duì)圖像進(jìn)行預(yù)處理后初步消除其背景[10-11],采用蜜獾算法(Honey Badger Algorithm,HBA)優(yōu)化的Tsallis相對(duì)熵多閾值圖像分割算法對(duì)其進(jìn)行較為精確的閾值分割。
1 HBA
1.1 基本原理
HBA是求解優(yōu)化問(wèn)題的新型元啟發(fā)式算法之一。元啟發(fā)式算法是在現(xiàn)實(shí)問(wèn)題的復(fù)雜性和難度不斷增加的過(guò)程中,為了適應(yīng)不同的應(yīng)用場(chǎng)合而不斷發(fā)展的,具有靈活、無(wú)梯度機(jī)制、避免局部最優(yōu)和計(jì)算成本低等優(yōu)勢(shì)[12-13]。
HBA是基于蜜獾的覓食行為發(fā)展而來(lái)的一種求解優(yōu)化問(wèn)題的高效搜索策略,是一種全局優(yōu)化算法[14]。蜜獾的覓食行為可分為兩種,一種是通過(guò)自身嗅和挖來(lái)尋找食物;另一種是通過(guò)跟隨引導(dǎo)獾定位蜂巢。該算法將蜜獾的這兩種行為分別設(shè)定為挖掘模式和采蜜模式,在算法實(shí)現(xiàn)中主要用于更新個(gè)體位置。HBA與大多數(shù)算法相同,都由探索和開(kāi)發(fā)2個(gè)重要部分組成,探索將搜索范圍擴(kuò)展到搜索空間中較遠(yuǎn)的區(qū)域,開(kāi)發(fā)是在搜索到的有效區(qū)域進(jìn)行局部目標(biāo)搜索[15-16]。探索和開(kāi)發(fā)本質(zhì)上是兩種相互矛盾的功能,需要控制種群中的隨機(jī)性確保兩者功能的平衡[17-18]。HBA結(jié)構(gòu)大體分為種群初始化、種群評(píng)估和更新參數(shù)3部分,其包括3個(gè)主要控制參數(shù),分別為強(qiáng)度I、隨機(jī)控制因子α和改變搜索方向的標(biāo)志F。強(qiáng)度I用于調(diào)整由探索到開(kāi)發(fā)過(guò)程以及避免局部最優(yōu)。隨機(jī)控制因子α在迭代過(guò)程中隨時(shí)間衰減,減少種群的多樣性,保證探索和開(kāi)發(fā)階段的平衡。改變搜索方向的標(biāo)志F為給定的搜索空間的搜索提供種群的多樣性。
1.2 算法的基本步驟
HBA的實(shí)現(xiàn)步驟如下。

② 對(duì)種群大小和其位置進(jìn)行初始化,xi=lbi+r1×(ubi-lbi)。r1為0~1之間的隨機(jī)數(shù);lbi和ubi分別為搜索空間的上邊界和下邊界;l和u分別為自定義數(shù)值范圍的上界和下界;bi一般設(shè)為d維單位矩陣。

⑤ 跳出局部最優(yōu),使用標(biāo)志F改變搜索方向,使得搜索個(gè)體嚴(yán)格掃描搜索空間,在實(shí)現(xiàn)過(guò)程中與步驟⑥相結(jié)合。
⑥ 更新個(gè)體位置xnew,分為挖掘階段和采蜜階段。在挖掘階段,蜜獾的運(yùn)動(dòng)可用心臟線來(lái)表示,xnew=xprey+F×β×I×xprey+F×r3×α×di×|cos2πr4×[1-cos(2πr5)]|。xprey為目前全局最優(yōu)位置;β≥1,表示蜜獾獲取食物的能力,默認(rèn)值為6;di為獵物與第i只蜜獾之間的距離,r3、r4、r5為0~1之間3個(gè)不同的隨機(jī)數(shù);F為改變搜索方向的標(biāo)志,r6≤0.5 h時(shí),F(xiàn)=1,其余時(shí)候F=-1;采蜜階段是蜜獾根據(jù)蜂蜜向?qū)ふ曳涿鄣那闆r,模擬為xnew=xprey+F×r7×α×di,在這個(gè)過(guò)程中蜜獾在獵物xprey附近搜索,搜索過(guò)程受密度因子α的影響。
2 Tsallis相對(duì)熵多閾值圖像分割原理
Tsallis相對(duì)熵是在Tsallis熵和Kullback-Leibler散度的基礎(chǔ)上提出的[19],設(shè)兩個(gè)離散有限概率向量A和B分別為A={a1,a2,…,an}和B={b1,b2,…,bn},其中ai,bi≥0且a1+a2+…+an=b1+b2+…+bn=1,則Tsallis相對(duì)熵測(cè)度為
(1)

(2)
一維分布直方圖情況下Tsallis相對(duì)熵的灰度級(jí)i對(duì)應(yīng)的關(guān)于A1~AN+1的類概率為
(3)
式中:i=1,2,…,L;j=1,2,…,L;μj為分割后某一灰度級(jí)的類均值;σj為分割后某一灰度級(jí)的類方差。將分割后圖像的灰度級(jí)用高斯模型進(jìn)行擬合后表示為
(4)
式中:ri為對(duì)分割后圖像高斯擬合后灰度級(jí)i在圖像中出現(xiàn)的頻率。將H和R對(duì)應(yīng)的概率分布帶入式(1)可得:
(5)
將式(5)作為圖像多閾值分割的準(zhǔn)則,由式(5)可知圖像分割的最優(yōu)閾值就是利用蜜獾算法取得式(5)最小值時(shí)對(duì)應(yīng)的灰度值,則最佳分割閾值T由式(6)求得,使D(H|R)達(dá)到最小值時(shí)的灰度值的集合為
(6)
3 圖像分割實(shí)驗(yàn)與分析
為了驗(yàn)證本文算法處理破片圖像的精確性和有效性,需要將該方法與經(jīng)典的閾值分割方法,例如Otsu法、最大熵法、最小交叉熵法對(duì)高速相機(jī)遠(yuǎn)距離拍攝的破片序列圖像進(jìn)行對(duì)比實(shí)驗(yàn),對(duì)比其分割效果,之后利用遺傳算法(Genetic Algorithm,GA)、蝗蟲(chóng)優(yōu)化算法(Grasshopper Optimization Algorithm,GOA)和麻雀搜索算法(Sparrow Search Algorithm,SSA)與HBA進(jìn)行Tsallis相對(duì)熵多閾值分割,驗(yàn)證HBA算法的優(yōu)越性,其中任意選取的序列中的兩幀圖像如圖1所示,在進(jìn)行分割前需要對(duì)圖像進(jìn)行幀差反色預(yù)處理,幀差的目的在于將破片目標(biāo)和運(yùn)動(dòng)背景進(jìn)行粗略地分離。高速破片和復(fù)雜背景以不同的速度運(yùn)動(dòng)且利用高速相機(jī)在拍攝時(shí)幀率高、可拍攝到破片場(chǎng)局部變化等特點(diǎn),選取兩幅合適的間隔幀圖像將相對(duì)應(yīng)的灰度值相減,其復(fù)雜背景的運(yùn)動(dòng)速度比破片的運(yùn)動(dòng)速度小,幀差之后運(yùn)動(dòng)破片所在的區(qū)域與背景的差值會(huì)表現(xiàn)出較高的像素值,像素值越高,其運(yùn)動(dòng)趨勢(shì)越明顯,該像素位置的目標(biāo)運(yùn)動(dòng)速度越快,而原背景運(yùn)動(dòng)速度較慢,幀差之后表現(xiàn)出較低的像素值。為了便于觀察,對(duì)其進(jìn)行反色處理,其結(jié)果由灰度值255減去當(dāng)前值得到,反色后像素值越接近于0的部分表示該區(qū)域的破片運(yùn)動(dòng)速度越快,預(yù)處理結(jié)果圖如圖2所示。實(shí)驗(yàn)在MATLAB2018a上展開(kāi),Tsallis相對(duì)熵參數(shù)q設(shè)定為0.8。

圖1 原始圖像

圖2 預(yù)處理結(jié)果圖
3.1 經(jīng)典閾值分割法實(shí)驗(yàn)分析
利用上述的3種經(jīng)典的閾值分割方法對(duì)預(yù)處理過(guò)的破片圖像進(jìn)行雙閾值的分割,得到分割結(jié)果如圖3所示。
在圖像中灰度值越接近于0的部分表示其在實(shí)際運(yùn)動(dòng)中的速度越快,該部分是破片所在的像素點(diǎn)的可能性越大,因此分割出預(yù)處理后的圖像中像素值最接近于0的部分至關(guān)重要。為了便于觀察用JET映射的偽彩圖對(duì)不同的灰度分布進(jìn)行標(biāo)記區(qū)分,其中藍(lán)色部分表示分割后灰度值為0的部分,由圖3可知,該方法能夠?qū)D像中破片所在的位置粗略分割,但是對(duì)于圖像中左下角區(qū)域中較難分割的區(qū)域分割效果較差,為了清晰地觀察到該區(qū)域的灰度分布,利用HBA的Tsallis相對(duì)熵多閾值圖像分割對(duì)破片圖像進(jìn)行實(shí)驗(yàn)和分析。

圖3 3種經(jīng)典閾值分割結(jié)果圖
3.2 HBA破片圖像閾值分割實(shí)驗(yàn)與分析
3.2.1 閾值個(gè)數(shù)的選取
利用HBA對(duì)圖2進(jìn)行閾值分割,圖像的灰度級(jí)為256,算法迭代次數(shù)為200,種群大小為40,分別選取閾值個(gè)數(shù)K=2、3、4,得到分割結(jié)果如圖4所示。藍(lán)色部分依然表示的是分割后灰度值為0的部分。分割結(jié)果表明,當(dāng)K分別為2、3和4時(shí),在左下角的局部區(qū)域總能觀察到閾值分割后所需要的前景目標(biāo)是不變的,K=2時(shí)的分割結(jié)果已經(jīng)能明顯看出所在目標(biāo),因此,后續(xù)對(duì)比分析的閾值個(gè)數(shù)K均取值為2。

圖4 基于HBA的多閾值分割圖
3.2.2 GA、GOA、SSA與本文算法對(duì)比分析
在對(duì)破片圖像的閾值分割過(guò)程中,為了比較HBA在閾值分割應(yīng)用中的優(yōu)越性,選取K=2,采用其余算法進(jìn)行對(duì)比,其中GA、GOA和SSA分別代表遺傳、蝗蟲(chóng)和麻雀搜索算法[23-25],將其分別用于對(duì)破片圖像進(jìn)行Tsallis相對(duì)熵多閾值分割,選取每種算法迭代次數(shù)為200,種群大小為40,則得到GA、GOA和SSA的分割效果如圖5所示。由圖5可以看出,HBA的雙閾值分割結(jié)果明顯優(yōu)于GA、GOA和SSA。

圖5 GA、GOA和SSA雙閾值分割圖
為了對(duì)分割結(jié)果和算法性能進(jìn)行客觀描述,從閾值、熵值、實(shí)時(shí)性,以及算法的穩(wěn)定性進(jìn)行分析。根據(jù)Tsallis相對(duì)熵函數(shù)的式(3)可知,熵值越小,分割后的圖像保留的信息越多。HBA收斂后得到的最小熵值即為最優(yōu)熵值,求得最優(yōu)熵值的閾值為最優(yōu)閾值。算法的實(shí)時(shí)性也是檢測(cè)該算法性能的重要性能指標(biāo)之一,主要通過(guò)算法的運(yùn)行時(shí)間來(lái)對(duì)比,運(yùn)行所須的時(shí)間越短,其實(shí)時(shí)性越高[26]。算法的穩(wěn)定性通常用算法多次計(jì)算結(jié)果的標(biāo)準(zhǔn)偏差(SD)衡量[27],其公式為
(7)
式中:σi為第i次實(shí)驗(yàn)結(jié)束的Tsallis相對(duì)熵值;n為實(shí)驗(yàn)重復(fù)次數(shù);μ為n次實(shí)驗(yàn)結(jié)果的均值,進(jìn)行100次多閾值重復(fù)分割實(shí)驗(yàn),驗(yàn)證算法的穩(wěn)定性,標(biāo)準(zhǔn)偏差值越小,其算法的穩(wěn)定性越高,4種方法的性能對(duì)比如表1所示。從表1可以看出,利用HBA進(jìn)行圖像分割后所得的閾值為5.14和254.17,5.14最接近0,可以更精確地分割出圖像中灰度值接近0的像素點(diǎn),將其作為單閾值分割的最終閾值;最優(yōu)熵值3.56最小,相比于其他算法,HBA可以保留更多的信息;運(yùn)行時(shí)間最短,在100次重復(fù)實(shí)驗(yàn)后求得標(biāo)準(zhǔn)偏差SD約為0,說(shuō)明基于HBA的多閾值分割方法不但能有效分割出所須的前景目標(biāo),而且其實(shí)時(shí)性和算法的穩(wěn)定性也最強(qiáng)。

表1 4種方法的性能對(duì)比
4 圖像分割結(jié)果驗(yàn)證
為了驗(yàn)證本文算法的有效性,首先,對(duì)高速相機(jī)拍攝到的破片序列圖像進(jìn)行幀差預(yù)處理,取幀間隔數(shù)為50;其次,利用本文算法對(duì)預(yù)處理過(guò)后的圖像進(jìn)行雙閾值分割,選取雙閾值中最小的閾值作為最終的分割閾值對(duì)圖像進(jìn)行分割處理,將分割出的目標(biāo)作為破片識(shí)別的結(jié)果,并對(duì)其進(jìn)行標(biāo)記。由于破片目標(biāo)較小,且形狀不規(guī)則,因此,以破片目標(biāo)的質(zhì)心描述破片的全部信息。破片識(shí)別及質(zhì)心標(biāo)記結(jié)果如圖6所示。
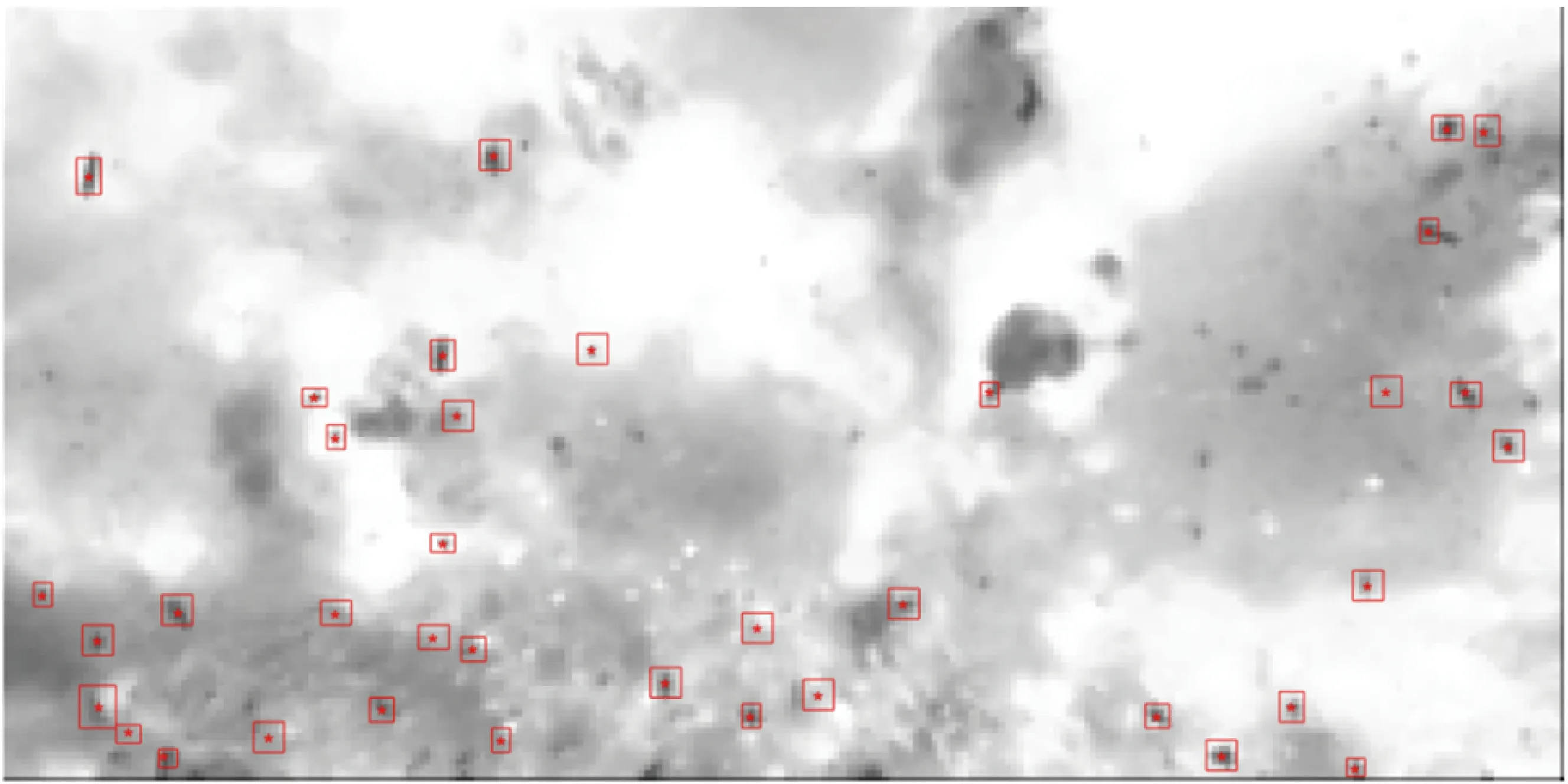
圖6 破片識(shí)別及質(zhì)心標(biāo)記結(jié)果
根據(jù)高速破片運(yùn)動(dòng)軌跡的連續(xù)性和方向性,在已有的325幅序列圖像中,分別對(duì)第1、51、101、151、201、251、301幀圖像進(jìn)行處理,檢測(cè)到的破片個(gè)數(shù)如表2所示。

表2 檢測(cè)到的破片個(gè)數(shù)
對(duì)多幀間識(shí)別到的破片目標(biāo)進(jìn)行軌跡擬合,每條軌跡的坐標(biāo)數(shù)大于4為有效軌跡,根據(jù)軌跡的條數(shù)確定有效破片的數(shù)量,有效破片軌跡圖如圖7所示。

圖7 有效破片軌跡圖
圖7中有26條連續(xù)的軌跡,即在所有識(shí)別到的破片中最終測(cè)得26個(gè)有效的破片。從表2中可以看出,每幀可識(shí)別到的破片平均約為31個(gè),其識(shí)別率為
(8)

5 結(jié)束語(yǔ)
對(duì)破片圖像的多閾值分割方法進(jìn)行了研究,提出了基于HBA的Tsallis相對(duì)熵的多閾值分割方法,與經(jīng)典的閾值分割方法相比,所提方法可以較準(zhǔn)確地分割出圖像中灰度值接近于0的部分,并通過(guò)對(duì)比GA、GOA、SSA的閾值、熵值、實(shí)時(shí)性和算法的穩(wěn)定性等性能指標(biāo),說(shuō)明HBA的性能優(yōu)于其余3種算法。最后,根據(jù)分割出的目標(biāo)繪制破片軌跡,確定有效破片的數(shù)量,結(jié)果表明,識(shí)別到的有效破片占總識(shí)別到的破片的83.8%,說(shuō)明利用該閾值分割方法識(shí)別破片對(duì)視覺(jué)測(cè)試系統(tǒng)測(cè)量破片參數(shù)具有參考價(jià)值。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫(huà)報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
