一種基于變胞機構的智能藥箱的創新設計
2023-03-03 02:15:26楊鑫孫亮波熊鑫泉
機械 2023年1期
關鍵詞:設計
楊鑫,孫亮波,熊鑫泉
一種基于變胞機構的智能藥箱的創新設計
楊鑫,孫亮波*,熊鑫泉
(武漢輕工大學 機械工程學院,湖北 武漢 430048)
針對現有助老藥箱存在智能化程度不高、功能單一等缺點,無法有效解決獨居老人定時定量吃藥的問題,設計了CareKit助老藥箱,包含常用的液體藥部分、顆粒藥部分、片裝藥部分。液體藥部分采用自適應夾持七桿機構與螺桿螺母組合的變胞機構,實現液體藥瓶的夾緊、傾斜倒藥;螺母旋轉帶動六桿機構實現夾緊瓶蓋、繼續轉動變化為三構件機構實現瓶蓋擰開。顆粒藥部分設計槽輪機構依次實現取藥袋、夾持剪切、傾倒藥袋、杯裝藥退出四個動作。片狀藥部分由雙轉盤結構與風機吸氣配合,按量取出預存的藥片。增設一鍵緊急呼叫以應對老人突發事故。CareKit助老藥箱很好地解決了獨居老人定時定量吃藥問題,具有較好的應用前景。
助老藥箱;變胞機構;自適應夾持機構;模塊化設計
老年人存在不能按時、按量服藥等問題[1]。目前我國市場上的藥盒主要有分裝藥盒、醫療急救箱、智能電子藥盒三種。如圖1所示。其中,分裝藥盒成本低,但智能程度低,功能單一,只提供分開儲存功能;醫療急救箱同樣智能程度低,只是在分類儲存功能上有所優化;智能藥盒在普通藥盒基礎上添加了定時提醒功能,然而對取藥部分沒有涉及,還是需要老人自己去定量服藥。
針對目前市場上藥盒取藥存在的問題,葛杰[2]等通過GSM(Global System for Mobile Communications,全球移動通信系統)無線通訊技術定時提醒老人吃藥,并將藥物分類存儲,當需要時藥物存儲單元才會開放,解決了老人吃錯藥的問題。劉愛斌等[3]通過設置撥盤電機機構,將藥物逐粒輸出完成取藥,從而配齊老人一次需要的藥物,解決了老人吃錯藥、吃多吃少藥的問題。藏家松等[4]采用漏斗凸輪機構實現分藥功能,解決老人定時定量吃藥的問題。但上述三種研究均只針對片狀藥的取用,對于其他種類的藥物沒有涉及。
針對上述問題,運用變胞機構的設計方法和理論,設計了CareKit助老藥箱。通過程序控制完成片狀藥、液體藥和顆粒藥的存取。

圖1 現有藥盒
1 機械系統設計方案
機械變胞機構是指能在瞬時使某些構件發生合并/分離或出現幾何奇異,并使機構有效構件數或自由度數發生變化,從而產生新構型的機構。關于該類機構,人們已進行了多方面的研究[5-8]。
基于對現有藥箱功能和用戶需求的分析,關鍵在于設計一個功能全面、更智能的產品。藥品的種類可分為液體藥、顆粒藥和片狀藥,在確定產品總功能后,對助老藥箱進行功能分解。Carekit助老藥箱主體采用模塊化設計,可分為瓶裝液體藥模塊、袋裝顆粒藥模塊和片狀藥模塊三大部分,以及定時吃藥提醒和緊急情況呼叫這兩個輔助功能。根據功能分析,實現對不同種類藥品的存儲和定量輸出,其機構系統設計思路和三維造型設計如圖2、圖3所示。

圖2 助老藥箱機構系統設計思路
變胞機構能從一種拓撲結構變換到另一種拓撲結構形式,以達到不同工作環境下所需的機構。據此,針對最難實現的瓶裝液體藥取藥,設計了自適應夾持機構完成夾持和傾倒動作,中心變胞機構完成擰瓶蓋動作。

圖3 助老藥箱三維造型設計
2 功能分析與實現
2.1 片狀藥部分
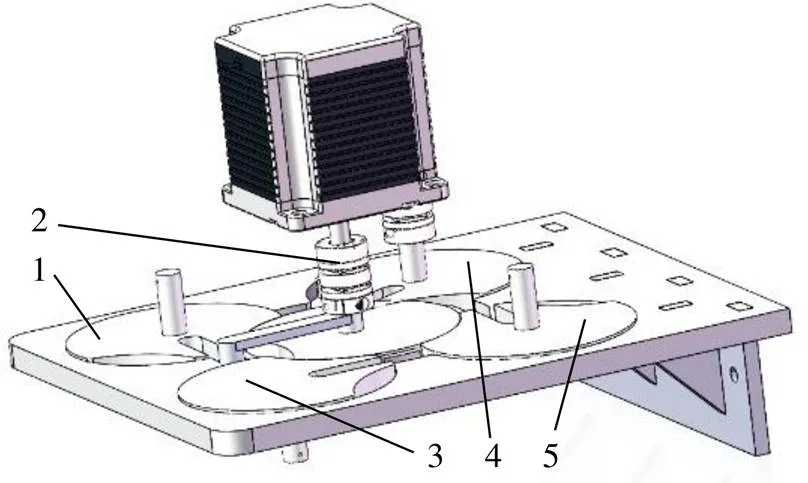
Carekit助老藥箱設計的取片狀藥功能,總體外觀如圖4所示。包括轉盤機構、收納機構和導料管。轉盤機構包括外殼和前轉盤,在前轉盤上形成容納腔,外殼包覆前轉盤,前轉盤與外殼之間為相對轉動的活動連接;收納機構包括暫儲盒;導料管設置在轉盤機構與收納機構之間。
1.立式軸承;2.光軸;3.儲藥盒支架;4.暫儲盒;5.暫儲盒蓋;6.導料管;7.后轉盤;8.外罩;9.圓柱支架;10.前轉盤;11.舵機;12.法蘭連軸器。
轉盤機構還包括外罩和后轉盤,外罩上有吸取孔,后轉盤上有轉運槽;外罩包覆后轉盤,后轉盤與前轉盤相對設置,后轉盤與外罩之間為相對轉動的活動連接。容納腔中的片狀物先進入轉運槽,再通過吸取孔離開轉盤機構,最后通過導料管落入暫儲盒中。
真空泵的吸氣口與吸取孔相通,轉運槽工作面為凹球面結構,開設有吸氣孔;轉運槽中的片狀物在風機的負壓作用下穿過吸氣孔后,再通過吸取孔離開轉盤機構。
外殼與封蓋之間為相對轉動的活動連接結構。暫儲盒與盒蓋之間為相對直線滑動的活動連接結構。此外,第三聯動桿的一端形成導向軸,盒蓋與導向件為固定連接,在導向件上開設條形滑槽,導向軸與條形滑槽之間為滑動配合結構;推拉電磁鐵的推桿與第三聯動桿之間為活動鉸接結構。
在盒蓋底部設計導軌,暫儲盒上設置與導軌形成滑動配合結構的導滑槽。暫儲盒通過第一轉軸與支承座之間形成相對轉動的活動連接結構。輸送機構包括第一底座和滑動座,在第一底座上安裝第一傳動絲桿,第一傳動絲桿與滑動座之間為絲桿傳動機構。
通過轉盤機構上的容納腔,可實現片狀物的收納暫存。當容納腔隨著前轉盤轉動時,處于容納腔中的片狀物將落入暫儲盒中,從暫儲盒中即可方便地取出片狀物。尤其是在需要一次性取用多種片狀物的場合,可先將多種片狀物集中存儲在暫儲盒中,然后一次性從暫儲盒取出,從而提高了片狀物的取用效率,還能避免片狀物取用過程中的污染隱患。
該片狀物存取機構,除用于藥箱外,還可用于食品包裝、制藥包裝、飼料加工等需要對片狀物進行存儲、取用的場合。
2.2 顆粒藥部分
如圖5所示,該功能由五部分組合而成:中心聯動機構、平行四邊形傳藥機構、剪藥袋部分、雙搖桿倒藥機構、曲柄滑塊出杯機構。首先,由槽輪機構驅動傳送機構向剪袋機構輸出袋裝顆粒物,然后,由槽輪機構驅動剪袋機構剪開袋裝顆粒物的包裝袋,最后,通過槽輪機構驅動傾倒機構將開袋后的顆粒物從包裝袋中傾倒出來。
如圖6所示,中心聯動機構為槽輪機構,在槽上有一個中心輪與四個從動輪,機構運轉可分為正行程與逆行程。正行程中心輪順時針轉動360°,四個從動輪依次逆時針轉動90°;逆行程中心輪逆時針轉動360°,四個從動輪依次順時針轉動90°。在一個運轉周期完成后,機構剛好回到初始狀態。
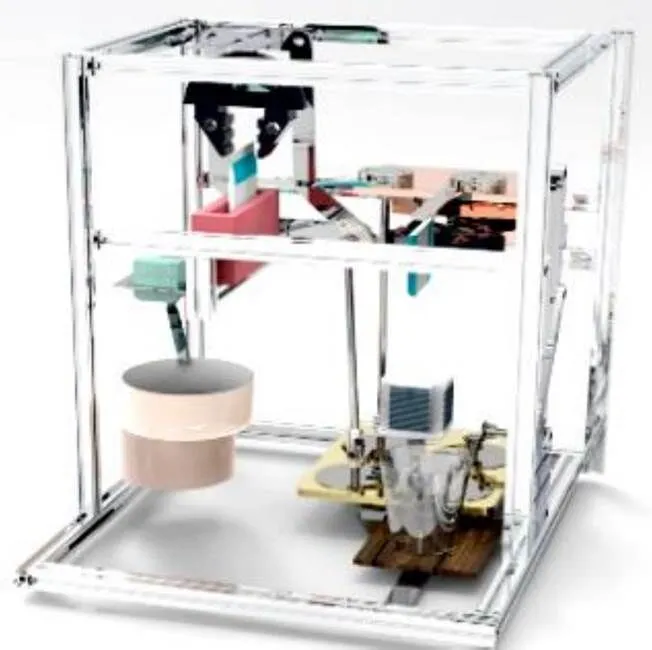
圖5 顆粒藥取藥裝置整體圖
1.平行四邊形機構;2.中心聯動機構3.曲柄滑塊機構;4.剪藥袋機構;5.雙搖桿機構。
傳送機構包括第二聯動桿、從動搖桿以及第三機架和主動搖桿。第二聯動桿與第一機械手連接;第二聯動桿、從動搖桿、第三機架、主動搖桿共同形成平行四邊形結構,且第二聯動桿的相對兩端分別與從動搖桿一端、主動搖桿一端活動鉸接,第三機架的相對兩端分別與從動搖桿另一端、主動搖桿另一端活動鉸接。第二聯動桿通過第一支架與第一機械手連接。
剪袋機構包括刀座、固定刀片和活動刀片。固定刀片與刀座固定連接,活動刀片與刀座之間為相對轉動的活動連接,且活動刀片通過第二傳動軸驅動。
傾倒機構包括第一聯動桿、連架桿、第一主動桿和第一機架。第一聯動桿與第二機械手連接;第一機架的相對兩端分別與連架桿一端、第一主動桿一端活動鉸接,第一聯動桿的相對兩端分別與連架桿另一端、第一主動桿另一端活動鉸接。
這四部分依次固定在中心聯動機構的四個從動輪上,以實現正行程(傳藥袋→剪藥袋→倒藥→送出藥杯)和逆行程(送回藥杯→藥袋回原位→藥袋垃圾處理→松開剪刀→平行四邊形機構回位)的過程。
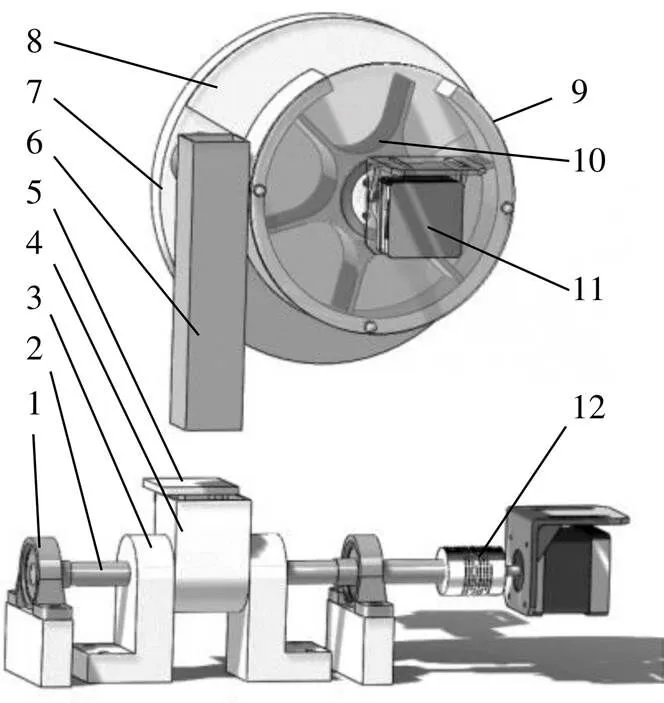
2.3 液體藥部分
這部分裝置主要由中心變胞機構兩個變胞機構組成,整體結構如圖7所示。本設計基于實際使用情況,采用直流電動機與兩個電磁制動器,驅動兩個變胞機構。在芯片的控制下,直流電機正反轉不同角度,通過電磁制動器的開關,兩個變胞機構切換構態,完成任務需求的動作。該過程可逆,將電機轉動過程逆轉,可恢復初始位置。從而完成整套倒藥動作。下面分別分析其機械結構和功能的實現。
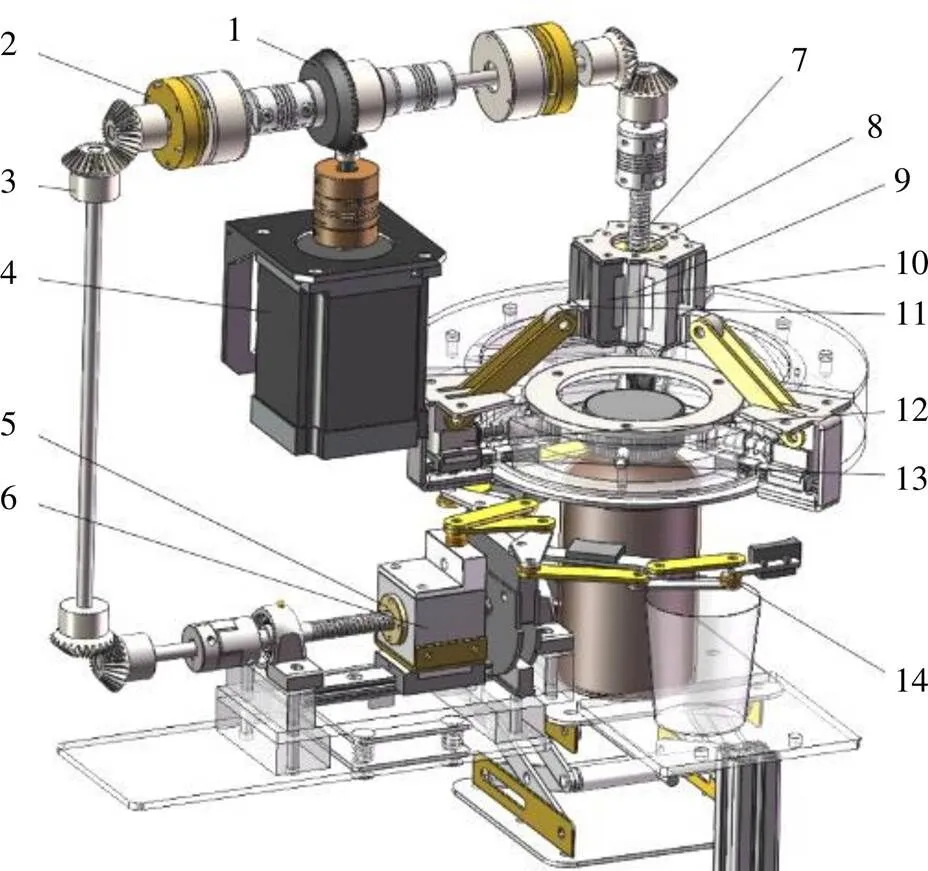
1.轉換座;2.法蘭螺母;3.步進電機;4.錐齒輪;5.差速器;6.絲桿;7.電磁制動器;8.絲桿螺母;9.機體外座;10.滑座;11.滑塊;12.基座;13.二號滑座;14.自適應機械手。
2.3.1 自適應夾持機構
如圖8所示,自適應夾持機構由絲杠、滑塊以及前端機械手構成。
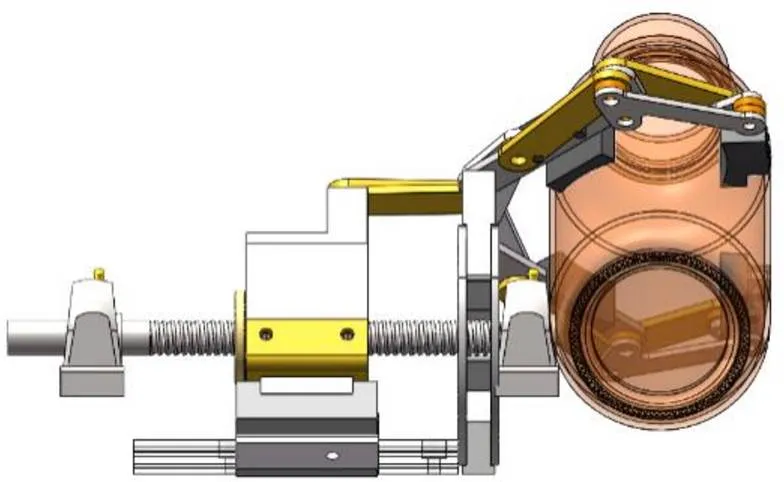
圖8 自適應夾持機構整體三維圖
電機帶動絲杠轉動,滑塊后移,機械手向中間夾持。此時整體機構處于構態一,如圖9(a)。計算自由度可得為2,大于原動件數目,機構無確定運動。但由于機構自身特點,會向阻力最小的方向運動。機械手初步向內收緊。當1處與瓶身接觸,瓶身與1構成機械手的一個約束。機構自由度減為1,與原動件數目相等,機構有確定運動。滑塊繼續后移,機械手完成夾持。由于自適應特點,機械手適應不同瓶身大小,完成夾持動作。
如圖9(b)所示,當機械手2處夾緊瓶身,機械手與瓶身固結,構成一個整體,機構處于構態二,此時,絲杠帶動滑塊轉動。機構整體翻轉,完成傾倒動作。
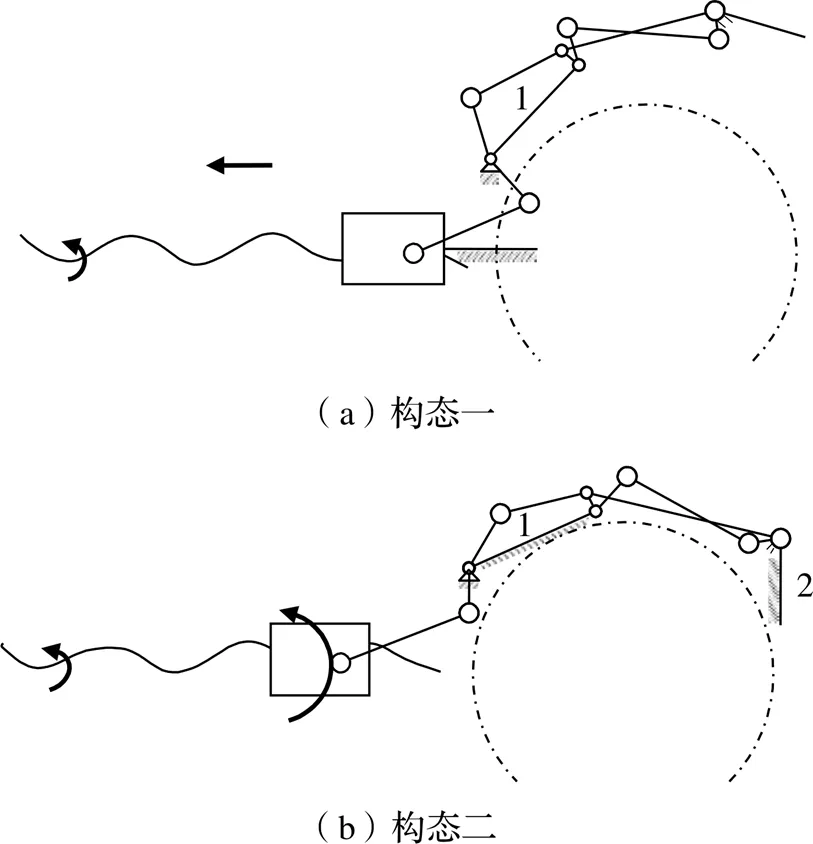
1、2為自適應機械手。
通過電機與電磁制動器,可控制絲杠旋轉時間,從而將夾持機構與傾倒動作分開,實現取藥過程中第一步的夾持動作與最后一步的傾倒動作。
2.3.2 中心變胞機構
中心變胞機構由絲杠、滑塊以及中心軌道構成,其三維圖和構態圖如圖10、圖11所示。

圖10 中心變胞機構整體三維圖
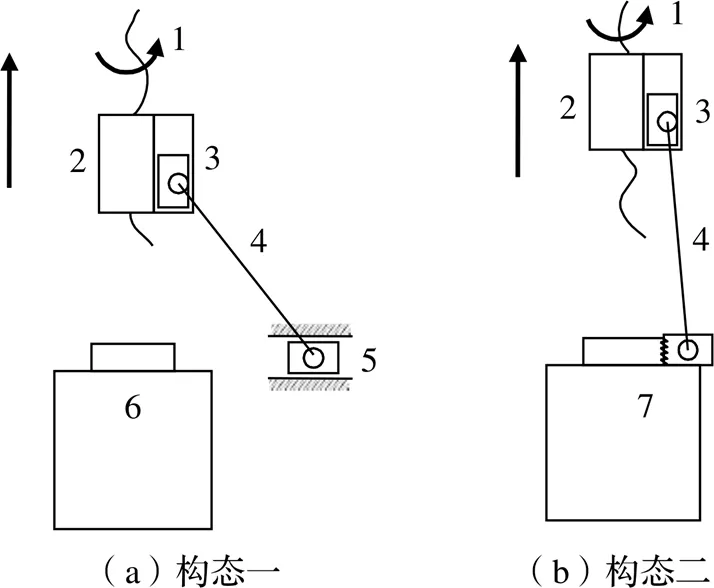
1.絲桿;2.大滑塊;3.小滑塊;4.連桿;5.夾持滑塊;6.藥瓶;7.藥瓶和夾持滑塊構成的機構。
機構初始狀態為構態一,如圖11(a)所示。當絲杠轉動,機體外座上升,機體外殼上的小滑塊被擋板限制,與機體外座固定。通過連桿的驅動,中心軌道上的小滑塊向中間運動,三個滑塊同時向中間運動將瓶蓋夾緊。
將瓶蓋夾緊后,瓶蓋與夾持滑塊構成一個整體。機構處于構態二,如圖11(b)所示。限位裝置限制住大滑塊上升,機體外座隨絲杠旋轉。瓶蓋與夾持滑塊轉動,夾持滑塊后彈簧柱塞進入邊槽。中心變胞機構最外圈是由三個弧形外殼組成的圓,三邊外殼上有按照標準瓶口螺紋放大后設計的邊槽,保證機構后續運動的穩定。擰蓋動作中,瓶蓋與夾持滑塊會進行轉動和上升的復合運動。機體外座轉動,其上小滑塊向上運動,兩者共同完成轉動和上升復合的擰蓋動作。
3 結論
通過市場調查,設計了一款智能藥箱設備。與已有產品相比,該設備具有以下創新點:
(1)提醒并幫助解決老人按時按量吃藥問題,提供突發緊急呼叫、音樂廣播等功能。
(2)對液體藥采用自適應機械手抓和變胞夾緊旋轉機構組合,完成液體藥開瓶、倒藥、封瓶整個流程;對顆粒藥運用平行四邊形機構、雙搖桿機構和曲柄滑塊機構共同完成取藥、裁剪、倒藥和送出;對片狀藥采用雙轉盤形位配合、氣壓吸附。
(3)針對老人閑暇時,提供傻瓜式按鈕和預設戲曲節目等,針對突發情況,提供緊急按鈕一鍵報警和短信息呼救結合,進一步為老人提供生活護理。
[1]葛杰,李澤政,鐘奕琦,等. 基于GSM無線通訊技術的智能藥箱[J]. 電子制作,2020(14):9-10,16.
[2]劉愛斌,李凱丹,汪朋飛. 一種輔助老年人服藥的智能藥箱設計與分析[J]. 機電工程技術,2021,50(12):118-121.
[3]藏家松,馬譽航,王晨哲,等. 家庭智能醫藥箱的設計[J]. 科學技術創新,2021(7):193-194.
[4]李端玲,戴建生,張啟先,等.基于構態變換的變胞機構結構綜合[J].機械工程學報,2002,38(7):12-16.
[5]郭曉寧,張敏.一種變胞式作角機構設計[J].機械設計與研究,2014,30(4):21-23.
[6]吳騰,張武翔,丁希侖.一種新型并聯變胞機構的設計與分析[J].機械工程學報,2015,51(7):30-37.
[7]戴建生,丁希侖,鄒慧君.變胞原理和變胞機構類型[J].機械工程學報,2005,41(6):7-12.
Structural Innovation Design for Smart Medicine Box Based on Metamorphic Mechanism
YANG Xin,SUN Liangbo,XIONG Xinquan
( School of Mechanical Engineering, Wuhan Polytechnic University, Wuhan 430048, China )
The existing smart medicine box has some disadvantages such as low intelligence and single function, which cannot effectively ensure regular and quantitative medication for the elderly living alone. In order to solve the problem, this paper innovatively designs a 'CareKit' medicine box which consists of three parts to contain the commonly used liquid medicine, particle medicine and tablets respectively. The part for liquid medicine adopts the metamorphic mechanism of adaptive clamping seven-bar mechanism and screw nut combination to realize the clamping and tilting of the liquid medicine bottle. The nut rotation drives the 6-bar mechanism to clamp the cap and continues to rotate and change to the 3-component mechanism to realize the cap opening. The part for particle medicine has a groove wheel mechanism to achieve the four actions of taking the bag, clamping and cutting the bag, dumping the bag, and exiting the cup in sequence. The part for tablet combines the fan suction with the double turntable structure and the reserved tablets are taken out according to the quantity. Emergency call button is added to prevent accidents for the elderly. The CareKit medicine box solves the problem of regular and quantitative medication for the elderly living alone and has a good application prospect.
elderly medicine box;metamorphic mechanism;adaptive clamping mechanism;modular design
TH122
A
10.3969/j.issn.1006-0316.2023.01.002
1006-0316 (2023) 01-0009-06
2022-04-29
國家自然科學基金(51875418)
楊鑫(1999-),男,湖北黃岡人,主要研究方向為機械創新設計,E-mail:1986147877@qq.com。*通訊作者:孫亮波(1979-),男,湖北天門人,博士,副教授,主要研究方向為機械設計及理論、機械創新設計、機構學,E-mail:4117449@qq.com。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04