基于狀態輸出反饋自適應模糊控制的導彈控制系統設計
2023-02-24 08:52:12黃睿涵段朝陽李海峰
航空兵器 2023年6期
黃睿涵, 段朝陽, 李海峰
(1.中國空空導彈研究院, 河南 洛陽 471009; 2.空基信息感知與融合全國重點實驗室, 河南 洛陽 471009)
0 引 言
隨著科學技術的不斷進步以及空戰需求的不斷提升, 各類空戰武器都朝著高空、 高速、 高隱身、 大機動的目標發展, 因此對于空空導彈的戰斗性能也有了更高的要求[1-2]。 為了解決傳統氣動舵控制的空空導彈在低動壓下機動能力差的問題, 采用直接力/氣動力復合控制的方式來提高空空導彈的響應速度, 使其能夠更精準地命中目標[3]。
對于直接力/氣動力復合控制系統來說, 傳統PID控制方法難以滿足控制系統對于導彈性能的要求[4], 因此學者開展了新控制方法的研究, 包括最優控制、 模糊控制、 滑模控制以及自抗擾控制。 文獻[5]針對空空導彈在轉彎過程中的大攻角姿態控制問題, 設計了大擾動下的混合Bang-Bang控制律, 并利用擴張狀態觀測器來修正切換線, 提高魯棒性; 文獻[6]提出拋接定向越肩發射轉彎方案, 以提高空空導彈在使用直接力裝置時的轉彎能力, 并在相平面內設計了具有離散特性的混合Bang-Bang控制系統, 該方案可使導彈轉彎時間縮短、 能量消耗降低且轉彎半徑減小; 文獻[7]建立了基于模糊控制的直接力/氣動力復合控制系統, 并使用神經網絡建立了神經模糊推理系統, 以解決模糊控制過于依賴經驗的問題; 文獻[8]針對直接力/氣動力復合控制問題, 使用滑模控制設計了氣動子系統, 以提高其魯棒性, 又利用模糊規則設計了直接力子系統, 使導彈整體性能得到了提高; 文獻[9]通過使用非奇異快速終端滑模方法和動態分配技術改善直接力/氣動力復合空空導彈的性能, 使其能快速跟蹤過載指令; 文獻[10]利用自適應高階滑模設計了虛擬控制量, 建立了二次規劃最優問題, 以分配虛擬控制量; 文獻[11]利用最優控制理論設計了基于狀態反饋的導彈俯仰通道控制回路, 并通過二次線性規劃獲得控制律, 針對直接力的干擾問題, 使用自抗擾理論構建了狀態觀測器抑制擾動; 文獻[12]基于自抗擾控制方法減小了干擾對系統穩定性的影響, 通過在彈體前段增加若干個姿控發動機, 以提高系統的指令響應速度, 采用模糊控制設計了氣動力與直接力的指令分配策略, 從而保證了導彈在較高飛行空域的快速響應能力。
本文對空空導彈俯仰通道進行建模, 并設計了三回路自動駕駛儀。 為了解決導彈在低動壓下響應較慢的問題, 設計了直接力/氣動力復合駕駛儀, 使用模糊控制對直接力部分進行開關控制, 并根據李雅普諾夫穩定性理論, 設計了基于狀態空間輸出反饋的模型參考自適應系統對復合駕駛儀進行優化。 仿真結果表明, 使用該方法后, 導彈對于跟蹤加速度指令的性能明顯提高。
1 直接力/氣動力復合導彈模型
1.1 導彈氣動布局
本文采用直接力/氣動力復合導彈氣動布局, 即導彈采用正常式布局, 尾部有4個舵面, 前段裝有反安定面, 均呈X字型布局; 導彈尾端有6個尾噴口, 以滿足三個通道的直接力控制。 彈體氣動外形及直接力裝置布局如圖1所示。

圖1 彈體氣動外形及直接力裝置Fig.1 Aerodynamic shape of missile and reaction thrust device
1.2 導彈動力學模型
由于導彈的俯仰運動與偏航運動本質上基本相同, 這里僅以俯仰通道為例進行控制系統設計。 本文采用的直接力裝置產生的推力大小固定、 工作時間連續可控, 對于此直接力/氣動力復合導彈, 在俯仰通道上的小擾動線性化方程[13]為

(1)


(2)
式中:
同時, 氣動舵采用如下二階模型:
(3)
直接力裝置采用如下一階模型:
(4)
2 導彈直接力/氣動力復合自動駕駛儀設計
2.1 三回路自動駕駛儀設計
空空導彈飛行控制系統由導彈自動駕駛儀和導彈彈體動力學環節組成。 自動駕駛儀是實現導彈自動控制的重要部件, 其功能就是發出舵面偏轉指令, 使彈體進行平動與轉動, 從而實現導彈的穩定與控制。 本文采用三回路加速度駕駛儀, 其結構框圖如圖2所示。

圖2 導彈三回路駕駛儀Fig.2 Three-loop autopilot of missile
其中, 三個回路分別為: 阻尼回路、 增穩回路和加速度回路。 阻尼回路的作用是增加系統阻尼; 增穩回路可以使彈體穩定性增加; 加速度回路采用閉環設計, 使輸出能更好地追蹤輸入[14]。
當只有氣動力作用時,uy=0, 則與直接力相關的輸出量有AT=0,ωT=0, 由式(2)可得如下關系:
法向加速度傳遞函數為
(5)
角速度傳遞函數為
(6)

駕駛儀中的參數可利用頻域設計法求出[15]:
(7)
(8)
(9)
(10)

根據不同的指標需求, 選取ωCR,ξ,τ合適的值, 即可得出駕駛儀所需參數。
2.2 直接力/氣動力復合自動駕駛儀設計


圖3 直接力前饋控制Fig.3 Feed forward control of reaction thrust
3 自適應模糊控制器設計
3.1 基于模糊控制的直接力控制系統設計
對于本文設計的直接力/氣動力復合自動駕駛儀, 其直接力工作時間及分配比例都是固定的, 在不同飛行狀態下難以達到最高效率, 且駕駛儀部分參數需要重新設計。 為了更有效地利用直接力, 并簡化駕駛儀設計過程, 使用模糊控制對直接力部分進行控制律設計。
模糊控制理論包括模糊集合理論、 模糊邏輯、 模糊推理及模糊控制等, 是采用模糊數學語言描述的控制律來操縱系統工作的控制方式。 模糊控制最大的特點就是反映了人的思維方式, 所以其本質也是一種語言控制器, 因此模糊規則易于構造, 容易通過軟件實現。
加入模糊控制后的直接力/氣動力復合控制模型如圖4所示。 模型內所使用的T-S模糊控制器是一組由“if-then”語句組成的模糊控制器。 T-S模糊控制器的設計重點在于對隸屬函數A的設計以及確定輸出函數f(x)中的參數。

圖4 直接力/氣動力復合模糊控制系統Fig.4 Reaction thrust /aerodynamic compound fuzzy control system
以過載指令、 飛行狀態(飛行高度、 馬赫數等)作為輸入, 以直接力機構輸入ty、 氣動力分配比例G作為輸出, 采用如下模糊控制指令: “ifxiisAi, thenyj=fj(xi)(i=1, 2, 3;j=1, 2)”。 其中, 輸入x1為加速度指令(m/s2),x2為飛行高度(km),x3為飛行馬赫數,A1,A2,A3為對應的隸屬函數; 輸出y1為直接力控制時間(ms),y2為氣動力分配比例G。
3.2 基于自適應控制的氣動力控制系統設計
對于所設計的直接力/氣動力復合控制系統, 在提高上升時間的同時, 超調量也會增大。 為了抑制超調量, 使加速度輸出能夠更好地追蹤指令, 使用模型參考自適應控制對氣動力部分進行調節, 提高整個系統的控制品質。
定理1(大范圍一致漸近穩定理論)[17]
對于連續時間的非線性時變系統, 有
(11)
定理2
對于n維線性定常系統, 有
(12)
漸近穩定的充要條件是, 對給定的任一正定對稱矩陣Q, 都存在唯一的對稱正定矩陣P, 滿足如下矩陣的李雅普諾夫方程:
ATP+PA=-Q
(13)
為方便計算, 矩陣Q通常取為單位陣I, 此時式(13)轉化為
ATP+PA=-I
(14)
對于所建立的模型, 設計如圖5所示的自適應控制系統[18], 可調系統的狀態方程為
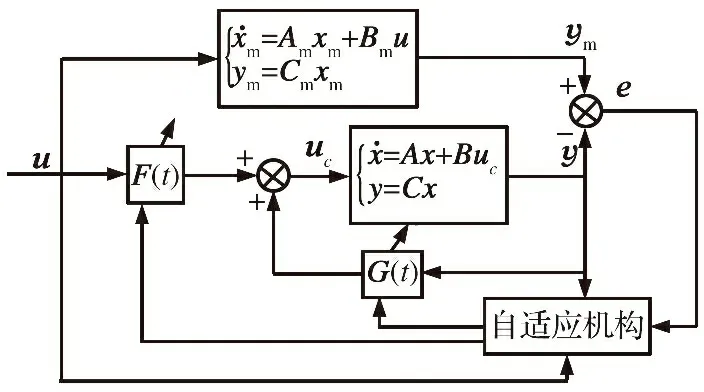
圖5 具有可調增益的模型參考自適應控制系統結構圖Fig.5 Block diagram of MRAC system with adjustable gain

(15)
式中:uc=F(t)u+G(t)y。
設參考模型狀態方程為

(16)
則系統的廣義輸出誤差向量為
e=ym-y
(17)
則

C(Ax+Buc)
(18)
將uc=F(t)u+G(t)y代入式(18)得
(19)

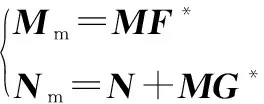
(20)
式中: *表示最佳取值。
將式(20)代入式(19), 有
(21)

用李雅普諾夫穩定性理論設計自適應律, 取李雅普諾夫函數為
(22)
式中:P1,P2,P3為正定對稱陣。
則


(23)

(24)
(25)
故自適應律為
(26)
若e(t)=0, 根據式(21)有
(27)

4 仿真結果與分析
選取導彈在兩個特征點進行仿真。 特征點1: 飛行高度20 km, 飛行馬赫數2.5, 加速度指令100 m/s2。 特征點2: 飛行高度30 km, 飛行馬赫數3, 加速度指令50 m/s2。 舵機模型參數ωδ=0.005,ξδ=0.6, 舵偏限幅-30°≤δ≤30°; 直接力裝置模型參數τu=0.01, 單個尾噴管推力Ty=2 500 N。 在簡單直接力/氣動力復合控制中, 直接力作用時間50 ms, 分配比例G=0.5。 對于兩個特征點, 分別有如下模糊規則:
Ifx1is 100 andx2is 20 andx3is 2.5, theny1=60,y2=0.625 1
Ifx1is 50 andx2is 30 andx3is 3, theny1=70,y2= -0.19
分配比例中出現負數值的原因是: 為了在低動壓的情況下快速使導彈達到指令加速度, 直接力產生的加速度值已經超過了指令值, 因此需要氣動舵產生一個負的加速度值, 以使導彈整體加速度等于指令加速度。
仿真曲線如圖6~7所示, 圖中藍色虛線為輸入指令的85%, 以此標準來判斷上升時間。
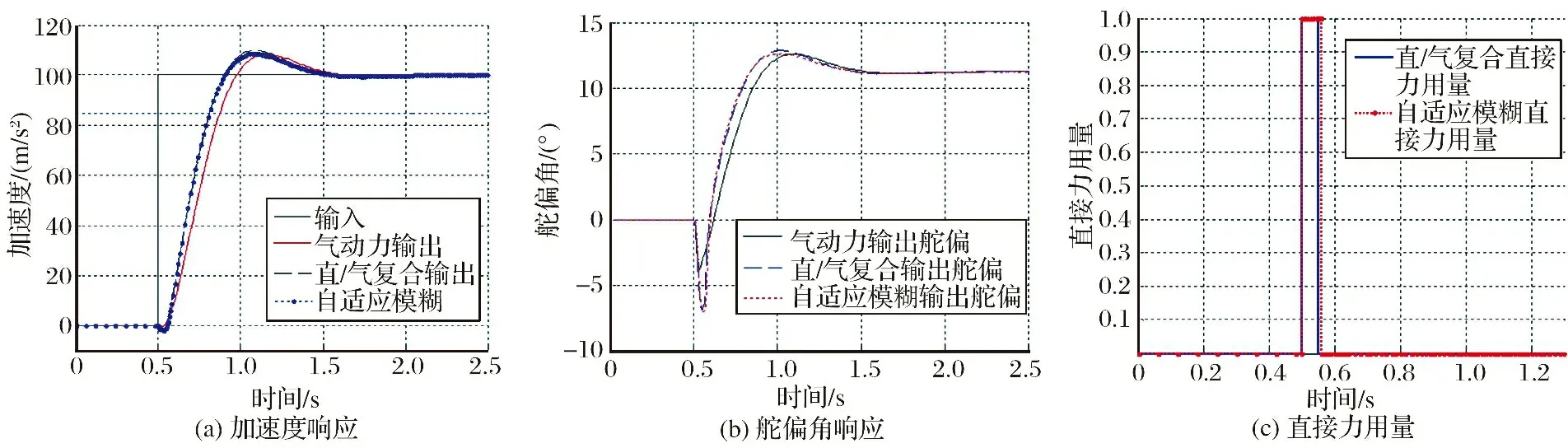
圖6 特征點1Fig.6 Feature point 1
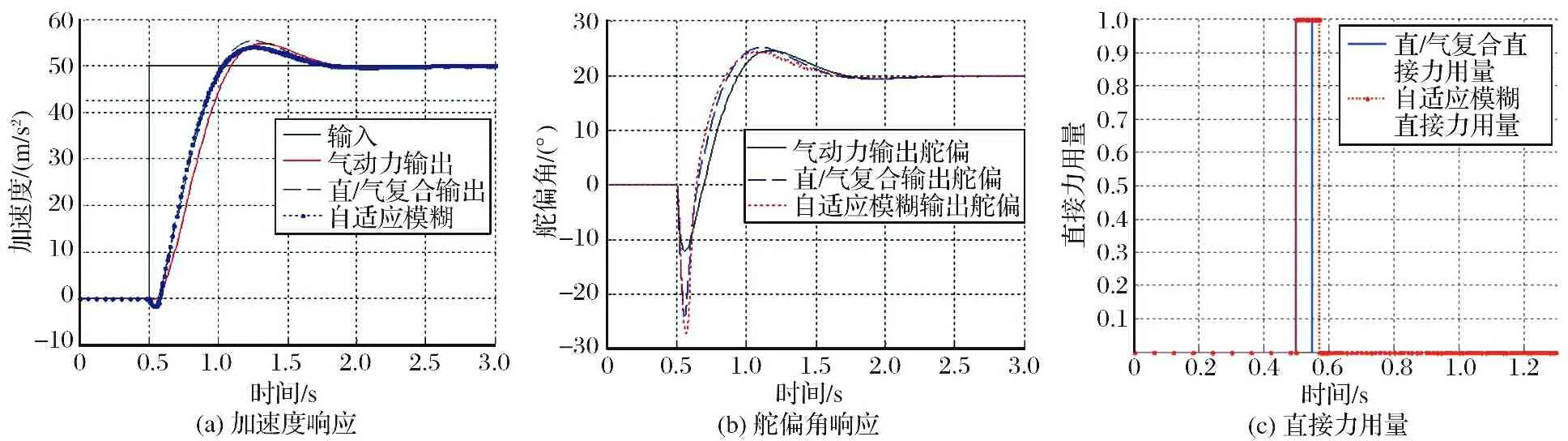
圖7 特征點2Fig.7 Feature point 2
從圖中不難看出, 相比于純氣動舵, 采用直接力/氣動力復合控制方式能夠顯著提高系統的上升時間, 但同時也會使系統的超調量增大, 無法控制直接力作用時間; 使用模糊控制與自適應控制對直接力/氣動力復合系統進行優化, 既能靈活調整直接力工作時間及直接力/氣動力的分配比例, 同時在上升時間幾乎不變的情況下使超調量大幅減小, 使加速度輸出能夠更好地跟蹤輸入指令。
5 結 論
本文針對空空導彈在高空低動壓的情況下, 對于加速度指令響應較慢的問題, 設計了基于自適應模糊控制的直接力/氣動力復合控制系統, 使用T-S模糊控制器對直接力進行控制, 使直接力在不同的飛行狀態及加速度指令下能實現不同的工作時長, 不過該模糊控制器的規則設計過于依靠設計經驗; 同時利用模型參考自適應對系統整體進行優化, 選取合適的參考模型, 提升系統控制品質。 通過仿真可以看出, 相比于純氣動舵自動駕駛儀, 基于自適應模糊控制的直接力/氣動力復合控制系統具有更好的控制效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
