
基于STM 32的電動6-DOF加載系統(tǒng)設計*
2023-02-24 05:19:38廖連杰郭聯(lián)龍蔣路明
機電工程技術 2023年1期
廖連杰,桑 勇,郭聯(lián)龍,蔣路明
(大連理工大學機械工程學院,遼寧大連 116024)
0 引言
并聯(lián)機器人也叫做并聯(lián)機構,其特點是在基座和末端執(zhí)行器之間至少存在兩個運動鏈。可以進行縱移、橫移、升降、滾轉(zhuǎn)、俯仰、偏航運動的六自由度并聯(lián)機構被稱為6-DOF并聯(lián)平臺,該類平臺擁有結構強度高、精度高、響應速度快等優(yōu)勢,是運動模擬、精密對接、醫(yī)療手術等設備[1-3]的關鍵組成部分,廣泛應用于工業(yè)與生活當中。
位移、力加載實驗在工程中十分常見,比如研究材料壓縮特性時,常用單自由度位移、力拉壓實驗機來進行壓縮試驗[4];研究土的強度和本構特性時,常用動靜三軸實驗儀進行單自由度的位移、力加載測試[5]。單自由度加載設備應用已經(jīng)很廣泛,近年來一些學者對多自由度加載設備進行了研究,許國山等[6]研究了電液伺服三自由度加載系統(tǒng)的考慮幾何非線性的控制方法,但是針對一些需要進行高精度多自由度的位移、力加載的場合,目前大部分設備難以實現(xiàn)。
6-DOF并聯(lián)平臺能完成復雜的多自由度組合運動[7-8],另外機電伺服系統(tǒng)具有結構緊湊、響應快、節(jié)能環(huán)保、精度高等特點[9-10],綜合以上兩點本文研制了基于Stewart平臺構型的電動6-DOF加載系統(tǒng),它能實現(xiàn)多自由度高精度位移、力加載功能。本文首先介紹加載系統(tǒng)的體系結構,詳細闡述各系統(tǒng)硬件之間的關系,之后建立了加載系統(tǒng)的逆運動學數(shù)學模型。針對加載裝置實現(xiàn)力控功能的難點問題,提出了基于位移環(huán)的閉環(huán)力控的解決方案。最后設計多自由度加載實驗,測試了6-DOF加載系統(tǒng)。
1 電動6-DOF加載系統(tǒng)的體系結構
電動6-DOF加載裝置、控制柜和上位機組成加載系統(tǒng)的體系結構,體系結構的核心是基于Stewart平臺構型的電動6-DOF加載裝置。如圖1所示,加載裝置由固定平臺2、上下球鉸3、伺服電機4、電缸5、稱重傳感器6、動平臺7、高精度六維力傳感器8以及其他連接件組成。加載裝置在地面組裝完成后,固定平臺2與固定架1之間用高強度螺釘連接,使得整個加載裝置呈現(xiàn)倒掛姿態(tài)。系統(tǒng)加載時伺服電機4旋轉(zhuǎn)帶動電缸5伸縮,同時上下球鉸3同步旋轉(zhuǎn),從而改變動平臺7的位姿(位置和姿態(tài))。本文自主開發(fā)的加載系統(tǒng)控制程序運行在工控機13上,工控機通過高速網(wǎng)線12連接到控制柜,控制柜存放除加載裝置和上位機以外的所有配件,包括伺服驅(qū)動器9、六維力放大器10以及STM32控制器11。控制柜側(cè)面留有一個孔,加載系統(tǒng)的所有接線都接入該孔,這使得現(xiàn)場布置整潔有序。
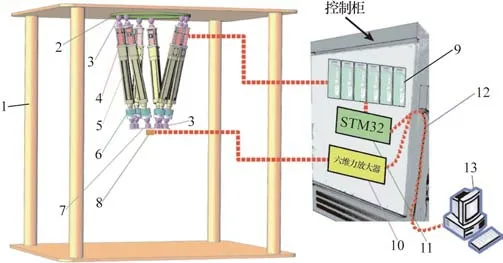
圖1 加載系統(tǒng)的硬件組成
從圖1可以看出加載系統(tǒng)各硬件之間的關系。用戶在上位機中輸入加載指令,隨后上位機發(fā)送數(shù)據(jù)給STM32控制器。控制器有兩個功能:一是產(chǎn)生指定的PWM脈沖;二是通過TCP協(xié)議與上位機通信。除此之外控制器不進行任何其他操作,確保系統(tǒng)能夠穩(wěn)定運行。伺服驅(qū)動器解析控制器產(chǎn)生的PWM脈沖后,驅(qū)動伺服電機旋轉(zhuǎn),從而改變動平臺位姿。
此外,高精度六維力傳感器安裝在動平臺的中心,將動平臺所受六維力轉(zhuǎn)化為電信號,隨后由六維力放大器采集、放大電信號,通過UDP協(xié)議將六維力信息傳送至上位機。工控機有兩個網(wǎng)線口,一個網(wǎng)口控制STM32控制器產(chǎn)生脈沖,另一個網(wǎng)口接收六維力信息,兩網(wǎng)口同時工作時互不干擾。
2 加載系統(tǒng)的數(shù)學模型和控制體系
根據(jù)控制系統(tǒng)的設計步驟,在完成完電動6-DOF加載系統(tǒng)的搭建后需要建立系統(tǒng)輸入與輸出之間的關系,為此本文對加載系統(tǒng)的逆運動學數(shù)學模型進行了建立,并完成了位移加載和力控加載的控制體系設計。
2.1 加載系統(tǒng)的數(shù)學模型建立
逆運動學對加載系統(tǒng)的作業(yè)軌跡規(guī)劃和軌跡跟蹤控制具有重要意義,為研究動平臺的位姿與伺服電缸伸縮量之間的數(shù)學關系,需要建立加載系統(tǒng)的逆運動學數(shù)學模型,該模型映射了動平臺的位姿和各軸長度之間的關系[11]。在建模中作以下規(guī)定。
(1)坐標系規(guī)定:分別以動平臺中心A0和固定平臺中心B0為坐標系原點,建立右手規(guī)則的動坐標系{A}和靜坐標系{B},如圖2所示。
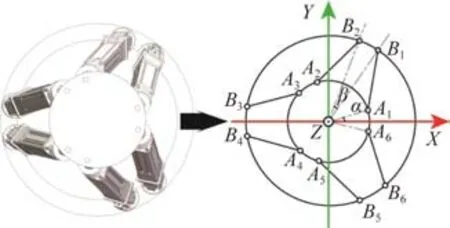
圖2 加載裝置的俯視圖
(2)軸編號規(guī)定:A1~A6是動平臺上各球鉸的旋轉(zhuǎn)中心,B1~B6是固定平臺上各球鉸的旋轉(zhuǎn)中心,A i B i表示加載系統(tǒng)的第i根軸。
(3)空間位姿規(guī)定:p=[φθψx y z]T為動平臺的位姿,φ、θ、ψ被稱之為橫滾自由度、俯仰自由度和偏航自由度,x、y、z被稱之為縱移自由度、平移自由度、升降自由度,動平臺初始位姿為[0 0 0 0 0 0]T,初始位姿時動平臺與固定平臺之間的高度用常量h表示。
上述加載系統(tǒng)是基于Stewart平臺構型建立,6根軸的逆運動學數(shù)學模型相同,為了圖示簡潔,本文只畫出第6根軸的逆運動學數(shù)學模型,如圖3所示。圖中B w6為6個動平臺球鉸旋轉(zhuǎn)中心在{B}系下的坐標,B l6為第6根軸在{B}系下的矢量表示,B q6為6個固定平臺球鉸旋轉(zhuǎn)中心在{B}系下的坐標。由于各矢量都是在靜系{B}下的表示,根據(jù)同一坐標系內(nèi)矢量的疊加原理,可得出:

圖3 加載系統(tǒng)第6根軸的逆運動學數(shù)學模型
式中的角標B代表相關矢量是在{B}下的表示。動平臺的各球鉸中心在{A}下的表示是不變的,通過坐標變換,{A}下的向量能夠在{B}下表示出來。本文采用Z-Y-X歐拉角變換[12]表示動平臺的姿態(tài),其中涉及的旋轉(zhuǎn)轉(zhuǎn)換矩陣具體表達為:
式中:Rot(φ,θ,ψ)表示{A}繞著{A}的Z軸旋轉(zhuǎn)ψ,再繞新Y軸旋轉(zhuǎn)θ,最后繞新X軸旋轉(zhuǎn)φ的變換過程。
動平臺和固定平臺之間的位置關系中心的位置關系表示為pt=[x y(z+h)]T。根據(jù)Z-Y-X歐拉角變換,將{A}下的A w6變換到{B}下,得到:
結合式(1)、(3)得到第6根軸的逆運動學數(shù)學模型:
同理,從單根軸推廣到6根軸,可以寫出整個加載裝置的逆運動學數(shù)學模型。B L為6根軸的矢量表示,A W為動平臺上6個球鉸中心坐標,B X為平移矩陣,B Q為固定平臺上6個球鉸中心坐標,整個加載裝置的逆運動學數(shù)學模型為:
假設各軸的初始長度為l0i(i=1,2,…,6),最終各伺服電缸伸縮量Δl i表示為:
2.2 加載系統(tǒng)的控制體系設計
本文設計了加載系統(tǒng)的位移控制系統(tǒng),能夠?qū)崿F(xiàn)位移加載控制,其原理如圖4所示。
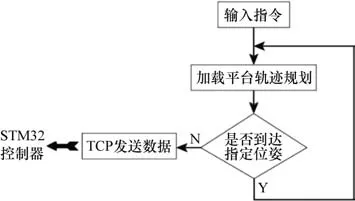
圖4 位移控制系統(tǒng)的原理
如圖5所示,輸入的位移加載指令可以是6個自由度的任意組合,用戶在上位機中輸入位移加載指令后,加載系統(tǒng)控制程序便規(guī)劃動平臺的運行軌跡,然后將運行軌跡分成n小段。上位機將n小段數(shù)據(jù)逐次發(fā)送給STM32控制器,之后控制器產(chǎn)生PWM脈沖。為了觀察位移控制系統(tǒng)的PWM脈沖分布是否均勻,本文使用示波器在伺服驅(qū)動器的PWM信號接收端進行測試。圖5顯示動平臺進行勻速位移加載時軸6的伺服驅(qū)動器接收到的PWM脈沖信號,圖中每兩個脈沖對應一小段運行軌跡,脈沖分布十分均勻,從而驗證了上述的位移控制系統(tǒng)。
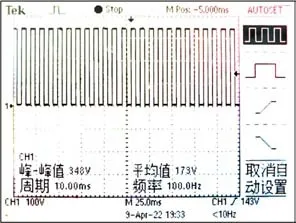
圖5 軸6伺服驅(qū)動器接收的PWM信號
本文提出基于位移環(huán)的閉環(huán)力控加載方案,能夠?qū)崿F(xiàn)動平臺沿某個空間方位的動態(tài)力加載。力控加載的流程如圖6所示。用戶輸入力加載指令Fi(t)時,加載系統(tǒng)的控制程序首先實時比較Fi(t)和Fu(t),F(xiàn)u(t)為高精度六維力傳感器測出的六維力數(shù)值,然后控制程序?qū)⒘Φ钠盍喀(t)通過模糊PID控制器轉(zhuǎn)化為位移ΔS(t)。ΔS(t)作為位移控制系統(tǒng)的輸入指令,使得動平臺輸出一定位移,這位移使得Fu(t)更加趨近于Fi(t),從而降低了力的偏差。

圖6 閉環(huán)力控的流程
3 多自由度加載實驗
電動6-DOF加載系統(tǒng)能夠?qū)崿F(xiàn)多自由度的位移、力加載,加載方案組合眾多,為了實驗方便本文以YZ軸為代表進行了位移階躍加載,以Z軸為代表進行了位移三角波加載,以Z軸為代表進行了力正弦加載和力正弦加載,軸的規(guī)定和實驗裝置如圖7所示。
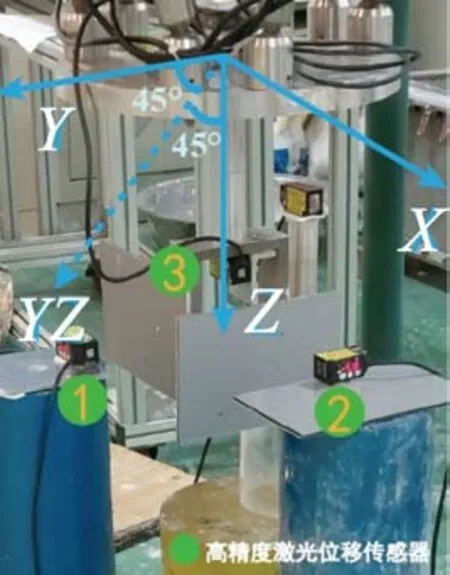
圖7 多自由度加載的實驗裝置
為了得到動平臺的運動位移,在X、Y、Z每一個方向都安裝了一個高精度激光位移傳感器;為了得到動平臺中心受到的六維力,在動平臺底部中心位置安裝了高精度六維力傳感器。
3.1 位移控加載
動平臺在工作空間的中心時有最大的位移加載范圍,故控制動平臺下降100 mm到p=[0 0 0 0 0 100]T處,在此位置進行YZ軸的位移階躍加載,加載的位移大小為30 2 mm,加載速度分別為1 mm/s、2 mm/s、5 mm/s。YZ軸的實驗結果如圖8所示。從圖中的實驗結果來看,加載系統(tǒng)完成了Y、Z軸的階躍加載,Y和Z兩個方向都加載了30 mm左右的位移,通過計算得到Y、Z軸的穩(wěn)態(tài)加載誤差分別小于0.25%和0.20%。
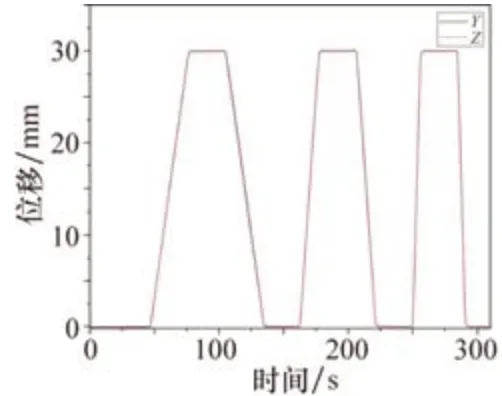
圖8 YZ軸的位移階躍加載
另外還進行了3組不同幅值不同頻率的X軸的位移三角波加載,第1組幅值為5 mm,頻率為0.004 Hz;第2組幅值為5 mm,頻率為0.02 Hz;第3組幅值為30 mm,頻率為0.004 Hz。X軸的實際位移波形如圖9所示。從圖中的實驗結果來看,加載系統(tǒng)實現(xiàn)了不同頻率、幅值的X軸三角波加載,3組實驗的誤差小于0.49%。
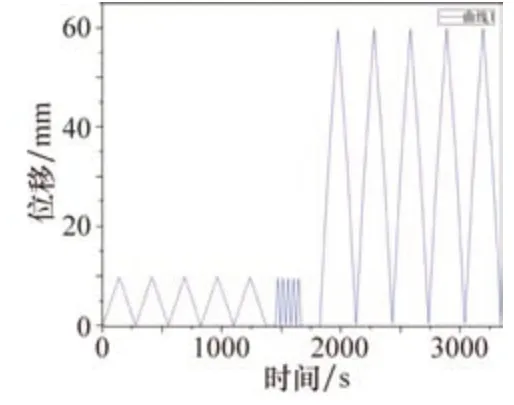
圖9 X軸的位移三角波加載
由以上位移控加載的實驗結果知:電動6-DOF加載系統(tǒng)能夠?qū)崿F(xiàn)多自由度的高精度位移加載。
3.2 力控加載
加載系統(tǒng)的閉環(huán)力控方案基于位移環(huán),前文通過實驗已經(jīng)驗證了多自由度的高精度位移加載功能,為此驗證單自由度的高精度力加載功能,間接證明多自由度的高精度力加載功能。以Z軸為代表進行了力正弦加載,實驗結果如圖10所示。圖中的曲線1為理論力,曲線2為實際加載力,不難發(fā)現(xiàn)每次加載出現(xiàn)一個波峰之后,曲線2都能很快趨近曲線1,而且穩(wěn)定時實際加載力的偏差控制在±0.5 N以內(nèi)。
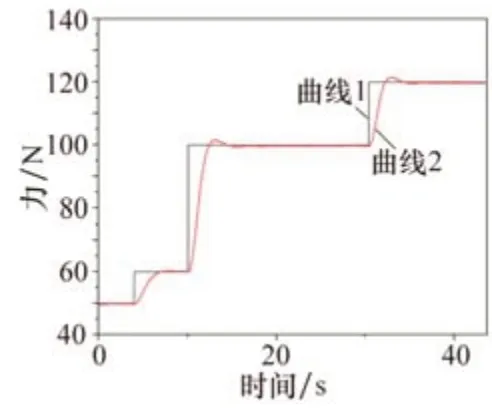
圖10Z軸的力位移加載
另外進行了3組不同幅值不同頻率的Z軸的正弦加載,第1組幅值為80 N,頻率為0.02 Hz;第2組幅值為50 N,頻率為0.05 Hz;第3組幅值為10 N,頻率為0.1 Hz,實驗結果如圖11所示。圖示結果表明力正弦加載具有平滑的波形,3組實驗的最大誤差小于2.3%。
由以上力控加載的實驗結果知:電動6-DOF加載系統(tǒng)同樣能夠?qū)崿F(xiàn)多自由度的高精度力加載。
4 結束語
本文基于STM32研制了電動6-DOF加載系統(tǒng),該加載系統(tǒng)實現(xiàn)了高精度的位移、力加載,其中力加載一直是Stewart平臺構型加載系統(tǒng)的難點問題。本文詳細介紹了6-DOF加載系統(tǒng)的體系結構,以及各硬件之間的關系,然后采用Z-Y-X歐拉角方法描述加載系統(tǒng)動平臺的空間位姿,探討了動平臺的空間位姿與伺服電缸伸縮量之間的數(shù)學關系,建立了加載系統(tǒng)的逆運動學數(shù)學模型。針對加載系統(tǒng)實現(xiàn)力控功能的難點問題,提出了基于位移環(huán)的閉環(huán)力控的解決方案。最后設計了多自由度加載實驗,實驗結果表明YZ軸的位移階躍加載誤差小于0.25%,X軸的位移三角波加載誤差小于0.49%,Z軸的力正弦加載偏差控制在±0.5 N以內(nèi),Z軸的力正弦加載誤差小于2.3%,客觀的實驗結果驗證了加載系統(tǒng)的多自由度高精度位移、力加載功能。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業(yè)設計(2022年8期)2022-09-09 07:43:20
中學生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
