基于九點標定機械臂抓取的設計及應用★
2023-03-01 06:54:46孫浩洋卞科琪魏翱翔孔慶峰
現代工業經濟和信息化 2023年1期
關鍵詞:機械
孫浩洋,曹 彥,卞科琪,魏翱翔,孔慶峰
(中國礦業大學徐海學院,江蘇 徐州 221000)
引言
隨著科學技術的不斷進步,機器人正向著協作化、自動化、網絡化以及智能化方向發展,為保障機器人作用的精準高效,機器視覺技術成為持續關注的熱點,并得到廣泛應用。傳統的物體分揀過程受物件特征的影響較大,導致搬運效果低,分揀錯誤率高。使用視覺技術的機器人能提高速度、增加信息量的貯備,并且能避免人工操作帶來的誤差,因此,機器視覺技術在分揀領域具有良好的應用前景。本文主要研究基于九點標定算法分揀機器人的組成關鍵技術及其技術優勢,針對抓取過程中出現的問題提出了可行性解決方案,為物流分揀機器人關鍵技術提供一些參考。
1 分揀系統總體設計
對于目標識別和機械臂分揀控制,分別采用機器視覺技術和關節型機械臂來完成任務。總體設計思路為:由OpenMV采集圖像信息,STM32接收到傳輸信號,將算法處理后的傳輸動作信號傳輸給舵機,6個舵機控制機械臂按照指令完成相應的動作。
圖1所示為機械臂控制流程:機械臂主控板接收到夾取命令后,利用OpenMV識別目標物體,并將目標物體坐標經過坐標轉換,進行九點標定,通過串口發送到機械臂控制板,機械臂控制板進行逆運動學解析,計算出每個舵機對應的PWM值,完成目標物體的夾取。

圖1 機械臂控制流程圖
2 機械臂設計
2.1 機械臂運動學原理
為了完成機械臂對目標物體的夾取和放置任務,需要進行機械臂的運動學分析。機械臂運動學研究各關節運動與機械臂末端執行器位姿之間的關系,主要包括正向運動學和逆向運動學。正運動學解析是已知機械臂各連桿參數及關節變量,解算出末端執行器的姿態。逆運動學解析是已知末端執行器的姿態,求解要設置的關節可活動對象的參數[1]。
使用笛卡爾坐標系描述空間位置,使用右手坐標系,即繞z軸旋轉時,y軸在x軸的+90°方向,一般將物體的名稱寫在右下角,如坐標系{A}中點O的位置向量寫作ApO[2]。描述物體在坐標系中的位置,可以描述為坐標系之間的關系。二維變換如圖2所示,圖中描述了一個坐標系相對于另一個坐標系的關系。
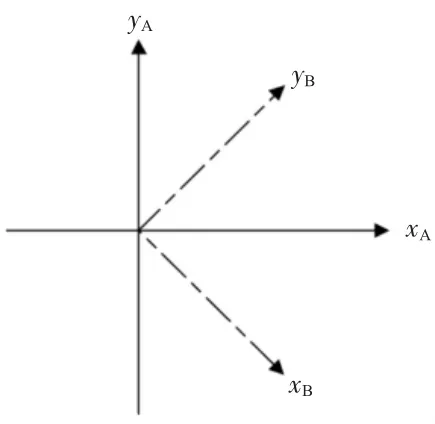
圖2 二維坐標系變換
可以將坐標軸單位向量用參考坐標系表示定義一個2×2的矩陣:
空間三維朝向,按照圖2的方法,寫出旋轉矩陣R:
2.2 機械臂硬件設計
2.2.1 機械臂選型
機械臂按不同的結構形式,可以分為直角坐標型機械臂、圓柱坐標型機械臂、球坐標型機械臂和多關節型機械臂[3]。本文選用的關節型機械臂如圖3所示,結構最緊湊,具有更強的靈活性,而且價格相對較低。其中,云臺選用大扭力的1501舵機,末端執行器選用的是LDX-335MG數字舵機,該舵機具有防堵轉功能,當堵轉時間超過4 min時,舵機停止工作,防止調試過程中因誤操作導致舵機損壞,6個舵機均為高精度的數字舵機。

圖3 六自由度機械臂
2.2.2 機械臂主控板設計
機械臂主控PCB實物如圖4所示,其工作任務主要是串口接收OpenMV目標識別發送的數據、并對目標物的坐標進行數據處理、逆運動學分析,并求解各個舵機所需要旋轉的角度和對應的PWM值,驅動舵機快速準確地夾取目標物體、通過串口接收到放置信號將夾取的目標物體放置到規定位置。主控部分采用STM32F103C8T6系列單片機作為核心控制,此款單片機內置資源豐富,可靠性高,同時還具有豐富的接口資源。

圖4 機械臂主控PCB實物圖
1)USART接口:實現板間通信。
2)AD采集接口:檢測采集電壓是否滿足需求。
3)普通I/O接口:點亮LED燈來顯示機械臂運行狀態。蜂鳴器電壓過低提醒。
4)定時器接口:分時控制6個機械臂。
3 目標識別
3.1 九點標定算法
手眼標定根據攝像頭與機器人的位置不同,分為Eye-to-Hand和Eye-in-Hand兩種方式。Eye-to-Hand關系的攝像頭安裝在固定位置,不隨機械臂的運動而改變位置,Eye-in-Hand關系的攝像頭安裝在機械臂末端執行器上,機械臂運動攝像頭坐標系也隨之變化[4]。本文要識別靜態規則的幾何體,采用Eye-to-Hand系統,攝像頭安裝在固定操作臺上,進行采集圖像信息,經過圖像處理后進行目標物識別,確定相對于機械臂坐標下目標物的坐標,由STM32開發板發送控制信號,控制機械臂完成搬運任務。選取的標定的方法為九點標定法。
九點法手眼標定流程包括兩個部分,一部分是標定板中靶點在機器人坐標系下坐標的獲取,一部分是標定板中靶點像素坐標的獲取。攝像頭在放置好標定板后獲取一張標定板圖像,通過相應的圖像處理,得到靶點的像素坐標。標定板上以機械臂底座中心為原點,繪制機械臂坐標系,靶點在機器人坐標系下的坐標,可以由標定板直接獲取[5]。具體流程如圖5所示,首先進行圖像讀取,然后計算中心點,同時獲得機械人坐標記錄,最后通過轉換矩陣計算得到參數,完成標定。

圖5 標定流程
3.2 目標識別程序
識別目標物體時OpenMV IDE如圖6所示,首先進行感光原件的初始化Sensor.reset(),選擇色彩模式sensor.RGB565,設置相機模塊的分辨率大小為320×240,防止顏色失真,關閉白平衡和自動增益。初始化串口4,與STM32進行串口通信。只需要傳輸待識別物坐標,直接輸出字符串即可。設置檢測色塊閾值,調用find_blobs()函數,將所得到的坐標帶入手眼標定所得到的公式中,轉換為相對于機械臂坐標系的坐標,調用uart.write()函數進行數據傳輸。
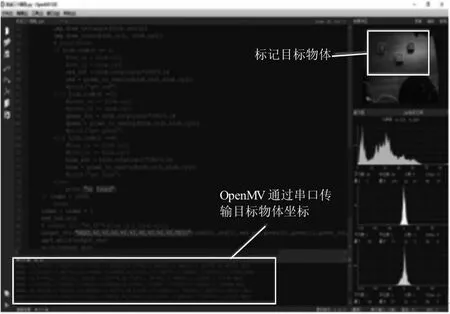
圖6 目標物體時OpenMV IDE運行情況
分揀動作程序由追蹤和抓取兩部分組成。當系統接收到分揀指令時,工作區域將被OpenMV檢測是否有物塊存在,初始檢測次序為紅、藍、綠。若要切換檢測次序,需要對單片機發出切換次序指令,或者對內部檢測部分程序進行修改。如果物塊被檢測到,則可以進行追蹤動作,OpenMV會記錄物塊坐標發送給STM32,STM32接收后將其轉換成機械臂坐標發送給機械臂,機械臂根據坐標追蹤到物塊。當完成對物塊的追蹤后,則對物塊進行抓取。若在程序中設定了指定坐標,則在完成抓取后將物塊放置在相應位置。相關流程如圖7所示。

圖7 程序流程圖
4 系統測試
為了驗證分揀系統操作的效果,選取三種不同顏色的正方形物體放入系統的工作區域內,讓系統對不同顏色、位置的目標進行分揀操作,最終實現對系統分揀成功率和分揀精度的測試。具體測試過程如圖8所示。

圖8 系統測試過程
4.1 分揀成功率測試
每次分別對3種不同顏色的物塊進行分揀并記錄測試數據,測試結果如表1所示。

表1 測試數據
對表1的實驗結果進行對比和分析,發現在物塊顏色區分度明顯的環境下,采用九點標定法,具有更好的目標識別性。這是由于機器視覺算法與機械臂相結合,對物塊有更多的描述和刻畫,更好地實現對物塊的識別,達到預期目標。
4.2 分揀精度測試
以夾取紅色物塊為例,多次對物塊進行分揀操作,每次將物塊位置隨機放置并記錄測試數據。從中隨機抽取8組數據,如表2所示。

表2 測試數據
對表2的數據進行分析,可以看出,基于九點標定法的機械臂抓取系統,對任意放置在機械臂目標區域下的物體,能夠比較精確地獲取其坐標值,進而實現成功抓取。
5 結語
本文采用九點標定法完成機械臂分揀系統的設計,該系統成功完成了數據檢測、目標追蹤和控制機械臂分揀等功能。經測試,對任意放置在機械臂目標區域下的物體,能夠準確地獲得其坐標值,進而實現抓取功能,完成對目標的分揀,改善了因物體位置解算不準確,抓取錯誤的情況。系統調試方便,操作簡單,可移植性好,具有一定的實用價值。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09