基于超螺旋滑模擾動(dòng)觀測(cè)器的永磁同步電機(jī)無(wú)傳感器抗干擾控制策略研究
2023-02-16 07:12:54韓琨張長(zhǎng)征袁雷
包裝工程 2023年3期
韓琨,張長(zhǎng)征,袁雷
基于超螺旋滑模擾動(dòng)觀測(cè)器的永磁同步電機(jī)無(wú)傳感器抗干擾控制策略研究
韓琨,張長(zhǎng)征,袁雷
(湖北工業(yè)大學(xué),武漢 430000)
提高包裝行業(yè)中自動(dòng)化設(shè)備的工作精準(zhǔn)度,優(yōu)化傳統(tǒng)永磁同步電機(jī)無(wú)傳感器控制系統(tǒng)的穩(wěn)定性,提高電機(jī)遭遇內(nèi)外擾動(dòng)后的系統(tǒng)魯棒性和抗擾動(dòng)性能。引入超螺旋滑模算法,設(shè)計(jì)一種超螺旋滑模MRAS觀測(cè)器來提高系統(tǒng)的穩(wěn)定性,同時(shí)利用滑模擾動(dòng)觀測(cè)器對(duì)電機(jī)良好的動(dòng)態(tài)進(jìn)行性能追蹤,利用超螺旋滑模算法對(duì)其進(jìn)行性能優(yōu)化,提出超螺旋滑模MRAS觀測(cè)器和超螺旋滑模擾動(dòng)觀測(cè)器對(duì)永磁同步電機(jī)復(fù)合控制的策略。該方案有效降低了電機(jī)遭遇擾動(dòng)時(shí)轉(zhuǎn)速估計(jì)誤差,誤差在0.8 r/min附近波動(dòng),明顯提高了電機(jī)控制系統(tǒng)遭遇干擾后的響應(yīng)速度。在MATLAB/SIMULINK中進(jìn)行實(shí)驗(yàn)仿真,結(jié)果表明所提控制策略提高了系統(tǒng)的魯棒性和追蹤精度,加強(qiáng)了系統(tǒng)的抗干擾能力。
永磁同步電機(jī);超螺旋滑模;模型自適應(yīng)觀測(cè)器;滑模擾動(dòng)觀測(cè)器;動(dòng)態(tài)追蹤
近年來,隨著國(guó)家經(jīng)濟(jì)不斷發(fā)展,居民生活水平提高,包裝行業(yè)高速發(fā)展,包裝產(chǎn)業(yè)在給人們帶來大量方便的同時(shí)也面臨嚴(yán)峻的考驗(yàn)[1]。任何包裝產(chǎn)業(yè)都需要自動(dòng)化設(shè)備來提高工作效率,尤其是包裝工藝復(fù)雜且具有難度的行業(yè)則更甚[2]。
影響包裝產(chǎn)業(yè)發(fā)展的主要環(huán)節(jié)是伺服電機(jī)驅(qū)動(dòng)系統(tǒng),行業(yè)通過控制電機(jī)來完成精細(xì)的包裝活動(dòng)[3],現(xiàn)在應(yīng)用于包裝領(lǐng)域的電機(jī)驅(qū)動(dòng)系統(tǒng)大多數(shù)是以永磁同步電機(jī)(Permanent Magnet Synchronous Motor, PMSM)為主的控制系統(tǒng)。在包裝產(chǎn)業(yè)的發(fā)展過程中,電機(jī)控制技術(shù)也不斷進(jìn)步,逐漸從能耗高、性能差向高端發(fā)展[4-5]。無(wú)傳感器控制技術(shù)已經(jīng)逐漸成為現(xiàn)代電機(jī)控制技術(shù)的發(fā)展趨勢(shì),它通過檢測(cè)電機(jī)繞組中的相關(guān)電信號(hào),利用先進(jìn)的控制算法對(duì)電機(jī)的實(shí)時(shí)運(yùn)行狀態(tài)進(jìn)行監(jiān)測(cè),對(duì)轉(zhuǎn)速、轉(zhuǎn)矩等電機(jī)參數(shù)進(jìn)行估計(jì)[6-9]。文獻(xiàn)[10-12]介紹了模型參考自適應(yīng)系統(tǒng)(Model Reference Adaptive System, MRAS),MRAS是現(xiàn)代電機(jī)控制技術(shù)中無(wú)傳感器控制應(yīng)用較廣泛的一種,但是傳統(tǒng)MRAS觀測(cè)器中PI控制算法抗擾動(dòng)能力和魯棒性能一般。文獻(xiàn)[13-14]介紹了超螺旋算法及二階滑模控制基本原理,表明二階滑模可以提高系統(tǒng)的魯棒性。文獻(xiàn)[15-17]通過對(duì)傳統(tǒng)滑模控制進(jìn)行介紹,表明滑模控制是一種特殊的非線性控制系統(tǒng),應(yīng)用于很多領(lǐng)域和行業(yè),滑模面和滑模增益是影響其穩(wěn)定性的2個(gè)因素,合適的參數(shù)設(shè)置可以使被控對(duì)象在達(dá)到快速收斂目的同時(shí)避免由增益過大導(dǎo)致電機(jī)運(yùn)行過程中出現(xiàn)過度抖振的現(xiàn)象。文獻(xiàn)[18-20]介紹的滑模擾動(dòng)觀測(cè)器可以用于系統(tǒng)的負(fù)載監(jiān)測(cè)和跟蹤反饋,當(dāng)系統(tǒng)受到擾動(dòng)時(shí),擾動(dòng)觀測(cè)器會(huì)估計(jì)擾動(dòng)誤差并前饋至系統(tǒng),系統(tǒng)進(jìn)行及時(shí)調(diào)整。
文中設(shè)計(jì)的超螺旋滑模MRAS觀測(cè)器可提高系統(tǒng)的魯棒性和穩(wěn)定性,擾動(dòng)觀測(cè)器可以有效地對(duì)系統(tǒng)外部擾動(dòng)和內(nèi)部擾動(dòng)進(jìn)行監(jiān)測(cè),結(jié)合超螺旋滑模與滑模擾動(dòng)觀測(cè)器的優(yōu)點(diǎn),提出超螺旋滑模擾動(dòng)觀測(cè)器來提高系統(tǒng)的抗干擾能力;并且提出復(fù)合控制的策略提高系統(tǒng)的抗干擾能力和魯棒性能,通過仿真驗(yàn)證所述方法的有效性。
1 PMSM數(shù)學(xué)模型
PMSM是一個(gè)強(qiáng)耦合,復(fù)雜且難以控制的非線性系統(tǒng),為了更好地控制三相PMSM,文中選擇同步旋轉(zhuǎn)坐標(biāo)系–下的數(shù)學(xué)模型,其定子電壓方程為:
磁鏈方程為:

電磁轉(zhuǎn)矩方程為:
運(yùn)動(dòng)方程為:
2 超螺旋滑模模型自適應(yīng)觀測(cè)器
MRAS是自適應(yīng)系統(tǒng)的一種控制策略,MRAS包含可調(diào)模型、參考模型和自適應(yīng)律3個(gè)部分。MRAS的工作原理是利用參考模型和可調(diào)模型的輸出量之差作為信號(hào),通過所確定的自適應(yīng)律來實(shí)現(xiàn)對(duì)PMSM的參數(shù)辨識(shí)并反饋到控制系統(tǒng)中。因此,自適應(yīng)律的穩(wěn)定直接影響到MRAS觀測(cè)器的性能,而傳統(tǒng)MRAS觀測(cè)器中的PI自適應(yīng)律魯棒性低,當(dāng)系統(tǒng)擾動(dòng)較大時(shí)會(huì)引起電機(jī)系統(tǒng)的不穩(wěn)定。文中引入一種優(yōu)于PI自適應(yīng)律的超螺旋滑模自適應(yīng)律來提高系統(tǒng)的魯棒性,下面介紹傳統(tǒng)MRAS觀測(cè)器的工作過程。
2.1 傳統(tǒng)MRAS觀測(cè)器設(shè)計(jì)
由表貼式三相PMSM數(shù)學(xué)模型得到定子電流方程如下:
為得到可調(diào)模型,不妨定義:

則得到可調(diào)模型為:
寫成狀態(tài)空間表達(dá)式,即:

狀態(tài)空間表達(dá)式變?yōu)椋?/p>


根據(jù)Popov超穩(wěn)定性理論可得:


對(duì)其積分可以求得轉(zhuǎn)子位置估計(jì)值:
傳統(tǒng)MRAS觀測(cè)器的實(shí)現(xiàn)框圖見圖1。
2.2 超螺旋滑模自適應(yīng)律
超螺旋滑模屬于滑模變結(jié)構(gòu)的一種,具有對(duì)參數(shù)變化不敏感、魯棒性強(qiáng)、動(dòng)態(tài)性能好等優(yōu)點(diǎn)。超螺旋滑模獨(dú)特的二階滑模結(jié)構(gòu)可以降低傳統(tǒng)一階滑模變控制的抖振現(xiàn)象,在PMSM出現(xiàn)擾動(dòng)變化時(shí)保證平滑穩(wěn)定的輸出。式(16)給出超螺旋滑模的基本形式。
下面設(shè)計(jì)超螺旋滑模MRAS控制器,采用超螺旋滑模自適應(yīng)律對(duì)傳統(tǒng)MRAS觀測(cè)器進(jìn)行優(yōu)化,設(shè)置滑模面:


2.3 穩(wěn)定性證明
根據(jù)Lyapunov定理,選取狀態(tài)矢量為:



代入得:
3 超螺旋滑模擾動(dòng)觀測(cè)器
3.1 PMSM擾動(dòng)觀測(cè)器設(shè)計(jì)
由PMSM的機(jī)械運(yùn)動(dòng)方程和轉(zhuǎn)矩方程可以得到PMSM動(dòng)態(tài)方程:

定義電機(jī)參數(shù)及參數(shù)的變化量為:
式中:n、n、n為常規(guī)參數(shù)變量;?n、?n、?n為參數(shù)變化量,那么在考慮電機(jī)運(yùn)行過程中內(nèi)部參數(shù)變化和外部擾動(dòng)情況下,可得:

結(jié)合式(28)重寫電機(jī)運(yùn)動(dòng)動(dòng)態(tài)方程,可得:

滑模擾動(dòng)觀測(cè)器控制框圖見圖2。
3.2 超螺旋滑模擾動(dòng)觀測(cè)器
根據(jù)PMSM動(dòng)態(tài)方程構(gòu)建滑模擾動(dòng)觀測(cè)器方程:
超螺旋滑模對(duì)傳統(tǒng)滑模擾動(dòng)觀測(cè)器進(jìn)行優(yōu)化,提高系統(tǒng)擾動(dòng)觀測(cè)速度和反饋靈敏度,在電機(jī)出現(xiàn)內(nèi)部擾動(dòng)和負(fù)載突變的情況時(shí),迅速捕捉到擾動(dòng)情況,實(shí)時(shí)估計(jì)擾動(dòng)并前饋到轉(zhuǎn)速控制環(huán)節(jié)中,提高系統(tǒng)的抗干擾能力。
結(jié)合式(16)可得超螺旋滑模擾動(dòng)觀測(cè)器方程:

與動(dòng)態(tài)方程相減可以得到誤差動(dòng)態(tài)方程:
3.3 PMSM復(fù)合控制策略
PMSM轉(zhuǎn)速范圍廣,負(fù)載變化大,傳感器無(wú)法時(shí)時(shí)刻刻對(duì)電機(jī)參數(shù)保持較高的捕捉靈敏度,長(zhǎng)時(shí)間的工作運(yùn)行會(huì)導(dǎo)致電機(jī)的電阻、電感、永磁體發(fā)生變化。本文基于超螺旋滑模擾動(dòng)觀測(cè)器與超螺旋滑模MRAS觀測(cè)器提出了復(fù)合控制策略:超螺旋滑模MRAS觀測(cè)器對(duì)電機(jī)參數(shù)進(jìn)行實(shí)時(shí)捕捉和計(jì)算,并將部分系統(tǒng)參數(shù)反饋到超螺旋滑模擾動(dòng)觀測(cè)器;對(duì)超螺旋滑模擾動(dòng)觀測(cè)器系統(tǒng)擾動(dòng)進(jìn)行實(shí)時(shí)監(jiān)測(cè),將擾動(dòng)估計(jì)值前饋至轉(zhuǎn)速環(huán),提高轉(zhuǎn)速控制環(huán)對(duì)系統(tǒng)參數(shù)的反應(yīng)靈敏度,提高系統(tǒng)抗擾動(dòng)的能力和魯棒性能,達(dá)到復(fù)合控制的目的。控制框圖見圖3。
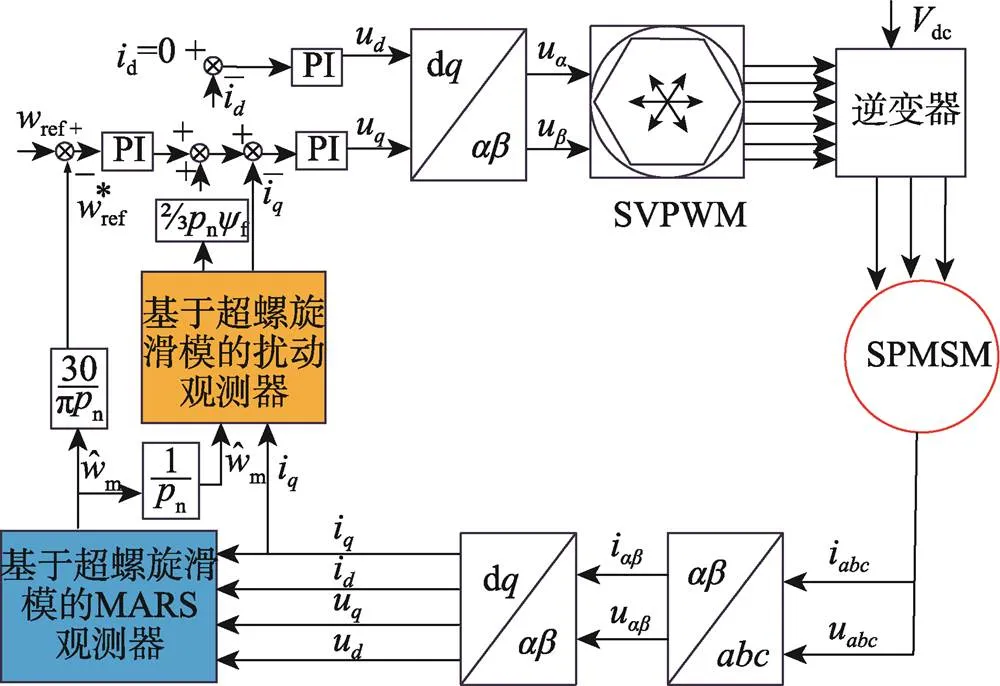
圖3 基于超螺旋滑模控制的PMSM無(wú)傳感器控制系統(tǒng)的控制框圖
4 仿真實(shí)驗(yàn)
文中以MATLAB/SIMULINK為平臺(tái)進(jìn)行仿真研究來驗(yàn)證2種觀測(cè)器的有效性。為了驗(yàn)證超螺旋滑模MRAS觀測(cè)器和超螺旋滑模擾動(dòng)觀測(cè)器的性能,文中設(shè)計(jì)了3種仿真研究方案。
1)方案1,主要驗(yàn)證所設(shè)計(jì)的超螺旋滑模MRAS觀測(cè)器的有效性,即速度控制器采用PI,將速度觀測(cè)器分別采用傳統(tǒng)MRAS觀測(cè)器和超螺旋滑模MRAS觀測(cè)器進(jìn)行對(duì)比仿真分析。
2)方案2,主要驗(yàn)證所設(shè)計(jì)的超螺旋滑模擾動(dòng)觀測(cè)器的有效性,即速度控制器采用PI,將擾動(dòng)觀測(cè)器采用傳統(tǒng)滑模觀測(cè)器和超螺旋滑模擾動(dòng)觀測(cè)器進(jìn)行對(duì)比仿真分析。
3)方案3,主要驗(yàn)證所設(shè)計(jì)的復(fù)合控制策略的有效性,即PI控制,將單一超螺旋滑模MRAS觀測(cè)器控制和復(fù)合控制進(jìn)行對(duì)比仿真分析。所用SPMSM參數(shù)見表1。
表1 電機(jī)參數(shù)

Tab.1 Motor parameters
4.1 2種MRAS觀測(cè)器對(duì)比仿真分析
系統(tǒng)額定轉(zhuǎn)速為1 000 r/min,電機(jī)空載啟動(dòng),在0.2 s時(shí)突加負(fù)載20 N·m,0.4 s時(shí)突降負(fù)載至10 N·m,對(duì)2種觀測(cè)器設(shè)置合適參數(shù),使系統(tǒng)達(dá)到穩(wěn)定,分別從轉(zhuǎn)速估計(jì)誤差和轉(zhuǎn)子位置估計(jì)誤差兩方面來進(jìn)行對(duì)比,仿真結(jié)果見圖4—5。
從圖4仿真結(jié)果可以看出,當(dāng)電機(jī)從零速上升到參考轉(zhuǎn)速1 000 r/min時(shí),2種觀測(cè)器都有一定的超調(diào)量。0.2 s負(fù)載突變時(shí)對(duì)比2種MRAS觀測(cè)器可知,超螺旋滑模MRAS觀測(cè)器轉(zhuǎn)速恢復(fù)時(shí)間為0.054 s,傳統(tǒng)MRAS觀測(cè)器轉(zhuǎn)速恢復(fù)時(shí)間為0.061 s;0.4 s負(fù)載突變時(shí)對(duì)比2種MRAS觀測(cè)器可知,超螺旋滑模MRAS觀測(cè)器轉(zhuǎn)速恢復(fù)時(shí)間為0.045 s,傳統(tǒng)MRAS觀測(cè)器轉(zhuǎn)速恢復(fù)時(shí)間為0.051 s。由圖4—5可知,改進(jìn)后的超螺旋滑模MRAS觀測(cè)器在負(fù)載突變時(shí)轉(zhuǎn)速恢復(fù)時(shí)間較短,滑模動(dòng)態(tài)穩(wěn)定性好,較傳統(tǒng)MRAS觀測(cè)器系統(tǒng)魯棒性能提高。在負(fù)載突變時(shí)分析轉(zhuǎn)速估計(jì)誤差和轉(zhuǎn)子位置估計(jì)誤差,傳統(tǒng)MRAS觀測(cè)器的轉(zhuǎn)速估計(jì)誤差波動(dòng)量為60 r/min,轉(zhuǎn)子位置估計(jì)誤差波動(dòng)量為6 r/min,超螺旋滑模MRAS觀測(cè)器轉(zhuǎn)速估計(jì)誤差波動(dòng)量穩(wěn)定在0,轉(zhuǎn)子位置估計(jì)誤差波動(dòng)量為0。
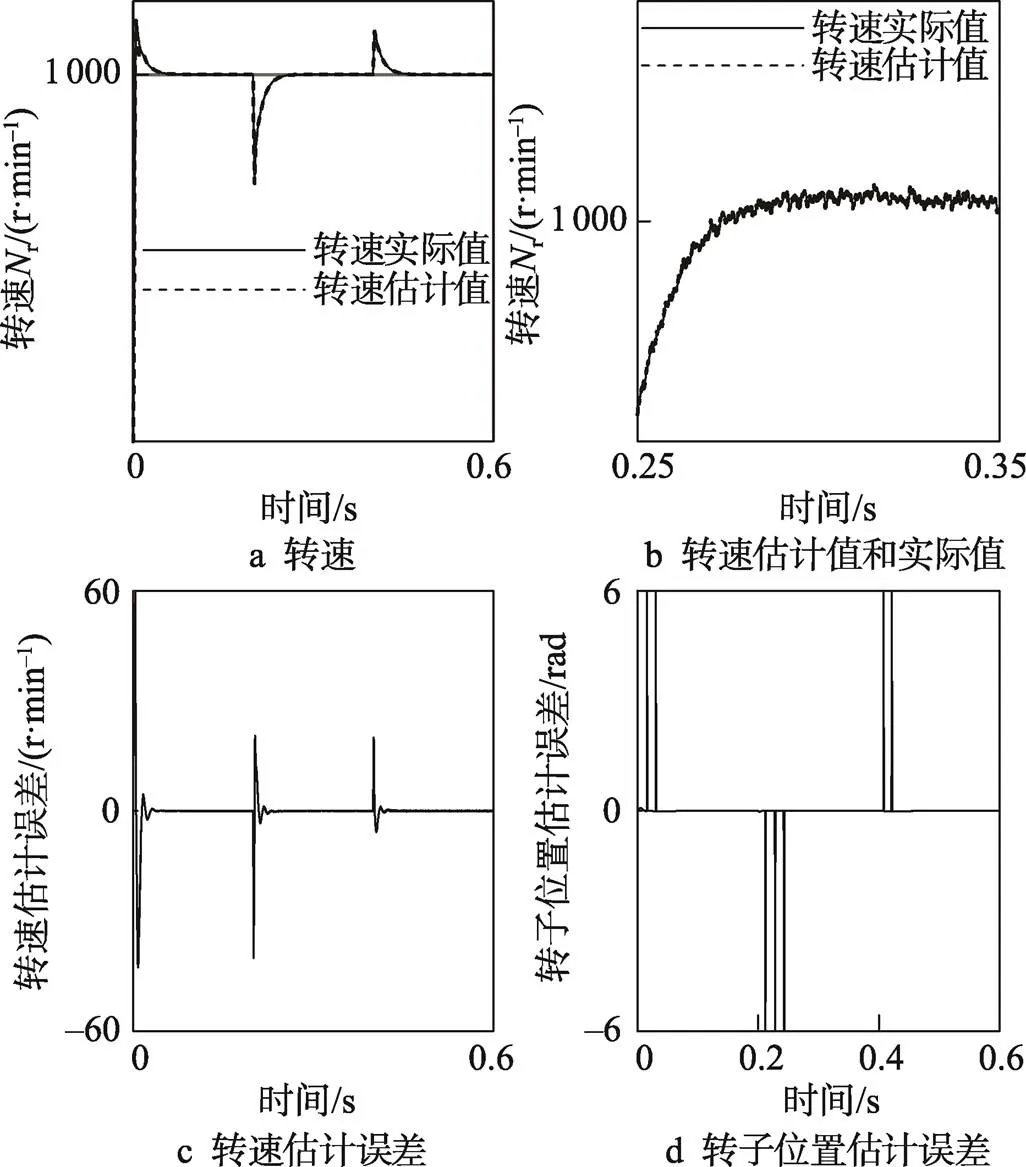
圖4 傳統(tǒng)MRAS觀測(cè)器的仿真結(jié)果
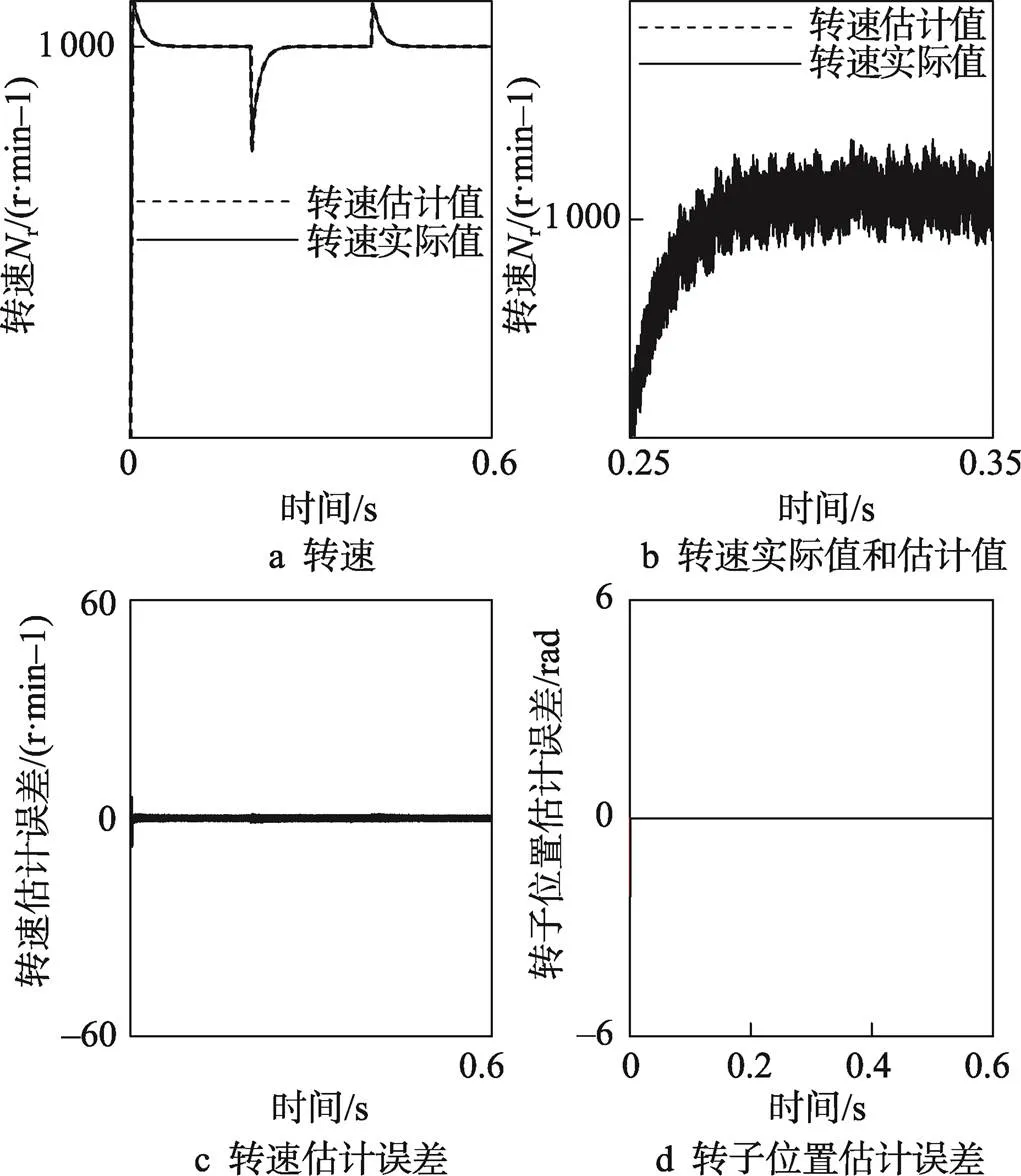
圖5 超螺旋滑模MRAS觀測(cè)器的仿真結(jié)果
仿真結(jié)果驗(yàn)證了改進(jìn)后的超螺旋滑模MRAS觀測(cè)器的有效性,提高了系統(tǒng)受到擾動(dòng)后的反應(yīng)靈敏度,轉(zhuǎn)速誤差和轉(zhuǎn)子位置誤差波動(dòng)穩(wěn)定在0附近,具有光滑平穩(wěn)的工作波形,提高了系統(tǒng)的魯棒性能和動(dòng)態(tài)穩(wěn)定性。
4.2 2種滑模擾動(dòng)觀測(cè)器對(duì)比仿真分析
系統(tǒng)額定轉(zhuǎn)速為1 000 r/min,電機(jī)空載啟動(dòng),在0.2 s時(shí)突加負(fù)載20 N·m,0.4 s時(shí)突降負(fù)載至10 N·m,對(duì)2種擾動(dòng)觀測(cè)器設(shè)置合適參數(shù),使系統(tǒng)達(dá)到穩(wěn)定,分別從轉(zhuǎn)矩估計(jì)誤差和轉(zhuǎn)矩跟蹤效果兩方面來進(jìn)行對(duì)比,仿真結(jié)果見圖6—7。
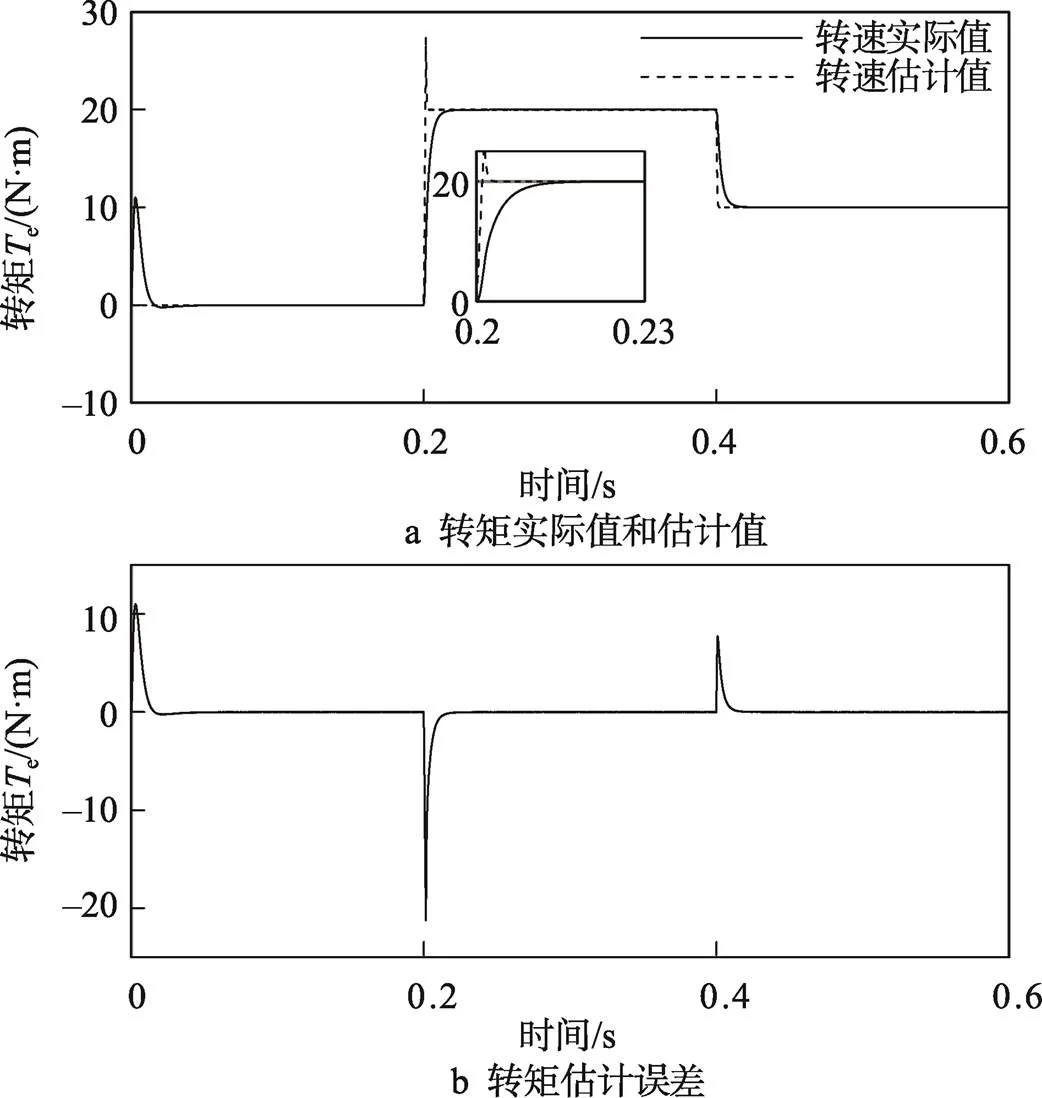
圖6 傳統(tǒng)滑模擾動(dòng)觀測(cè)器的仿真結(jié)果
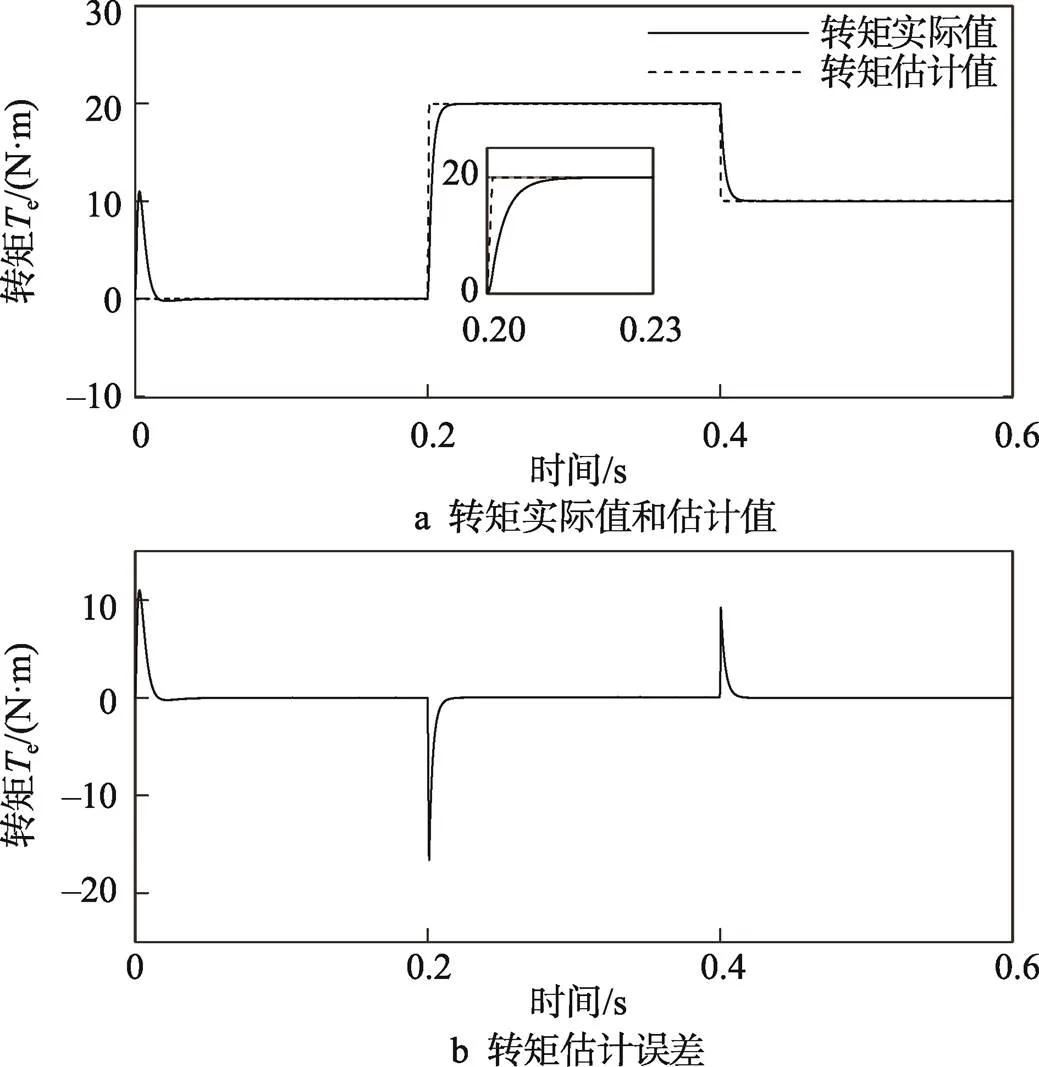
圖7 超螺旋滑模擾動(dòng)觀測(cè)器的仿真結(jié)果
從圖6可以看出,當(dāng)電機(jī)負(fù)載突增至20 N·m,傳統(tǒng)滑模擾動(dòng)觀測(cè)器的超調(diào)量為8.8 N·m,當(dāng)負(fù)載降至10 N·.m時(shí),有良好的追蹤效果;在0.2 s時(shí),轉(zhuǎn)矩估計(jì)誤差為21.2 N·m;在0.4 s時(shí),轉(zhuǎn)矩估計(jì)誤差為7.4 N·m,說明負(fù)載變化量過大時(shí),傳統(tǒng)滑模擾動(dòng)觀測(cè)器追蹤效果一般。
從圖7可以看出,當(dāng)電機(jī)負(fù)載突增至20 N·m,超螺旋滑模擾動(dòng)觀測(cè)器超調(diào)量為0,2次負(fù)載變化都有較好的追蹤效果;在0.2 s時(shí),轉(zhuǎn)矩估計(jì)誤差為16.31 N·m;在0.4 s時(shí),轉(zhuǎn)矩估計(jì)誤差為7.8 N·m。仿真結(jié)果驗(yàn)證了超螺旋滑模擾動(dòng)觀測(cè)器的有效性,在負(fù)載變化大的情況下仍保持良好的追蹤效果,追蹤曲線光滑,貼合實(shí)際工作曲線。
4.3 3種控制策略對(duì)比仿真分析
系統(tǒng)額定轉(zhuǎn)速為1 000 r/min,電機(jī)空載啟動(dòng),在0.2 s時(shí)突加負(fù)載20 N·m,0.4 s時(shí)突降負(fù)載至10 N·m,對(duì)3種控制策略設(shè)置合適參數(shù),使系統(tǒng)達(dá)到穩(wěn)定。對(duì)3種控制策略的電機(jī)轉(zhuǎn)速、轉(zhuǎn)矩,以及系統(tǒng)的動(dòng)態(tài)穩(wěn)定和魯棒性進(jìn)行分析判斷,仿真結(jié)果見圖8—9。
從圖8分析可知,當(dāng)電機(jī)零速啟動(dòng)和負(fù)載變化時(shí),3種控制策略都有一定的轉(zhuǎn)速超調(diào)量,根據(jù)表2分析傳統(tǒng)PI控制、超螺旋滑模MRAS觀測(cè)器控制和復(fù)合控制下的轉(zhuǎn)速恢復(fù)時(shí)間。其中復(fù)合控制策略的收斂速度最快為0.05 s,傳統(tǒng)PI控制的轉(zhuǎn)速恢復(fù)時(shí)間為0.063 s,超螺旋滑模MRAS觀測(cè)器控制的轉(zhuǎn)速恢復(fù)時(shí)間為0.054 s,結(jié)果表明復(fù)合控制中的超螺旋滑模擾動(dòng)觀測(cè)器可以明顯提高系統(tǒng)的抗干擾能力。從圖8分析3種控制策略的穩(wěn)態(tài)性能,當(dāng)電機(jī)穩(wěn)定工作時(shí),根據(jù)表2分析3種控制策略的轉(zhuǎn)速估計(jì)誤差和轉(zhuǎn)速平穩(wěn)度,其中復(fù)合控制轉(zhuǎn)速估計(jì)誤差最小,為0.1 r/min,且轉(zhuǎn)速曲線平穩(wěn)光滑,結(jié)果表明了復(fù)合控制提高了電機(jī)轉(zhuǎn)速的動(dòng)態(tài)穩(wěn)定性和系統(tǒng)魯棒性。
從圖9分析可知,當(dāng)電機(jī)處于穩(wěn)定狀態(tài)時(shí),超螺旋滑模MRAS觀測(cè)器的系統(tǒng)具有滑模控制的優(yōu)良特性,沒有明顯的抖振,同時(shí)也具有3種控制策略中穩(wěn)定的輸出轉(zhuǎn)矩;超螺旋滑模擾動(dòng)觀測(cè)器的復(fù)合控制具有最好的動(dòng)態(tài)穩(wěn)定性。根據(jù)表2分析3種控制策略的轉(zhuǎn)矩恢復(fù)時(shí)間、穩(wěn)態(tài)下的轉(zhuǎn)矩超調(diào)量和轉(zhuǎn)矩平穩(wěn)度。其中復(fù)合控制的轉(zhuǎn)矩恢復(fù)時(shí)間最短(0.012 s),傳統(tǒng)PI控制的轉(zhuǎn)矩恢復(fù)時(shí)間最長(zhǎng)(0.03 s),并且對(duì)負(fù)載干擾響應(yīng)的靈敏性一般;單一超螺旋滑模MRAS觀測(cè)器對(duì)負(fù)載干擾響應(yīng)的靈敏性略高于傳統(tǒng)PI的,但都遠(yuǎn)低于加入超螺旋滑模擾動(dòng)觀測(cè)器復(fù)合控制策略的。
根據(jù)表2可知,當(dāng)電機(jī)穩(wěn)態(tài)時(shí),3種控制策略中復(fù)合控制的轉(zhuǎn)矩超調(diào)量最低(0.017 N·m),且轉(zhuǎn)矩曲線平穩(wěn)光滑;超螺旋滑模MRAS觀測(cè)器控制的轉(zhuǎn)矩超調(diào)量為0.025 N·m;傳統(tǒng)PI控制的轉(zhuǎn)矩超調(diào)量最大(0.20 N·m),且轉(zhuǎn)矩曲線波動(dòng)較大。結(jié)果表明,加入了超螺旋滑模擾動(dòng)觀測(cè)器的復(fù)合控制提高了電機(jī)轉(zhuǎn)矩的動(dòng)態(tài)穩(wěn)定性和系統(tǒng)魯棒性,并具有良好的轉(zhuǎn)矩跟蹤性。
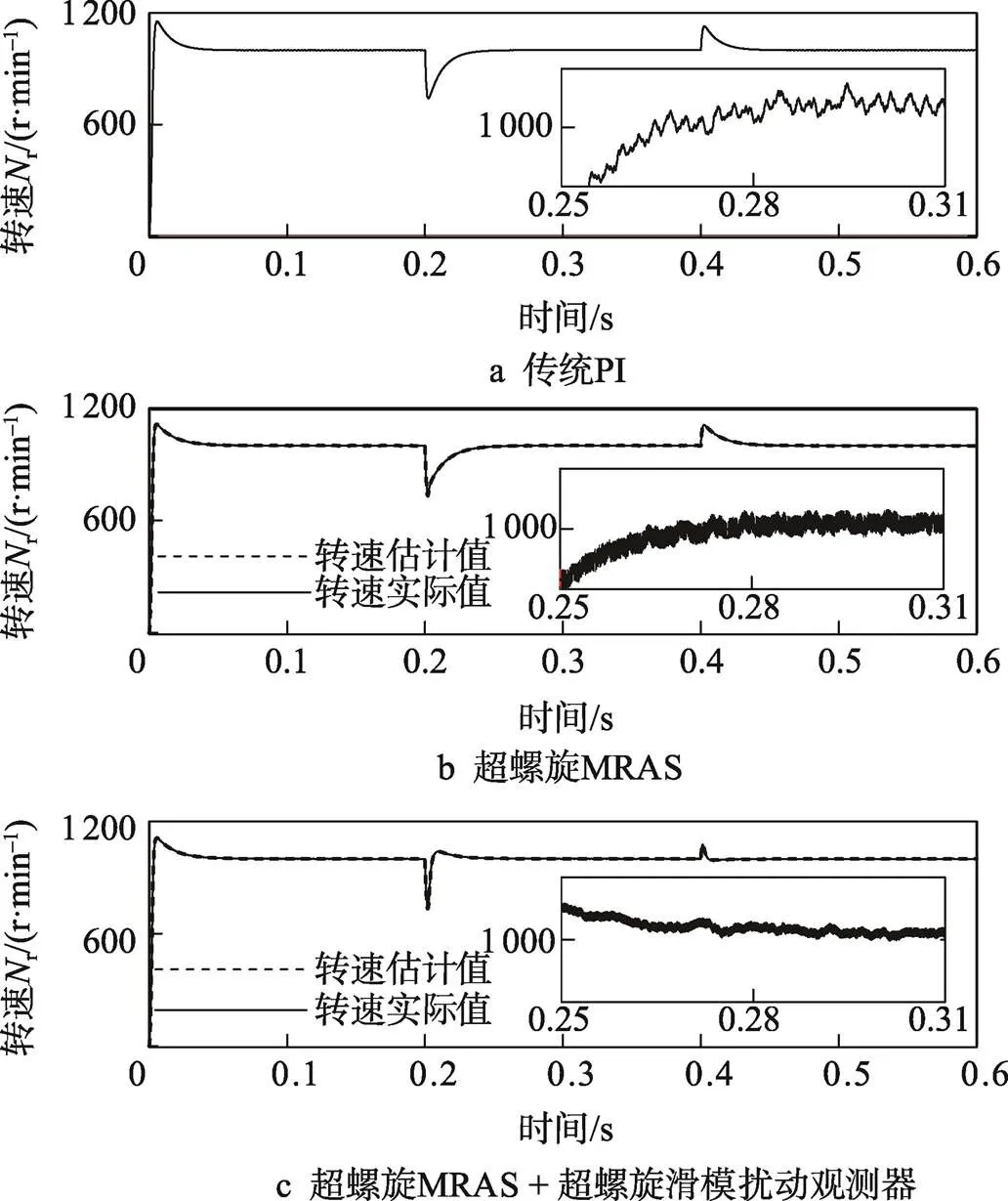
圖8 3種控制策略下的轉(zhuǎn)速結(jié)果
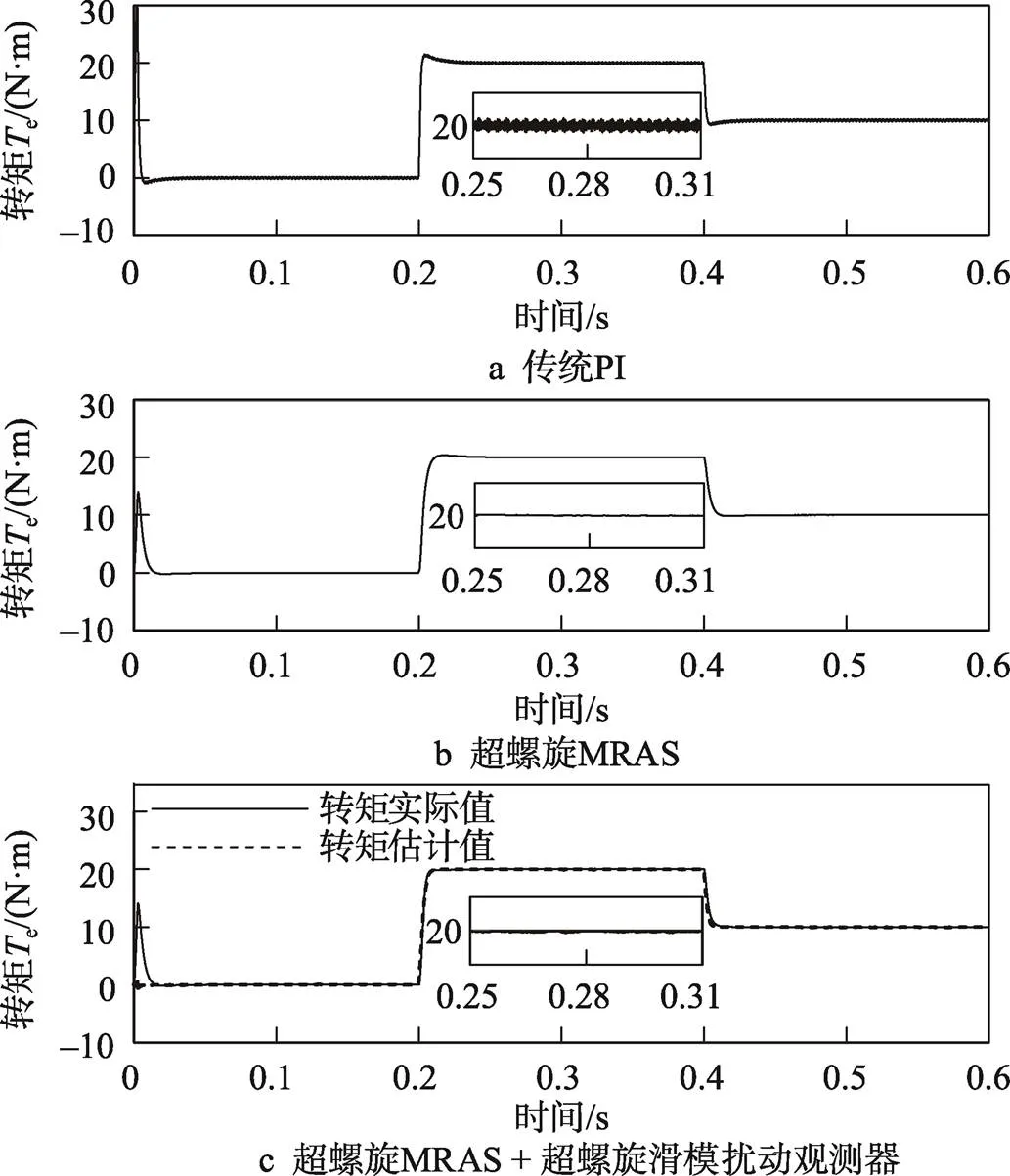
圖9 3種控制策略下的轉(zhuǎn)矩結(jié)果
表2 3種控制策略的結(jié)果對(duì)比
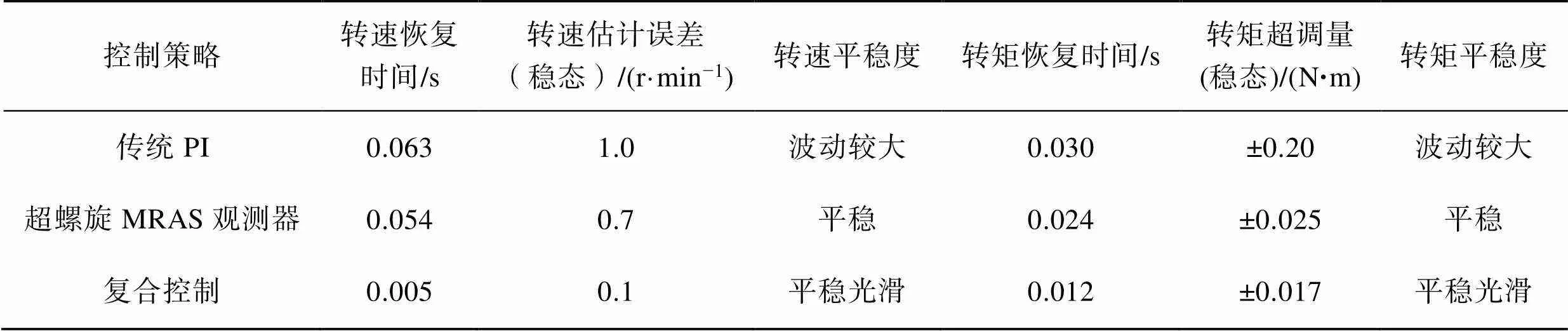
Tab.2 Comparisons of results under three control strategies
5 結(jié)語(yǔ)
PMSM在工作中容易受到外部和內(nèi)部擾動(dòng)的影響,使得系統(tǒng)呈現(xiàn)魯棒性低,抗干擾能力弱,針對(duì)以上問題,文中提出超螺旋滑模MRAS觀測(cè)器和超螺旋滑模擾動(dòng)觀測(cè)器二者復(fù)合控制的策略。仿真實(shí)驗(yàn)結(jié)果表明,當(dāng)受到擾動(dòng)時(shí)復(fù)合控制策略對(duì)電機(jī)的參數(shù)敏感度最高,這極大地提高了系統(tǒng)的動(dòng)態(tài)穩(wěn)定性和魯棒性,有利于無(wú)傳感器控制下對(duì)電機(jī)參數(shù)的預(yù)測(cè),使得系統(tǒng)在受到頻繁干擾的情況下仍然可以保持良好的工作能力。下一步工作將超螺旋控制策略進(jìn)行實(shí)際的應(yīng)用,在實(shí)際工作情況中找尋不足,進(jìn)行完善。
[1] 何瑞. 電機(jī)無(wú)速度傳感器控制技術(shù)在包裝生產(chǎn)線中的應(yīng)用[J]. 包裝工程, 2022, 43(7): 233-237.
HE Rui. Application of Motor Speed Sensorless Control Technology in Packaging Production Line[J]. Packaging Engineering, 2022, 43(7): 233-237.
[2] 金愛娟, 項(xiàng)碩, 李少龍. 永磁同步電機(jī)全速范圍內(nèi)無(wú)傳感控制策略研究[J]. 包裝工程, 2020, 41(17): 171-181.
JIN Ai-juan, XIANG Shuo, LI Shao-long. Sensorless Control Strategy of PMSM in Full Speed Range[J]. Packaging Engineering, 2020, 41(17): 171-181.
[3] 薛建峰, 王景芹, 楊昭. 多感應(yīng)電機(jī)相鄰交叉耦合快速終端滑模同步控制[J]. 包裝工程, 2017, 38(7): 173-177.
XUE Jian-feng, WANG Jing-qin, YANG Zhao. Synchronous Control of Adjacent Cross Coupling Fast Terminal Sliding-Mode Control for Multi Induction Motor[J]. Packaging Engineering, 2017, 38(7): 173-177.
[4] 繆仲翠, 王志浩, 李東亮, 等. 基于FOSM-MRAS觀測(cè)器的永磁同步電機(jī)MPTC系統(tǒng)[J]. 電機(jī)與控制學(xué)報(bào), 2020, 24(4): 121-130.
MIAO Zhong-cui, WANG Zhi-hao, LI Dong-liang, et al. Permanent Magnet Synchronous Motor MPTC System Based on FOSM-MRAS Observer[J]. Electric Machines and Control, 2020, 24(4): 121-130.
[5] 金愛娟, 尹晨濱, 李少龍, 等. 包裝機(jī)驅(qū)動(dòng)控制系統(tǒng)中諧波噪聲信號(hào)抑制策略[J]. 包裝工程, 2022, 43(3): 234-243.
JIN Ai-juan, YIN Chen-bin, LI Shao-long, et al. Suppression Strategy of Harmonic Noise Signals Contained in Packaging Machine Drive Control System[J]. Packaging Engineering, 2022, 43(3): 234-243.
[6] WOLDEGIORGIS A T, GE Xing Lai, WANG Hui Min et al. A New Frequency Adaptive Second-Order Disturbance Observer for Sensorless Vector Control of Interior Permanent Magnet Synchronous Motor[J]. IEEE Transactions on Industrial Electronics, 2021, 68(12): 11847-11857.
[7] 毛亮亮. 電動(dòng)汽車永磁同步電機(jī)電流分段優(yōu)化控制策略研究[D]. 哈爾濱: 哈爾濱理工大學(xué), 2016: 25-45.
MAO Liang-liang. Research on Current Subsection Optimization Control Strategy of Permanent Magnet Synchronous Motor for Electric Vehicle[D]. Harbin: Harbin University of Science and Technology, 2016: 25-45.
[8] 孫愷英. 永磁同步電機(jī)無(wú)速度傳感器狀態(tài)估計(jì)及控制策略研究[D]. 天津: 天津大學(xué), 2019: 15-35.
SUN Kai-ying. A Research on State Estimation of Speed Sensorless and Control Strategy for Permanent Magnet Synchronous Motor[D]. Tianjin: Tianjin University, 2019: 15-35.
[9] LEE K, HAN Y S. Reactive-Power-Based Robust MTPA Control for v/f Scalar-Controlled Induction Motor Drives[J]. IEEE Transactions on Industrial Electronics, 2022, 69(1): 169-178.
[10] LEE W, KIM J, JANG P. On-Line MTPA Control Method for Synchronous Reluctance Motor[J]. IEEE Transactions on Industry Applications, 2022, 58(1): 356-364.
[11] NGUYEN T H, NGUYEN T T, NGUYEN V Q, et al. An Adaptive Sliding-Mode Controller With a Modified Reduced-Order Proportional Integral Observer for Speed Regulation of a Permanent Magnet Synchronous Motor[J]. IEEE Transactions on Industrial Electronics, 2022, 69(7): 7181-7191.
[12] 閔磊. 基于超螺旋滑模MRAS的PMSM無(wú)位置傳感器控制方法[D]. 青島: 青島大學(xué), 2021: 30-50.
MIN Lei. Sensorless Control Method of PMSM Based on Super Spiral Sliding Mode MRAS[D]. Qingdao: Qingdao University, 2021: 30-50.
[13] 方馨. 壓電驅(qū)動(dòng)式FTS的跟蹤控制策略研究[D]. 沈陽(yáng): 沈陽(yáng)工業(yè)大學(xué), 2020: 35-45.
FANG Xin. Research on Tracking Control Strategy of Piezoelectric Driven FTS[D]. Shenyang: Shenyang University of Technology, 2020: 35-45.
[14] 李濤. 采用擴(kuò)展滑模觀測(cè)器的數(shù)控機(jī)床永磁同步電機(jī)魯棒控制方法[J]. 制造技術(shù)與機(jī)床, 2022(5): 152-158.
Li Tao. Robust Control Method for Permanent Magnet Synchronous Motor for NC Machine Tool Using Extended Sliding Mode Observer[J]. Manufacturing Technology & Machine Tool, 2022(5): 152-158.
[15] SONG Jun-zheng, WEI Xing, NIU Yu-gang. Self- Triggered Sliding Mode Control for Networked PMSM Speed Regulation System: A PSO-Optimized Super-Twisting Algorithm[J]. IEEE Transactions on Industrial Electronics, 2022, 69(1): 763-773.
[16] 周華偉, 于曉東, 高猛虎, 等. 基于不匹配干擾觀測(cè)器的圓筒型永磁直線電機(jī)新型滑模速度控制[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2018, 38(7): 2163-2170.
ZHOU Hua-wei, YU Xiao-dong, GAO Meng-hu, et al. Novel Sliding Mode Speed Control for Tubular Permanent Magnet Linear Motors Based on Mismatched Disturbance Observers[J]. Proceedings of the CSEE, 2018, 38(7): 2163-2170.
[17] 陳玄. 基于滑模擾動(dòng)觀測(cè)器的永磁同步電機(jī)控制[D]. 株洲: 湖南工業(yè)大學(xué), 2021: 20-27.
CHEN Xuan. Control of Permanent Magnet Synchronous Motor Based on Sliding Mode Disturbance Observer[D].Zhuzhou: Hunan University of Technology, 2021: 20-27.
[18] LI Ke, WANG Yi. Maximum Torque per Ampere (MTPA) Control for IPMSM Drives Using Signal Injection and an MTPA Control Law[J]. IEEE Transactions on Industrial Informatics, 2019, 15(10): 5588-5598.
[19] 顏漸德, 王輝, 蘭永紅, 等. 基于干擾觀測(cè)器的永磁同步電動(dòng)機(jī)滑模控制[J]. 微特電機(jī), 2019, 47(1): 70-73.
YAN Jian-de, WANG Hui, LAN Yong-hong, et al. Disturbance Observer-Based Sliding Mode Control for Permanent-Magnet Synchronous Motor[J]. Small & Special Electrical Machines, 2019, 47(1): 70-73.
[20] 劉旭東, 李珂, 張奇, 等. 基于非線性擾動(dòng)觀測(cè)器的永磁同步電機(jī)單環(huán)預(yù)測(cè)控制[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2018, 38(7): 2153-2162.
LIU Xu-dong, LI Ke, ZHANG Qi, et al. Single-Loop Predictive Control of PMSM Based on Nonlinear Disturbance Observers[J]. Proceedings of the CSEE, 2018, 38(7): 2153-2162.
Sensorless Anti-disturbance Control Strategy of Permanent Magnet Synchronous Motor Based on Super-twisting Sliding Mode Disturbance Observer
HAN Kun, ZHANG Chang-Zheng, YUAN Lei
(Hubei University of Technology, Wuhan 430000, China)
The work aims to improve the working accuracy of automation equipment in the packaging industry, optimize the stability of the sensorless control system of the traditional permanent magnet synchronous motor, and improve the system robustness and anti-disturbance performance when the motor encounters internal and external disturbances. A super-twisting sliding mode was introduced to design a super-twisting sliding mode MRAS observer to improve the stability of the system. Simultaneously, according to the good dynamic tracking performance of the sliding mode disturbance observer for the motor, the super-twisting sliding mode algorithm was used to optimize its performance. Besides, a combined control strategy of a super-twisting sliding mode MRAS observer and a super-twisting sliding mode disturbance observer for permanent magnet synchronous motors was proposed. This scheme effectively reduced the speed estimation error when the motor encountered disturbances, and the error fluctuated around 0.8 r/min, which significantly improved the response speed of the motor control system after encountering disturbances. The experimental simulation is carried out in MATLAB/SIMULINK, and the results verify that the control strategy proposed not only improves the robustness and tracking accuracy of the system, but also strengthens the anti-interference ability of the system.
permanent magnet synchronous motor; super-twisting sliding mode; model reference adaptive system; sliding mode disturbance observer; dynamic tracking
TM351
A
1001-3563(2023)03-0139-09
10.19554/j.cnki.1001-3563.2023.03.017
2022?07?31
國(guó)家自然科學(xué)基金(51507188);國(guó)防科技重點(diǎn)實(shí)驗(yàn)室基金(6142217210301);湖北工業(yè)大學(xué)博士科研啟動(dòng)基金(XJ2021000302)
韓琨(1999—),男,碩士生,主攻永磁同步電機(jī)控制方向。
張長(zhǎng)征(1978—),男,博士,副教授,主要研究方向?yàn)殡娔苜|(zhì)量與可再生能源發(fā)電系統(tǒng);袁雷(1984—),男,博士,講師,主要研究方向?yàn)殡娏﹄娮优c電力傳動(dòng)。
責(zé)任編輯:曾鈺嬋
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
