架空輸電線路無人機運維巡檢技術研究
2023-03-01 06:55:10丁楠
現代工業經濟和信息化 2023年1期
丁 楠
(國網江蘇省電力有限公司鹽城供電分公司,江蘇 鹽城 224000)
引言
人們的日常生活和社會活動已經離不開電力的支撐,供電企業為了保證電力的供應數量和供應質量,對電網系統不斷地進行改造和構建。輸電線路作為電網系統中關鍵的電力設施,承擔著電力穩定輸送的作用,其安全性和穩定性直接關系到了電力的輸送質量。由于輸電線路的特殊性,范圍廣、區域地形復雜,電力企業的工作人員對輸電線路的運維和檢修,尤其是對架空輸電線路,做不到全部檢查,傳統的運維檢修已經不能滿足現階段架空輸電線路的要求。隨著科技的發展,無人機出現并運用到輸電線路的運維和檢修中,極大地減輕了電力企業工作人員對架空輸電線路運維檢修的工作量,運維檢修工作效率有了很大提升,降低了架空輸電線路的故障率,有助于促進電網系統朝著智能化、自動化的方向進一步發展[1-2]。
1 架空輸電線路無人機運檢關鍵技術
1.1 自主巡檢技術
早期的無人機應用在架空輸電線路的運維和檢修方面時,是依靠電力企業的地面運檢工作人員對無人機進行遠程操控的。但是不同的運維操作人員對無人機操控的熟練度以及技能方面存在著不確定性,對操作人員的專業技能要求也比較高。即便是同一操作人員在不同的時間段操作無人機獲得的架空輸電線路檢修效果也是不穩定的。因此,無人機對架空輸電線路進行巡檢,必須采用自主巡檢技術。自主巡檢技術的發展目前在電力企業的使用有兩種,即:激光雷達(LiDAR)技術和實時動態高精度定位(RTK)技術,這兩種技術目前使用比較廣泛。激光雷達技術實現了對架空輸電線路信息的快速獲取,采用三維點云數據對飛行線路進行規劃,綜合無人機的飛行狀態參數、姿態數據和無人機本身搭載的激光雷達,實現自主巡航和運維檢修。實時動態高精度定位技術采用的是流動站和基準站的方式進行差分定位,采用這種技術的無人機在進行架空輸電線路的運維檢修時受限于基站之間的距離和網絡傳輸的問題。因此,需要建立多個基站來保證信號傳遞的安全性和穩定性,滿足無人機的自主巡檢。
1.2 作業安全管控
電力企業使用無人機進行架空輸電線路的運維檢修時,為了防止無人機在飛行過程中出現“黑飛“的現象,在無人機上安裝飛行數據記錄器。飛行數據記錄器能夠獨立于無人機進行飛行數據的記錄,且無法被人為更改。飛行數據主要包括飛行時間、地點以及路徑等。通過GPS或者是北斗衛星對其路徑進行記錄,通過數據傳輸將無人機的實時數據傳遞到地面監控平臺,同時為了保證無人機飛行的安全性無人機設置有安全監控,當其飛行數據與允許的飛行數據出現不同時,就會發起報警信息,實現對其作業的全過程監控。無人機巡檢模塊還需要具備對巡檢區域周圍地理環境以及氣候環境進行監測,全方位地考察架空輸電線路的實時情況,對其進行巡檢,并嚴格按照電力企業的巡檢制度和巡檢計劃執行。
1.3 故障定位和缺陷識別技術
架空輸電線路在日常運行過程中經常會受到多方面的因素影響導致其產生故障,架空輸電線路在出現故障時,無人機需要結合電力企業的其他裝置對架空輸電線路的故障情況進行快速了解、分析和判斷。同時,在無人機進行飛行的過程中還要綜合檢修人員的相關信息,關聯相應的作業工單等信息。在發生故障時快速反應,將一次故障縮小到最小范圍。無人機在進行運維檢修時,要對架空輸電線路進行缺陷識別。架空輸電線路的缺陷包括輸電線路、塔干、導地線、絕緣子、基礎以及其他附屬設施。在對這些裝置進行檢查時,無人機要識別其可能存在的缺陷,如架空輸電線路塔可能存在著腐蝕點或者存在著斷裂情況、輸電線路的絕緣層損壞等[3]。
2 運維巡檢無人機應用
2.1 運維巡檢無人機測繪攝像應用
運維巡檢無人機測繪攝像模塊采用的是傾斜攝像方式,傾斜攝像方式利用多臺傳感器以及攝像裝置共同發揮作用[4]。在實際應用時,利用Motoar Sky MS-Q5傾斜攝像系統,該系統具備有垂直方向以及四面傾斜方向,以獲取無人機飛行過程中垂直方向的地面信息以及45°~60°傾斜角之間的地面信息,通過多角度的攝像,獲取完整的地面圖像信息。整套系統如圖1所示。

圖1 運維巡檢無人機傾斜攝像系統
2.2 運維巡檢無人機紅外測溫應用
運維巡檢無人機利用紅外測溫技術能夠對架空輸電線路中產生的輸電線路故障缺陷以及絕緣性進行綜合預判,以達到對架空輸電線路進行預知狀態轉變的效果。運維巡檢無人機的定點懸停,結合紅外測溫儀,能夠對監測點或者是警戒點進行實時測量和監控[5]。運維巡檢無人機的紅外測溫實際應用效果如圖2所示,分別對架空輸電線路的導線部分進行溫度檢測和對絕緣子部分進行檢測。

圖2 運維巡檢無人機紅外測溫實際效果圖
3 運維巡檢無人機應用測試試驗
為了試驗運維巡檢無人機的實際應用效果,對運維巡檢無人機搭載傾斜攝像技術和紅外測溫系統進行系統性測試,通過對測試要求與實際測試數據效果進行比對,說明其實際應用效果。表1為運維巡檢無人機的技術要求。

表1 運維巡檢無人機技術要求
運維巡檢無人機的試驗是對江蘇鹽城某110 kV線路N2—N3段、N3—N4段區域內的導線進行日常巡檢任務,利用運維巡檢無人機發現架空輸電線路存在的安全隱患和缺陷,對架空輸電線路實現高效、高精度的信息采集。獲取到的實際信息如表2所示。
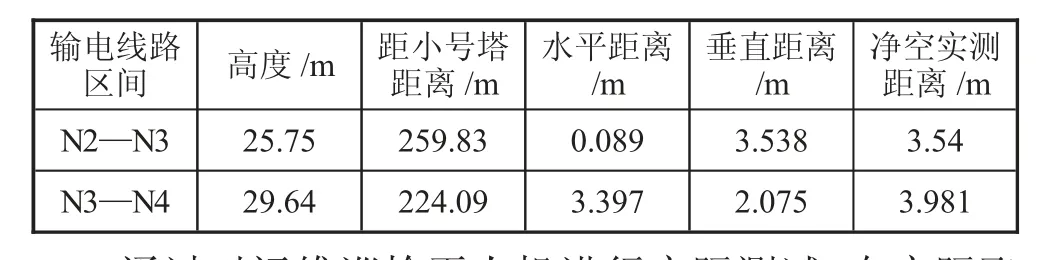
表2 運維巡檢無人機實際測試信息
通過對運維巡檢無人機進行實際測試,在實際飛行過程中能夠較好地獲取架空輸電線路周圍的實際情況以及架空輸電線路距周圍障礙物的距離。同時運維巡檢無人機在實際測試段的懸停精度和RTK定位精度根據測得的距離,達到了運維巡檢無人機的相關精度要求,其定位距離精度更為精準。在實際測試過程中,運維巡檢無人機能夠成功地避開架空輸電線路周圍的障礙物,達到了保障要求。運維巡檢無人機在實際運行中能夠為輸電線路提供有力的安全保障,大大減輕了人工巡線的不足。
4 結語
隨著電網系統的不斷發展,架空輸電線路的運維檢修成為一項非常重要的工作。運用無人機進行運維檢修成為必然選擇。隨著科學技術的發展,無人機在電力方面的應用會越來越廣闊,同時在功能方面也越來越智能化。架空輸電線路無人機的使用改變了傳統架空輸電線路運維檢修工作模式,電力企業工作人員的工作量明顯降低,工作效率大大提高,進一步促進了電力系統朝著智能化、自動化方向發展。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
消費導刊(2018年10期)2018-08-20 02:57:10
能源(2017年9期)2017-10-18 00:48:25
中華手工(2017年2期)2017-06-06 23:00:31
汽車維護與修理(2016年10期)2016-07-10 08:17:41
通信電源技術(2016年6期)2016-04-20 06:21:48
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
中外會展(2014年4期)2014-11-27 07:46:46
河南科技(2014年7期)2014-02-27 14:11:32