
基于三軸運動模組的具有避障和等待位的運動控制方法
2023-02-24 05:20:46賀長林徐其航
機電工程技術 2023年1期
關鍵詞:效率
賀長林,殷 杰,徐其航
(1.中電鵬程智能裝備有限公司,南京 210008;2.邵東智能制造技術研究院有限公司,湖南邵陽 422213;3.揭陽職業技術學院 機電工程系,廣東揭陽 522051)
0 引言
隨著工廠人力成本的增加,生產自動化成為了一個不可逆的趨勢。在自動化裝配生產線上,取料、避障、放料等是非常常見的應用場景。在實現具有取料、放料,以及避障等動作的運動控制中,如果對成本沒有要求的,一般采用機器人來實現[1-3]。采用機器人的解決方案,方案簡單,操作方便,只需要按照固定的軌跡點進行示教,機器人內部會自動生成相應的運動軌跡,而且機器人具有自動平滑運動軌跡功能,所以機器人在避障點附近可以平滑地經過避障點,通過采用平滑功能,可以大大提升效率;但是由于機器人對安裝的空間要求比較大,所以才有機器人方案,設備的體積會變大,另一方面,由于機器人在箱取料位或者放料位運動時,沒有改變目標位置的功能,機器人只能按照既定的軌跡,固定的速度曲線來運動,所以需要在取料等待位或者放料等待位做減速運動并停止,然后才能去取料或者放料,這樣不利于提升效率。如果對成本比較敏感,一般會采用三軸的機械手來實現,采用三軸機械手,由于在取料位和放料位分別有等待位,在這兩個點有停頓,會有相應的加減速,從而影響效率[4-6];由于存在避障點,所以三軸機械手不能做到三軸聯動,導致采用三軸機械手的效率更慢[7-9]。采用本文技術方案,可以讓三軸機械手高效地實現取料和放料的動作,能實現像機器人的運動軌跡平滑功能,和機器人的解決方案相比,該技術方案成本更低,對安裝位置要求更低,實現方法更簡單,設計的柔性更高。
1 三軸運動模組機械結構
三軸機械手如圖1所示,圖示的結構中包含了XYZ三個坐標軸,還有一個障礙物,一個取料位,既是軌跡點去取料位把標簽吸附到軌跡點上,一個放料位,既是軌跡點把從取料位吸附的標簽按照設定的軌跡運動到放料位,然后貼到放料位上。
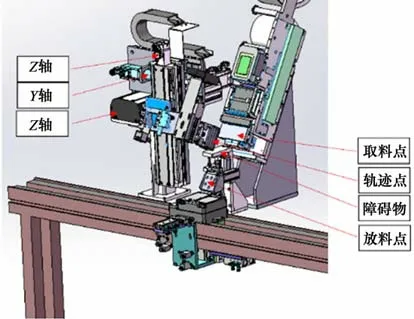
圖1 三軸機械手結構
取料時,需要達到一定的條件,料已經在取料點時,軌跡點才能去取料;同理,放料時,需要達到一定的條件,軌跡點才能允許去放料點,所以需要有一個取料等待位和放料等待位。同時由于有障礙物存在,還需要有一個避障點。由于取料點和放料點有一定的位置精度要求,所以去取料點和放料點的位置時,運動軌跡必須是直線;同時更好地取料和放料,離開取料點和放料點時,運動軌跡必須也要是直線。
本文設計的技術方案,不限于只有兩個等待位或者一個避障點,對于多個等待位和多個避障點都適用。為了方便描述本文的技術方案,采用兩個等待位和一個避障點的情況進行說明。
2 運動控制分析
2.1 三軸模組從取料位到放料位軌跡分析
如圖2和圖3所示,為軌跡點從取料位到放料位的軌跡,由于從取料點出發時,必須要走直線,所以從取料點開始運動后,只有X軸動作,Y軸和Z軸停止,當X軸運動到某一個能避開障礙物的地方,Y軸和Z軸開始動作,這種運動方式比等X軸到位后,Y軸和Z軸再開始運動,效率更高,運動時間更短;由于Y軸和Z軸開始動作是根據X軸運動到某一個固定的點來確定的,所以從取料點到放料等待點的軌跡是固定的,就能保證軌跡點不會碰到障礙物。當X軸到達最遠距離后,Y軸和Z軸再運行一段時間后也會停止,當Y軸和Z軸到達放料等待位后,X軸再開始向放料等待位運動,X軸的運動過程分兩種情況,在X軸往放料等待位運動過程中,如果在X軸開始減速前,放料的條件能夠達到,允許放料后,利用伺服電機的目標位置更改并且立即生效的功能,在經過放料等待位時不需要減速,直接到達放料位置;第二種情況,當X軸開始減速后,放料的條件才達到,這種情況下,X軸在放料等待位減速到0后,且放料條件達到后,X軸再開始運動到放料位置。
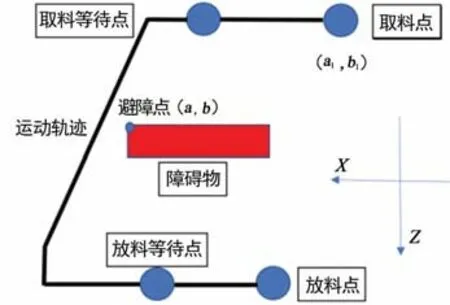
圖2 從取料點到放料點運動軌跡(a基于X-Z坐標)
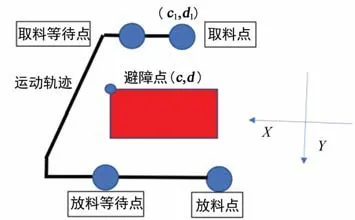
圖3 從取料點到放料點運動軌跡(b基于X-Y坐標)
2.2 去放料位Y-Z軸啟動點分析
為了能準確確定Y軸和Z軸開始運動時,X軸的坐標值,從兩個坐標系內分別計算出這個X軸坐標的最小值,然后從這兩個最小值中選一個比較大的值,即是需要計算的值。首先需要找到避障點,即是運動軌跡只需要避開這個點,就能達到避障的目的,在X-Z坐標系內,找到障礙物中X軸的最大數值,同時也找到Z軸坐標最大的數據,這兩個數值組成的坐標點就是避障點。
如圖所示,障礙物的左上角即是要找的避障點,根據這個可以計算出在X-Z坐標系內的Y軸和Z軸開始動作X軸的坐標X1,X1≥a-v2×(T1+2×(b1-b))/2v1,其中v2為X軸最高速度,T1為Z軸加速時間,v1為Z軸最高速度,而且假定X軸和Z軸的加速時間比運動時間要短很多;同理也可以計算出基于X-Y軸坐標系內Y軸和Z軸開始動作X軸的坐標X2,X2≥c-v2×(T1+2×(d1-d))/2v1,其中v2為X軸最高速度,T1為Z軸加速時間,v1為Z軸最高速度。如果X1>X2,X1就是需要的X軸坐標值;如果X1<X2,X2就是需要的X坐標值。
2.3 從取料位到放料位速度分析
從取料點到放料點,Y軸和Z軸都只是從取料等待位到放料等待位,只有兩個位置點,而且從放料點開始運動之后的一段時間內,以及軌跡點從放料等待位到放料運動過程中,這兩個節點,Y軸和Z軸都必須是靜止的,所以不論放料條件是否及時成立,Y軸和Z軸的速度曲線都是一樣的,所以不討論Y軸和Z軸的速度曲線,只討論X軸速度曲線。由圖4可以看到,當放料條件沒有及時滿足時,X軸會多一次加減速過程,這時速度曲線和傳統的三軸模組控制方案的速度曲線是一致的,當放料條件及時滿足時,X軸會減少一次加減速過程,這樣就可以提升運動效率。

圖4 X軸從取料點到放料點速度曲線
當放料條件能及時達到,軌跡點能平滑地從取料位運動到放料位,大大提升運動效率,減少運動節拍時間,同時還能減少運動機構加減速次數,減少運動機構由于加減速帶來的磨損;且不會和障礙物干涉。
當放料條件沒有能及時達到,軌跡點會在放料等待位進行等待,不會直接去放料等待位,利用伺服電機的目標位置連續更改且立即生效的功能[10-11],可以實現兩種情況都能達到使用要求。
2.4 三軸模組從放料位回取料位軌跡分析
如圖5和圖6所示,軌跡點從放料點返回取料點,由于從放料點出發時,必須要走直線,所以從放料點開始運動后,只有X軸動作,Y軸和Z軸停止,當X軸運動到某一個能避開障礙物的地方,Y軸和Z軸開始動作,這種運動方式,比等X軸到位后,Y軸和Z軸再開始運動,這樣的效率更高,運動時間更短;由于Y軸和Z軸開始動作是根據X軸運動到某一個固定的點來確定的,所以從放料點到取料等待點的軌跡是固定的,就能保證軌跡點不會碰到障礙物。當X軸到達最遠距離后,Y軸和Z軸再運動一段時間后也會停止,當Y軸和Z軸到達取料等待位后,X軸再開始向取料等待位運動,X軸的運動過程分兩種情況,當X軸運動到取料等待位過程中,如果在X軸開始減速前,取料的條件能夠達到,允許取料后,利用伺服電機的目標位置更改并且立即生效的功能,在經過取料等待位時不需要減速,直接到達取料位置;第二種情況,當X軸開始減速后,取料的條件才達到,這種情況下,X軸在取料等待位減速到0后,且取料條件達到后,X軸再開始運動到取料位置。
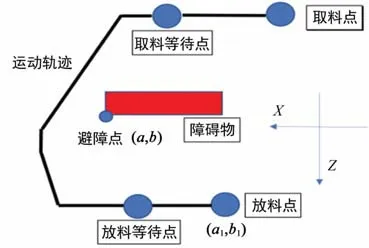
圖5 從放料點到取料點運動軌跡(a基于X-Z坐標)
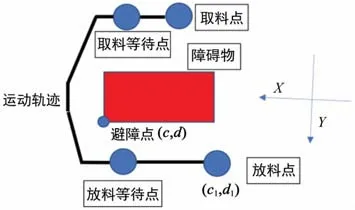
圖6 從放料點到取料點運動軌跡(b基于X-Y坐標)
回取料位Y-Z軸啟動點分析如下。
由于回取料位的軌跡和去放料位軌跡是一個類似的運動控制,根據2.2節分析原理,可以得到在X-Z坐標系內的Y軸和Z軸開始動作X軸的坐標X1,X1≥a-v2×(T1+2×(b-b1))/2v1,其中v2為X軸最高速度,T1為Z軸加速時間,v1為Z軸最高速度,而且假定X軸和Z軸的加速時間比運動時間要短很多;同理也可以計算出基于X-Y軸坐標系內Y軸和Z軸開始動作X軸的坐標X2,X2≥c-v2×(T1+2×(d-d1))/2v1,其中v2為X軸最高速度,T1為Z軸加速時間,v1為Z軸最高速度。X1和X2中比較大的那個值即為Z和Y軸開始啟動X軸的坐標。
2.5 三軸模組從放料位回取料位速度分析
從放料點回到取料點的速度分析,與從取料點到放料點的情況類似,類似的分析并結合圖7可以得到,當取料條件及時滿足時,X軸會減少一次加減速過程,這樣就可以提升運動效率。
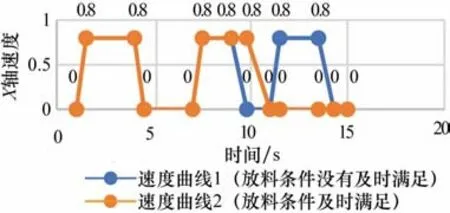
圖7 X軸從取料點到放料點速度曲線
當取料條件能及時達到,軌跡點能平滑地從放料位運動到取料位,大大提升運動效率,減少運動節拍時間,同時還能減少運動機構加減速次數,減少運動機構由于加減速帶來的磨損;且不會和障礙物干涉。
當取料條件沒有能及時達到,軌跡點會在取料等待位進行等待,不會直接去取料等待位,利用伺服電機的目標位置連續更改且立即生效的功能,可以實現兩種情況都能達到使用要求。
從取料位到放料位的軌跡和從放料位到取料位的軌跡不一樣,取料條件有沒有及時成立,但是從取料位到放料位的軌跡都是一樣的,都是固定的,只不過,當取料條件沒有及時成立,軌跡點會在接近取料等待位進行減速,并減速到0,等取料條件成立后,再去取料。當取料條件及時成立,軌跡點不會在取料等待位進行減速,而是直接去取料。同理,當放料條件有沒有及時成立,但是從放料位到取料位的軌跡都是一樣的,當放料條件沒有及時成立,軌跡點會在接近放料等待位進行減速,并減速到0,等放料條件成立后,再去放料。當放料條件及時成立,軌跡點不會再放料等待位進行減速,而是直接去放料。
3 應用效果分析
采用本文涉及的技術方案用到電表自動裝銘牌的設備上,相比采用普通的三軸運動控制方法,可以使設備節拍從8 s減少到4.5 s,比傳統的三軸運動模組控制方法效率提升了43%。
4 結束語
本文為具有取料、放料、避障等功能的運動控制場景,提供了一種全新的解決方案。采用三軸運動控制模組的機械結構,結合本文的運動控制方法,比傳統的技術方案成本低,效率高。相比于多軸機械手,本文涉及的技術方案成本更低,更容易安裝。相比于普通的三軸機械臂運動控制方案,本文設計的技術方案能大大提升效率,能大大減少節拍時間;同時還能實現三軸聯動,且運動軌跡是固定不變的,保證軌跡點不會和障礙物干涉;面對取料和放料條件能否及時達到的多種情況時,都能按照固定的軌跡來達到設定的工藝要求;當取料條件或者時放料條件能及時達到,利用伺服電機中的設定位置實時更改,且立即生效的功能,來實現在取料等待點或者放料等待位不進行減速停止,而是高速通過等待位,直接去放料或者取料位,這樣能大大提高效率,而且還能減少伺服電機的加減速次數來減少機械沖擊。
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經濟(2017年6期)2017-07-12 09:27:16
中國衛生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(2015年7期)2015-02-28 19:02:38
電子設計工程(2015年12期)2015-02-27 12:06:10
中國衛生(2014年11期)2014-11-12 13:11:32
