工業(yè)相機(jī)過曝光自適應(yīng)優(yōu)化控制算法
2023-02-14 12:22:06吳文麟廖曉波李俊忠周軍莊健
光學(xué)精密工程 2023年2期
關(guān)鍵詞:區(qū)域實(shí)驗(yàn)
吳文麟,廖曉波,*,李俊忠,周軍,莊健
(1.西南科技大學(xué) 制造學(xué)院,制造過程測(cè)試技術(shù)教育部重點(diǎn)實(shí)驗(yàn)室,四川 綿陽(yáng) 621010;2.西安交通大學(xué) 機(jī)械工程學(xué)院,陜西 西安 710049)
1 引言
隨著制造業(yè)的不斷發(fā)展,工業(yè)視覺系統(tǒng)的應(yīng)用越來越廣泛。例如,在高精密激光加工時(shí)常需要對(duì)加工工件進(jìn)行動(dòng)態(tài)的觀測(cè),以便更好地調(diào)整加工參數(shù)和確定工件加工質(zhì)量[1]。但類如激光加工等工業(yè)場(chǎng)景具有亮度高且突變性強(qiáng)的特點(diǎn),工業(yè)相機(jī)往往無法在這種環(huán)境中清晰成像,獲得較好的觀測(cè)數(shù)據(jù)。目前在工業(yè)環(huán)境中工業(yè)相機(jī)常用的曝光方法分為基于硬件的自動(dòng)曝光方法和基于圖像的自適應(yīng)曝光算法。基于相機(jī)硬件的自動(dòng)曝光算法通過感光元件和硬件電路的配合設(shè)計(jì)在一定程度上可以解決成像問題[2],但是受限于調(diào)節(jié)所涉硬件的調(diào)節(jié)范圍,環(huán)境亮度一旦超過調(diào)節(jié)范圍即失去調(diào)節(jié)能力,無法完全適應(yīng)高亮突變環(huán)境。基于圖像的自適應(yīng)曝光算法主要包括全局和局部的亮度均值算法、直方圖算法、圖像信息熵算法和深度學(xué)習(xí)算法等[3]。李文濤等人[4]提出一種圖像直方圖與相機(jī)曝光時(shí)間相結(jié)合的方法進(jìn)行過度曝光自適應(yīng)調(diào)節(jié),但其對(duì)全圖進(jìn)行直方圖估計(jì),運(yùn)算速度較慢,且線性調(diào)節(jié)方式具有較大的局限性。汪錦航等人[5]通過坐標(biāo)映射關(guān)系自適應(yīng)調(diào)整圖案亮度,從而解決亮度過大或亮度不足的問題,但是這種方法無法處理區(qū)域性亮度不足,適應(yīng)性較低。Kataoka 等人[6]利用最大化全圖熵的方法確定曝光時(shí)間,對(duì)圖像中明暗較為突出的區(qū)域采用分塊的方法估計(jì)區(qū)域圖像熵,從而抑制高光溢出和陰影遮擋的影響。這種方法雖然針對(duì)全圖進(jìn)行模塊化自適應(yīng),但是圖像熵的計(jì)算量較大,分塊計(jì)算后的調(diào)節(jié)時(shí)間較慢。Que 等人[7]提出一種多重曝光融合方法,將全局和局部亮度分量通過權(quán)重聯(lián)合起來,同時(shí)利用一種多尺度邊緣保持平滑模型對(duì)多重曝光的圖像進(jìn)行融合擬合,實(shí)現(xiàn)了較大范圍的自適應(yīng)曝光。但是這種方法存在擬合誤差,且成像需多幅圖像,有效目標(biāo)成像速度較慢。
針對(duì)上述問題,本文提出了一種改進(jìn)的工業(yè)相機(jī)曝光自適應(yīng)控制方法。算法實(shí)時(shí)計(jì)算預(yù)設(shè)區(qū)域的平均加權(quán)灰度值,通過反饋調(diào)節(jié)方法計(jì)算曝光值,并將其作為當(dāng)前曝光值控制相機(jī)曝光時(shí)長(zhǎng),同時(shí)利用基于改進(jìn)“S”曲線的參數(shù)控制優(yōu)化方法,對(duì)反饋調(diào)節(jié)方法內(nèi)部參數(shù)進(jìn)行優(yōu)化控制,由上過程不斷迭代直至達(dá)到預(yù)設(shè)的理想清晰化曝光水平。
2 區(qū)域加權(quán)平均灰度值計(jì)算方法
傳統(tǒng)圖像的環(huán)境亮度采集和評(píng)估指標(biāo)有平均灰度和圖像亮度直方圖等方法[8]。考慮到圖像亮度直方圖需要對(duì)全圖亮度進(jìn)行統(tǒng)計(jì)并全排列,涉及到的變量較多,計(jì)算量較大,計(jì)算速度較慢[9]。本文從時(shí)效性出發(fā),選擇了使用平均灰度作為采集和環(huán)境亮度評(píng)價(jià)指標(biāo),設(shè)計(jì)了一種區(qū)域平均灰度加權(quán)算法。
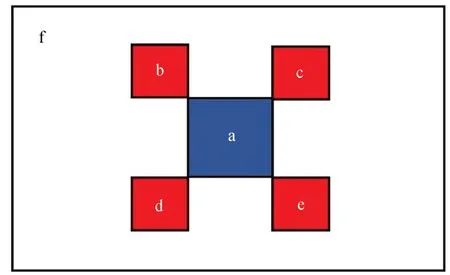
圖1 區(qū)域劃分示意圖Fig.1 Area division
由相機(jī)成像的特征可知,高亮目標(biāo)往往在發(fā)光中心區(qū)域的亮度最高,亮度跟隨距離依次衰減。結(jié)合工業(yè)相機(jī)中心對(duì)焦的特性,越靠近中心區(qū)域的像素值對(duì)整體算法的計(jì)算影響越大。因此本文算法將整體圖像劃分為6 個(gè)區(qū)域,即主級(jí)區(qū)域(圖1 中藍(lán)色區(qū)域a)、4 個(gè)次級(jí)區(qū)域(圖1 中紅色區(qū)域b,c,d,e)和其他區(qū)域(圖1 中白色區(qū)域f)。算法進(jìn)行計(jì)算時(shí)只選擇主級(jí)區(qū)域a 和次級(jí)區(qū)域b,c,d,e 進(jìn)行灰度計(jì)算,其他區(qū)域不參與計(jì)算,由此設(shè)計(jì)可拋棄無效運(yùn)算,提高計(jì)算速度(彩圖見期刊電子版)。
根據(jù)計(jì)算區(qū)域設(shè)置方式,圖像的平均區(qū)域灰度加權(quán)值見式(1):

其中:pz為圖像區(qū)域平均灰度加權(quán)值;Pa為主級(jí)區(qū)域總灰度值;Pb,Pc,Pd,Pe為次級(jí)區(qū)域總灰度值;Sa,Sb為主級(jí)區(qū)域和次級(jí)區(qū)域像素面積;μ1為主級(jí)區(qū)域的權(quán)重值;μ2為次級(jí)區(qū)域的權(quán)重值。
為了更好地突出中心區(qū)域在計(jì)算中的權(quán)重,結(jié)合上述區(qū)域關(guān)系,設(shè)計(jì)權(quán)重μ1=0.6,μ2=0.1,設(shè)計(jì)中心區(qū)域邊長(zhǎng)與四周區(qū)域的邊長(zhǎng)比例4∶1,即Sa∶Sb=16∶1。
3 改進(jìn)“S”曲線的參數(shù)控制優(yōu)化方法
傳統(tǒng)的反饋控制調(diào)節(jié)方法因其整定簡(jiǎn)便,結(jié)構(gòu)靈活,在控制領(lǐng)域的應(yīng)用極為廣泛,其中較為突出的就是PID(Propotion Integration Differentiation)控制方法。其方法通過比例、積分、微分環(huán)節(jié)對(duì)目標(biāo)實(shí)現(xiàn)反饋控制,在參數(shù)不變的情況下可達(dá)到較高的調(diào)節(jié)精度[10]。但是在非線性且時(shí)變性較強(qiáng)的環(huán)境中,固定參數(shù)的PID 反饋調(diào)節(jié)方法存在一定的局限性[11]。針對(duì)可變環(huán)境,為了提高PID 控制算法的魯棒性,目前較為常用的為模糊PID 反饋調(diào)節(jié)算法,其利用專家經(jīng)驗(yàn)制定控制規(guī)則,通過模糊化的參數(shù)整定和解模糊算法對(duì)PID參數(shù)進(jìn)行控制[12]。但是受限于整定方式和模糊控制規(guī)則,時(shí)常出現(xiàn)“模糊規(guī)則爆炸”等情況[13]。本文提出一種基于區(qū)域化誤差閾值的自適應(yīng)反饋參數(shù)調(diào)節(jié)方法,通過誤差整定、調(diào)節(jié)系數(shù)計(jì)算和實(shí)時(shí)調(diào)節(jié)的方法對(duì)反饋調(diào)節(jié)中的PID 內(nèi)部參數(shù)進(jìn)行控制,極大地降低了超調(diào)出現(xiàn)的可能性,且適應(yīng)性較強(qiáng)。
本文提出的反饋參數(shù)調(diào)節(jié)方法的輸入?yún)?shù)為反饋調(diào)節(jié)的計(jì)算值與設(shè)定理論值的誤差E,通過如式(2)進(jìn)行歸一化運(yùn)算:
中國(guó)人民銀行南京分行營(yíng)業(yè)管理部課題組則完成了對(duì)金融支持PPP模式的路徑與投資策略的研究。該課題組首先總結(jié)了我國(guó)PPP項(xiàng)目的基本情況,在借鑒國(guó)際經(jīng)驗(yàn)的基礎(chǔ)上,以南京地區(qū)為例分析金融支持PPP模式的意愿、路徑及制約因素,采用凈現(xiàn)值法構(gòu)造了項(xiàng)目?jī)r(jià)值模型,對(duì)金融支持PPP模式的投資策略進(jìn)行了研究并提出政策建議[9]。
將誤差E帶入公式計(jì)算得到當(dāng)前反饋參數(shù)計(jì)算情況下的歸一化系數(shù)θ,如式(3)所示:

歸一化系數(shù)θ用于參數(shù)控制的區(qū)域化閾值評(píng)價(jià)體系,如圖2 所示。
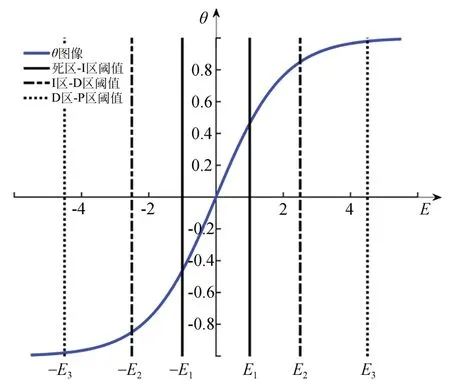
圖2 區(qū)域化閾值評(píng)價(jià)體系示意圖Fig.2 Regionalized threshold evaluation system
其中區(qū)域依據(jù)自主設(shè)定的E1,E2,E3劃分區(qū)域控制參數(shù)死區(qū)、I 調(diào)節(jié)區(qū)、D 調(diào)節(jié)區(qū)和P 調(diào)節(jié)區(qū)。控制參數(shù)死區(qū)范圍即參數(shù)優(yōu)化完成區(qū)域,P 區(qū)、D區(qū)、I 區(qū)分別為對(duì)應(yīng)反饋調(diào)節(jié)參數(shù)的調(diào)節(jié)區(qū)域。由于改進(jìn)后的“S”曲線在E=0 處的斜率最大,且在E=0 附近可近似看作線性函數(shù),考慮調(diào)節(jié)的速度和穩(wěn)定性,設(shè)定E3=2E2,E1為零點(diǎn)附近值,根據(jù)經(jīng)驗(yàn)設(shè)定E1∈[0.05,0.1]。當(dāng)計(jì)算誤差落入相應(yīng)區(qū)域時(shí),算法通過歸一化系數(shù)θ計(jì)算得到用于參數(shù)調(diào)節(jié)的參數(shù)控制系數(shù)φ,其計(jì)算公式如公式(4)所示:

若為P 區(qū)范圍,如式(5):

此時(shí)反饋調(diào)節(jié)中的參數(shù)D、參數(shù)I為0。
若為D 區(qū)范圍,如式(6)所示:

若為I 區(qū)范圍,則調(diào)整反饋調(diào)節(jié)中的參數(shù)I為e-15,其他參數(shù)不變。
計(jì)算得到的參數(shù)控制系數(shù)φ通過如公式(7)所示計(jì)算得到調(diào)整后的參數(shù)值。

計(jì)算后的參數(shù)作為下一次反饋調(diào)節(jié)參數(shù)參與調(diào)節(jié)。由上過程往復(fù)進(jìn)行,直至歸一化系數(shù)θ位于死區(qū)范圍,即認(rèn)定其參數(shù)自適應(yīng)完成,停止參數(shù)調(diào)整。
4 成像評(píng)價(jià)與實(shí)驗(yàn)測(cè)試
4.1 成像評(píng)價(jià)標(biāo)準(zhǔn)
目前常用的圖像質(zhì)量評(píng)價(jià)方法有最小可分辨率對(duì)比度、調(diào)制傳遞函數(shù)、對(duì)比度信噪比等方法[14]。為了更好地評(píng)價(jià)本文所述算法的性能與可行性,本文采用Laplacian 清晰度標(biāo)準(zhǔn)作為評(píng)價(jià)標(biāo)準(zhǔn)。本文選擇了Laplacian 梯度函數(shù)作為本文圖像評(píng)價(jià)算法的主要計(jì)算函數(shù)。Laplacian 梯度函數(shù)基于Laplacian 算子,計(jì)算X和Y方向上的梯度值,之后進(jìn)行累加計(jì)算,見式(8)和式(9):
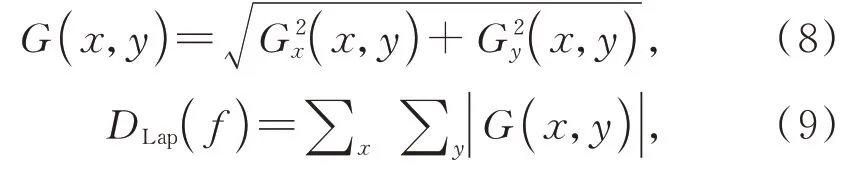
其中:DLap(f) 為圖像(x,y)點(diǎn)的Laplacian 值,G(x,y)為圖像X,Y方向梯度權(quán)值。
利用Laplacian 算子計(jì)算后得到原圖像的Laplacian 轉(zhuǎn)換圖像,此時(shí)圖像像素值即為經(jīng)過計(jì)算后的Laplacian 值。根據(jù)所得到的Laplacian 轉(zhuǎn)換圖像計(jì)算其標(biāo)準(zhǔn)差值,并利用該標(biāo)準(zhǔn)差值對(duì)曝光調(diào)節(jié)的質(zhì)量進(jìn)行評(píng)價(jià),標(biāo)準(zhǔn)差值越大進(jìn)而說明圖像像素值分布分散,圖像質(zhì)量越高。圖像的標(biāo)準(zhǔn)差即距離圖像均差平方的算術(shù)平均數(shù)的算術(shù)平方根,可以反映圖像像素值與圖像像素均值的離散程度,進(jìn)一步反映了圖像的成像質(zhì)量[15-17]。經(jīng)過Laplacian 轉(zhuǎn)換后的圖像梯度明顯,使用標(biāo)準(zhǔn)差可有效反映圖像的清晰程度和有效信息量,有利于對(duì)成像后的圖像質(zhì)量進(jìn)行評(píng)估。
4.2 實(shí)驗(yàn)平臺(tái)搭建
本文所述算法運(yùn)算平臺(tái)使用移動(dòng)版PC,處理器為Intel I8-8750H,顯卡為NVIDIA GeForce 1050,內(nèi)存為16 GB。圖像采樣設(shè)備使用海康工業(yè)相機(jī)MV-CA020-10UC 搭配海康威視MVLHF0804M-10MP 定焦鏡頭。海康工業(yè)相機(jī)MVCA020-10UC 為200 萬(wàn)像素的CMOS 工業(yè)面陣相機(jī),兼容USB3 Vision 協(xié)議。圖像采集對(duì)象為可調(diào)節(jié)100 W 白熾燈,并使用工業(yè)圖像采集臺(tái)(如圖3 所示)進(jìn)行相關(guān)實(shí)驗(yàn)。亮度測(cè)量設(shè)備采用希瑪AS803 亮度檢測(cè)儀。在軟件方面,本文所述算法基于C++開發(fā),使用海康工業(yè)相機(jī)SDK 進(jìn)行相機(jī)硬件調(diào)用與控制,使用OpenCV(版本4.5.1)開源視覺軟件庫(kù)進(jìn)行圖像處理。
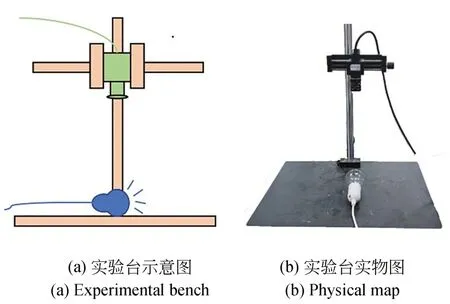
圖3 本文算法實(shí)驗(yàn)平臺(tái)示意圖Fig.3 Experimental platform for algorithms
4.3 實(shí)驗(yàn)測(cè)試數(shù)據(jù)
為驗(yàn)證算法有效性,本文以可調(diào)為對(duì)象使用實(shí)驗(yàn)平臺(tái)設(shè)計(jì)實(shí)驗(yàn),獲得實(shí)際環(huán)境中的曝光值控制曲線,并對(duì)其進(jìn)行分析。同時(shí),本文設(shè)置了對(duì)比實(shí)驗(yàn)。使用工業(yè)相機(jī)硬件自動(dòng)曝光算法、圖像直方圖法作為對(duì)比實(shí)驗(yàn)方法進(jìn)行實(shí)驗(yàn)。通過不同方法計(jì)算數(shù)值分別調(diào)節(jié)曝光值,計(jì)算每幀圖像的Laplacian 轉(zhuǎn)換圖像的標(biāo)準(zhǔn)差值,之后與本文所述算法進(jìn)行對(duì)比,得出結(jié)論。
4.3.1 基于本文算法的曝光控制實(shí)驗(yàn)
為了驗(yàn)證算法的曝光控制性能,本文設(shè)置了實(shí)際環(huán)境下的曝光控制實(shí)驗(yàn),以可調(diào)節(jié)亮度的白熾燈作為實(shí)驗(yàn)的高亮發(fā)光對(duì)象,并通過設(shè)定區(qū)域平均加權(quán)灰度值pz的上下閾值控制整體調(diào)節(jié)算法是否介入。針對(duì)圖像過曝,在實(shí)驗(yàn)設(shè)置的初始曝光為8 000,設(shè)定的pz上閾值為115 pix,下閾值為 25 pix,調(diào)節(jié)區(qū)劃分E1=0.1,E2=10,E3=20。在實(shí)驗(yàn)中白熾燈亮度逐漸增大,直至最高亮度,采集計(jì)算曝光值,獲得曝光控制響應(yīng)曲線,如圖4 所示。之后以相同的參數(shù)設(shè)定進(jìn)行5 次重復(fù)實(shí)驗(yàn),如表1 所示,其中調(diào)節(jié)時(shí)間為計(jì)算從開始進(jìn)入調(diào)節(jié)過程到進(jìn)入死區(qū)時(shí)的時(shí)間。
由圖4 可知,在初始階段,相機(jī)根據(jù)設(shè)定的初始曝光值8 000 進(jìn)行成像。隨著白熾燈亮度逐漸增大,超過了設(shè)定的區(qū)域加權(quán)灰度值的上閾值,算法開始介入并對(duì)相機(jī)曝光進(jìn)行控制,經(jīng)過0.08 s 后誤差落入死區(qū)中,曝光調(diào)節(jié)和參數(shù)調(diào)整停止并按照落入死區(qū)時(shí)的計(jì)算曝光值進(jìn)行成像。由上可知,算法控制效果較為明顯,超調(diào)量較小,并能以較快速度完成收斂過程。
經(jīng)過上述參數(shù)設(shè)定進(jìn)行重復(fù)實(shí)驗(yàn),如表1 所示,本文所述算法的調(diào)節(jié)時(shí)間較為穩(wěn)定,平均調(diào)節(jié)時(shí)間為0.08 s,調(diào)節(jié)速度較快。
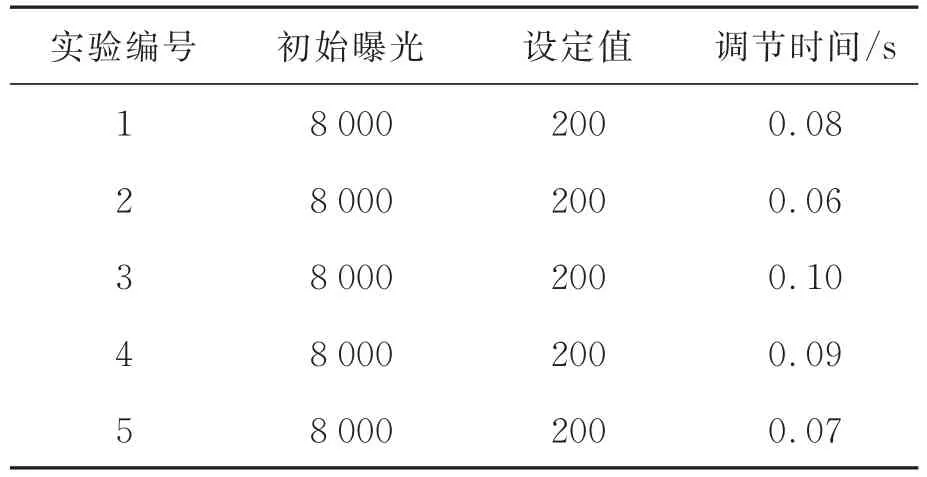
表1 曝光控制參數(shù)實(shí)驗(yàn)數(shù)據(jù)表Tab.1 Exposure control parameters experimental data
4.3.2 本文算法與相機(jī)硬件自動(dòng)曝光方法對(duì)比實(shí)驗(yàn)
工業(yè)相機(jī)自動(dòng)曝光采用硬件調(diào)節(jié),即使用相機(jī)自身感光器件通過像素陣列的數(shù)字控制和預(yù)處理電路進(jìn)行曝光控制[2],達(dá)到清晰化處理。本實(shí)驗(yàn)采用海康威視工業(yè)相機(jī)自身的自動(dòng)曝光功能控制,進(jìn)行相應(yīng)對(duì)比實(shí)驗(yàn)。實(shí)驗(yàn)中的相機(jī)成像圖如圖5 所示。
實(shí)驗(yàn)計(jì)算數(shù)據(jù)見表1 所示。根據(jù)上述實(shí)驗(yàn)數(shù)據(jù)分析,在同一亮度下,相機(jī)硬件自動(dòng)曝光算法的Laplacian 圖像標(biāo)準(zhǔn)差值較小,說明此時(shí)經(jīng)過Laplacian 算子變化后的圖像亮度分布較為分散,出現(xiàn)同亮的情況,邊緣較不突出,反映出抑制高亮能力較弱。相比較而言,本文算法的Laplacian圖像標(biāo)準(zhǔn)差值較大,說明邊緣突變明顯,圖像中的部分與周圍環(huán)境產(chǎn)生較大的對(duì)比度,反映出算法抑制環(huán)境亮度的能力較強(qiáng)。
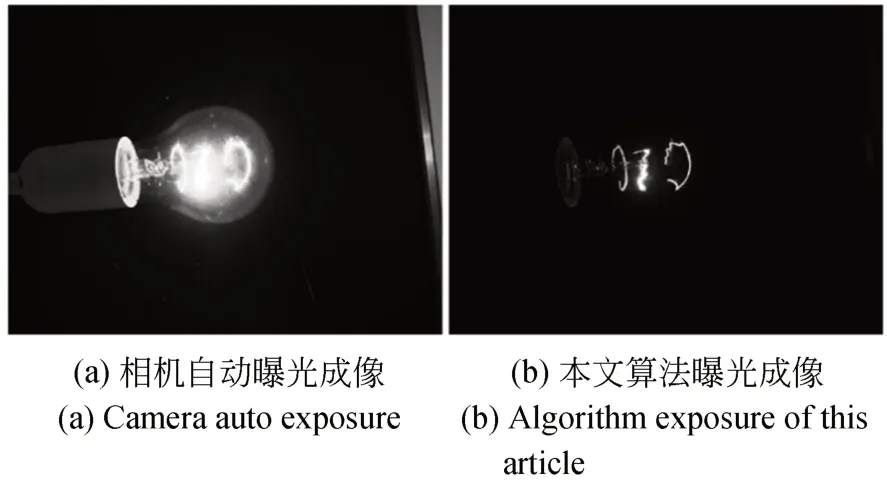
圖5 設(shè)置亮度自動(dòng)曝光調(diào)節(jié)對(duì)比圖Fig.5 Comparison with automatic exposure adjustment
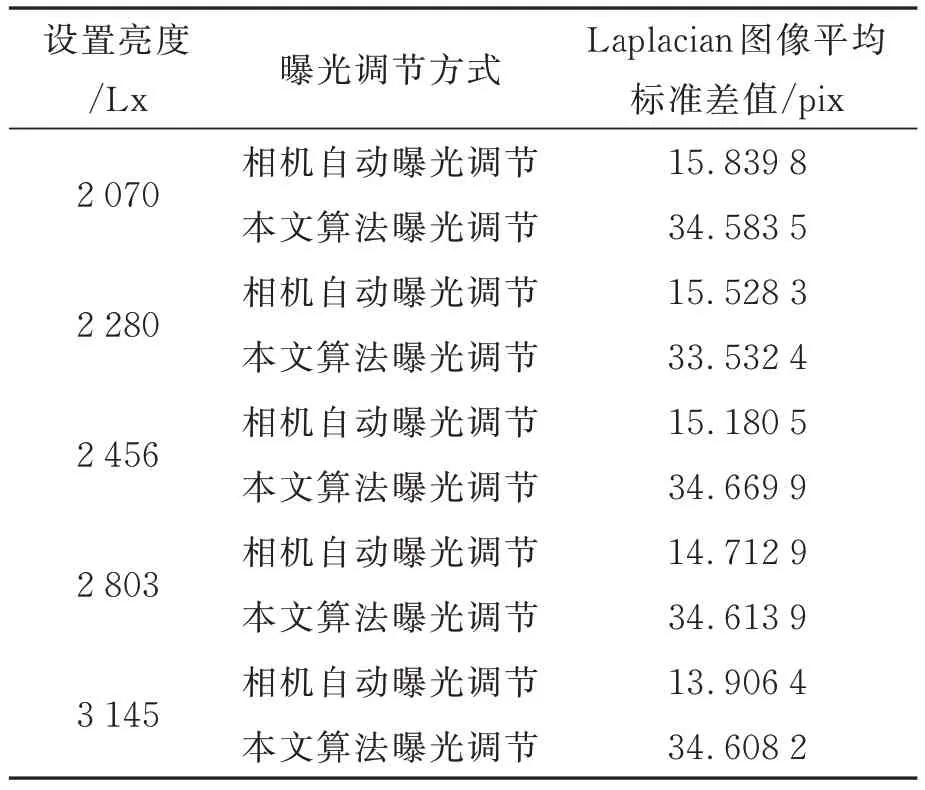
表2 與相機(jī)硬件自動(dòng)曝光方法對(duì)比實(shí)驗(yàn)數(shù)據(jù)表Tab.2 Comparison with the camera hardware automatic exposure method
4.3.3 本文算法與基于圖像直方圖特征的曝光調(diào)節(jié)法的對(duì)比實(shí)驗(yàn)
圖像直方圖是對(duì)圖像像素?cái)?shù)據(jù)分布的一種圖形表示方法,其特征可有效表征當(dāng)前圖像的亮度分布和特點(diǎn)。圖像灰度直方圖是灰度級(jí)的函數(shù),它代表在整個(gè)圖像中灰度值出現(xiàn)的像素個(gè)數(shù),從一定程度上反映了像素出現(xiàn)的頻率[18]。利用圖像灰度直方圖可以清晰的顯示出圖像中的灰度值分布,從而通過直方圖特征獲得相機(jī)曝光值的近似關(guān)系進(jìn)行調(diào)節(jié)。本次對(duì)比實(shí)驗(yàn)選用圖像直方圖的最大值特征作為曝光調(diào)節(jié)依據(jù),并采用階梯式調(diào)節(jié)方法,采取的直方圖調(diào)節(jié)方式見表3 所示。
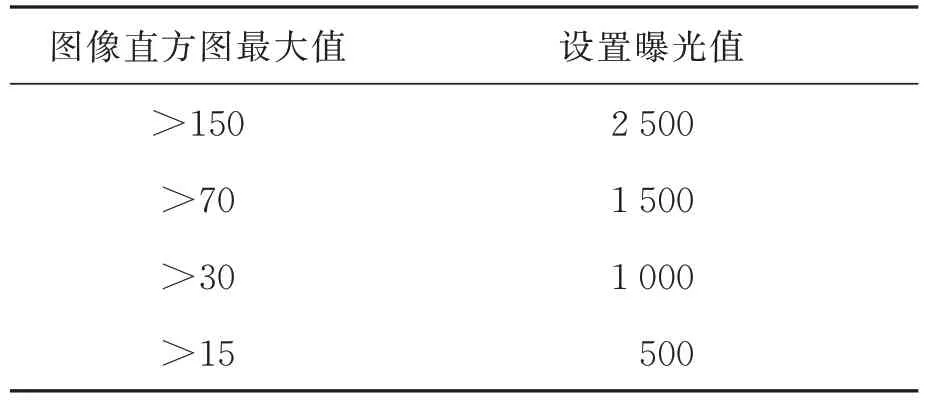
表3 直方圖曝光調(diào)節(jié)策略Tab.3 Histogram exposure adjustment strategy(pix)
實(shí)驗(yàn)中穩(wěn)定調(diào)節(jié)后的相機(jī)采集白熾燈圖像見圖6 所示,實(shí)驗(yàn)對(duì)比計(jì)算數(shù)據(jù)見表4 所示。
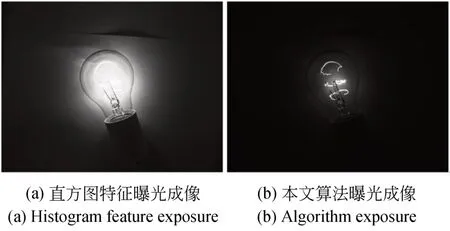
圖6 本文算法與直方圖曝光調(diào)節(jié)方法實(shí)驗(yàn)對(duì)比圖Fig.6 Comparison with histogram exposure adjustment
根據(jù)實(shí)驗(yàn)的對(duì)比數(shù)據(jù)可以看出,本文算法調(diào)節(jié)后的Laplacian 圖像標(biāo)準(zhǔn)差值相較于直方圖曝光調(diào)節(jié)方法具有較大的優(yōu)勢(shì)。在同一亮度下,本文算法調(diào)節(jié)后的Laplacian 圖像標(biāo)準(zhǔn)差值較大,說明圖像中具有邊緣較為凸顯的區(qū)域,即算法抑制了高光環(huán)境造成的亮斑和亮塊。
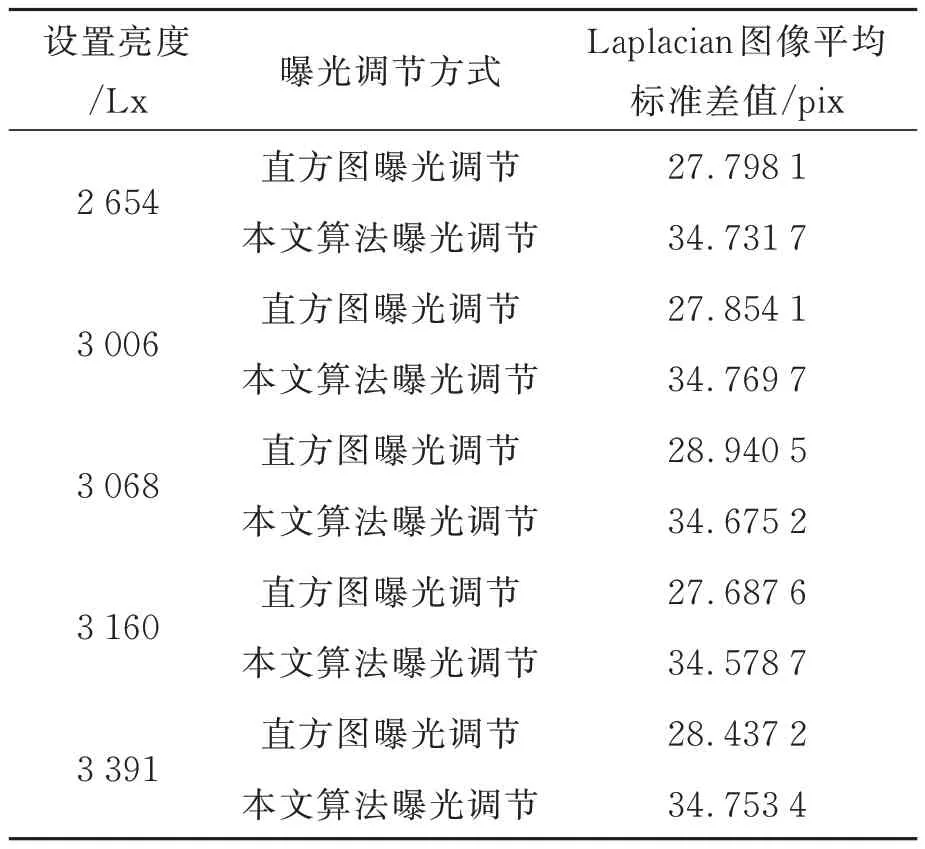
表4 與直方圖曝光調(diào)節(jié)方法的對(duì)比數(shù)據(jù)表Tab.4 Comparison with histogram exposure adjustment method
5 結(jié)論
本文提出了一種工業(yè)相機(jī)過曝光自適應(yīng)控制優(yōu)化算法。算法將區(qū)域平均灰度加權(quán)值作為反映圖像亮度強(qiáng)度標(biāo)準(zhǔn),通過反饋調(diào)節(jié)方法計(jì)算曝光值,之后通過基于改進(jìn)的“S”曲線對(duì)反饋調(diào)節(jié)的內(nèi)部參數(shù)進(jìn)行優(yōu)化調(diào)節(jié)控制,進(jìn)而實(shí)現(xiàn)對(duì)復(fù)雜環(huán)境的自適應(yīng)曝光調(diào)節(jié)。經(jīng)過實(shí)驗(yàn)論證,算法完成一次全過程調(diào)節(jié)耗時(shí)0.08 s。在同等條件下與相機(jī)硬件自動(dòng)曝光算法和基于圖像直方圖特征的自適應(yīng)曝光算法比較,所提算法的圖像Laplacian 平均標(biāo)準(zhǔn)差分別提高54.3% 和20.6%。在今后的研究中,將進(jìn)一步提高算法控制的平滑性以及更高的自適應(yīng)能力,并將其推廣至更多復(fù)雜環(huán)境中。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
