基于BP神經網絡的車輛跟馳模型研究*
2023-03-01 05:25:34王天方劉學淵
南方農機 2023年6期
王天方 , 劉學淵 ,2
(1.西南林業大學機械與交通學院,云南 昆明 650224;2.云南省高校高原山區機動車環保與安全重點實驗室,云南 昆明 650224)
0 引言
隨著人們生活水平和購買力的不斷提高,每個家庭擁有一輛車似乎已經成為一種標配,因此,我國的機動車保有量每年都在大幅增加。然而,汽車在改善人們生活品質的同時,也會帶來相應的交通問題和環境問題。機動車保有量的逐年增加,給有限的道路交通資源帶來了極大的壓力,導致交通事故頻發、道路擁擠等一系列交通問題。特別是在早晚上下班這個特殊時間段,堵車已經成為一種常態化現象。除了交通問題,機動車尾氣排放也對環境造成了嚴重的破壞,主要原因是汽車排放物是污染物的一個主要來源。《中國移動源環境管理年報(2021)》[1]顯示,2020年,全國機動車四項污染物排放總量達到了1 593萬t。無論是交通問題還是排放污染問題都與人們息息相關,如何應對這些問題已成為社會各界關注的焦點。
跟馳行為是城市交通中常見的車輛行駛狀態,其特性對交通和環境有重要影響,所以對車輛跟馳行為的研究,對解決交通問題和排放問題具有很重要的現實意義。早在1950年,人們就開始對跟馳行為進行研究,并提出了一系列模型,如刺激-反應模型[2-3]、安全距離模型[4-5]、心理-生理學模型[6-7]等。雖然這些模型能夠很好地模擬跟馳場景,但是這些模型都是建立在準確的數學公式之上,所以傳統的跟馳模型在實際應用中會受到很大的限制。隨著科學技術的發展,能夠獲取的跟馳數據更多,并且精度更高,使得數據驅動類跟馳模型[8]的研究在近年來得到了一定發展,而且很多學者都對其進行過相關的研究。例如,Zhou等[9]提出了一種基于遞歸神經網絡的跟馳模型,該模型能夠預測和捕捉交通震蕩。孫倩等[10]提出了一種基于長短期記憶神經網絡的跟馳模型,基于該模型進行交通仿真并研究駕駛員的記憶效應影響因素。蔣華濤等[11]將最小安全距離模型與灰色神經網絡結合,提出了灰色神經網絡跟馳模型,該模型能夠提前預知前車未來車速和制動跡象。Hao等[12]提出了一種不包含數學分析的人工智能跟馳模型,該模型能夠精準地模仿人類駕駛員。
在智能化技術高度發展的今天,將跟馳行為融入智能化輔助駕駛系統,對于減輕人們的駕駛壓力并保障交通安全有重要意義。實現這一過程需要準確的數學模型來支撐,但是,在實際駕駛過程中駕駛員受到的影響因素并不唯一,如駕駛員經常會同時受到交通信號、其他車輛和行人的影響。對于這種比較復雜的情況,不能用單一的數學模型進行建模,要使用人工神經網絡等方法來描述。因此,課題組以實際采集的實驗數據為基礎,建立BP神經網絡跟馳模型。
1 實驗過程與數據采集
在本次實驗過程中,使用兩臺實驗車輛,一輛作為前導車,一輛作為跟馳車,在前、后車輛上都安裝全球定位系統(Global Positioning System, GPS),然后通過實驗設備獲取實際道路車輛的跟馳行為數據。實驗道路為昆明市的北京路。選擇的實驗路段為主干道,整體車流量較大,在實驗過程中,為了保證跟馳的真實性,駕駛員將會按照自己在日常生活中的駕駛習慣正常駕駛實驗車輛。跟馳行為數據主要由GPS獲取,GPS可以獲取車輛速度、經緯度、海拔等數據。
2 建立跟馳模型
以實際跟馳行為數據為基礎,選取一個典型且連續的跟車過程,運用BP神經網絡構建跟馳模型。在進行BP神經網絡的設計時,首先需要一個樣本訓練數據集,然后確定模型的輸入輸出參數。將實際道路采集到的跟馳行為數據作為訓練樣本,然后根據獲取的數據提取前車車速V1(km/h)、相對距離Rs(m)、前車對后車的相對速度RV(km/h)和后車車速V2(km/h)作為輸入,后車下一時刻的速度V(t+1)(km/h)作為輸出。輸入、輸出確定之后,需要從以下幾個方面對神經網絡結構進行設計。
2.1 網絡層數
BP神經網絡的層數設計可以根據自己的需求而定,一般單層的網絡就可以滿足大部分的應用,因為只需要增加神經元節的個數就可以完成任意的非線性映射。但是,樣本的數量較多時,可以選擇增加一個隱含層,能夠減少網絡規模并提高輸出精度。所以,本文將建立雙隱含層的BP神經網絡跟馳模型。
2.2 輸入和輸出層節點數
對于BP神經網絡而言,輸入層神經元節點數一般為輸入參數的個數,因為本文選擇的輸入參數有4個,所以輸入層的神經元個數為4。輸出層節點數和輸入層類似,根據輸出參數個數確定,因此輸出層的神經元個數為1。
2.3 隱含層節點數
隱含層節點數一般是根據試湊法得出選取范圍,然后根據訓練時不同神經元對模型的影響,選出最佳個數。確定神經元個數的主要公式如下:
式中:n為輸入層神經元個數,m為輸出層神經元個數,M為隱含層神經元個數,a為[0,10]之間的常數。公式(1)是比較常用的經驗公式,第一隱含層根據試湊法確定神經元個數為6;第二隱含層神經元個數等于輸出節點數時,模型的預測效果較好[13],因此第二隱含層神經元個數設置為1。BP神經網絡跟馳模型的結構為4-6-1-1。
2.4 傳遞函數和學習算法
BP神經網絡的傳遞函數可以使用線性函數或Sigmoid函數,文中隱含層的傳遞函數選擇Sigmoid函數,輸出層選擇線性函數,因為如果輸出層選用Sigmoid函數會限制輸出數值的范圍。
標準的BP網絡使用的學習算法是最速下降法,也稱為梯度下降法,采用最速下降法對網絡的權值進行調整的過程,是一個沿著網絡逐層反向調整的過程,具體為先對輸出層和隱含層的權值進行調整,然后再對隱含層與輸入層之間的權值進行調整。在實際使用最速下降法訓練的過程中,會存在收斂速度慢的問題,針對最速下降法的這個缺點,提出了LM(Levenberg Marquardt)算法。LM算法是在最速下降法的基礎上改進而來的,同時具有擬牛頓法的局部收斂特性和最速下降法全局特性,因此在本次建模過程中,選用LM算法作為學習算法。LM算法調整網絡權值的公式為:
式中,J是雅克比矩陣,I是單位矩陣,μ是比例系數,且μ>0。
在確定了上述參數之后,將需要訓練的數據進行歸一化處理,然后輸入模型中進行學習和訓練。
3 跟馳模型的優化
利用遺傳算法(Genetic Algorithm, GA)來優化BP神經網絡,即優化神經的初始權值和閾值,可以避免BP神經網絡在訓練時容易陷入局部最優的缺點,同時提高網絡對樣本的預測能力。許多研究者都使用了遺傳算法優化BP神經網絡,如郭艷君等[14]利用遺傳算法優化BP神經網絡跟車模型,表明GA在優化神經的初始權值和閾值方面有較好的效果;王志紅等[15]利用GA優化BP神經網絡排放預測模型,也取得了較好的預測效果。GA的具體操作步驟如下。
1)初始化種群[16],種群規模為40。采用浮點編碼對個體進行編碼,因為浮點編碼能夠解決二進制編碼中編碼串過長的問題,計算得到編碼長度為38,計算公式如下:
式中,n為輸入層神經元個數,m為輸出層神經元個數,M1和M2分別為第一、第二隱含層神經元個數。
2)適應度函數。適應度函數表示預測輸出與期望輸出之間的誤差絕對值,公式如下:
式中,yi為i節點的期望輸出,xi為i節點的預測輸出,n1為節點數,a為系數。
3)選擇操作。本文使用經典的輪盤賭法,根據個體適應度大小,對個體進行選擇操作,每一個個體被選擇的概率計算公式如下:
式中,fi為個體i的適應度值,m1為種群中個體總數。
4)交叉。從選擇好的個體中對其進行基因互換,即交叉操作,產生下一代。交叉概率控制著個體之間發生交叉概率的大小。一般交叉概率為0.4~1,本文設定的交叉概率為0.8。
5)變異。對交叉之后的個體以一定的概率使其發生變異,從而產生新的個體。其中,變異概率決定變異發生的可能性,變異概率一般為0.001~0.1。本文設定的變異概率為0.02。
6)當算法運行結果達到最大的精度要求或者最大的迭代次數時,結束遺傳算法操作過程,然后需要把優化好的權值和閾值帶入BP神經網絡進行訓練[17]。
4 模型結果分析
4.1 評價指標
以標準均方根誤差(NRMSE),平均絕對百分誤差(MAPE)和決定系數(R2)作為評價指標。NRMSE反映了模型輸出值與實際值之間的差異性;MAPE是衡量預測模型精度的一個重要指標;R2代表模型的非線性擬合性和預測精度。計算公式如下:
式中,yi表示實驗值,表示模型輸出值,表示實驗值的平均值,N為測試集樣本數量。
4.2 模型結果
將從實驗中采集到的數據分別輸入到上述建立的BP神經網絡和遺傳算法優化后的BP神經網絡跟馳模型中進行訓練和預測,結果分別如圖1和圖2所示。

圖1 BP神經網絡模型
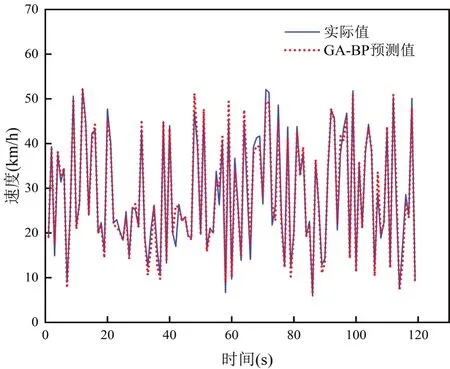
圖2 GA-BP神經網絡模型
從圖1和圖2中可以看到,BP神經網絡模型和GA-BP神經網絡模型的預測值基本都能捕獲實際值的變化趨勢,雖然在圖中可以發現極值點部分預測可能相對較差,但是整體趨勢預測依然準確。對比BP神經網絡模型和GA-BP神經網絡模型,從圖中可以明顯看到GA-BP神經網絡模型具有更好的預測性能,預測值與實際值的誤差也相對較小。由此可見,利用遺傳算法對BP神經網絡的權值和閾值進行優化,能夠使模型達到更好的預測效果[18-19]。
為了進一步分析模型預測偏差,根據模型預測的結果計算模型性能的評價指標值,具體結果如表1所示。從表中可以看到GA-BP神經網絡的評價指標NRMSE、MAPE和R2都優于BP神經網絡模型,具體為NRMSE和MAPE分別降低了20.83%、37.83%,R2提高了3.16%,表明GA優化了BP神經網絡的效果。

表1 模型性能評價指標
4.3 模型誤差分析
為了對模型的預測偏差進行分析,把實際值減預測值定義為模型的誤差。在實驗中,用實際值減去BP神經網絡模型和GA-BP神經網絡模型的預測值,結果如圖3所示。
從圖3中可以看到,GA-BP神經網絡模型相比BP神經網絡模型,誤差更加集中分布在零誤差線左右,偏移相對較小。由此可知,建立的GA-BP神經網絡模型比BP神經網絡模型擁有更好的泛化能力和預測性能,能較好地對跟馳行為進行預測。
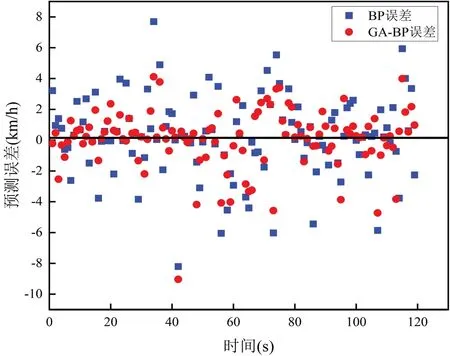
圖3 預測誤差對比
5 總結
課題組以真車實驗采集到的數據為基礎,先使用BP神經網絡構建跟馳模型,然后再使用GA對BP神經網絡跟馳模型進行優化,結果表明,構建的GA-BP神經網絡模型性能的評價指標、預測誤差都要優于BP神經網絡跟馳模型。所以,利用GA優化BP神經網絡模型,能夠有效地提高BP神經網絡跟馳模型預測結果的準確率。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19