一種改進(jìn)單脈沖技術(shù)的低角跟蹤性能分析
2023-03-04 13:34:04王安飛郭肅麗
計算機(jī)測量與控制 2023年2期
王安飛, 郭肅麗
(中國電子科技集團(tuán) 第54研究所,石家莊 050081)
0 引言
當(dāng)相控陣天線對低仰角目標(biāo)進(jìn)行跟蹤時,目標(biāo)發(fā)射的經(jīng)海面或地面反射的信號與直射信號近乎同時被接收。此時的多徑反射信號與直射信號是高度相關(guān)的,因而從時域、頻域上都很難對兩者進(jìn)行分辨[1-3]。
在低仰角環(huán)境下,多徑效應(yīng)為影響系統(tǒng)跟蹤精度的主要因素。在相控陣系統(tǒng)中,一種同時多波束體制角跟蹤方法被廣泛應(yīng)用,即單脈沖技術(shù)。在單脈沖體制下,一般通過接收天線的和差波束方向圖函數(shù)來實現(xiàn)對目標(biāo)的跟蹤測量[4-5]。相控陣系統(tǒng)進(jìn)行精密角跟蹤時通常采用相位和差單脈沖測角技術(shù)[6-7]。該方法在多徑效應(yīng)的影響下,測角精度大幅下降,嚴(yán)重時甚至?xí)斐赡繕?biāo)丟失。
為了消除多徑效應(yīng)的影響,文獻(xiàn)中提出了不同的方法。復(fù)角法(CA,complex indicated angles)是最早的有效方法之一;該方法通過單脈沖比的實部和虛部來跟蹤低角度目標(biāo)[8];文獻(xiàn)[9]中提出了一種改進(jìn)頻率分集方法,該方法引用了幾個不同的頻率和最小平方(LS,least square)算法;文獻(xiàn)[10]提出了一種基于頻率敏捷的最大似然算法,該方法通過在跟蹤過程中調(diào)整工作頻率,使角度估計的誤差最小。在文獻(xiàn)[11]中,筆者提出了一種基于CA的自適應(yīng)混合方法:該方法通過利用改進(jìn)的CA方法和自適應(yīng)波束成形算法來抑制多徑效應(yīng)。文獻(xiàn)[12]提出了一種基于兩種頻率的高程幾何平均算法:該方法通過利用目標(biāo)仰角和鏡像目標(biāo)仰角的乘法運算來進(jìn)行目標(biāo)跟蹤定位。文獻(xiàn)[13]介紹了一種雙零點(DN, double null)差分模式和固定波束(FB, fixed beam)模式。DN系統(tǒng)能夠?qū)⒛繕?biāo)與鏡像目標(biāo)分離開來,它的差通道有兩個指向,其中第二指向在鏡像目標(biāo)方向。幾年后,文獻(xiàn)[14]通過對DN和FB系統(tǒng)中的和差波束通道進(jìn)行陣列加權(quán)實現(xiàn)了對這兩種模式的優(yōu)化,提出了一種新的具有對稱差分模式的單脈沖系統(tǒng)。文獻(xiàn)[15]通過數(shù)字波束形成技術(shù)設(shè)計了一種新的對稱差波束單脈沖系統(tǒng),但該系統(tǒng)存在一定的局限性:在理想鏡面反射條件下該方法失效。最近。另一種基于FB方法的波束成形技術(shù)被提出[16],該方法能夠有效保證波束的均勻?qū)ΨQ性。文獻(xiàn)[17]提出了一種迭代干擾消除算法來抑制多徑效應(yīng):基于子空間分解的多信號分類(MUSIC,multiple signal classification)算法[18],并利用迭代投影理論,通過對每個低仰角目標(biāo)測量信號的設(shè)計,實現(xiàn)了對該方法的性能優(yōu)化。
相控陣系統(tǒng)中常采用的多徑消除技術(shù)技術(shù)有偏軸單脈沖法、對稱波束法。偏軸單脈沖法的指導(dǎo)思想是當(dāng)目標(biāo)仰角小于某臨界角(一般為0.7倍波束寬度)時,相控陣天線的波束指向不再降低,固定在該方向上[19-20]。由于偏軸跟蹤能夠抑制出現(xiàn)極端嚴(yán)重多徑誤差的情況,且實現(xiàn)簡單,是一種較常使用的低仰角目標(biāo)跟蹤技術(shù),但該方法的跟蹤精度較低。對稱波束法通過重新設(shè)計接收天線的和、差波束方向圖使得單脈沖鑒角曲線關(guān)于波束指向偶對稱,需要注意的是,該方法要求波束指向目標(biāo)與鏡像目標(biāo)夾角的角平分線方向。當(dāng)波束指向與目標(biāo)-鏡像的角平分線重合時,和、差波束單脈沖比僅與直射信號的單脈沖比有關(guān)。這時只要我們根據(jù)系統(tǒng)的差斜率測出單脈沖比,即可確定目標(biāo)仰角。但是,由于對稱波束法要求目標(biāo)與其鏡像同處于天線波束照射范圍內(nèi),局限性較大[21-23]。
需要注意的是:多徑消除技術(shù)的應(yīng)用有效地提升了單脈沖系統(tǒng)的跟蹤精度,但對噪聲敏感,且不能夠解決信號衰減的問題。空間分集技術(shù)的應(yīng)用能夠有效解決這一問題。相控陣系統(tǒng)由于不同陣元放置在不同位置或高度上,空間分集技術(shù)的應(yīng)用可以使得到達(dá)這些陣元的反射信號路徑不同,從而減少多徑效應(yīng)的影響[24]。常用的空間分集技術(shù)有:選擇合并分集、等增益合并分集、最大比合并分集。經(jīng)過理論與實踐證明,最大比合并分集(MRC,maximal ratio combining)是一種最佳的空間分集方案[25]。它能夠在提高相控陣系統(tǒng)信噪比的同時完成通信系統(tǒng)中斷概率的優(yōu)化,補(bǔ)償因多徑造成的信號衰落,使接收信號功率能夠滿足跟蹤和數(shù)據(jù)解調(diào)要求。
本文提出了一種改進(jìn)單脈沖測角技術(shù)。改進(jìn)單脈沖技術(shù)的處理思想是通過修正天線的方向圖消除多徑信號的影響。該方法利用相鄰脈沖差波束相位跳變構(gòu)造對稱波束,并采用頻率分集技術(shù),通過對不同工作頻率下得到的和差波束進(jìn)行一系列運算,能夠準(zhǔn)確得出目標(biāo)與鏡像目標(biāo)的角度信息,將特定環(huán)境下單脈沖系統(tǒng)的測角誤差由之前的1°左右降低到0.1°以下。
1 多徑反射模型與機(jī)理
1.1 多徑反射模型
如圖1為相控陣天線與飛行目標(biāo)所建通信鏈路的幾何模型示意圖。設(shè)相控陣天線高度為hR,飛行目標(biāo)高度為hT,反射信號與水平面夾角(λ射余角)為Ψ,等效地球半徑為RE,相控陣天線與飛行目標(biāo)的視線距離為Rd。
根據(jù)圖1所示的幾何關(guān)系,可得直射路徑與反射路徑的路程差△R為:
△R=R1+R2-Rd
(1)
(2)
(3)
圖1 球面反射模型
在該模型下需要計算目標(biāo)的最大可視距離Llimit。如圖2所示,當(dāng)飛行目標(biāo)與測控站的距離大于Llimit時,受地球曲面的影響,二者無法建立視距通信鏈路。
圖2 曲面地球模型
由圖2中幾何關(guān)系得:
(4)
假設(shè)hR處為一個垂直放置的均勻線陣,陣元數(shù)為N,陣元間距為d,工作頻率為f,可得波束寬度:
(5)
其中:θe為波束寬度(rad);k為波束寬度因子,均勻口徑照射情況下k通常取值0.886;C為真空中電磁波傳播速率,c=3×108m/s;N為陣元個數(shù);d為陣元間距(m);f為工作頻率(Hz);θ0為波束指向角(rad)。
當(dāng)反射信號進(jìn)入相控陣天線波束主瓣反射區(qū)時,跟蹤精度下降嚴(yán)重,此時直射信號、多徑反射信號與波束主瓣寬度的幾何關(guān)系滿足:
θt≤1.5θe
(6)
根據(jù)式(5)和圖1中幾何關(guān)系得:
(7)
1.2 多徑反射機(jī)理
在多徑反射中,最主要的一個參數(shù)就是反射系數(shù),它決定了多徑反射信號相位和幅度上的變化。該系數(shù)由菲涅爾反射系數(shù)ρ0、擴(kuò)散因子D、鏡面散射因子ρs的乘積組成[26-28]。
ρ=ρ0Dρs
(8)
1.2.1 菲涅爾反射系數(shù)
光滑表面的菲涅爾反射系數(shù)由反射表面的電磁特性決定,不同極化形式的菲涅爾反射系數(shù)表達(dá)式如下:
對于垂直極化有:
(9)
對于水平極化有:
(10)
其中:εc是復(fù)介電常數(shù):εc=εr-j60λσ,εr為相對介電常數(shù),λ為電磁波的波長,σ為電導(dǎo)率。
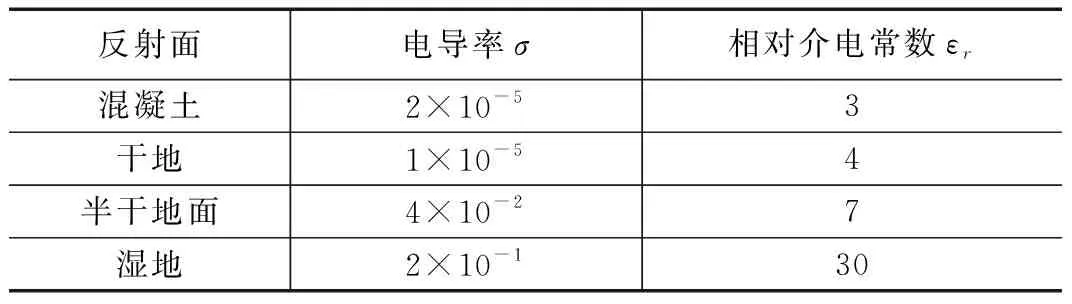
表1 不同反射面的電導(dǎo)率和相對介電常數(shù)
1.2.2 擴(kuò)散因子
擴(kuò)散因子D是考慮地球曲率影響的結(jié)果。當(dāng)反射信號照射到凸起的地球表面時會引起擴(kuò)散,使得電磁波能量密度衰減。擴(kuò)散因子的值由下式給出:

(11)
1.2.3 鏡面散射因子
反射面的粗糙使得鏡面反射的幅度有所衰減,用鏡面散射因子ρs表征。它與反射面粗糙度因子Г的關(guān)系為:
(12)
ρs隨Г的變化曲線如圖3所示。
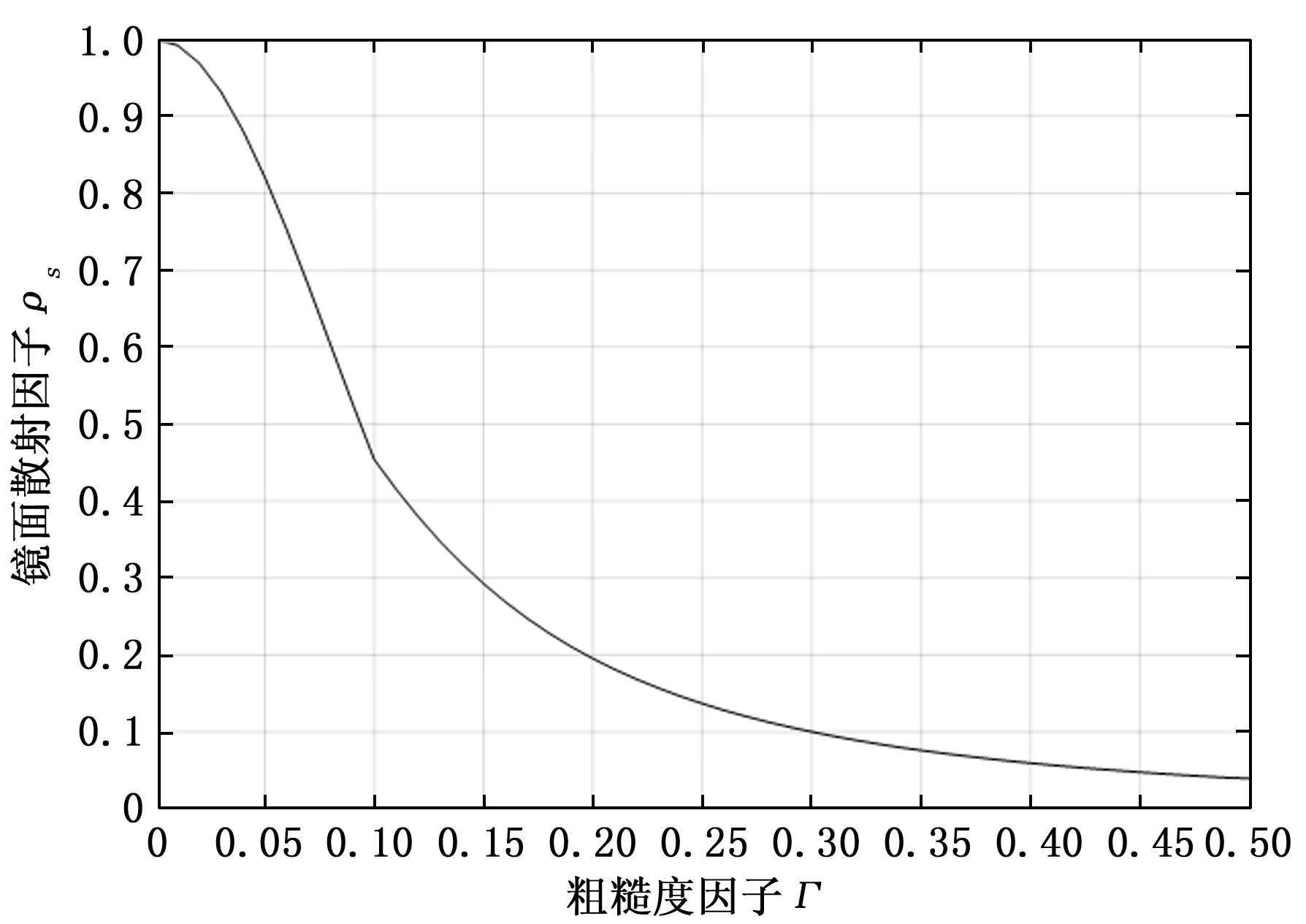
圖3 鏡面散射因子ρs與粗糙度因子Г的關(guān)系曲線
1.3 多徑效應(yīng)下的接收信號模型
在考慮多徑效應(yīng)的情況下,假設(shè)反射面為平靜海面,則相控陣天線接收信號電平F表示為:
F=|g(θ1)+ρg(θ2)e-jφ|
(13)
這里θ1、θ2分別為波束指向與目標(biāo)、目標(biāo)鏡像的夾角,φ是由目標(biāo)上電磁波傳播的直射與反射路徑之間的路程差△R引起的相對相位差:
(14)
其中:λ為信號波長,△R隨目標(biāo)距離的變化而相應(yīng)地發(fā)生變化。圖4給出了多徑效應(yīng)下相控陣天線接收信號電平F(對數(shù)表示)隨視線距離Rd的變化情況,可以看出多徑效應(yīng)的影響相當(dāng)越嚴(yán)重。
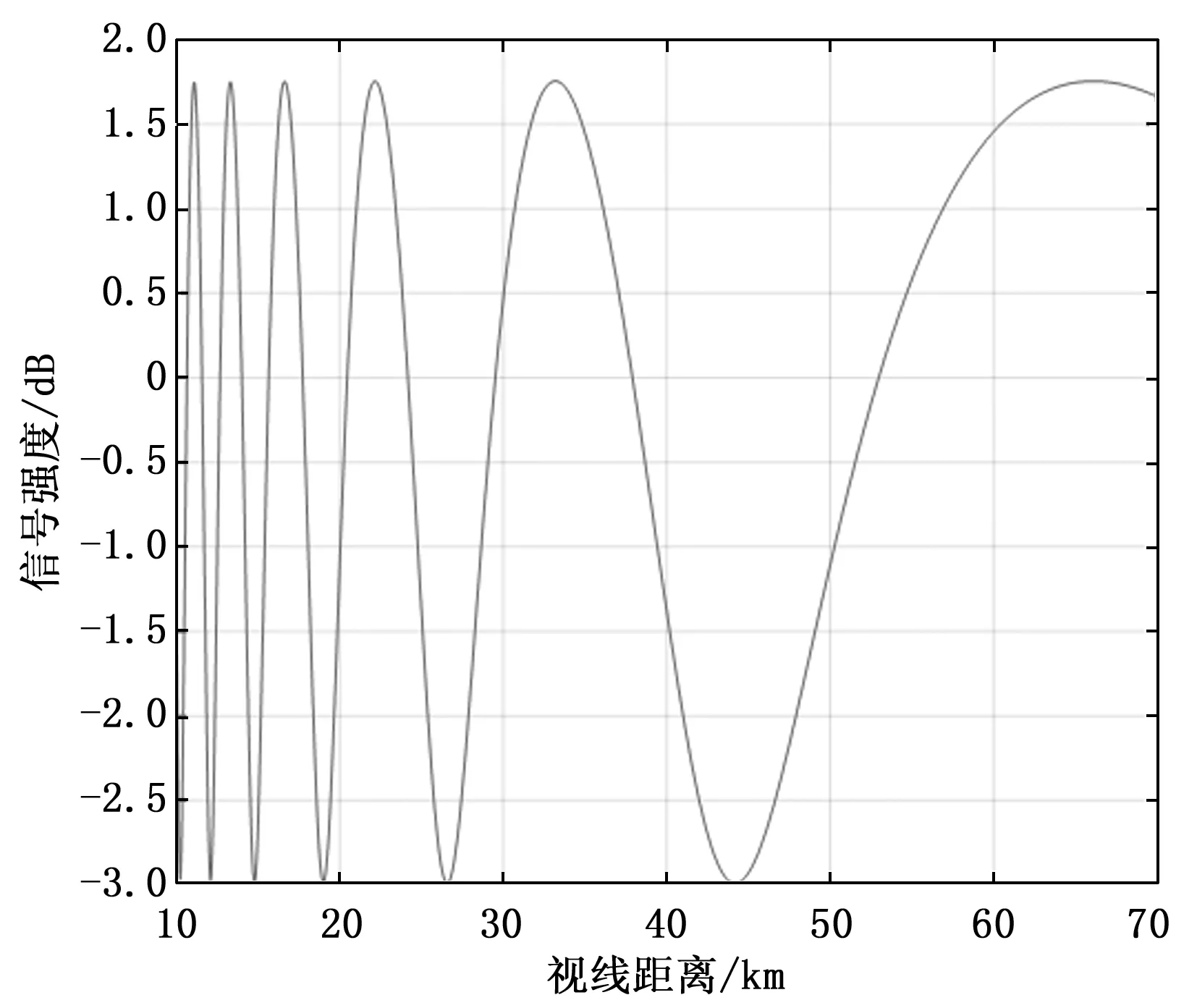
圖4 多徑效應(yīng)影響下的方向圖傳播因子ht=2 km, hr=5 m,載波頻率fc=6 GHz
2 多徑對低角跟蹤的影響
在單脈沖體制下,相控陣系統(tǒng)一般通過接收天線的和、差波束方向圖函數(shù)實現(xiàn)對目標(biāo)的跟蹤測量。當(dāng)相控陣天線高度為米級,目標(biāo)飛行高度為公里級,距離相控陣天線的視線距離公里級時,球面反射模型可簡化為如圖5所示的理想平面反射模型。假設(shè)θ0表示波束指向,△θ表示波束指向偏差,和波束方向圖函數(shù)為F∑(θ+△θ),差波束方向圖函數(shù)為FΔ(θ+Δθ),經(jīng)過跟蹤接收機(jī)的信號接收后產(chǎn)生角誤差電壓驅(qū)動,和波束不斷向最大值方向移動,差波束不斷向方向圖為零的方向移動,進(jìn)而實現(xiàn)對目標(biāo)的實時跟蹤。
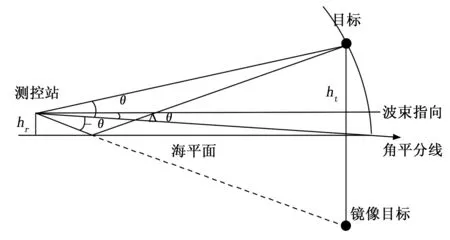
圖5 理想平面反射模型示意圖
假設(shè)只考慮鏡面反射的影響,當(dāng)陣列天線的波束中心指向水平方向時,系統(tǒng)的和信號和差信號分別為:
V∑=F∑(θt)+ρF∑(θi)
(15)
VΔ=FΔ(θt)+ρFΔ(θi)
(16)
式中,θt為目標(biāo)仰角;θi為鏡像目標(biāo)仰角;ρ為反射系數(shù)。根據(jù)圖4,在低仰角環(huán)境下,可近似認(rèn)為,Δθ≈0,θt=-θi=θ。由此得到和差波束單脈沖比為:
(17)
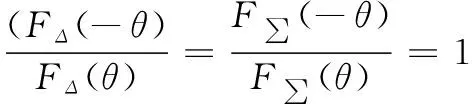
由于和波束方向圖函數(shù)為偶函數(shù),差波束方向圖函數(shù)為奇函數(shù),即:
(18)
因此:
(19)
式(19)表明,多徑條件下經(jīng)典單脈沖系統(tǒng)的單脈沖比與目標(biāo)仰角、反射系數(shù)有關(guān)。當(dāng)反射系數(shù)未知時,無法根據(jù)單脈沖比準(zhǔn)確求出目標(biāo)仰角。
如圖6為理想條件與多徑效應(yīng)影響下的和差波束方向圖。在該實驗中,設(shè)定垂直地面放置的均勻線陣陣元數(shù)為16,測控站高度為5 m,目標(biāo)飛行高度為200 m,視線距離為10 km。從圖中我們可以得出,受多徑效應(yīng)的影響,和波束對稱軸、差波束對稱中心發(fā)生偏移,差零深降低。這時即使波束指向偏差為零,角誤差信號也不為零,若要使角誤差信號為0,則必須將波束指向另外偏轉(zhuǎn)一個角度使其與多徑反射信號相抵消。這個另外偏轉(zhuǎn)的角,就是多徑效應(yīng)形成的測角誤差。
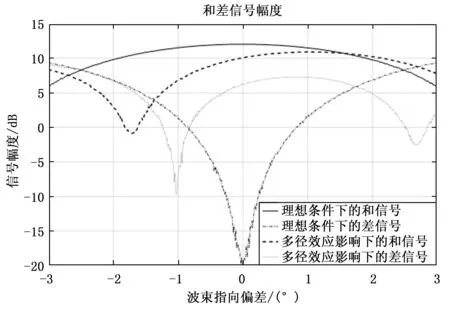
圖6 理想條件與多徑效應(yīng)影響下和差波束方向圖
如果對該單脈沖算法進(jìn)行改進(jìn),使得和差波束單脈沖鑒角曲線關(guān)于波束指向偶對稱,即:
(20)
代入式(17)可得:

(21)
此時,和、差波束單脈沖比僅與直射信號的單脈沖比有關(guān),而與多徑反射信號無關(guān),多徑反射信號分量在測角過程中被完全抵消了。因此,改進(jìn)單脈沖測角法能夠有效克服多徑對于單脈沖比的影響。
3 改進(jìn)單脈沖測角技術(shù)原理與功能實現(xiàn)
在該單脈沖體制下,相控陣系統(tǒng)假設(shè)目標(biāo)的運動狀態(tài)在相鄰脈沖周期內(nèi)基本保持不變,測控站選用垂直均勻線陣,陣元數(shù)為2N,如果在第k個脈沖時刻相控陣天線發(fā)射波束指向目標(biāo),則在第k+1個脈沖時刻相控陣系統(tǒng)切換工作模式,通過控制數(shù)字移相器使發(fā)射波束指向鏡像目標(biāo)。然后在第k+2個脈沖時刻波束指向目標(biāo),第k+3個脈沖時刻指向鏡像目標(biāo),依此不斷循環(huán)往復(fù)。則在第k個脈沖時刻內(nèi)波束掃描到的來自目標(biāo)的直射信號和來自鏡像目標(biāo)的反射信號可表示為:

(22)
第k+1個脈沖時刻內(nèi)波束掃描到的來自目標(biāo)的直射信號和來自鏡像目標(biāo)的反射信號可表示為:

(23)

(24)
在單脈沖系統(tǒng)中,由第k個和第k+1個相鄰脈沖時刻波束掃描信號組成的和信號可表示為:

(25)
由上、下子陣波束掃描信號組成的差信號可表示為:
(26)
改進(jìn)單脈沖系統(tǒng)的和差波束形成網(wǎng)絡(luò)如圖7所示。
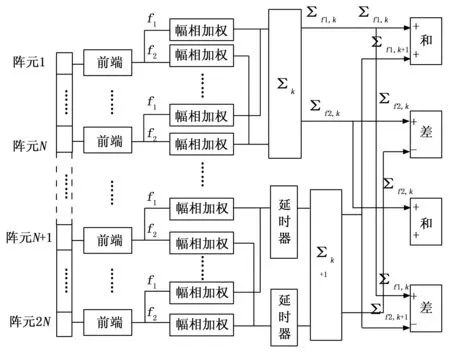
圖7 改進(jìn)單脈沖測角法和差波束形成網(wǎng)絡(luò)
根據(jù)相控陣系統(tǒng)的單脈沖測角原理可知,該情況下得到的和差波束單脈沖比與反射系數(shù)ρ有關(guān),無法準(zhǔn)確得出目標(biāo)仰角。為了消除反射系數(shù)ρ,這里擬采用頻率分集的方式:假設(shè)目標(biāo)發(fā)射f1、f2兩種不同工作頻率的信號,在相控陣系統(tǒng)接收端同時接收這兩個信號后合成。當(dāng)相控陣天線采用不同的工作頻率f1、f2時,根據(jù)圖8我們可以到不同頻率下的和、差信號功率為:
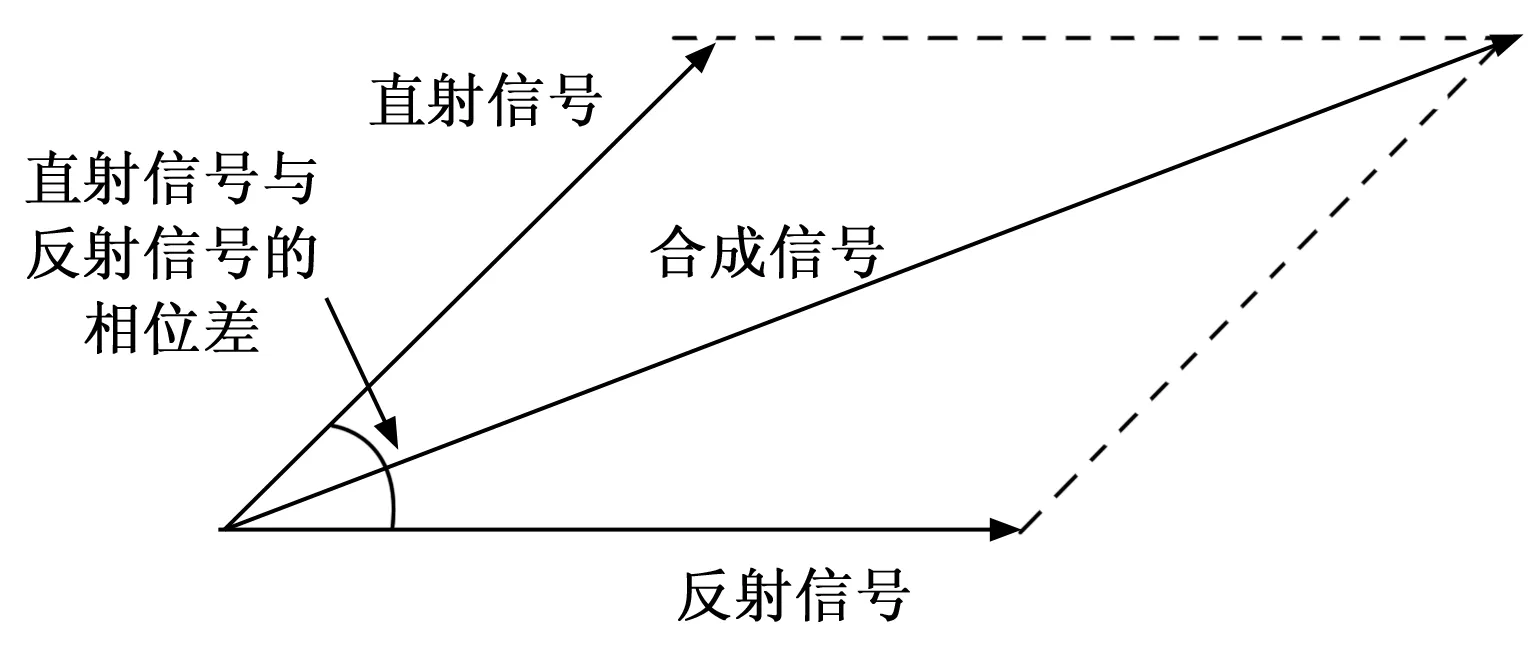
圖8 直射信號與反射信號的合成

(27)
(28)
(29)
(30)
當(dāng)頻率變化較小時,可近似認(rèn)為|ρf1|=|ρf2|。通過運用幾何平均算法,將不同工作頻率下和差信號進(jìn)行如下運算得到的和差波束單脈沖比T1與反射系數(shù)ρ無關(guān),計算結(jié)果如下:
(31)
由單脈沖測角原理可知:
(32)
(33)
其中:k為差斜率。將式(32)~(33)聯(lián)立可得:
T1=k2θtθi
(34)
在鏡像多徑對稱條件下可近似認(rèn)為θt=-θi,則式(34)可表示為:
T1=-k2θt
(35)
因此,根據(jù)T1查表即可近似得到目標(biāo)仰角θt。(相控陣系統(tǒng)的差斜率已知)根據(jù)式(34)、(35)可知,該計算存在一個近似,而實際上有幾何關(guān)系可知,目標(biāo)仰角θt是略小于鏡像目標(biāo)仰角θi的。因此,僅由T1不能夠準(zhǔn)確計算出θt和θi。
根據(jù)式(34)可知,由T1得出了θt和θi的積,若要進(jìn)一步提升單脈沖系統(tǒng)的跟蹤精度,實現(xiàn)目標(biāo)與鏡像的分離,可將不同頻率的和、差信號進(jìn)行如下運算得到T2:
(36)
將式(32)、(33)代入式(36)可得:
(37)
根據(jù)式(37)可知,由T2得出了θt和θi的和,利用平方和差公式與式(35)聯(lián)立,θt可以準(zhǔn)確計算出目標(biāo)仰角θt與鏡像目標(biāo)仰角θt的值,有效克服了系統(tǒng)誤差對系統(tǒng)跟蹤性能的影響:

(38)

(39)
在某些頻段內(nèi),受附加噪聲的影響和信號輸出功率|∑f1|2、|∑f2|2的差值很小,導(dǎo)致改進(jìn)單脈沖法的性能惡化。因此,需要對頻率f1、f2,使得和信號輸出功率的差值最大。由式(27)、(28)可得:
|∑f1|2-|∑f2|2=2∑d∑inρ(cos(φf1)-cos(φf2))
(40)
經(jīng)化簡可得:
(41)
4 空間分集——最大比合并分集在相控陣系統(tǒng)中的應(yīng)用
在低仰角情況下,由于直射信號與反射信號的干涉,多徑效應(yīng)不僅會造成相控陣天線俯仰方向差方向圖零點偏移,跟蹤精度降低,還會造成信號衰落,影響數(shù)據(jù)的接收和解調(diào)。改進(jìn)單脈沖測角技術(shù)方法消除了多徑帶來的測角誤差,但為了保證相控陣系統(tǒng)跟蹤性能的穩(wěn)定性,還必須設(shè)法補(bǔ)償多徑造成的信號衰落,使接收信號功率足以滿足跟蹤和數(shù)據(jù)解調(diào)要求。
假設(shè)實驗場景為平靜海面,載波頻率為6 GHz,目標(biāo)在200 m高度定高飛行。由于反射信號到達(dá)各接收天線路徑不同,使它們接收的信號不同時處于零點,至少有一個天線會收到較強(qiáng)的信號,從而減少了多徑衰落的影響。根據(jù)圖9,當(dāng)天線處于不同高度(10、15、20 m)時,或天線處于同一高度而工作在不同視線距離時,其接收信號都不同時處于谷點。這時空間分集是解決多徑衰落問題的最佳方案。如果使用兩個空間分離的天線來接收遙測信號,問題就變成了如何放置天線,以便當(dāng)一個天線處于無效狀態(tài)時,另一個天線處于峰值狀態(tài)。然后,將這些接收信號進(jìn)行適當(dāng)組合,就會使合成接收信號增強(qiáng),減少多徑衰落的影響。
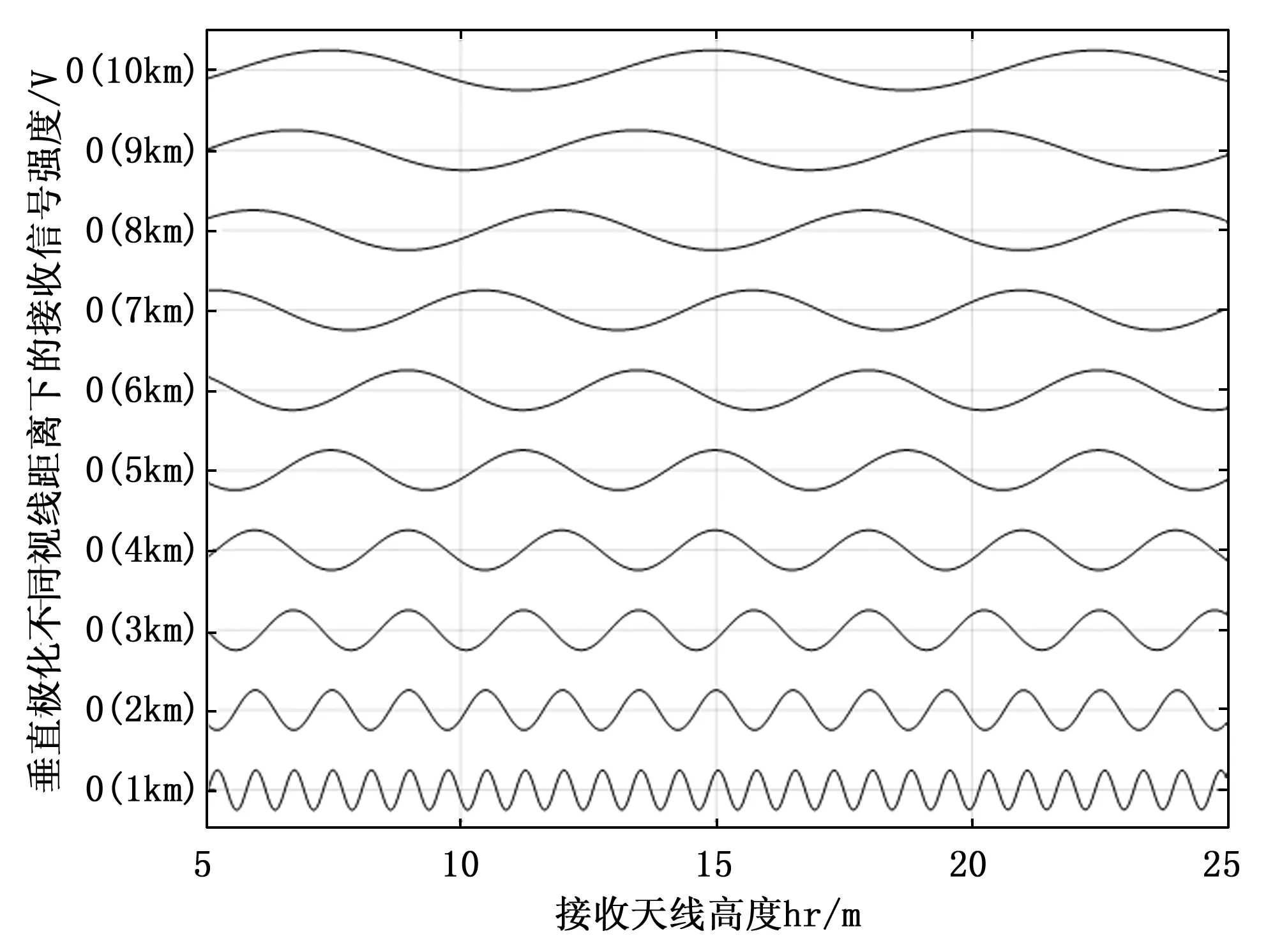
圖9 不同視線距離下接收信號強(qiáng)度隨接收 天線高度的變化曲線
空間分集技術(shù)的應(yīng)用可以使得到達(dá)這些陣元的反射信號路徑不同,從而減少多徑效應(yīng)的影響,然后通過計算機(jī)軟件仿真和現(xiàn)場實驗分析,我們可以得出每個特定多徑場景下的最佳空間分集距離,從而為相控陣系統(tǒng)陣間距離參數(shù)的設(shè)置提供參考。
常用的空間分集技術(shù)有:選擇合并分集、等增益合并分集、最大比合并分集。經(jīng)過理論與實踐證明,MRC分集是一種最佳的空間分集方案。它在提高分系統(tǒng)信噪比的同時完成了對于通信系統(tǒng)中斷概率優(yōu)化。
最大比合并的實現(xiàn)方式即通過給分集的N路不同信號乘以一個不同的系數(shù)ωi,i=1,2,3,…,N。如圖10所示,相控陣系統(tǒng)接收端采用MRC分集來優(yōu)化處理來自N個分集支路信道的接收信號,假設(shè)各支路信號獨立衰落且服從瑞利衰落分布。
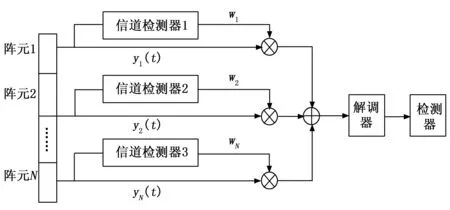
圖10 相控陣系統(tǒng)MRC分集接收機(jī)模型
假設(shè)第i支路接收信號表示為:
yi(t)=gi(t)s(t)+n(t)
(42)
其中:yi(t)是傳輸?shù)男盘枺琯i(t)是第i個支路上的衰落增益,n(t)是第i個支路上的噪聲。
其中各支路信號是同相的,在進(jìn)入分集合路器之前需要乘以一個加權(quán)系數(shù)ωi(等于各支路信號幅度與噪聲功率之比)。
4.1 瑞利衰落信道的中斷概率
情況一:設(shè)x1,x2,…,xn為n個獨立服從指數(shù)分布的隨機(jī)變量:
fxi(xi)=βiexp(-βixi),xi>0
(43)
假設(shè)參數(shù)βi(i=1,2,3,…)都是不同的,則Sn=x1+x2+…+xn的概率分布函數(shù):
(44)
情況二:設(shè)x1,x2,…,xn為n個獨立服從指數(shù)分布的隨機(jī)變量,不要求參數(shù)βi(i=1,2,3,…,N)都是不同的,假設(shè)其中有r個不同的參數(shù)1 (45) 其中:ki(i=1,…,r)表示MRC各分集支路功率中與βi(i=1,…,r)具有相同功率的支路數(shù)。 密度函數(shù)(PDF,probability density function) (46) 其中:N表示MRC分集的分支數(shù),p1表示情況一功率的符號。 (47) 其中:p2表示情況二功率的符號。 圖11為(情況二)四支路MRC分集在瑞利衰落信道下的PDF與信噪比γ的關(guān)系,表2給出了4個不等功率瑞利分支的平均信噪比。 圖11 四支路MRC分集在瑞利衰落信道下的 理論與實際PDF與信噪比γ的關(guān)系 表2 四個瑞利衰落分支下的平均信噪比γdB 圖11中的仿真結(jié)果顯示與理論結(jié)果完全一致。從圖中觀察可以得出表2給出的四個瑞利分支下的平均信噪比對應(yīng)的MRC分集合路輸出信噪比主要集中在5~35 dB。 研究采用Matlab軟件進(jìn)行低仰角跟蹤算法的仿真與分析,采用目標(biāo)仰角下單脈沖測角的最小均方根誤差(RMS,root mean square)性能作為低角跟蹤算法的評判標(biāo)準(zhǔn)。假設(shè)試驗場景為平靜海面,垂直地面放置的均勻線陣陣元數(shù)為16,測控站高度為5 m,目標(biāo)飛行高度為5 km,SNR=15 dB,發(fā)射信號中心頻率為f0=5 GHz,相對帶寬BW=20%。假設(shè)f1=4.5 GHz,根據(jù)式(41)可以計算出該頻段內(nèi)輸出功率差值最大時對應(yīng)的頻率f2=4.9 GHz。 則當(dāng)f1=4.5 GHz,f2=4.9 GHz時,改進(jìn)單脈沖測角法與采用中心頻率f0=5 GHz的傳統(tǒng)單脈沖測角法的跟蹤性能對比如圖12所示。根據(jù)圖中結(jié)果可以看出:在低仰角環(huán)境下(θt<3°時)傳統(tǒng)單脈沖測角法的測角誤差在1.5°左右,相控陣系統(tǒng)的無法實現(xiàn)目標(biāo)的準(zhǔn)確跟蹤。對比傳統(tǒng)單脈沖測角法,改進(jìn)單脈沖測角法的測角誤差由之前的1°左右降低到0.1°以下,系統(tǒng)的跟蹤性能明顯提高。綜上所述,改進(jìn)單脈沖測角技術(shù)的應(yīng)用實現(xiàn)了相控陣系統(tǒng)對于低仰角目標(biāo)的穩(wěn)定精密跟蹤,具有良好的工程實用價值。 圖12 系統(tǒng)改善前后跟蹤性能對比 介紹了多徑效應(yīng)模型與機(jī)理,分析了多徑效應(yīng)對于單脈沖系統(tǒng)低仰角跟蹤性能的影響及傳統(tǒng)單脈沖測角技術(shù)的局限性,并根據(jù)這一問題提出了利用相鄰差波束相位跳變構(gòu)造對稱波束的改進(jìn)單脈沖測角技術(shù)。結(jié)合理論分析與仿真結(jié)果可以發(fā)現(xiàn),改進(jìn)單脈沖測角技術(shù)能夠有效克服多徑效應(yīng)對單脈沖系統(tǒng)跟蹤精度的影響,并且跟蹤精度改善效果明顯。由于低仰角環(huán)境下鏡面反射信號、漫反射信號進(jìn)入相控陣天線波束主瓣,系統(tǒng)測得的角誤差電壓會受到來自于鏡像目標(biāo)的干擾,嚴(yán)重影響跟蹤精度。因此,解決低角跟蹤問題的關(guān)鍵在于將目標(biāo)與鏡像目標(biāo)區(qū)分開來。本文利用飛行目標(biāo)在相控陣系統(tǒng)接受端相鄰脈沖采樣時刻內(nèi)運動狀態(tài)保持不變的特性,控制數(shù)字移相器實現(xiàn)差波束相跳變構(gòu)造對稱波束,并引入頻率分級技術(shù),通過對和波束、差波束及其單脈沖比的運算巧妙地將直射和波束、直射差波束、反射和波束、反射差波束分離開來,從而準(zhǔn)確測得目標(biāo)的角度信息。但是改進(jìn)單脈沖測角技術(shù)方法的測角精度受頻段選擇與信噪比的影響較大,因而在實際工程應(yīng)用當(dāng)中需要對此進(jìn)行嚴(yán)格甄選。
4.2 瑞利信道MRC分集各支路平均信噪比的概率

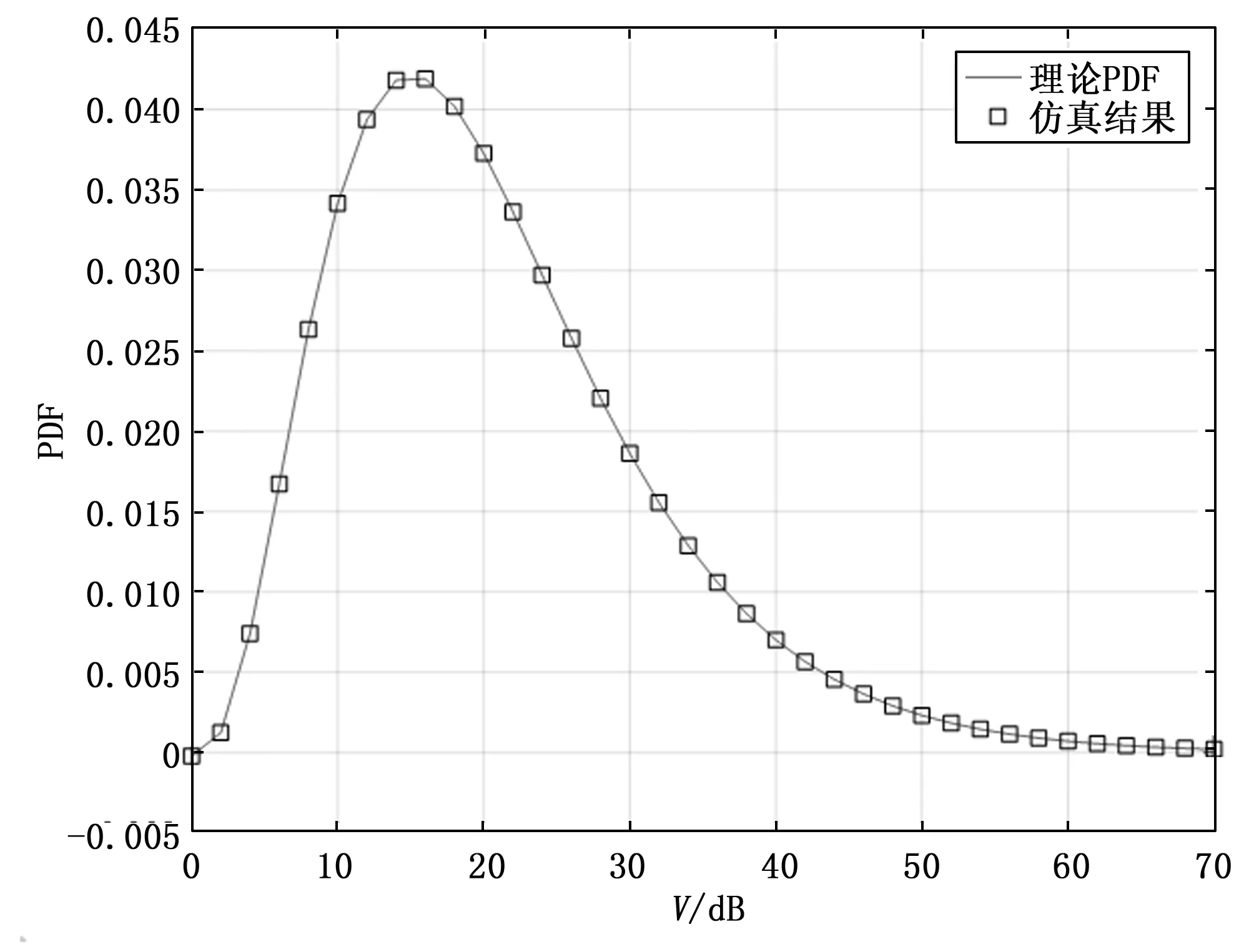

5 系統(tǒng)性能分析
6 結(jié)束語
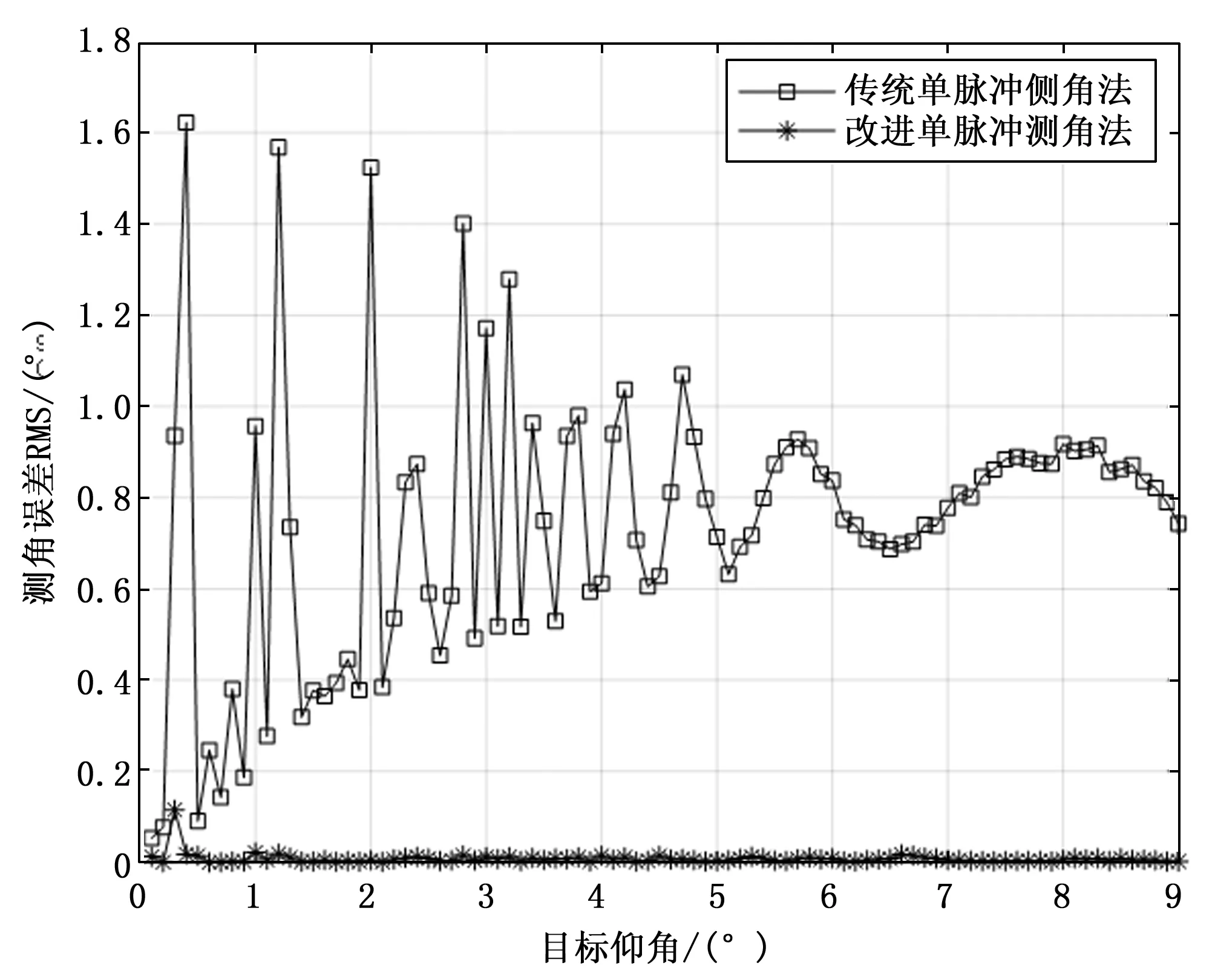
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
