渦波一體乘波飛行器寬速域氣動優化設計研究1)
2023-02-25 02:24:30劉超宇屈峰李杰奇白俊強劉傳振錢戰森
力學學報 2023年1期
劉超宇 屈峰,2) 李杰奇 白俊強 劉傳振 白 鵬 錢戰森
* (西北工業大學航空學院,西安 710072)
? (中國運載火箭技術研究院,北京 100076)
** (中國航天空氣動力技術研究院,北京 100074)
?? (中國航空工業空氣動力研究院,沈陽 110034)
引言
近年來,具備寬速域、寬空域、水平起降等能力的空天飛行器成為研究的熱點.此類飛行器要求從常規機場水平起飛,歷經低速、跨聲速、超聲速直至高超聲速巡航等多個飛行階段[1],因此,如何在寬速域內保持良好的氣動性能是此類飛行器研究的難點.常規的構型比如細長體、組合體、融合體、升力體等,高超聲速氣動性能欠佳[2].相應地,乘波飛行器利用前緣的附體激波阻止氣流泄露,具有更好的高超聲速升阻特性,已成為多款高超聲速飛行器的基礎構型[3].但是,傳統的乘波體設計方法都是基于超聲速假設建立的,通常具有低速氣動性能不佳的缺陷.因此,若要將乘波理念應用于空天飛行器,如何提升其寬速域氣動性能至關重要[4].
當前,國內外關于如何改善乘波體在低速時氣動特性的研究相對較少,比較有代表性的是渦升力乘波體[5-7].其中,劉傳振等[2,8-11]基于密切錐方法,通過對平面形狀的合理定制引入渦效應,分別在高超聲速和低速使用激波和旋渦提高氣動性能,提出了一種渦波一體寬速域乘波飛行器.但是該類飛行器在設計過程中進行基準流場建立時忽略了三維效應、低速效應、以及黏性效應,因此其高低速氣動特性均有較大的優化設計空間[2].此外,工程化的外形需要在理論模型的基礎上實現頭部/前緣鈍化以及側緣設計,而這些局部變化會對其氣動特性產生較大的不利影響.因此,為使渦波一體寬速域飛行器更具工程應用價值,有必要對其開展兼顧不同速域性能的氣動優化設計.
近年來,諸多學者針對飛行器兼顧不同速域氣動性能的優化設計開展了研究.例如,Ueno 等[12]對高超聲速翼型進行了優化設計,在保證高超聲速高升阻比的同時,兼顧了翼型的跨聲速氣動性能.隨后,Ueno 等[13]又采用梯度優化方法開展了機翼的寬速域氣動優化設計研究,優化得到的二維翼型配置到機翼上可以明顯改善機翼的寬速域氣動性能.國內的孫祥程等[14]和張陽等[15-17]也開展了高超聲速寬速域翼型優化設計研究,并得到了寬速域性能改善后的新翼型.但是,上述研究仍處于初步探索階段,且多針對二維翼型或三維機翼等局部構件,缺乏三維復雜飛行器整機的寬速域優化設計研究.
氣動優化設計方法方面,目前常用的氣動優化設計方法主要可分為非梯度優化方法和梯度優化方法.非梯度優化方法主要包括啟發式優化方法和代理優化方法,這些優化方法雖具有較強的全局尋優能力,但在針對設計變量眾多的寬速域乘波飛行器三維整機開展氣動優化設計時,會出現計算量過大的不足,一些情況下甚至可能得不到收斂結果[18-21].而基于伴隨方程的梯度類優化設計方法可實現計算量與設計變量之間的基本解耦,并且精度較高,在大規模設計變量問題中具有明顯優勢[22],比較適合于設計變量眾多的渦波一體寬速域飛行器整機氣動優化設計.
綜上所述,為了進一步改善渦波一體乘波飛行器的寬速域氣動特性,本文采用一種基于離散伴隨的寬速域飛行器氣動優化設計方法,針對渦波一體乘波飛行器開展了兼顧高低速域氣動性能的三維整機氣動優化設計研究,以期為寬速域大空域的空天飛行器設計提供參考.
1 渦波一體寬速域乘波飛行器
本文選取的渦波一體寬速域乘波飛行器初始構型是基于定平面密切錐方法設計得到的[8],該類飛行器采用雙后掠布局設計,因此又可稱為雙后掠乘波體.該類乘波體通過對平面形狀的合理定制引入渦效應,可以在保持高超聲速高升阻比的基礎上低速性能不下降,兼顧了寬速域特性,為寬速域大空域的空天飛行器設計提供了新的思路.
圖1 為渦波一體寬速域乘波飛行器的初始幾何外形,表1 給出了初始構型的設計狀態和相關設計變量.其中,該構型的第一后掠角為 λ1=75?,第二后掠角為 λ2=50?,長度l約4 m,翼展d=4.8 m,其設計狀態為馬赫數Ma=5,高度H=30 km,激波角為β=12?.理論乘波體外形前緣尖銳,但實際應用過程中不可能實現.因此,本文采用文獻[23]中的方法,將上表面抬高以對渦波一體寬速域乘波飛行器前緣進行鈍化處理,鈍化半徑為r=2 mm.
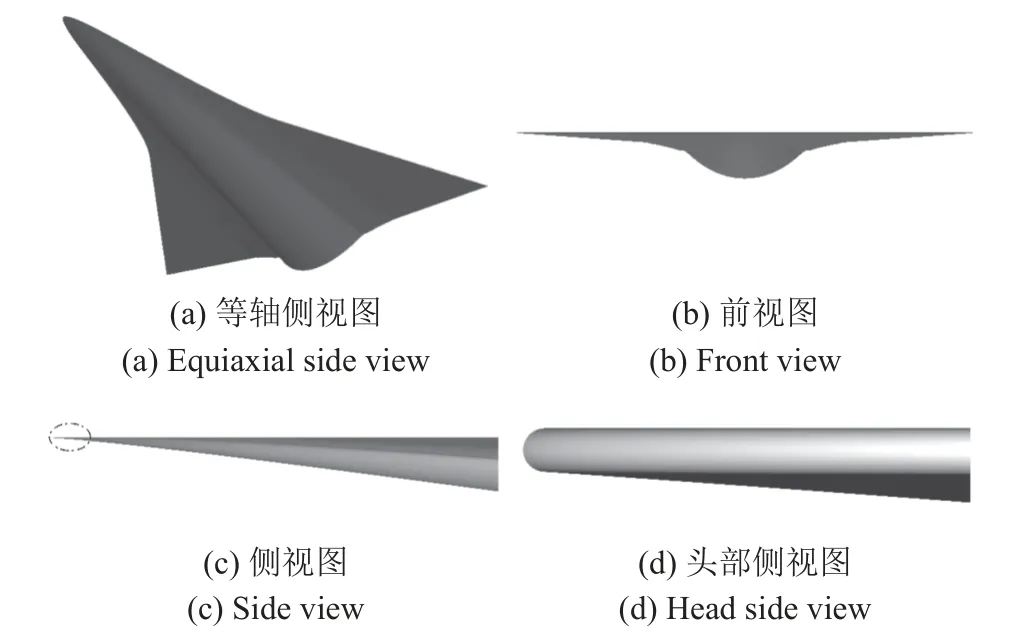
圖1 渦波一體寬速域乘波飛行器初始構型Fig.1 Initial configuration of the wide-speed-range waverider with vortex-shock effects

表1 初始構型設計參數Table 1 Initial configuration design parameters
2 數值模擬方法及精度驗證
2.1 數值模擬方法
數值模擬計算采用結構網格的RANS 求解器[24].該求解器基于MPI 并行計算,時間推進采用隱式LUSGS-GMRES 混合方法以保證定常流動求解的穩定性和收斂效率,空間離散方法采用二階MUSCL重構方法以及“minmod”限制器,通量求解方法采用適用于全速域流動計算的HLLEMS 格式[25],湍流模型采用Spalart-Allmaras (SA)一方程模型.
2.2 數值模擬可靠性驗證
由于本文的研究涉及寬速域飛行器的亞聲速和高超聲速條件下的氣動特性,為了驗證RANS 求解器的數值模擬精度,分別與亞聲速和高超聲速的風洞試驗數據進行了對比.
2.2.1 亞聲速流動數值模擬驗證
亞聲速條件下,參考第二次國際渦流實驗(VFE-2)的三角翼幾何模型的風洞試驗數據[26],亞聲速試驗條件為: 自由來流馬赫數Ma=0.4,雷諾數Re=6.0×107,迎角 α=13.3?.數值模擬求解的計算狀態與亞聲速試驗條件保持一致.圖2 給出了三角翼流向兩個不同站位處的壓力系數分布對比.將數值模擬結果與風洞試驗數據進行對比,可以看出兩者的壓力系數分布吻合良好.
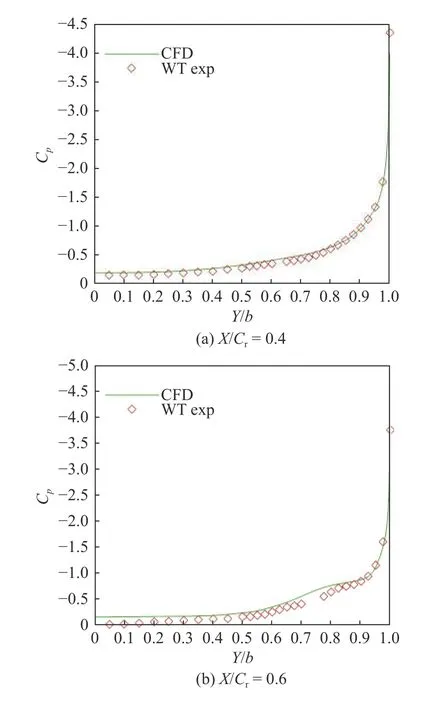
圖2 低速條件數值模擬數據(CFD)與風洞試驗數據(exp)對比Fig.2 Comparison between numerical simulation results (CFD) and wind-tunnel experimental (exp) datas at low speed
2.2.2 高超聲速流動數值模擬驗證
在高超聲速條件下,針對雙后掠乘波體試驗模型開展設計馬赫數狀態的風洞試驗,并對其進行數值模擬對比驗證[27].其中,彎頭雙后掠乘波體的高超聲速風洞試驗條件為: 馬赫數Ma=4.937,雷諾數Re=2.133×107,總壓P0=1 008 575 Pa,總溫T0=96.9 K.圖3 給出了雙后掠乘波體的數值模擬與風洞試驗的氣動力系數對比,可以看出不同迎角下的升力系數和阻力系數與風洞試驗結果趨勢保持一致.相比風洞試驗,CFD 計算的氣動力均略小,但兩者的氣動力系數相差均在3%以內.通過上述與風洞試驗數據的對比驗證,說明本文所采用的數值模擬方法是精確有效的.
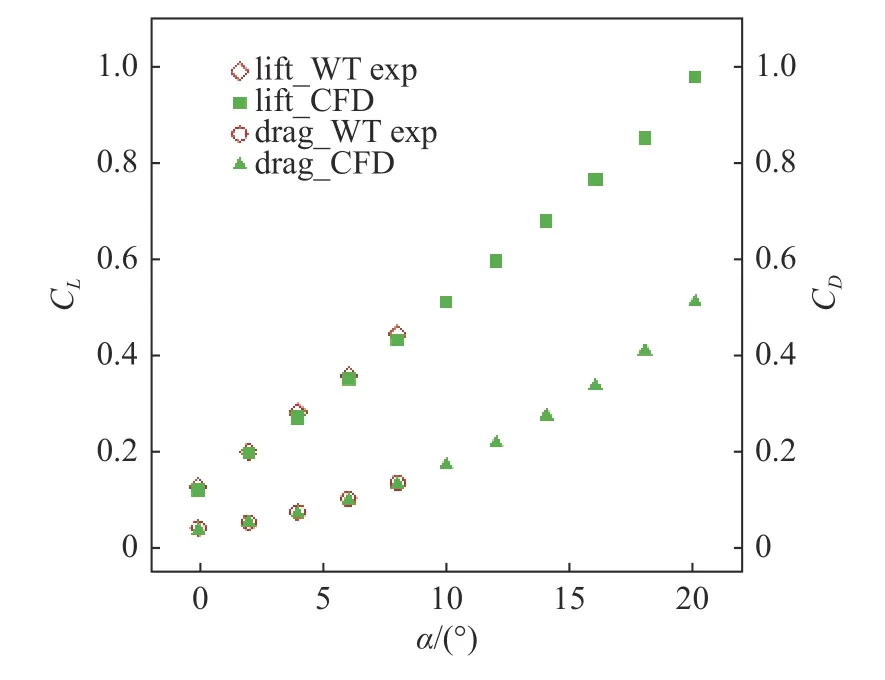
圖3 高速條件數值模擬數據(CFD)與風洞試驗數據(exp)對比Fig.3 Comparison between numerical simulation results (CFD) and wind-tunnel experimental (exp) datas at high speed
3 基于伴隨的寬速域飛行器氣動優化設計方法
3.1 伴隨梯度求解及精度驗證
采用離散伴隨方程法求解梯度是該氣動優化設計平臺的核心,通過用式(1) 中目標函數F以及式(2)中控制方程殘差R分別對設計變量x求導數,得到
然后將上式進行恒等變換得到
式中,x為設計變量,w為控制方程中的狀態變量,如CFD 計算中的每個網格單元中的密度、速度等,對于任一給定的x都可以通過控制方程求解得到w,ψ為伴隨算子,式(6)即為伴隨方程.通過變換可將式(3)中耗時的 dw/dx求解轉換為式(6)中的大規模線性方程組求解,具體可參考文獻[28].
采用適用于高維設計變量的FFD 方法[29-30]對渦波一體寬速域乘波飛行器初始外形進行精細參數化,圖4 給出了渦波一體寬速域乘波飛行器的FFD控制框.由于渦波一體寬速域乘波飛行器采用的是非傳統的旋成體式前沿氣動布局,這導致其表面是由一系列的光滑曲面組合而成,這些曲面的形狀可以任意變化,即滿足設計約束條件的布局外形具有較大的設計空間;另外,該類飛行器的氣動特性對布局外形的變化也具有較高的靈敏度.因此,為更加精細地量化表征渦波一體寬速域乘波飛行器的初始外形,盡可能包含更廣的優化設計空間,FFD 控制框半模共布置有15 個控制剖面,全模共29 個控制剖面.每個控制剖面沿流向上下表面各有17 個控制點,共34 個控制點.每個控制點只能沿Z向移動,用來對寬速域乘波飛行器的型面進行擾動.另外,為了保持前后緣線為初始型線,每個控制剖面上下表面沿弦向第一個和最后一個點保持不動.因此共有870 個FFD 控制點位移設計變量.
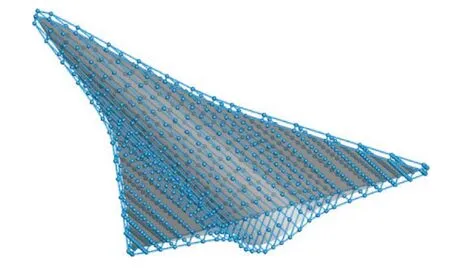
圖4 渦波一體寬速域乘波飛行器FFD 控制框Fig.4 The FFD box of the wide-speed-range waverider with vortexshock effects
對FFD 控制點進行擾動,采用一組隨機數選取15 個幾何設計變量進行梯度信息求解精度驗證.將伴隨方程求解的升、阻力系數梯度信息與采用有限差分法計算得到的梯度值進行對比,有限差分步長為 1 ×10?4.兩種方法求解得到的升、阻力系數對設計變量的梯度對比結果見表2 和表3.可以看出,基于伴隨方程的梯度與有限差分結果吻合較好,相對誤差范圍在 1 0?3~10?4,說明伴隨方程法在求解梯度時具有較高的計算精度.
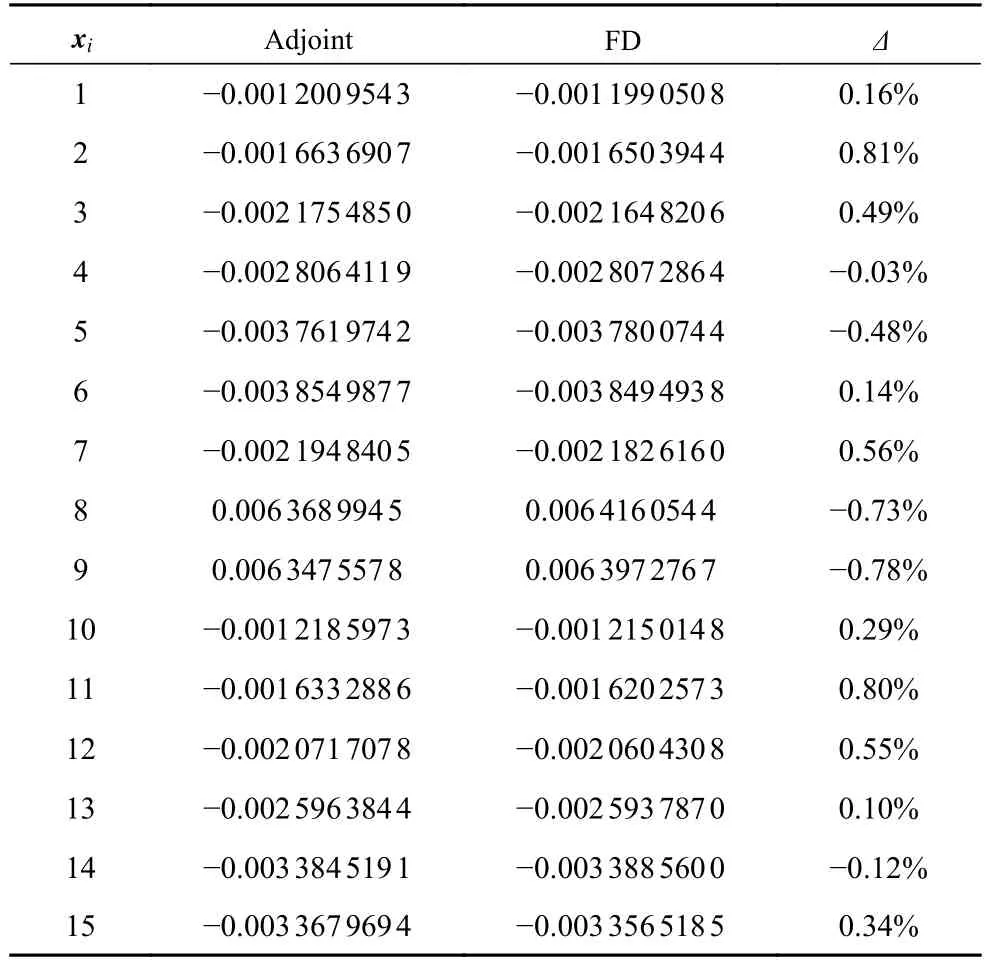
表2 伴隨方法和有限差分法 CL 梯度計算結果對比Table 2 Comparison of the calculated gradient of C L between adjoint method and finite difference method
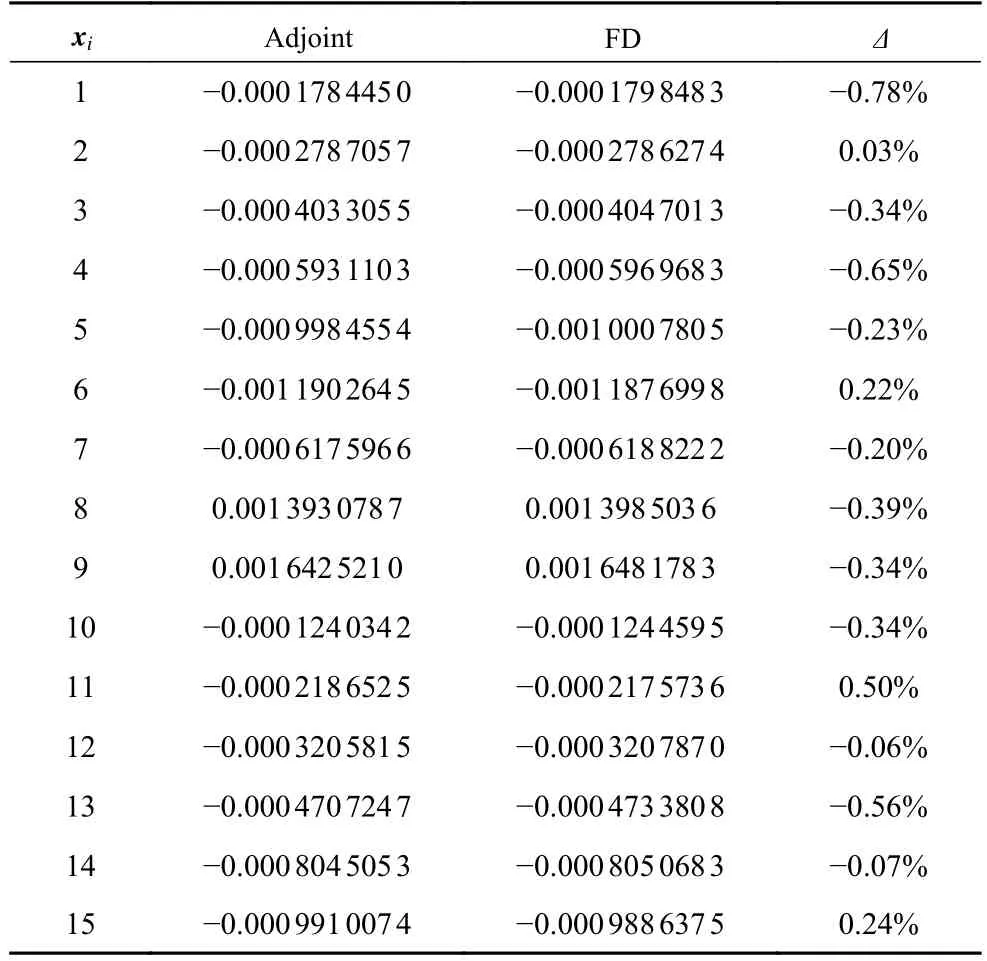
表3 伴隨方法和有限差分法 C D 梯度計算結果對比Table 3 Comparison of the calculated gradient of C D between adjoint method and finite difference method
3.2 梯度優化設計平臺
基于第二節中的RANS 流場求解器,通過結合適用于高維的FFD 參數化方法、魯棒的結構網格變形方法、離散伴隨方法和SQP 算法,在現有的基于離散伴隨的高超聲速飛行器氣動優化設計平臺[24]的基礎上發展了寬速域氣動伴隨優化設計方法,其流程圖如圖5 所示.對于寬速域優化問題,首先,基于飛行器初始外形需分別生成在低速和高超聲速狀態下用于CFD 計算的空間網格;其次,需在低速和高速狀態下分別進行CFD 流場計算;然后,可以將低速和高速的氣動目標參數采用加權和方式組成單一目標函數,也可以將某一速域的參數作為優化目標,其余參數作為約束條件,本文采用的是加權求和方法.其中,不同權重因子的設置能夠改變優化的側重點,以達到期望的優化結果.
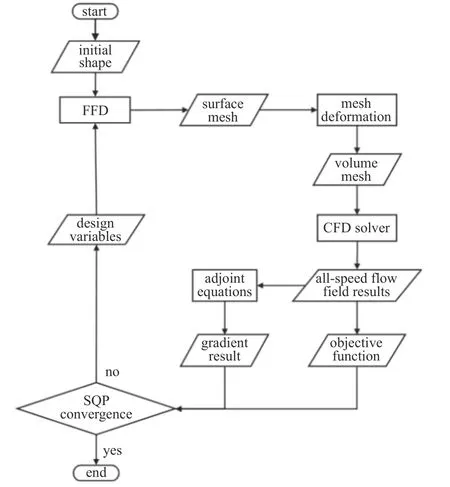
圖5 基于離散伴隨的寬速域飛行器氣動優化設計方法流程圖Fig.5 The flow chart of the aerodynamic shape optimization design software for the wide-speed-range vehicle based on the discretized adjoint method
4 兼顧低速與高超聲速氣動性能的寬速域飛行器優化設計
基于上文實現的寬速域飛行器離散伴隨氣動優化設計方法,本節針對定平面形狀的渦波一體寬速域乘波構型開展了在最大升阻比工況下的三維整機寬速域氣動優化設計.
4.1 優化設計問題
根據文獻[8]可知,渦波一體寬速域乘波飛行器在低速和高超聲速設計狀態下最大升阻比對應的迎角在4°附近,因此,本文寬速域優化設計選取初始構型在最大升阻比點對應的工況分別為: 低速Ma=0.4,H=0 km,α=4?,高超聲速Ma=5.0,H=30 km,α=4?.
優化問題的數學模型描述如下
由于寬速域優化設計需要評估外形的低速和高超聲速氣動性能,因此計算網格需要兼顧低速和高速的計算需求.本文根據優化設計需求設計了適用于高超聲速環境和低速環境模擬的兩套多塊結構網格,網格如圖6 和圖7 所示.高速網格在激波間斷處盡量順激波方向,黏性層法向網格盡量保證垂直壁面,流向氣流參數梯度較大處保證足夠的流向網格密度.低速網格是在高超聲速網格的基礎上增大其邊界跨度,其跨度約為初始外形長度的30 倍.
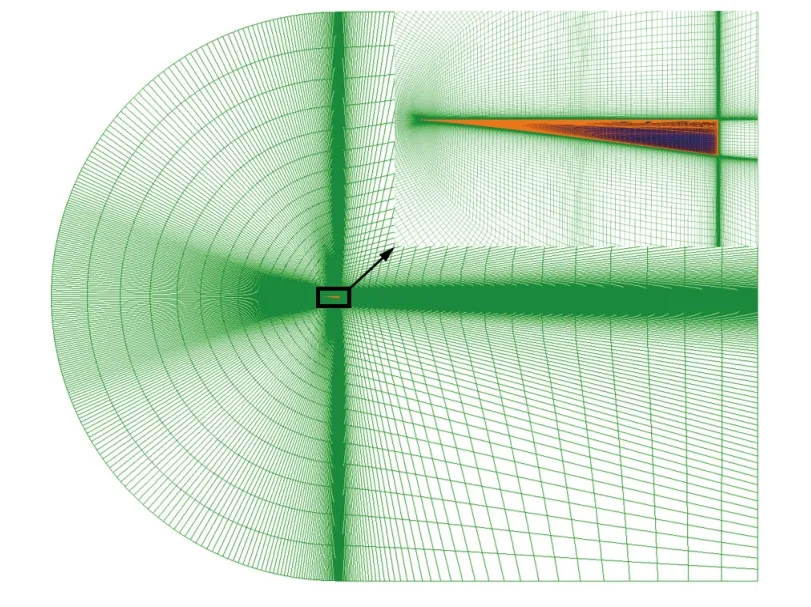
圖6 低速計算網格Fig.6 Low speed computational grids
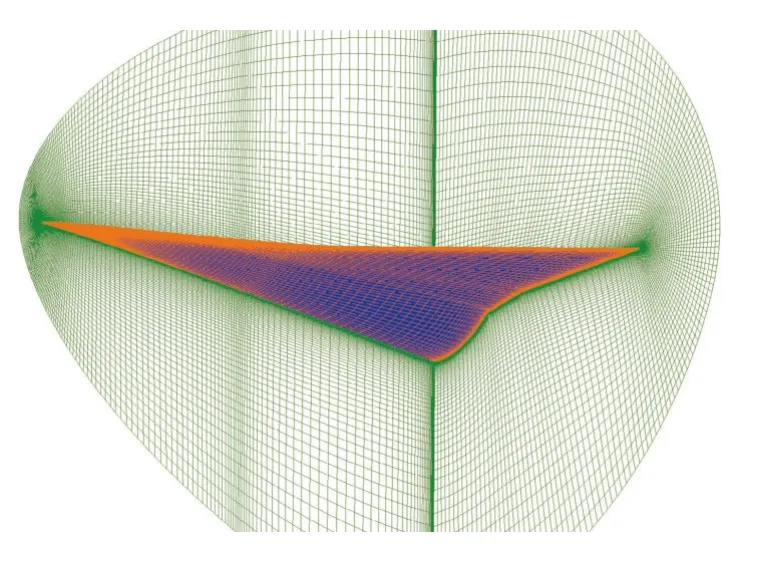
圖7 高速計算網格Fig.7 High speed computational grids
采用粗、中、細三套網格對本文所選用的渦波一體寬速域乘波飛行器進行網格無關性驗證,低速網格量分別是400 萬、800 萬和1100 萬,高速網格量分別為210 萬、400 萬和700 萬.表4 和表5 分別給出了在低速(Ma=0.4,H=0 km,α=4?) 和高速(Ma=5.0,H=30 km,α=4?) 下的網格無關性驗證結果,圖8 和圖9 給出了三種網格在低速和高速狀態下的表面壓力系數對比.可以看到,粗網格和中網格的表面壓力分布幾乎一致,他們與細網格的阻力系數相對誤差較小.因此,為保證優化設計過程中的計算精度和計算效率,本文選用粗網格進行寬速域氣動優化設計.
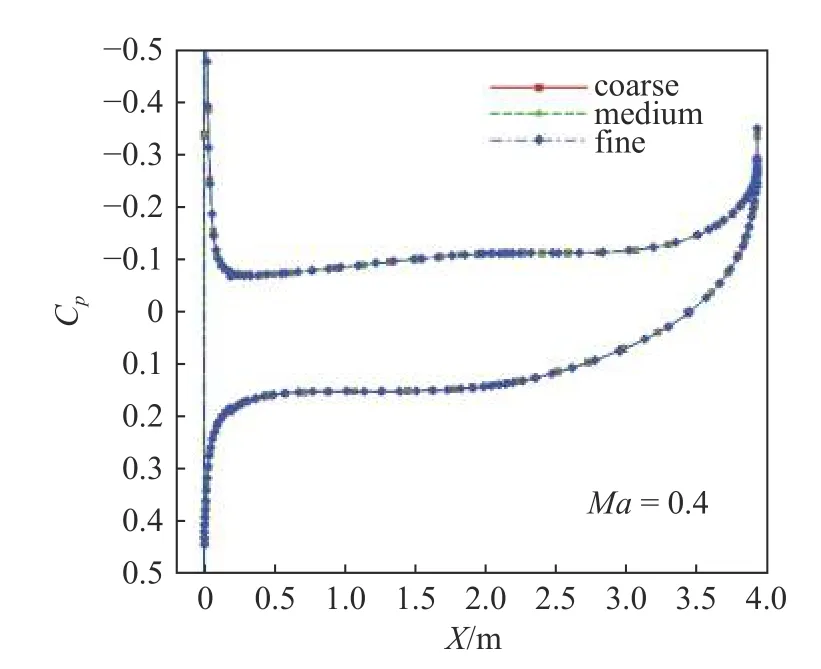
圖8 低速對稱面處表面壓力系數對比Fig.8 Comparison of surface pressure coefficient on the plane of symmetry at low speed
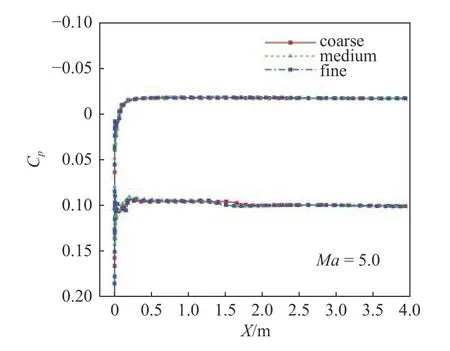
圖9 高速對稱面處表面壓力系數對比Fig.9 Comparison of surface pressure coefficient on the plane of symmetry at high speed
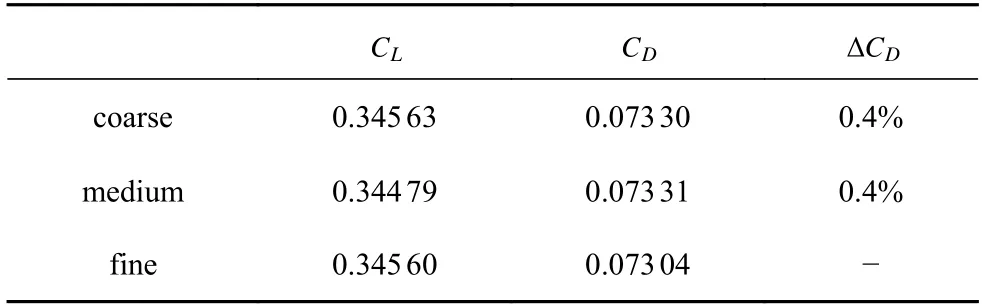
表4 低速網格無關性驗證結果Table 4 The compute results of waverider at low speed
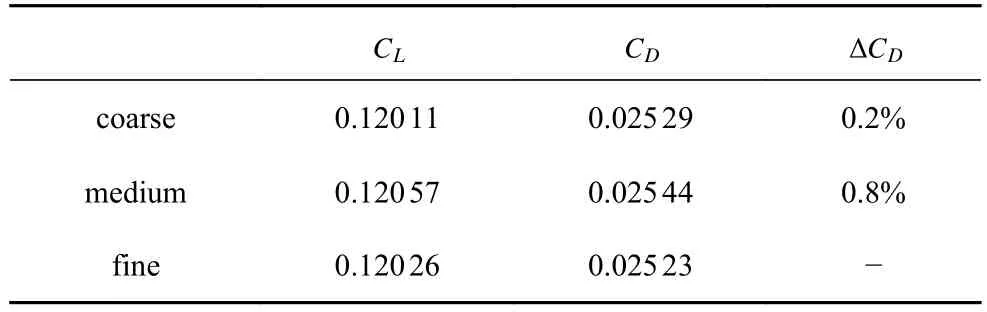
表5 高速網格無關性驗證結果Table 5 The compute results of waverider at high speed
4.2 優化設計結果及分析
關于寬速域優化設計的計算效率,基于MPI 并行方法在56 核CPU(主頻2.40 GHz)下開展整機優化設計,僅耗時約30 小時即完成10 次梯度優化迭代以及62 次流場求解,進而得到了收斂的優化構型.相較于初始構型,寬速域優化構型滿足厚度約束且其容積有小幅增加,增加了近3%.圖10 和圖11 給出了寬速域優化迭代收斂歷史.可以看出,優化中低速的升力和升阻比呈階梯狀上升,在第25 步之后,各速域升阻比變化趨于平緩.
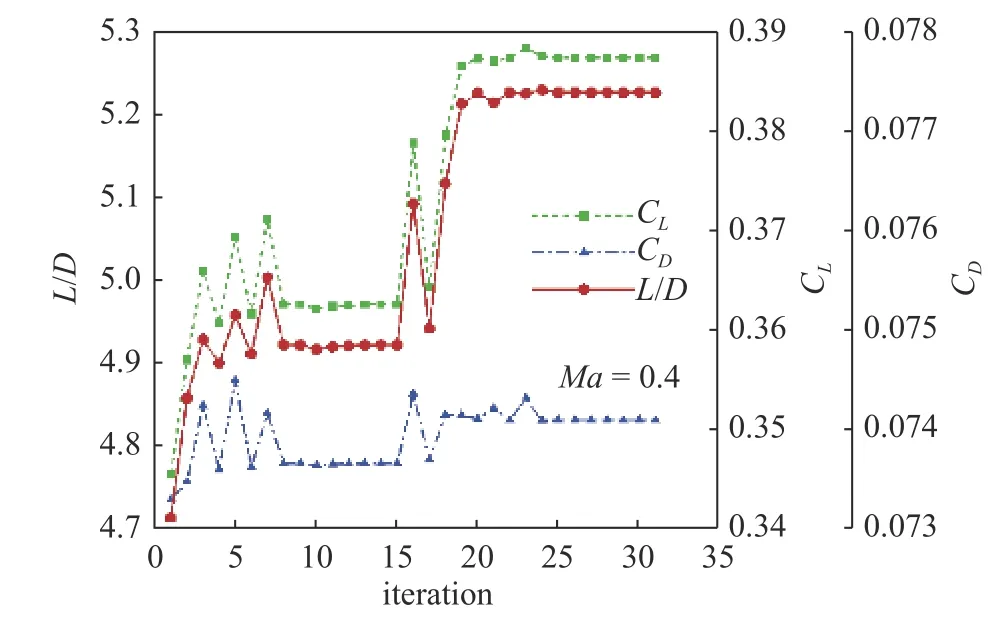
圖10 低速優化迭代收斂歷史(H=0 km)Fig.10 Convergence history of the multi-point optimization iterations at low speed (H=0 km)
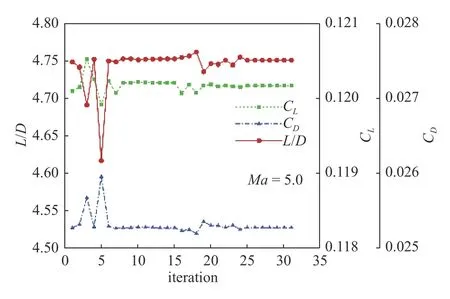
圖11 高超聲速優化迭代收斂歷史(H=30 km)Fig.11 Convergence history of the multi-point optimization iterations at high speed (H=30 km)
表6 對比了寬速域優化前后不同狀態對應的升阻力特性.可以看出,低速狀態的升阻比大幅增加,提升了10.9%.優化效果的來源主要為升力的明顯提升,提升了12.1%,阻力系數僅增加了8 counts.相對于初始外形,氣動優化得到的外形可以在保持高超聲速最大升阻比點具有良好氣動性能前提下,顯著提升低速最大升阻比點的整機氣動特性.
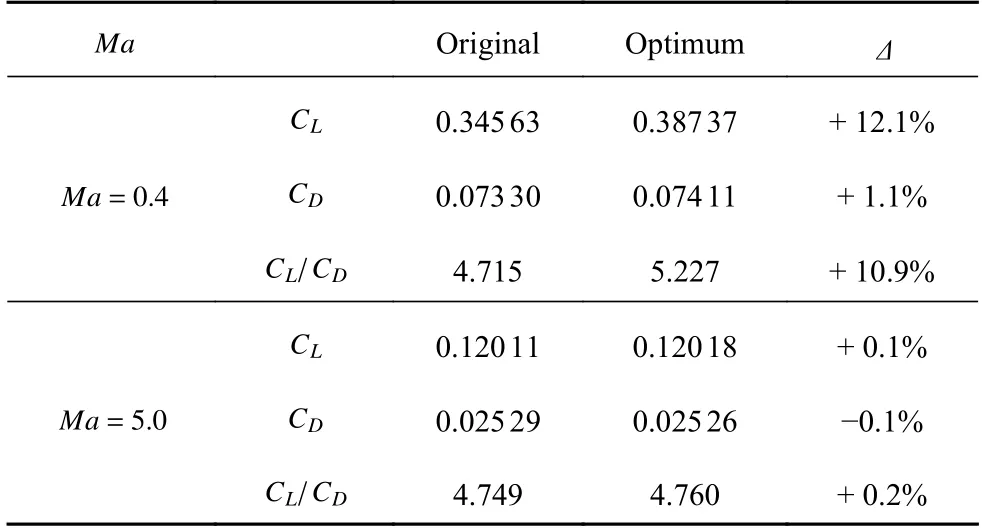
表6 優化前后升阻力特性對比Table 6 Comparison of the lift and drag characteristics
表7 給出了寬速域優化前后在不同狀態下壓心位置的變化情況.其中,CM為俯仰力矩系數的絕對值,力矩參考點為機頭對應的坐標原點,xcp代表壓心位置,即壓心距頭部的距離占全機長度的比例.可以看出,相較于初始構型,優化構型在低速和高速下的壓心位置均有小幅后移,縱向靜穩定性得到改善.低速狀態下的壓心位置變化相對明顯,由于優化構型的升力增量主要來源于底部附近的表面壓力變化,因此優化構型會產生更大的低頭力矩,導致壓心后移量較大.
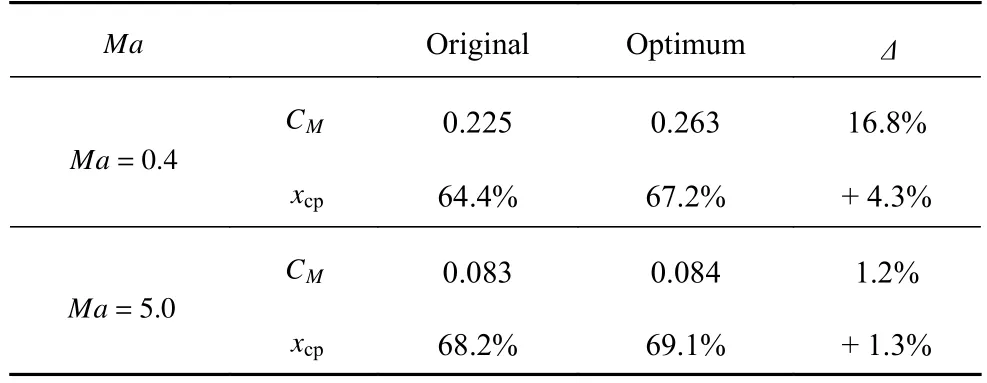
表7 優化前后壓心位置變化情況Table 7 Comparison of the pressure center position
4.2.1 低速流場分析
圖12 給出了渦波一體寬速域乘波飛行器優化前后低速背風面壓力云圖對比,同時也展示了低速空間渦結構對比.圖13 給出了優化前后低速迎風面壓力云圖對比.從背風面壓力云圖可以看出,由于初始外形的雙后掠設計,其在背風面兩側產生了強烈的旋渦結構,造成背風面前緣附近兩片大范圍的低壓區,有效地提高了升力特性,從而使雙后掠乘波體初始外形在低速下仍保持較好的氣動特性,即渦波一體乘波飛行器的“旋渦效應”.該“旋渦效應”來源于初始外形本身的雙后掠設計,在低速狀態下可以通過類似大后掠前翼引起旋渦,并通過類似外翼部分的擾動增強旋渦[2].而通過寬速域優化設計得到的優化外形進一步增強了雙后掠乘波體的“旋渦效應”,相較于初始外形,優化外形前翼引起的旋渦強度增強,背風面低壓區面積增加;外翼的擾動也更強,尤其是靠近底部的外翼部分,前緣渦向對稱面擴展直至中部,背風面附近流速加快,造成低壓區面積更大,從而使得優化外形升力大幅提升,顯著改善其氣動特性.從迎風面的壓力云圖同樣也可以看出,優化外形通過型面變化使得第一后掠角和第二后掠角交接處沿前緣向后延伸的高壓區域范圍增大,同時也改善了底部附近的低壓區范圍,使得迎風面提供的升力有所增加.
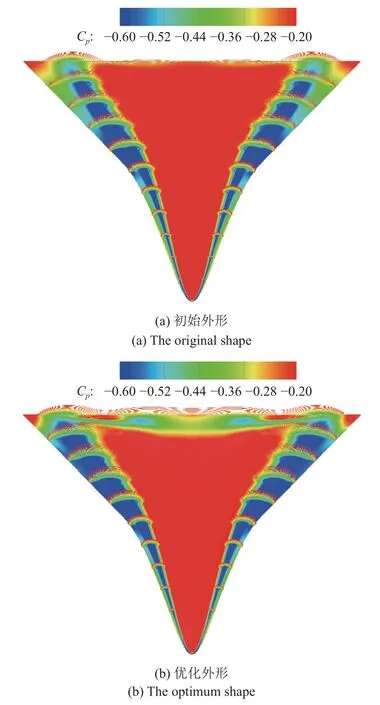
圖12 優化前后低速背風面壓力分布渦結構對比(H=0 km,Ma=0.4)Fig.12 Comparison of Cp distribution and vortex structure on the upper surface before and after optimization at low speed (H=0 km,Ma=0.4)
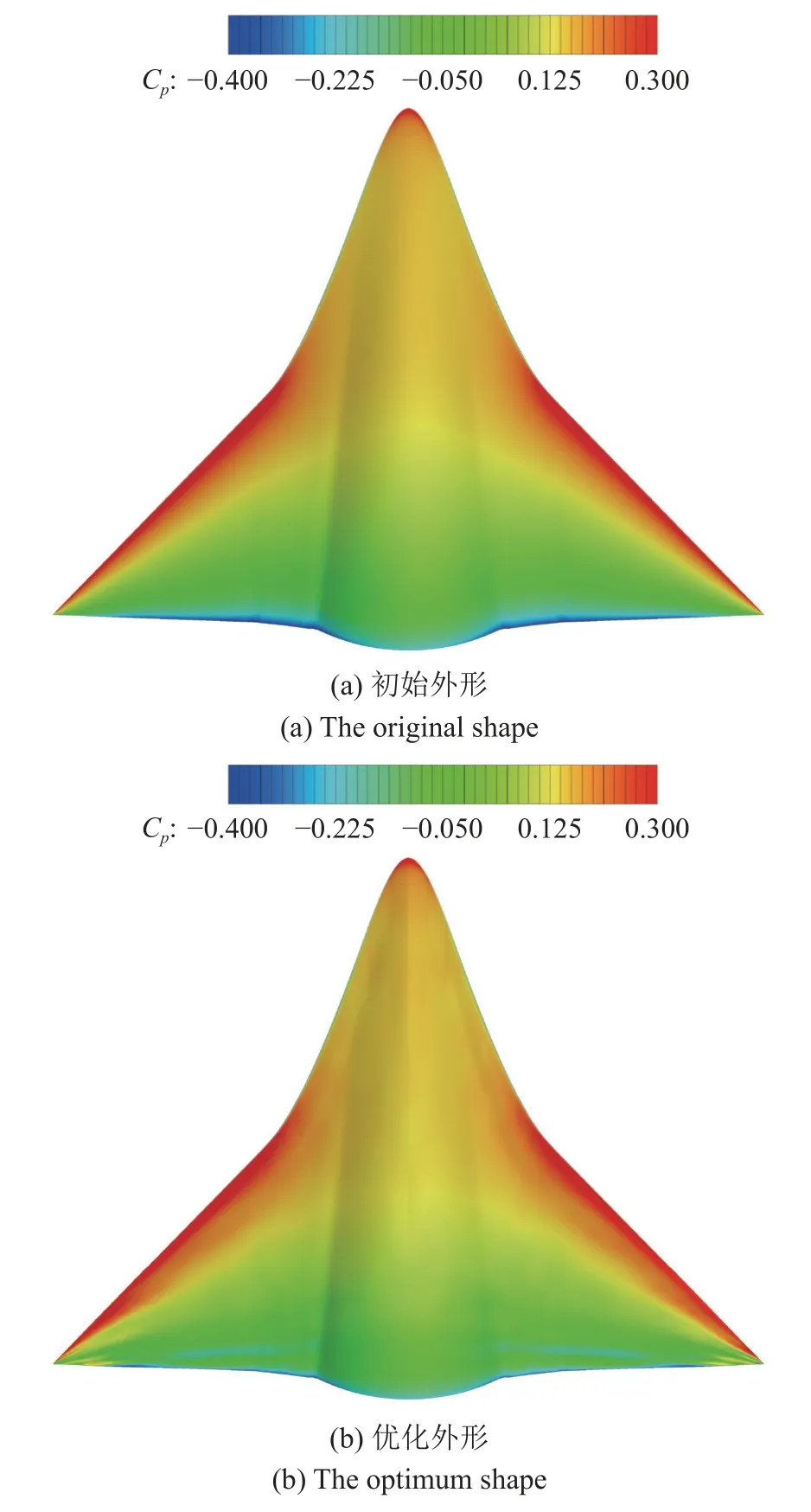
圖13 優化前后低速下表面壓力分布對比(H=0 km,Ma=0.4)Fig.13 Comparison of Cp distribution on the lower surface before and after optimization at low speed (H=0 km,Ma=0.4)
圖14 給出了流向各截面位置,圖15 給出了優化前后流向各截面表面壓力系數分布與幾何外形對比.從流向各站位可以看出,由于前緣引起的旋渦,背風面前緣附近的表面壓力分布出現突變,明顯減小.優化外形背風面在靠近前緣處向上凸起,使得渦結構向前緣移動,表面低壓區同時也向外側擴展,因此,優化外形背風面前緣附近的壓力更小.在靠近底部附近,由于優化外形上下型面均出現先上凸后下凹的變化,在靠近對稱面處出現第二個吸力峰值,但型面存在凹坑,導致背風面出現局部高壓區.另外,優化外形前緣下移,相對厚度減小,外翼的擾動更劇烈,迎風面壓力出現較大波動.
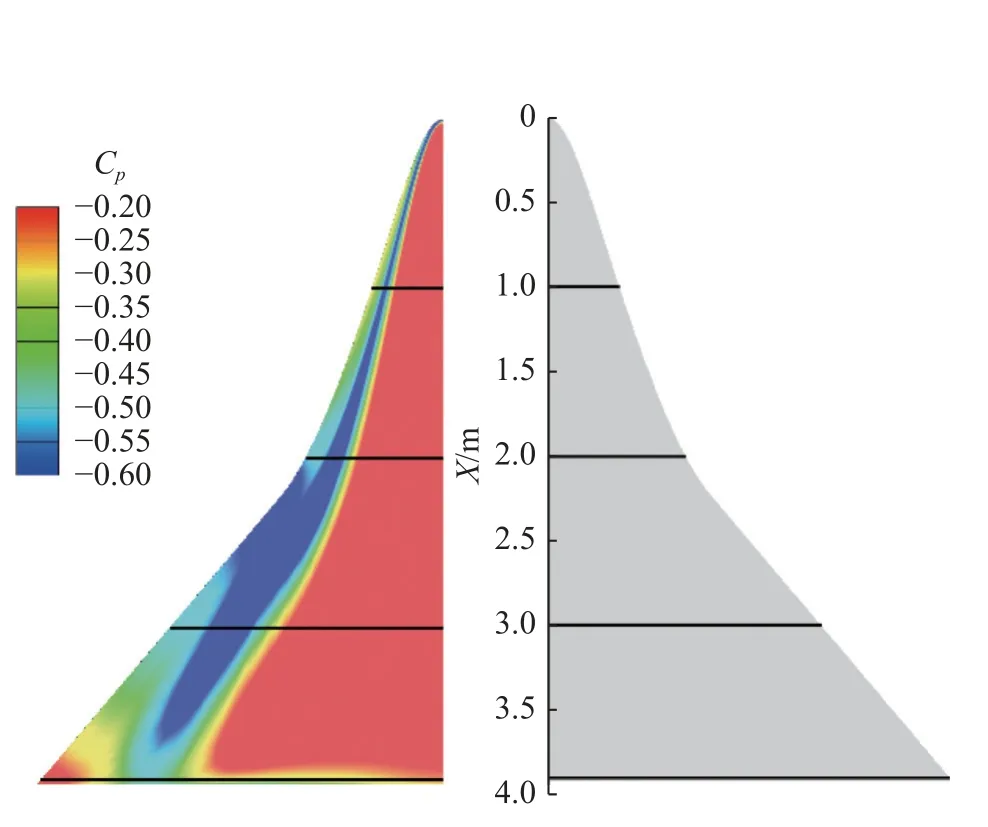
圖14 流向各截面位置Fig.14 Four stations of the initial configuration
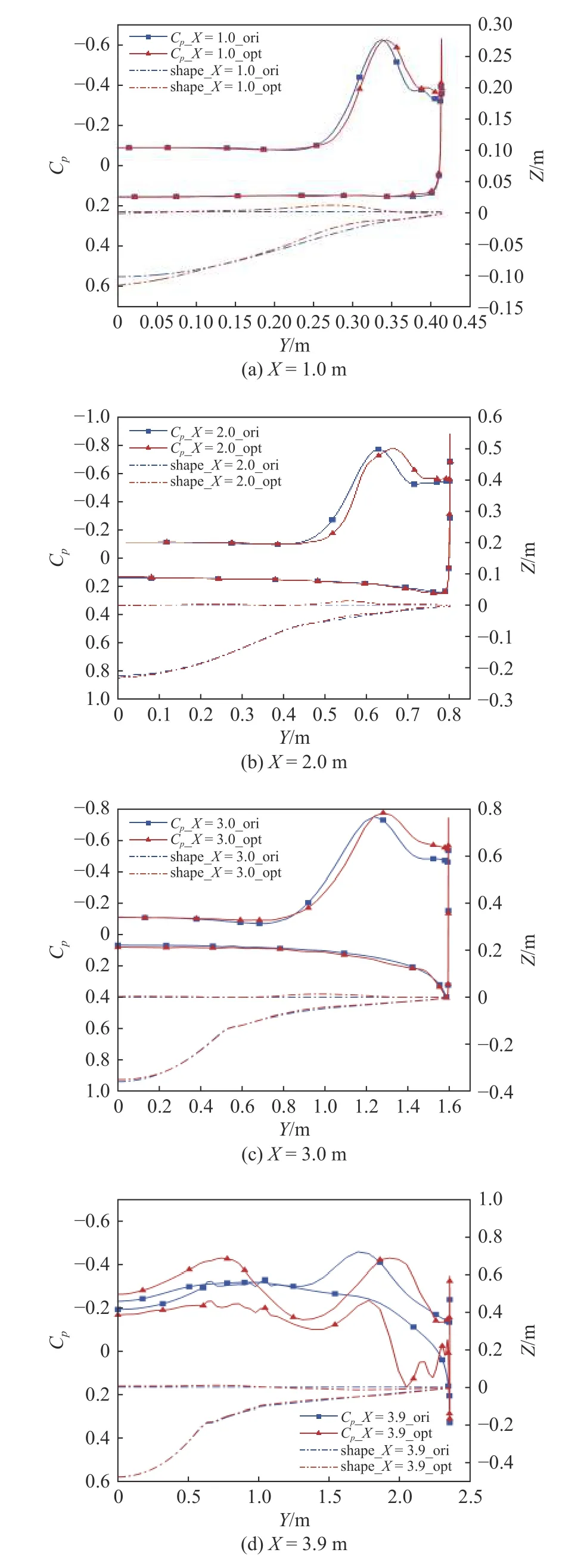
圖15 優化前后流向各截面表面壓力系數分布與幾何外形對比(H=0 km,Ma=0.4)Fig.15 Comparison of the Cp distribution and shape before and after optimization (H=0 km,Ma=0.4)
已有研究表明,用Q準則[31]來判別渦的結構具有較高的精細度和可靠性[32],因此本文利用Q值來判別乘波飛行器背風面產生的旋渦強度,其中,滿足Q值為正的等值面即為渦環.圖16 給出了優化前后的渦強度云圖對比.可以看出,外翼擾動產生的渦較前翼渦形狀更加扁平,同時,由于第二后掠角較小,外翼產生的渦強度更低.相較于初始外形,優化后外形在前緣附近向上凸起,使得渦結構向外側平移,且更加貼近物面,前翼與外翼產生的渦強度均有小幅增強.同時,優化外形背風面在底部附近也出現強度較小的渦結構,從而使得背風面靠近對稱面處的壓力有所降低.
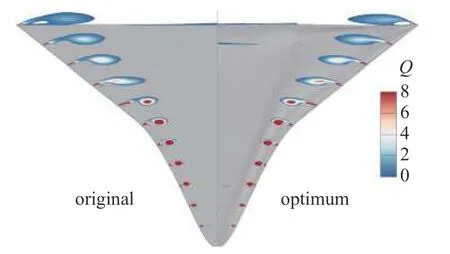
圖16 優化前后渦強度對比Fig.16 Comparison of Q value before and after optimization
針對優化前后壓力變化明顯的區域,進一步開展流場分析.圖17 給出了優化前后底部附近的渦強度云圖對比,圖18 給出了優化前后Q=2等值面圖.可以看到,由于優化外形型面的變化,其背風面產生了強度較小的渦結構,在靠近對稱面處也形成了一個低壓區,會額外提供一部分升力.從Q=2等值面圖可以觀察到,初始外形自機頭拖出的前緣渦(第一后掠角)與第二后掠角之后的外翼渦并未完全交匯,而優化外形的頭部前緣渦與外翼渦更加靠近前緣,且兩者與前緣處的分離氣流完全交匯并相互纏繞在一起,前緣渦中的流速更快.因此,優化外形產生的前緣渦具有較高的強度,其表面壓力也相對較低.
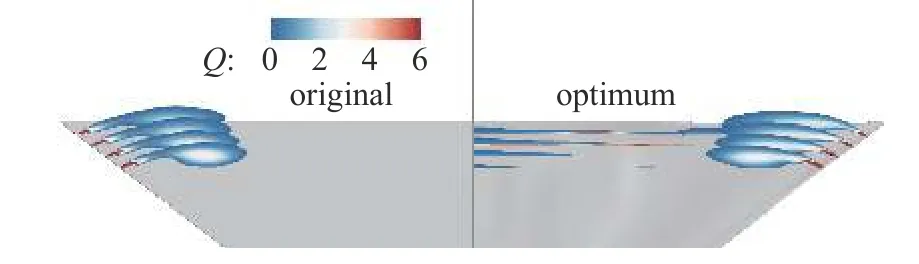
圖17 壓力變化明顯處渦強度對比Fig.17 Comparison of Q value in the area of obvious pressure change
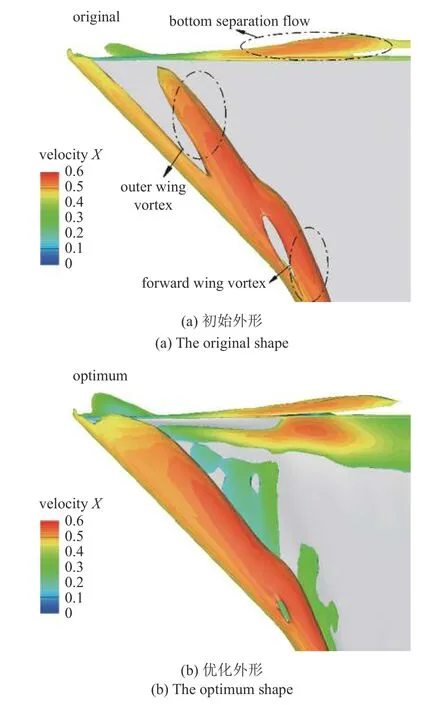
圖18 優化前后 Q=2 等值面速度云圖Fig.18 Iso-surface of Q=2 before and after optimization
圖19 給出了背風面壓力明顯變化區域的流向各截面位置,圖20 給出了X=3.5 m 至X=3.8 m 截面處的表面壓力系數分布和外形對比.可以看出,在優化外形的中后部,其靠近對稱面處的背風面均有不同程度的上凸.由于型面的變化,對附近的氣流產生擾動,氣流速度加快,即上文提到強度較小的渦結構,因此,優化外形背風面在該區域的壓力較小.另外,優化外形靠近前緣處的背風面出現下移,導致外翼渦更加靠近前緣,吸力峰值也向外側移動,同時,由于前緣渦具有較高的強度,優化外形的表面吸力峰值也更高.
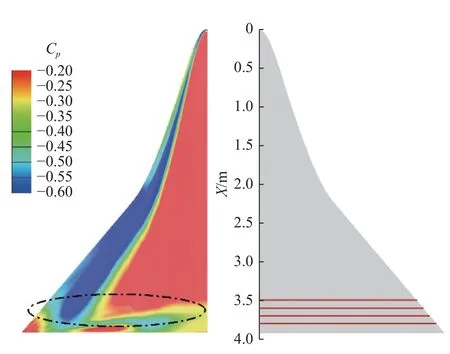
圖19 壓力明顯變化區域流向各截面位置Fig.19 Four new stations in the area of obvious pressure change
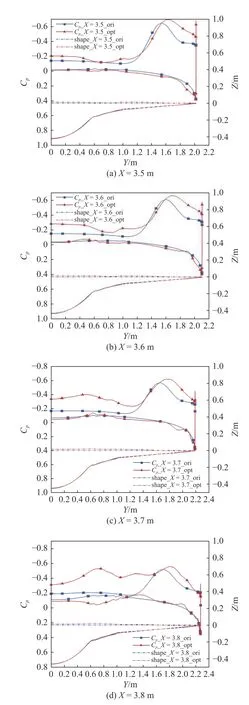
圖20 優化前后流向各截面表面壓力系數分布與幾何外形對比(H=0 km,Ma=0.4)Fig.20 Comparison of the Cp distribution and shape before and after optimization (H=0 km,Ma=0.4)
綜上所述,在低速狀態下優化后外形背風面產生的旋渦強度較強,背風面壓力明顯下降,迎風面壓力增加,尤其是靠近底部的區域.因此,優化后外形在低速狀態下的升力及升阻比均提升明顯.
圖21 給出了寬速域優化外形與初始外形升阻比隨迎角的變化情況.可以看出,相較于初始外形,優化外形背風面的旋渦效應進一步增強,使得飛行器在低速中小迎角狀態的升阻特性得到明顯提升.但是,在大迎角狀態,寬速域優化外形的阻力略微增加,導致優化后升阻比增量有所減小,后續工作將進一步開展考慮低速大迎角性能的寬速域氣動優化設計研究.
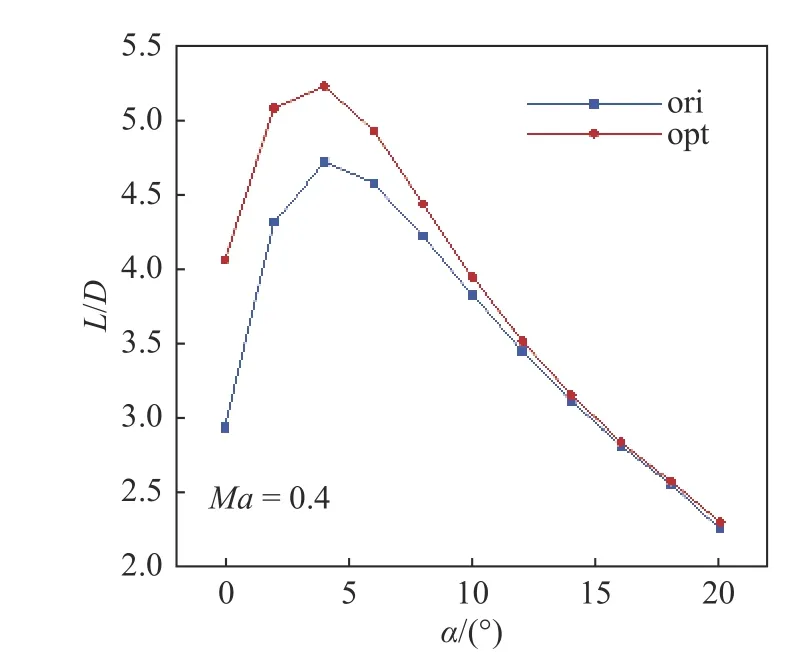
圖21 優化前后低速升阻比隨迎角變化Fig.21 The lift drag ratio with angle of attack at low speed before and after optimization
4.2.2 高速流場分析
圖22 和圖23 分別給出了渦波一體寬速域乘波飛行器優化前后高超聲速迎風面壓力系數和空間流場對比.可以看出,初始外形在前緣線附近存在明顯的高壓區,且在第二后掠區域的類似外翼翼根部位也存在大片高壓區.相較于初始外形,優化后外形使得頭部前緣線附近的高壓區域轉移到了中間附近,同時在第二后掠區域外翼翼根附近的高壓區范圍有所減少.但優化外形在靠近底部的外翼段壓力有所提升,因此,優化外形的升力特性并沒有明顯下降.由于該乘波飛行器初始外形是基于二維無黏理論假設設計得到的,并對前緣進行鈍化處理,因此,其在進行黏性計算后前緣會出現不同程度的溢流.而優化后的外形抑制了背風面前緣附近的溢流量,特別是在外翼段,前緣處的高壓氣流能更好地被限制在迎風面.
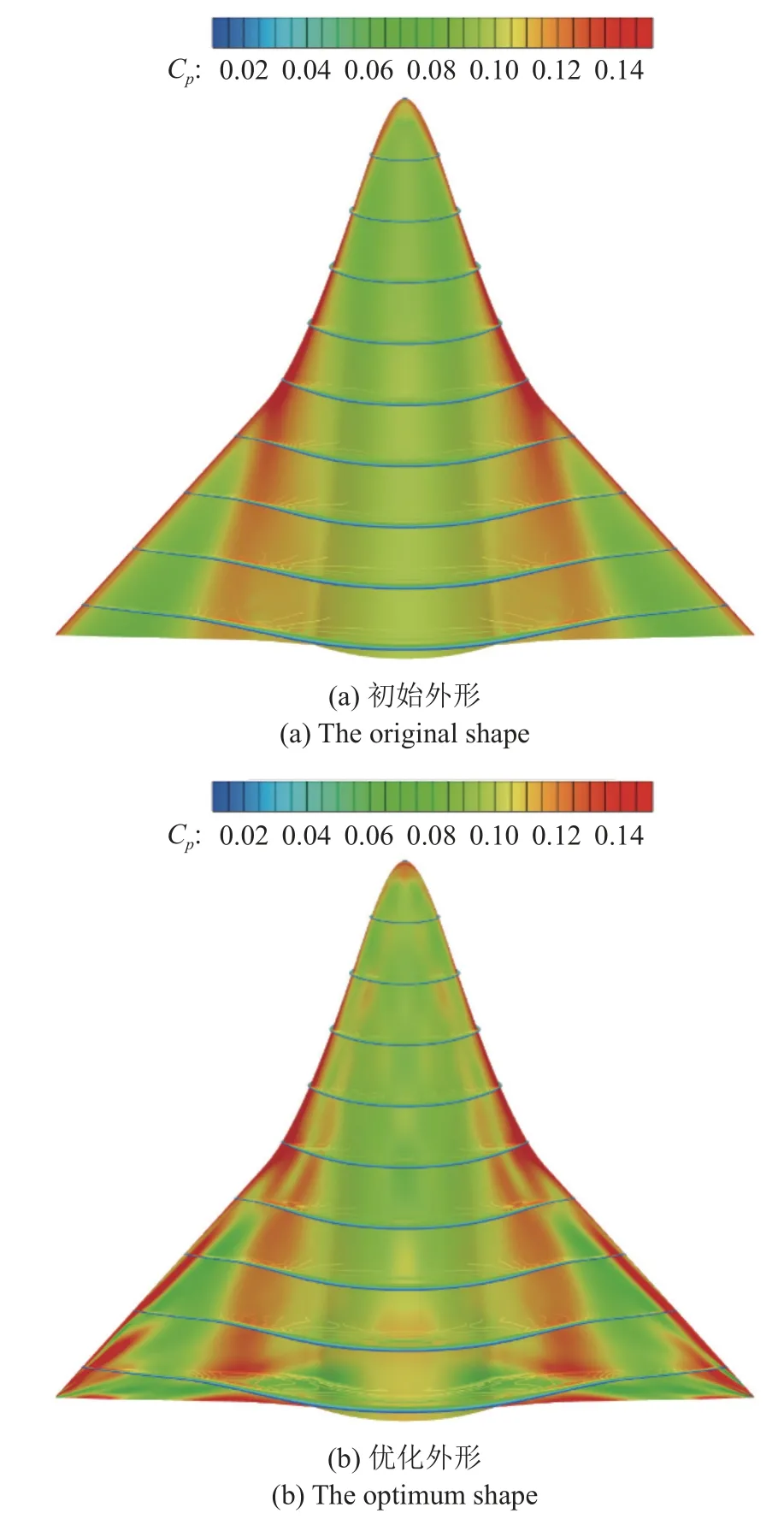
圖22 優化前后迎風面壓力分布對比(H=30 km,Ma=5.0)Fig.22 Comparison of Cp distribution on the lower surface before and after optimization at high speed (H=30 km,Ma=5.0)
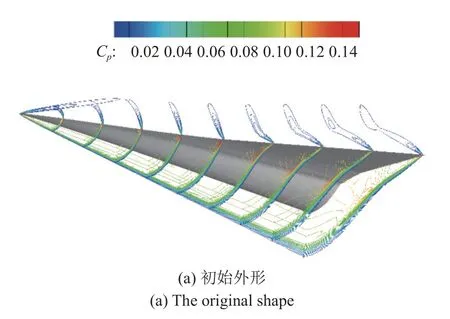
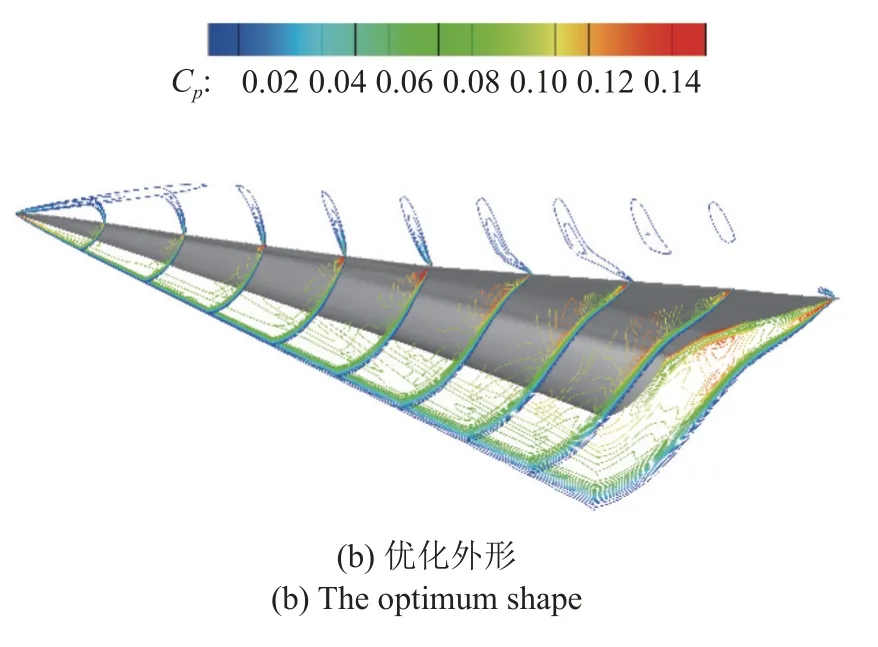
圖23 優化前后空間流場對比(H=30 km,Ma=5.0)Fig.23 Flow field changes of the wide-speed-range waverider before and after optimization (H=30 km,Ma=5.0)
圖24 給出了優化前后高超聲速下流向各截面處表面壓力系數分布曲線和外形對比.通過表面壓力系數分布曲線和外形對比同樣也可以發現,在第一后掠頭部附近,優化后外形在靠近前緣處,雖然迎風面相對上移,但背風面同時也有所上凸,因此物面角仍相對較大,激波強度依然較強,導致壓力有所增加.在雙后掠乘波體的中后部,由于優化后型面的局部變化,在類似翼根處迎風面出現局部膨脹波和二次激波,使得底部附近迎風面壓力有所增加,對升力特性進行補償.綜上,相較于初始外形,優化后外形雖在迎風面局部壓力有所下降,但整體來看,其在高超聲速下的升阻特性仍有小幅提升.
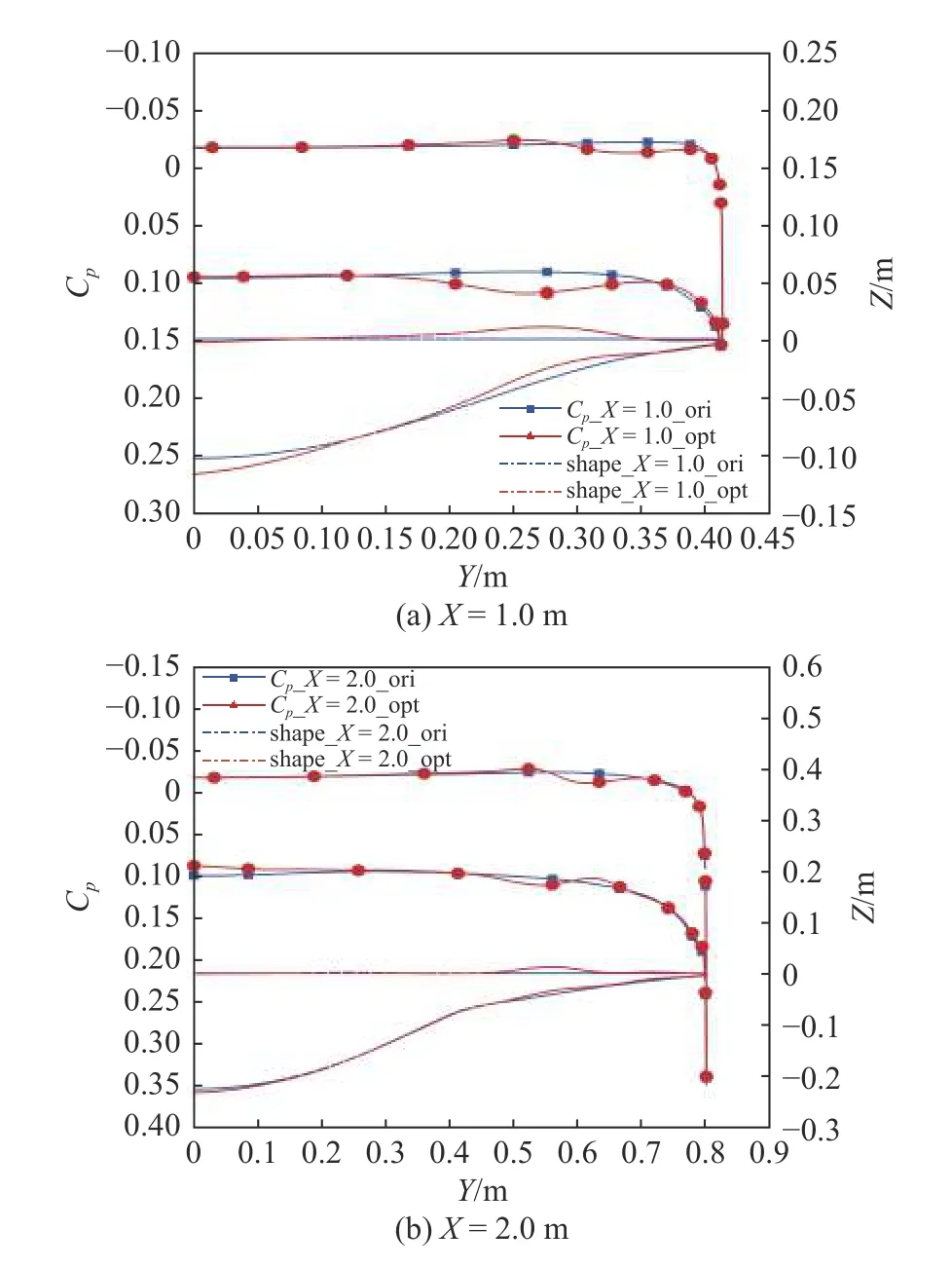
圖24 優化前后流向各截面表面壓力系數分布與幾何外形對比(H=30 km,Ma=5.0)Fig.24 Comparison of the Cp distribution and shape before and after optimization (H=30 km,Ma=5.0)
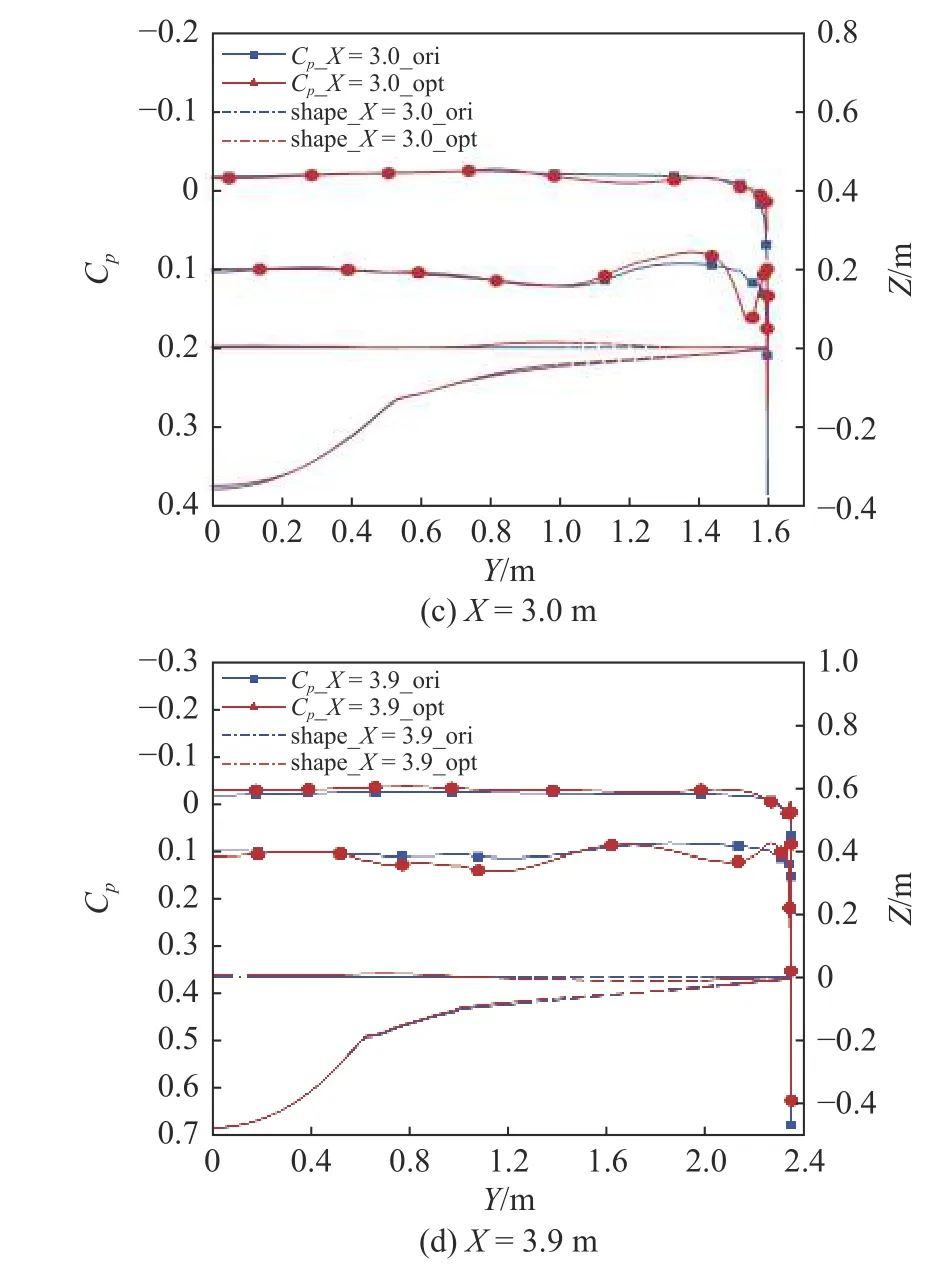
圖24 優化前后流向各截面表面壓力系數分布與幾何外形對比(H=30 km,Ma=5.0) (續)Fig.24 Comparison of the Cp distribution and shape before and after optimization (H=30 km,Ma=5.0) (continued)
5 結論
針對三維復雜飛行器整機的寬速域氣動設計問題,本文在現有的基于離散伴隨的高超聲速飛行器氣動優化設計平臺的基礎上,發展得到了魯棒高效的寬速域氣動伴隨優化設計方法.基于該方法,針對渦波一體乘波飛行器開展了兼顧低速和高超聲速氣動性能的寬速域三維整機優化設計研究.研究結論如下.
(1) 針對渦波一體乘波飛行器的寬速域氣動優化設計表明,伴隨優化方法在針對大規模設計變量的寬速域飛行器開展氣動優化時仍具有較高的效率,具體為,在低速和高超聲速兩套多塊結構網格(網格量分別為400 萬和210 萬),870 個設計變量以及304 個設計約束條件下,該方法僅花費1680 CPU(2.40 GHz)小時即完成多速域的整機氣動優化設計.
(2) 渦波一體乘波飛行器在寬速域優化后,可以在保持高超聲速狀態良好的氣動性能前提下,低速狀態的升力與升阻比有明顯提升,均提升了10%以上.
(3) 低速狀態下,優化外形使得前緣渦向外側移動,外翼的擾動更強,進一步增強了渦波一體乘波飛行器的旋渦效應.同時,底部前緣渦向內側擴展,在靠近對稱面處也產生較弱的旋渦,造成背風面低壓區面積更大.此外,迎風面底部附近的低壓區范圍也得到改善,從而使得低速下的升力大幅提升.
(4) 伴隨優化方法可有效應用于寬速域飛行器的氣動優化設計研究,研究結果具有一定的工程指導意義.
相對初始外形,寬速域優化設計得到的氣動外形型面出現凹凸變化,使得低速大迎角下的阻力增加,優化收益有所下降;此外,其對結構熱防護與彈性設計也會帶來一定難度.后續研究工作中,將進一步開展考慮低速大迎角性能的寬速域優化設計以及評估寬速域優化外形的熱環境與彈性變化.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16