甘蔗收割機齒輪箱的模態分析與試驗驗證
2023-02-16 09:08:56陳棕
南方農機 2023年5期
陳 棕
(仙桃職業學院,湖北 仙桃 433000)
齒輪箱是甘蔗收割機中切頂裝置的重要組成部分,切頂裝置下裝有犁刀和帶齒輪的滾筒,其旋轉通過液壓馬達來實現,在甘蔗提升到一定高度時,切頂刀將頂部切掉。齒輪箱的振動情況直接關系到甘蔗機能否在高速運轉的情況下精確切到甘蔗的頂部,所以有必要對齒輪箱的振動情況進行分析。有限元模態分析結合相對應的模態試驗是解決此類問題最為適用和經濟的一種方法,通過分析和對比有限元軟件以及試驗的計算結果,可以充分驗證有限元模型的正確性與合理性。目前,國內對齒輪箱的研究比較缺乏,這使得本研究變得更加具有實際意義。
1 HyperWorks有限元分析的主要步驟
HyperWorks有限元分析的基本流程如圖1所示。其中主要的步驟可以歸納為以下幾個。
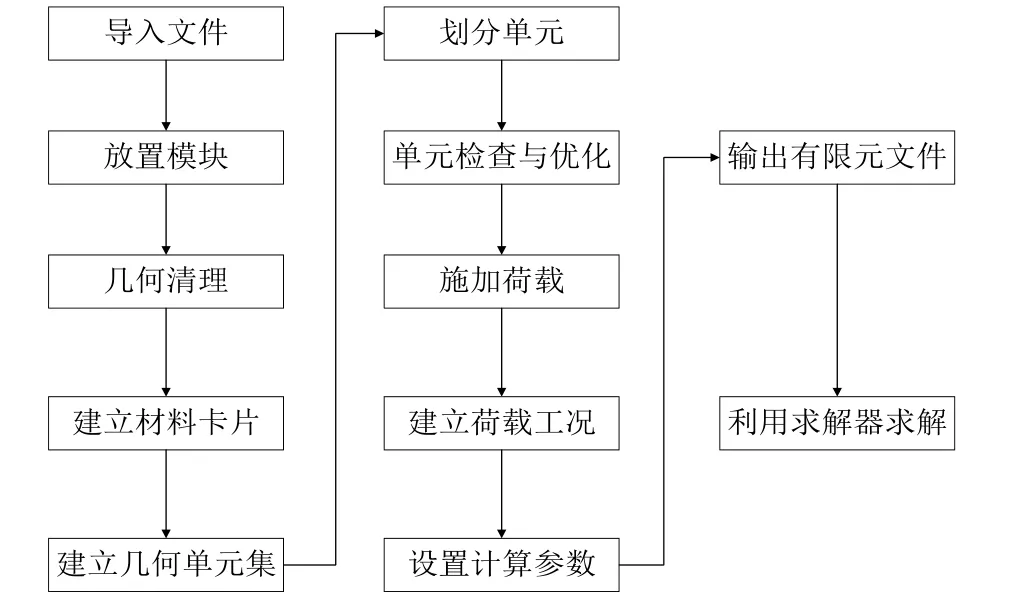
圖1 有限元分析基本流程圖
1)前處理:首先導入已經建立的三維幾何模型,然后對其進行幾何清理和修復,接著參考實際尺寸和目的性進行網格的劃分,最后檢查單元網格,控制好單元質量,然后進行相應的邊界設置[1]。
2)計算:可以根據程序所提供的各種求解方式,根據自己的實際情況選擇相應的求解方式。
3)后處理:以軟件計算結果為依據,對其加以必要的修飾后用計算機屏幕將分析對象的特征和性能進行動態顯示,以便設計者能針對分析結果進行合理的優化設計。
2 齒輪箱自由模態的有限元分析
2.1 齒輪箱有限元模型的建立
首先把用UG畫好的三維模型保存為IGES格式,IGES格式能夠很好地保證零件的質量和完整性,然后在HyperMesh中讀取所生成的IGES文件,由于齒輪箱形狀規則,主要由厚度較小的板件構成,因此這里采取抽取模型中面的方式來簡化模型,提高計算效率[2]。然后對模型進行網格劃分,網格單元尺寸為10 mm,主要由規則的四面體網格構成,這樣能相應減少計算誤差,網格劃分好后進行Check Elems命令檢查自動劃分的單元網格質量,其中包含長寬比、雅克比、最大角、最小角等[3],對不符合要求的單元進行調整和修改,確保所有網格都符合要求。接著對模型的所有零件賦予相應的材料和屬性,并檢查是否存在干涉,齒輪箱的材料常數取為:彈性模量E=2.07e5 MPa,泊松比μ=0.3,材料密度ρ=7.83e-9 t/mm3[4]。經HyperMesh軟件進行模型處理后的結果如圖2所示。
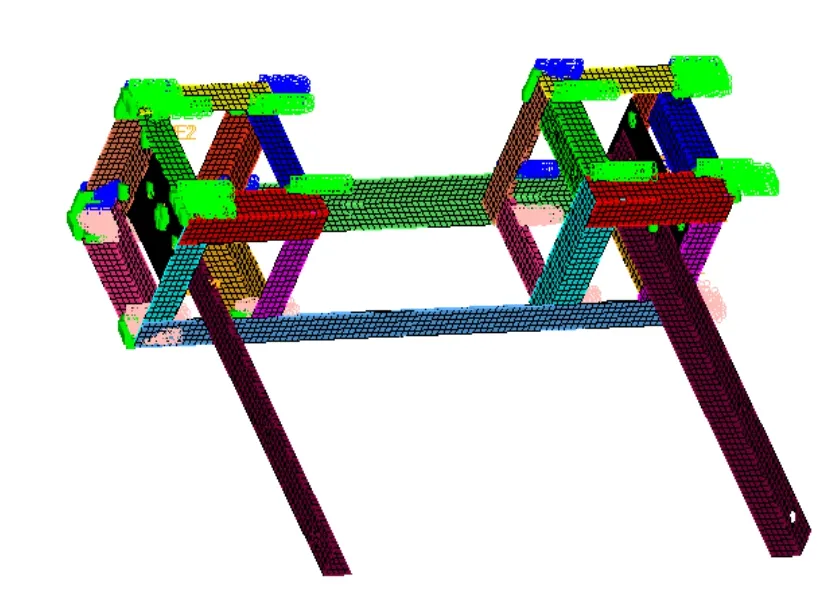
圖2 齒輪箱劃分網格后的有限元模型
2.2 齒輪箱有限元自由模態的分析
齒輪箱自由模態采用無約束的自由邊界件,選用Radioss作為求解器計算齒輪箱的前10階固有頻率和振型,由于前6階為剛體模態,頻率幾乎為零,所以不予考慮[5]。提取剩下的4階彈性模態的固有頻率和振型,為了使得零件的振型看得更加清楚,方便研究,這里將振型擴大10倍,前四階彈性模態的固有頻率如表1所示,與之對應的振型圖如圖3所示。
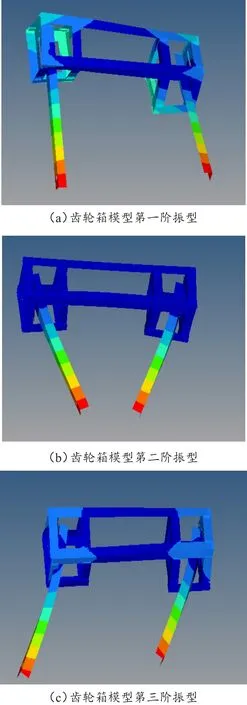
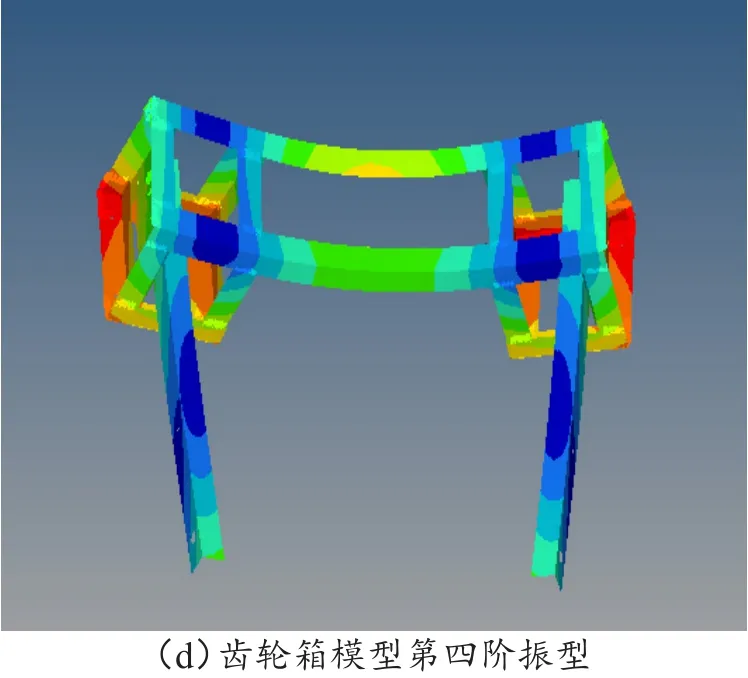
圖3 齒輪箱彈性模態前四階振型圖
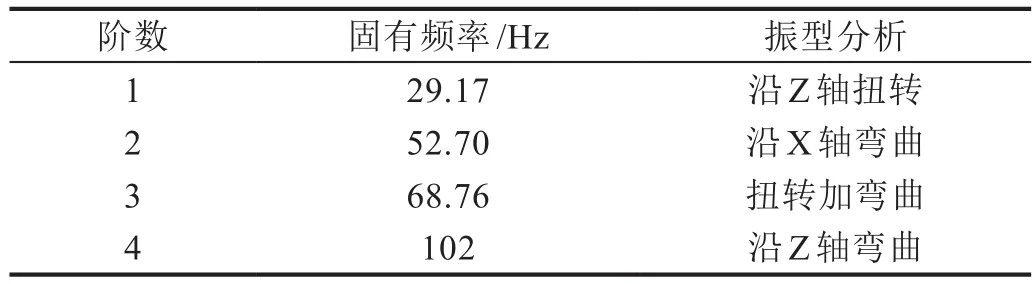
表1 齒輪箱前四階彈性模態固有頻率和振型
3 模態試驗與分析
3.1 模態分析理論
針對機械結構的振動特性,模態分析法是一種重要的技術手段,它通過模態參數來反映機械結構的動態特性,模態參數包括模態頻率、阻尼和振型[6]。其中模態參數可以由計算和試驗兩種手段得到,通常人們借助有限元軟件計算得到理論模態,采取試驗的方法獲取試驗模態。本研究采用HyperWorks里面的Opstrict模塊作為求解器求解模型的理論模態,采用西門子LMS設備采集試驗模態信號得到齒輪箱在力錘敲擊下的輸入與輸出函數,然后再經過曲線擬合手段來識別出齒輪箱的各項模態參數,識別模態參數的方法有很多,本研究采用PolyMAX的方法來計算和分析信號,以便得到相關模態參數[7]。
LMS公司采用PolyMAX(俗稱參考點最小二乘復頻域法)分析模態參數的方法是目前全球范圍內應用最廣泛的方法之一[8]。PolyMAX在更改系統誤差容限、抗噪聲干擾等方面具有很強的能力,能夠精準快捷地辨別出信號中的虛假模態。這種方法在稀疏模態系統(弱阻尼)和密集模態系統(強阻尼)中都能很好地識別參數。PolyMAX識別模態參數的思路為:建立頻率響應函數模型→建立穩態圖→判定真實的模態頻率、阻尼和參與因子。
通常情況下,通過有限元軟件計算得到理論模態和通過試驗方法得到的試驗模態之間會存在一定的誤差,因此需要將兩組數據進行對比分析,若兩組數據之間存在較小的誤差,則可判定為理論模態計算和試驗模態算法符合實際情況,分析結果可以用作后續產品的結構優化和設計,以節省每次改動遇到試驗分析的步驟,大大提高產品優化設計的效率,節約工作成本,縮短產品更新的周期[9]。
3.2 試驗方法與儀器介紹
1)物件的懸置:首先將齒輪箱實體模型用帶有彈性的尼龍繩吊機吊離地面,使齒輪箱達到一種類似于自由的邊界狀態,這樣能夠很好地避免周圍環境和支撐剛度對試驗的影響。齒輪箱懸置圖如圖4所示。

圖4 齒輪箱懸置圖
2)激勵方法和激振點的選擇:目前被廣泛應用的激勵方法有錘擊法和激振器法兩種[10]。由于本次測試的目標體積較小,為了使試驗更加有效率,故采用錘擊法。在選擇激振點時,一方面要盡可能避開任一振型節點,另一方面激振點應該選擇在激勵能量傳遞較好的地方,使其能夠基本上反映出物件的結構輪廓。按照相應的選取標準,本次試驗一共選取了22個測試點,總共需要分為三組來進行試驗。選擇好測點之后,在齒輪箱對應的地方做好標識和編號,由于齒輪箱形狀較為規則,這里編號應該盡量避免交叉現象,這樣方便試驗時快速布置傳感器,提高工作效率。然后根據測點的位置,在電腦中打開LMS Test.Lab12A軟件里面的Geometry模塊進行幾何建模,接著對每個傳感器進行通道設置,其中包含待測點的方向、輸入模式、測量的單位和傳感器的量程等參數。再把Channel Setup中的幾何通道和Geometry模塊中建立的幾何節點相關聯,關聯完成后,將帶寬設置為256 Hz。齒輪箱模型具體的測點布置圖如圖5所示。
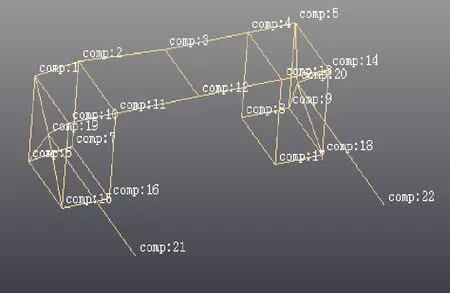
圖5 測點布置圖
3)試驗模態采集設備:西門子公司LMS采集設備1臺,移動筆記本電腦1臺(裝有LMS Test.Lab 12A模態分析軟件),美國PCB力錘1個(配備力傳感器),美國PCB三軸加速傳感器12個,連接線若干。
試驗儀器設備連接圖如圖6所示。
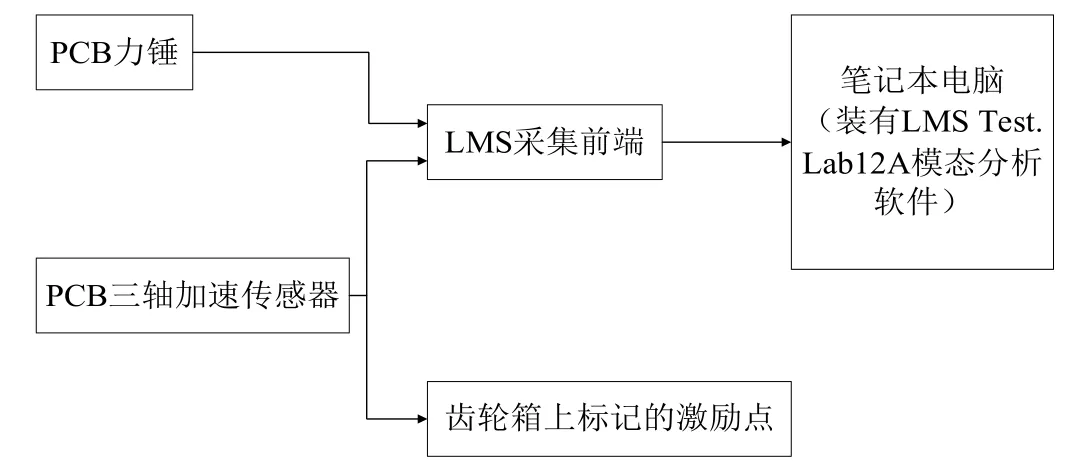
圖6 儀器設備連接圖
3.3 模態參數識別
將測量儀器和采集設備調試好以后,需要對激勵點和響應點進行互易性的排查檢驗,從而避免試驗誤差,保障數據采集試驗的精度。基于PolyMAX的方法,結合有限元計算結果,本研究選取了齒輪箱在0~150 Hz頻率之間的穩態分布圖,如圖7所示。在穩態圖中,“S”表示著模態頻率、阻尼比和模態參與因子在所給帶寬內不隨階次的變化而變化的極點,所以應該選擇“S”相對比較集中的地方作為模態頻率的分析點,這樣有利于識別出齒輪箱的所有模態。
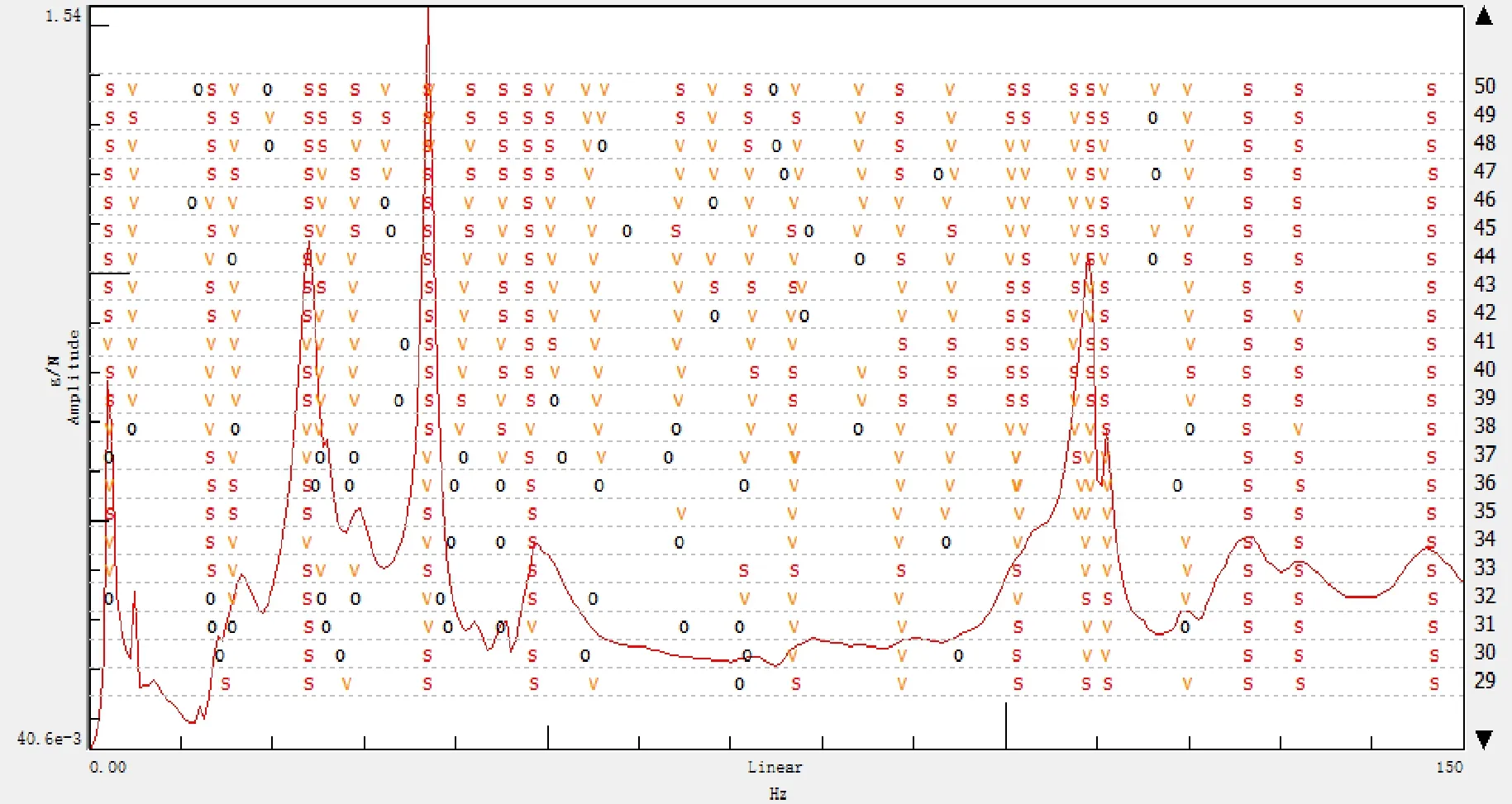
圖7 齒輪箱0~150 Hz穩態圖
3.4 分析結果
通過上述標準選擇所關心的極點后,通過Modal Analysis模塊的shapes界面對車架振型進行計算,參考有限元計算結果,通過對數據結果的篩選,得到與有限元結果相對應的前四階頻率和前四階振型。其中前四階振型如圖8所示。
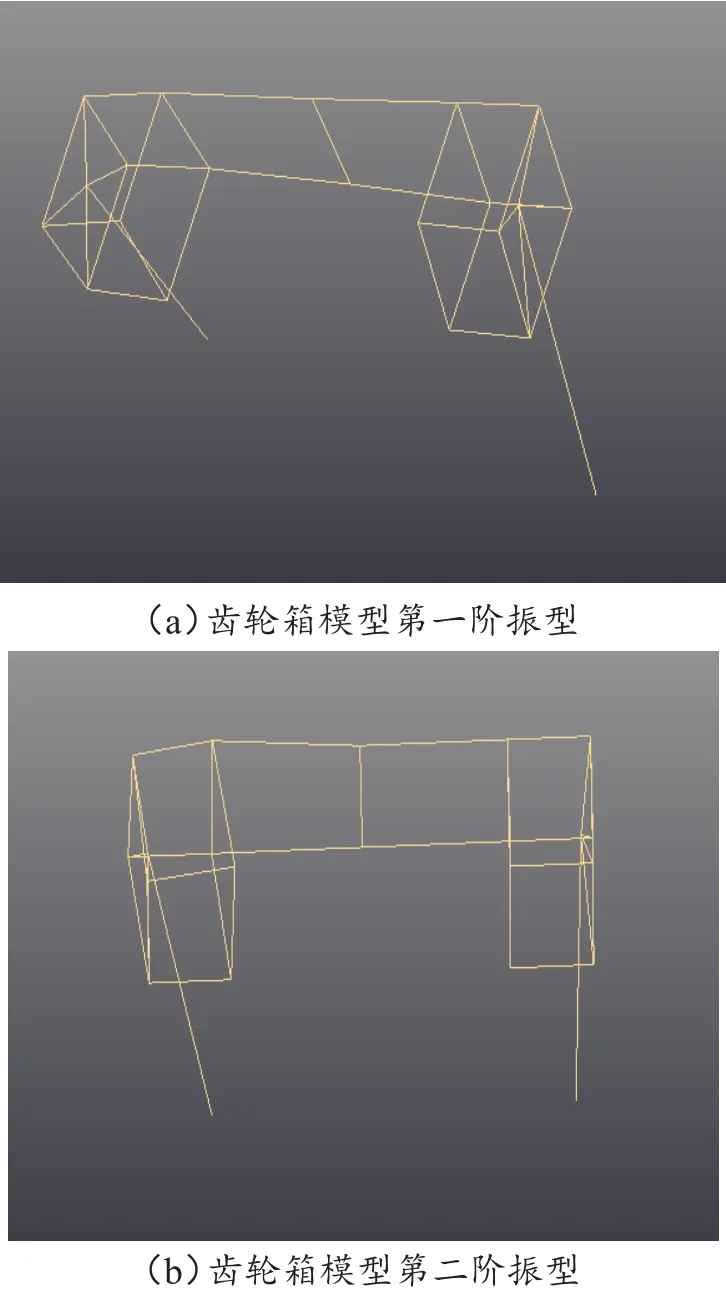
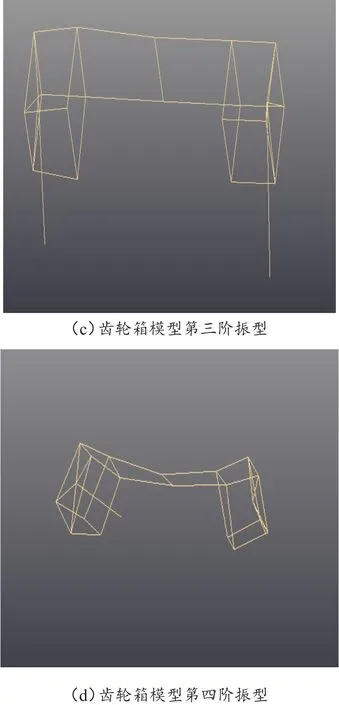
圖8 齒輪箱試驗模態前四階振型圖
3.5 理論模態與試驗模態的對比
齒輪箱通過有限元分析計算和試驗研究所得到的模態參數如表2所示。其中不同階數下通過軟件計算所得到的頻率和通過試驗得到的頻率之間均存在一定的誤差,最大相對誤差為11.8%,最小相對誤差為3.4%,考慮到環境、設備等客觀因素的影響,10%左右也基本在試驗誤差允許的范圍之內,因此本次試驗認定為有效試驗,試驗結果具有參考價值。

表2 計算模態與試驗模態結果的對比
4 結論
綜上所述,筆者基于LMS試驗與HyperWorks的有限元計算法對甘蔗收割機中齒輪箱的自由模態進行研究,通過對比理論模態與試驗模態,發現兩者之間的相對誤差控制在10%左右,誤差較小且振型基本相符合,故可以驗證有限元模型和分析方法的正確性。鑒于目前甘蔗收割機已經得到了廣泛的應用,國內對其齒輪箱的研究又非常少,故本次分析的模型與試驗所得數據將為之后的優化設計提供參考。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:39
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
船海工程(2013年6期)2013-03-11 18:57:27
