基于優化遺傳算法的焊接機器人路徑規劃研究
2023-03-03 02:18:16范祺蔡玉強賈思楠
機械 2023年1期
關鍵詞:規劃
范祺,蔡玉強*,,賈思楠
基于優化遺傳算法的焊接機器人路徑規劃研究
范祺1,蔡玉強*,1,賈思楠2
(1.華北理工大學 機械工程學院,河北 唐山 063210;2.華北理工大學 礦業工程學院,河北 唐山 063210)
為提高焊接機器人的精度和效率,得到最優的機器人路徑規劃,以現代HA006型機器人為研究對象,在SolidWorks平臺構建其三維模型,依據D-H法獲得其連桿參數數據,進行運動學正逆解理論計算,使用MATLAB robotics工具箱進行運動學正逆解驗證;使用五次多項式曲線方法進行關節空間軌跡規劃,發現加速度在開始結束位置的突變是影響運動過程平穩性的主要原因;基于優化遺傳算法進行路徑規劃,將適應度函數結合路徑長度和平滑度兩項指標,最終仿真得到平滑的優化路徑曲線。
D-H法;運動學正逆解;五次多項式;優化遺傳算法;路徑規劃
隨著金屬加工需求的增加,對焊接工藝的要求變得越來越高,在生產線中引入焊接機器人是大勢所趨。焊接機器人相比于傳統手工焊大幅提高了焊接精度。目前常見的焊接機器人都是在機器人末端執行器處安置焊槍,機器人末端位姿運動能否達到預期運動規律,直接決定了焊接精度與焊接效率[1]。合理的機器人軌跡規劃和路徑規劃是提高作業質量的關鍵[2]。
1 機器人運動學
1.1 機器人連桿參數
選取HA006型機器人為研究對象,在SolidWorks平臺構建其三維模型,如圖1所示。

圖1 HA006機器人三維模型
采用Denvait和Hartenberg提出的在空間中表達機器人各構件相對于坐標系的矩陣表述方法,簡稱D-H法[3]。根據D-H法,HA006型機器人連桿參數坐標系如表1所示。

表1 HA006機器人D-H參數
注:α為連桿扭轉角;α-1為連桿長度;θ為關節轉角;d為連桿偏距。
1.2 MATLAB中建立機器人模型
在MATLAB robotics工具箱中根據D-H參數建立空間連桿模型,調用MATLAB中link類函數建立機器人模型,如圖2所示。
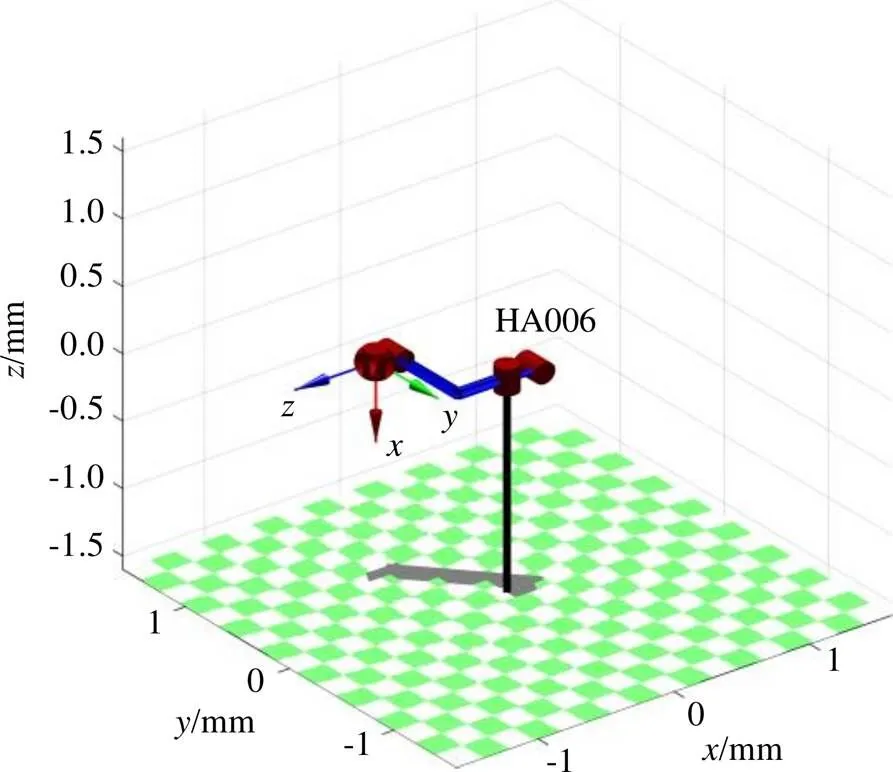
圖2 MATLAB robotics工具箱模型
建立模型的程序為:
L(1)=Link([000pi/20],'modified');
L(2)=Link([-pi/20.200-pi/200],'modified');
L(3)=Link([00.560000],'modified');
L(4)=Link([-pi/20.13000.6200],'modified');
L(5)=Link([pi/20000],'modified');
L(6)=Link([-pi/20000],'modified');
Six_Link=SerialLink([L(1),L(2),L(3),L(4),L(5),L(6)]);
Six_Link.name='HA006';
1.3 正運動學
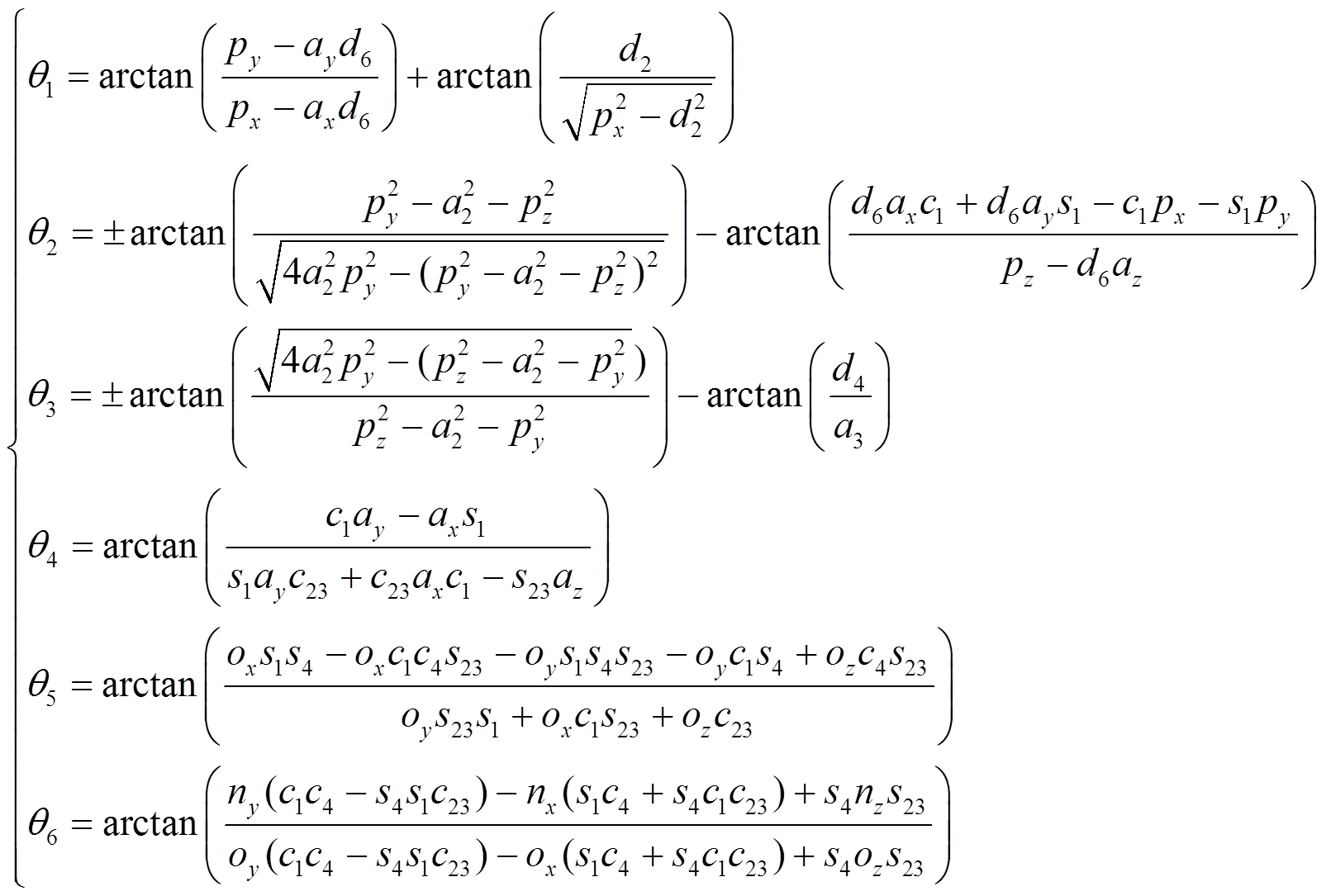
機器人運動學正解就是將各連桿相對于基坐標系變換矩陣做相乘變換,在已知各關節運動角度的基礎上,得到末端執行器的位姿矩陣為[4]:

式中:
在MATLAB中調用fkine函數進行運動學正解驗證,選取關節角度值依次為pi/2、pi/3、pi/4、pi/2、pi/6、pi/2,按照理論推導出的末端執行器的位姿矩陣為:

調用的fkine函數為:
Six_Link.fkine([pi/2pi/3pi/4pi/2pi/6pi/2])
最終驗證仿真結果與計算理論值一致。
1.4 逆運動學
運動學逆解是在已知機器人末端姿態矩陣的情況下反求出各關節角的大小,用代數方法反求出各關節角的角度大小為:
將式(2)代入調用的ikine[5]中進行運動學逆解驗證,調用的ikine函數為:
Six_Link.ikine6s(T1)
計算結果顯示運動學逆解與理論值一致,說明機器人連桿參數模型的正確性,機器人模型建立無誤,可以進行軌跡規劃等后續操作。
2 機器人關節空間軌跡規劃
關節空間軌跡規劃中常用的方法是三次、五次以及高次插值多項式的方法,為了提高軌跡的平滑性能,未來主流的方法是B樣條曲線、NURBS曲線方法。五次插值多項式方法通常是已知初始位置與結束位置的角度和角速度,增加了加速度的約束條件,適用于點到點之間的運動,利用MATLAB軟件調用jtraj函數進行仿真[6-8],可以得到各關節運動參數隨時間變化的關系,其中關節6的角度、角速度、角加速隨時間的變化情況如圖3所示。

圖3 關節參數運動曲線
在圖3運動軌跡中,關節6的角度、角速度、角加速隨時間變化的曲線是連續但不夠平滑,特別是在開始、結束和曲線拐點時刻,加速度的突變是機器人運動過程中產生沖擊的主要原因。
3 基于優化遺傳算法的機器人路徑規劃
在當前的機器人路徑規劃領域中,包含Dijkstra、A*、RRT(Rapidly-exploring Random Tree,快速隨機探索樹)、RRT*和InformdRRT*算法,以及遺傳算法和蟻群算法。其中基于智能算法的遺傳算法和蟻群算法具有完備性,只要在起始點與目標點有解,那么就一定能夠得到解,如果無解說明路徑不存在[9]。各類算法中,優化遺傳算法的計算時間最長、效率最低,但規劃的路徑更為平順,路徑長度更為合理。各類算法的計算原則如圖4所示。
遺傳算法在串聯機器人路徑規劃中應用較為廣泛,算法的規劃流程如圖5所示。

圖4 路徑規劃算法

圖5 遺傳算法流程圖
3.1 建立柵格地圖
通過柵格法建立機器人工作的靜態環境模型,空間環境精度與柵格面積成反比,柵格面積越小,存儲的信息量就越大,這樣路徑規劃所需的時間就越長;柵格面積如果過大,工作空間環境信息[9]又不能準確地表達出來,因此選擇了20×20的柵格地圖,并做出以下規定;
(1)路徑規劃中把機器人當做質點處理;
(2)機器人運動空間為二維平面,忽略掉障礙物高度;
(3)在機器人開始運動后,確定障礙物大小,且不存在動態障礙物。
為方便仿真,機器人整體運動空間用正方形柵格地圖表示,如圖6所示,柵格黑色表示柵格內存在障礙物,白色表示柵格內無障礙物。

圖6 柵格地圖
在構建運動柵格地圖時,建立直角坐標系,原點為左下角第一個柵格,在坐標系內用(,)的形式表示每一個柵格,從原點開始對柵格進行編號,編號和坐標間的關系為:

式中:為柵格號;為柵格數量;mod為取余;int為取整操作,表示取整格尺為每一行柵格數。
3.2 種群初始化
機器人的起始位置為柵格0,目標位置為柵格399。種群初始化要求隨機產生多條不與障礙物相撞的可行路徑,機器人每次行走一個柵格,因此每行每列至少有一個柵格在可行路徑中。所以初始化時先按順序在每一行隨機取出一個無障礙柵格,形成一條間斷的路徑,再從第一個柵格開始判斷相鄰的兩個柵格是否為連續柵格,柵格是否連續的判斷方法為:

若=1,則說明兩個相鄰柵格連續,可在避免死循環的情況下繼續規劃路徑。
對于≠1的不連續柵格,需取中點柵格,其坐標為:

若新柵格為無障礙物柵格,則插入兩個不連續柵格中間。繼續判斷新插入是否連續,若不連續則循環以上步驟,直到兩個柵格連續。當兩個柵格連續后取下一個柵格,循環以上步驟,直到整條路徑連續。
3.3 適應度函數計算
傳統遺傳算法中,遺傳因素中主要是路徑因素,要保持路徑最短。改進遺傳算法中,適應度函數包括最優路徑和平滑度兩部分,路徑長度為:

路徑長度的適應度為:
路徑規劃中需盡可能避免過多次的大幅度轉彎,因此需要控制路徑軌跡的平滑度,定義平滑度為路徑中所有相鄰三點的距離,平滑度適應度為2。
適應度函數的兩部分需要取一個權重,為:
=1+2(9)
式中:和為適應度函數的權重參數,決定了路徑的最終走向。
3.4 遺傳算子
選擇輪盤賭方法,先獲得適應度函數各部分之和,根據權重占比情況,選擇出下一代個體。這種方法在保證了部分非最優的個體的同時,又防止陷入局部最優解的問題。
交叉前先確定交叉概率p,之后產生隨機數與p比較,進行交叉操作的條件是隨機數小于p。交叉操作是在已獲得的兩條路徑中找出兩個相同柵格,選取其中一個柵格交換它們之后的路徑。
變異前先確定變異概率p,之后產生隨機數與p比較,進行變異操作的條件是隨機數小于p。在隨機路徑中找到除起點終點外的兩個柵格,去除它們之間的路徑,然后以這兩個柵格為相鄰點,按照初始化操作將這兩個柵格連續化。這樣的變異操作增加了個體的多樣性[10]。
3.5 仿真結果
使用MATLAB遺傳算法工具箱進行仿真,設定種群數量為150,p=0.8,p=0.2,=8,=2,限制迭代次數不超過100次,仿真后得到圖7。

圖7 路徑仿真結果
由仿真結果可看出,結合考慮了路徑長度和平滑度的路徑規劃,在經過多次迭代后達到收斂,最終規劃的路徑在長度上雖然不是最短的,但曲線的平滑性得到較大改善,避免了銳角的出現。
4 結論
(1)以HA006型機器人為研究對象,得到其連桿參數數據,通過理論計算得到其運動學正逆解,在MATLAB的robotics工具箱中進行正逆解驗證,最終證明HA006機器人模型建立的正確性。
(2)機器人關節空間軌跡規劃利用五次插值多項式方法,得到其關鍵運動參數隨時間變化的曲線,發現加速度突變問題是影響運動過程平穩性的關鍵,為后續提高機器人平穩性、減少振動等技術要求做了準備。
(3)為實現基于優化遺傳算法的路徑規劃,介紹了種群初始化、適應度函數、選擇方法、變異方法和交叉方法,針對適應度函數進行優化,解決傳統遺傳算法路徑不夠平滑的問題,設計更加合理的平滑函數,得到合理的路徑規劃。
[1]孫英飛. 我國工業機器人發展研究[J]. 科學技術與工程,2012,12(12):2912-2920.
[2]戴為志,俞海濤,王繼文. 鋼結構焊接機器人的現狀及發展方向[J]. 金屬加工(熱加工),2021(12):7-12.
[3]任軍輝,喬琳. 基于UG機器人末端執行器的設計與運動仿真[J]. 南方農機,2022,53(5):22-24.
[4]楊曉玉,富榮昌,王文遠. 基于ADAMS和MATLAB的雙足機器人運動軌跡規劃和控制的聯合仿真[J]. 煤礦機械,2022,43(1):6-9.
[5]莊衡衡,丁飛,章華濤,等. 五自由度機器人運動控制與空間位姿仿真系統[J]. 中國測試,2021,47(11):14-20.
[6]李雙雙. 工業機器人建模、運動仿真與軌跡優化[D]. 呼和浩特:內蒙古大學,2012:30-34.
[7]于佳喬,李巖. 基于改進遺傳算法的自動導航小車路徑規劃調度[J]. 機床與液壓,2022,50(5):16-20.
[8]樂英,庫巍,盧藝,等. 基于優化的六自由度工業機器人NURBS軌跡規劃[J]. 組合機床與自動化加工技術,2017(11):41-43.
[9]曾關平,王直杰. 基于改進遺傳算法的機械臂時間最優軌跡規劃[J]. 科技創新與應用,2020(22):6-9.
[10]胡錦楠,楊澤. 基于遺傳算法的噴涂軌跡規劃方案研究[J]. 科技創新導報,2019,16(25):68-69.
Path Planning of Welding Robot Based on Optimized Genetic Algorithm
FAN Qi1,CAI Yuqiang1,JIA Sinan2
( 1.School of Mechanical Engineering, North China University of Science and Technology, Tangshan 063210, China; 2.School of Mining Engineering, North China University of Science and Technology, Tangshan 063210, China)
In order to improve the welding accuracy and efficiency of the welding robot and obtain the optimal path planning, a three-dimensional model of Hyundai Robot HA006 is constructed on the SolidWorks platform. The connecting rod parameter data is obtained based on the D-H method, and the theoretical calculation of kinematic forward and inverse solution is carried out. The kinematic forward and inverse solution is verified by using the MATLAB robotics toolbox, and the joint space trajectory planning is carried out by using the combination of quintic polynomials andspline curves. It is found that the sudden change of acceleration at the beginning and end position is the main reason that affects the stability of the motion process. Based on the optimized genetic algorithm and combined the adaptability function with the two indicators of path length and smoothness, the smooth optimized path curve is finally obtained by simulation.
D-H method;kinematic forward and inverse solution;quintic polynomial;optimized genetic algorithm;path planning
TP242.3
A
10.3969/j.issn.1006-0316.2023.01.011
1006-0316 (2023) 01-0068-06
2022-03-03
河北省教育廳項目(2019GJJG216);華北理工大學博士啟動基金項目(BS2017094)
范祺(1998-),男,河北唐山人,碩士研究生,主要研究方向為機械機構學與機械動力學,E-mail:tangshanfankuli@163.com。*通訊作者:蔡玉強(1967-),男,河北唐山人,博士,教授,主要研究方向機械動力學,E-mail:1824880027@qq.com。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41