基于FLUENT的無人機旋翼流體力學分析
2023-03-01 08:04:42凌遠志王同發張代元周盧婧秦建華
電子制作 2023年2期
凌遠志,王同發,張代元,周盧婧,秦建華
(桂林理工大學 機械與控制工程學院,廣西桂林, 541004)
0 引言
隨著無人機技術日趨成熟,許多行業將其作為技術革新的手段[1~2]。但無人機工作時容易受環境因素影響,尤其在受到勁風的情況下,無人機無法保持穩定的飛行狀態。無人機的飛行依靠旋翼高速旋轉為其提供動力,旋翼設計的優良程度直接影響到無人機飛行的穩定性。國內外許多高校及企業采用了不同方法研究無人機飛行穩定性,其中大多通過拓撲優化的方法優化無人機機架,或通過收集數據的方法加入控制算法保持無人機飛行穩定性,但對于旋翼的力學優化較少。
為提高無人機飛行的穩定性,本文以三旋翼無人機旋翼作為研究對象,利用Fluent對三旋翼無人機旋翼進行流體力學分析,為后續優化旋翼結構,提高無人機飛行穩定性提供參考。
1 無人機旋翼的力學模型
影響無人機旋翼流體力學的因素有很多,其中旋翼的形狀、數量、轉速等是其中重要影響因素。由于在分析旋翼力學特性時,無人機機體對流場也產生一定影響,為提高分析的準確性,本文將無人機旋翼搭載在機體上進行分析,建立機體及其旋翼的力學模型。
■1.1 無人機的運行原理
本文以三旋翼無人機作為機體,如圖1所示[3~4],三旋翼無人機具有靈活、輕巧等優點,適合用于旋翼的力學分析。旋翼通過無刷電機帶動分別沿順時針或逆時針方向旋轉,在旋轉過程中產生與空氣相互作用的力矩,空氣受力后同樣產生大小相同、方向相反的力矩反向作用于旋翼上,為無人機提供升力和拉力,當升力和拉力與無人機自重大小相等時,無人機即可實現較為穩定的飛行功能。在飛行時,無人機除需克服自身重力外,常常還需抵御勁風帶來的阻力。但由于無人機飛行時具有一定升阻比,受風時可抵抗一定風阻保持較為平穩的飛行狀態。

圖1 三旋翼無人機模型圖
■1.2 機體的設計
三旋翼無人機機體部分需承擔放置各種控制元件及線路的功能,同時還需考慮機體對氣流的影響。由于扁圓體具有空間利用率高、風阻小等優點,故采用扁圓體作為主體部分結構。為提高仿真分析的精度,建模時常將對氣流影響較小的剛體結構(如支撐部分等)與機體設計為一個整體。橫梁外端與柱體相連,柱體上端為放置旋翼的旋翼座,下端為支撐機體結構的支架。為提高機體對地形的適應性確保無人機可穩定、自由地降落在多種場景,故將支撐腳架設計為環狀矩形。此外,將旋翼座設計在較高處,可減小機體部分對氣流產生干擾,提高飛行穩定性。機體模型如圖2所示。

圖2 機體模型圖
■1.3 旋翼的設計
無人機旋翼(見圖3)影響飛行時氣流狀態,在設計時需考慮旋翼升阻比、翼型的扭矩等因素。利用動量理論、葉素理論等可計算出翼型的拉力和扭矩。升阻比與雷諾數有關,不同雷諾數可為無人機帶來不同的升力系數、阻力系數和升阻比[5]。一般三旋翼無人機在雷諾數較低的范圍內飛行,雷諾數越低,空氣粘性越大,這對飛行穩定性造成一定影響。在經過周密計算后,得出旋翼的弦長、扭轉角等基本參數(見圖4)。旋翼總長約475mm,翼尖處半徑為3.26mm。

圖3 旋翼模型圖
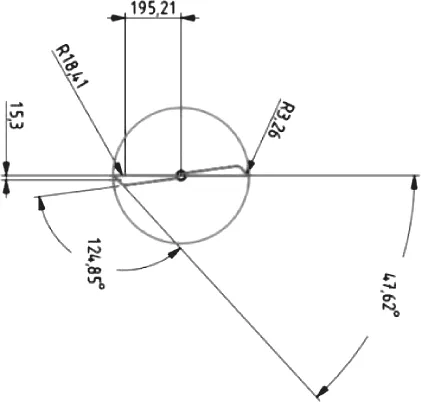
圖4 旋翼參數圖
■1.4 旋翼的動力學分析
設置旋翼1為逆時針旋轉,旋翼2、3順時針旋轉,如圖5所示,三旋翼關于中心旋轉軸對稱分布,可為飛行過程帶來更穩定地升力。當旋翼轉速達3680rpm時,可得總升力約為56.87043N。由于三旋翼無人機質量較輕,該升力可基本滿足無人機克服重力及風阻的需求[6]。
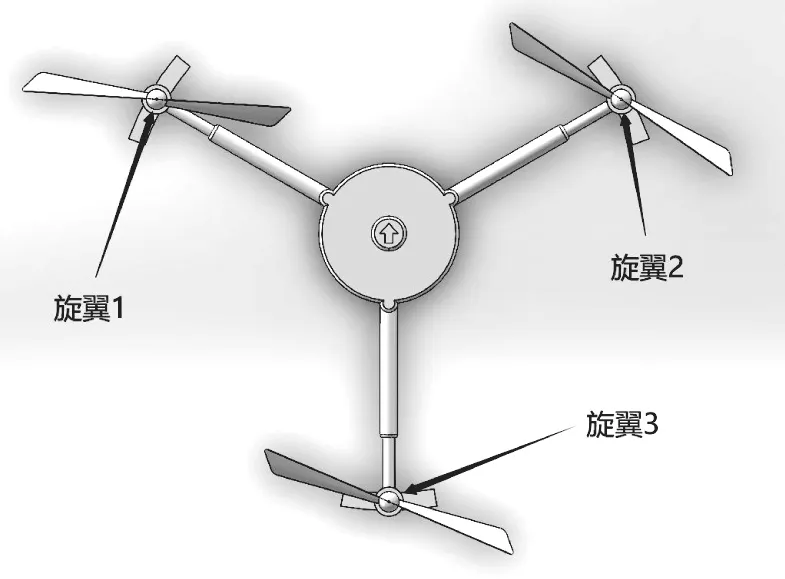
圖5 無人機旋翼圖
2 旋翼流體力學仿真及結果分析
■2.1 模型參數設置及網格劃分
為確保仿真結果與實際情況相符,仿真時需將旋翼搭載在無人機機體上一同劃分網格并仿真。為提高網格質量,仿真時可將機體模型進行簡化,并將簡化后的模型導入Ansys/Static Structural模塊。
在Static Structural模塊中設置材料參數,通過參照常見無人機材料及其屬性并經過不斷調試并計算,檢查計算后總形變量分布云圖與等效應力云圖,考慮到重力與升力的二力平衡條件。最終將零件材料參數設置為:機體材料密度1000kg/m3,彈性模量4.0e+11Pa,泊松比0.45;旋翼材料密度1000kg/m3,彈性模量1.5e+9Pa,泊松比0.42。
材料參數設置完畢后,進入Model模塊進行重力設置、網格大小設置等操作。網格劃分實質是將模型劃分成許多小網格,每個網格均遵守經典力學,將龐大的物質分解成許多小的單元,即可在分析時得出每部分網絡受力情況。劃分網格時,可將旋翼與機體分開劃分出不同網格數,旋翼處網格需相對密集,機體部分網格可相對稀疏,這樣可提高計算精度與效率。選擇精度Size Function為Curvature,并定義Max Face Size為1e-2m。選擇完畢后點擊Generate Mesh網格化生成,Mesh生成后Average Box平均表面積為2.8051e-03㎡,Bounding Box Diagonal邊界框對角線為1.63650m,并且最小邊界長度為1.4318e-3m,該網格化模型較為精確。
在Mesh網格劃分生成完成之后,需要選擇該無人機模型的重力作用面并施加重力加速度,在支架下表面上添加固定支點Fixed Support并將其設置為重力作用面,然后添加Standard Earth Gravity,選擇重力加速度方向為-Y軸方向。重力加速度方向選擇完畢后,重力加速度大小設置為9.8066m/s2。設置完畢即可添加等效應力Equivalent(von-Mises)Stress與總形變量Total Deformation計算。等效應力計算結果如圖6所示,總變形量計算結果如圖7所示。由等效應力云圖可知,最大應力值為1.609e+6Pa,最小應力值為14.561Pa,等效平均應力為46845Pa。整體應力分布較為合理,網格劃分適合進行力學分析。通過觀察總變形云圖可知,最大形變量為0.0076037m,最小形變量為0,平均形變量為7.6037e-3m。旋翼處由于受升力作用,相比于其他地方變形量較大,但均處于合理范圍,其他結構形變量接近0,整體形變量分布較為正常,無變形突變,不會帶來結構破壞。
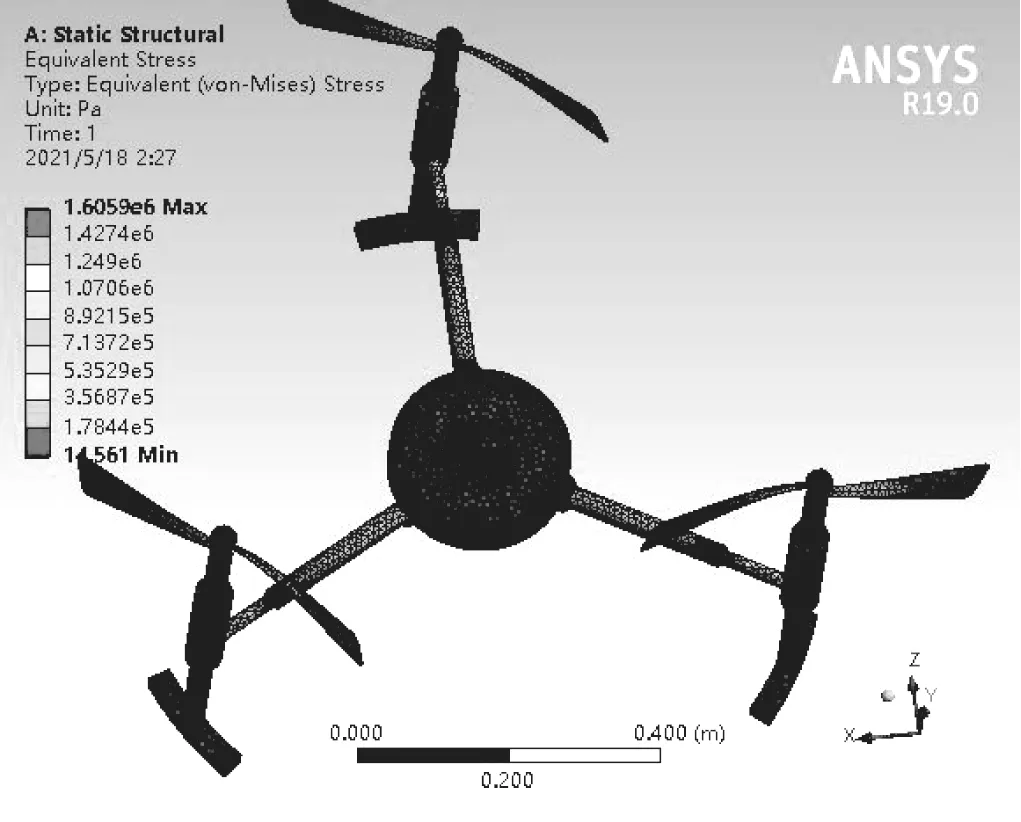
圖6 等效應力云圖

圖7 總變形云圖
經過參數設置及網格劃分后,最終得出該模型質量為5.843kg,重力約為58.43N,體積約為5.843e-3m3,網格數為61256,節點數為103687。為后續仿真分析提供重要保障。
■2.2 約束條件的設置
完成模型參數設置及網格劃分后,進入Fluent模塊進行約束條件設置及運行仿真。首先在Flie中Write/check處設置轉速單位為rpm(轉每分鐘),單位為mm,設置重力加速度為-9.81m/s2(該模型正常靜置時向上為+Y軸方向)然后設置旋轉流域為RNA(湍流,適合旋轉流域使用),其余參數為默認值。旋翼運動采用Frame Motion(框架運動),即三旋翼旋轉過程中相對位置不變。根據右手定則,決定Rotation-Axis Direction旋轉軸方向(即旋翼產生升力方向)該模型運動為X0、Z0,Y=1為逆時針旋向,Y=-1為順時針旋向。
本文采用SIMPIEC算法進行仿真。將梯度Gradient設置為Least Squares Cell Based,壓力Pressure設置為Second Order,推力Momentum設置為Second Order Upwind,湍流動能Turbulent Kinetic Energys 設置為First Order Upwind,湍流耗散率Turbulent Dissipation Rate設置為First Order Upwind,其余參數為默認值[7]。
本文主要研究無人機在懸停狀態時的流體力學情況,因此設置步數為1000,在Boundary Conditions邊界條件中設置六面,即inlet1、inlet2、outlet1、outlet2、up、down為pressure-outlet壓力出口。
■2.3 無風狀態速度分布云圖
由圖8可知,速度分布云圖顏色越偏向于紅色速度較大。在無風狀態,無人機旋翼外端速度最大,最大速度為9.049e+1m/s,最小速度為0m/s;旋翼旋轉中心處速度最小。這說明最大流速集中于葉片末端,相同角速度下葉片長度越長,末端線速度越大。在該速度分布下無人機旋翼可以產生與其自身重力相匹配的升力使其較為穩定的懸停在空中,不會出現局部升力跳變的現象。
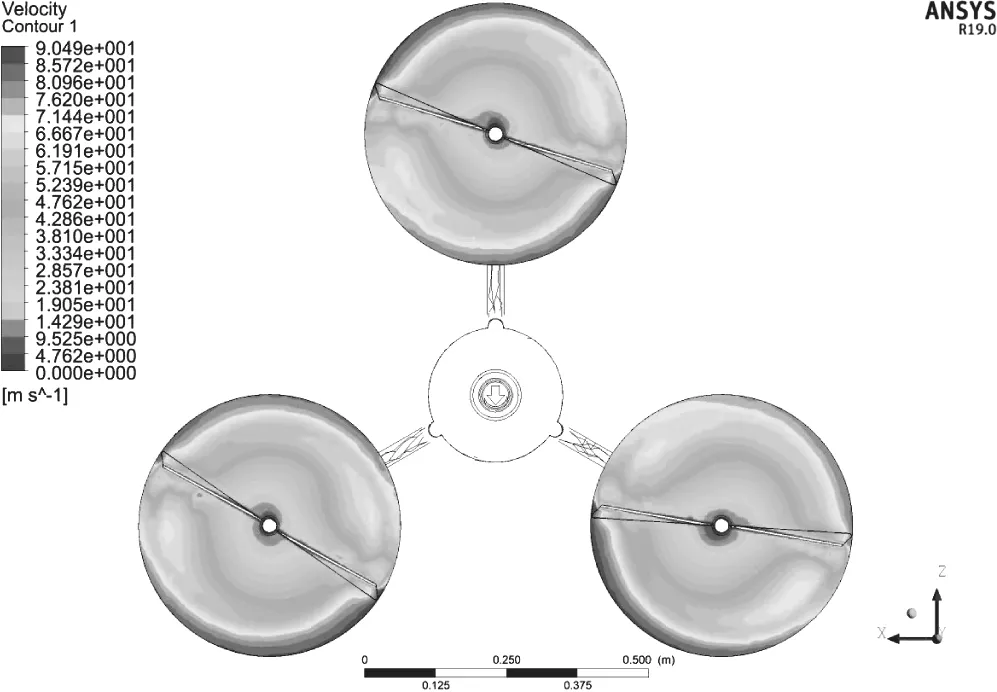
圖8 無風狀態旋翼速度分布云圖
■2.4 無風狀態速度流線分布云圖
由圖9可知,在無風狀態下速度流線分布不夠均勻,相對集中于模型下方,部分氣流流經機身后分散,未出現大的分布偏差。最大值約為7.846e+1m/s,最小值約為6.057e-2m/s。可以看出該三旋翼無人機模型在無風狀態下,流體運動速度較為有序,但氣流分布不均會導致在流場集中處與分散處產生升力波動,影響懸停穩定性。
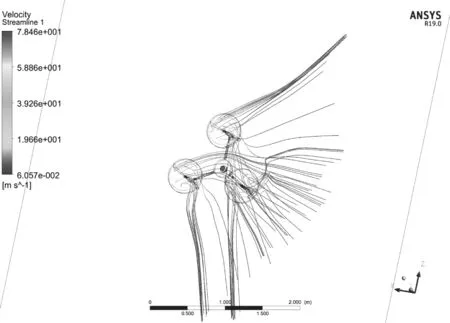
圖9 無風狀態速度流線分布云圖
■2.5 受風狀態速度分布云圖
受風狀態將Boundary Conditions中lnlet1設置為Velocity Inlet速度進口,設置風速為10m/s,并將步數設置為600。由圖10可知,無人機在受到正面勁風的情況下,旋翼處速度變化范圍為最大轉速為9.739e+1m/s,最小為0m/s,變化過程較為均勻沒有產生速度突變情況。旋翼的葉片末端速度最大,旋翼1葉片末端流體速度最大,旋翼3次之,旋翼2葉片末端流體運動速度相對前兩者稍小,這是因為受到正面清勁風來向的影響。從速度分布云圖可看出,在該風速下,旋翼速度受到一定影響,此時必定造成無人機懸停波動,速度最大區域面積與速度最小區域面積發生改變,需通過改變電機轉速保持升力平衡,保持懸停處于較穩定狀態。

圖10 受風狀態旋翼速度分布云圖
■2.6 受風狀態速度流線分布云圖
由圖11可知,無人機在受到正面勁風的情況下,氣流均勻有序地流過無人機機身。大部分氣流流速較為平穩且集中,不會引起機身的大幅度晃動。從圖中觀察發現旋翼與旋翼間有部分氣流在下方和后方產生氣流堆積,這會引起旋翼處壓力變化,造成此處旋翼產生的升力并不能實時與重力相等,影響無人機的穩定飛行。
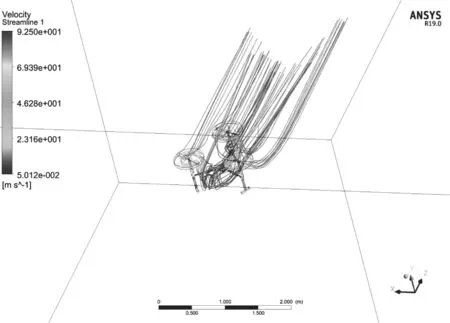
圖11 受風狀態速度流線分布云圖
3 結論
本文通過對無人機旋翼進行流體力學仿真分析,發現在無風狀態下,氣流分布不均造成無人機懸停時輕微振動;在受正面勁風狀態下,無人機旋翼處會產生氣流堆積,造成升力波動影響無人機穩定飛行,無風狀態及受風狀態的流場分布對后續旋翼結構優化具有重要指導意義。
本文基于Fluent的流體力學分析對提高無人機飛行的穩定性具有重要意義,幫助無人機適應更多工作場合的飛行,拓寬其應用途徑,直接或間接為各行業帶來技術革新。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
少先隊活動(2021年4期)2021-07-23 01:46:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
光學精密工程(2016年6期)2016-11-07 09:07:19
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
核科學與工程(2015年4期)2015-09-26 11:59:03
中國艦船研究(2014年5期)2014-05-14 06:43:09