基于SVM的捷變頻雷達密集轉發干擾智能抑制方法
2023-03-06 09:00:32杜思予劉智星吳耀君沙明輝全英匯
雷達學報 2023年1期
杜思予 劉智星 吳耀君 沙明輝 全英匯*
①(西安電子科技大學電子工程學院 西安 710071)
②(北京無線電測量研究所 北京 100854)
1 引言
數字射頻存儲器 (Digital Radio Frequency Memory,DRFM) 具有高速采樣并復制雷達發射信號的能力,因此廣泛應用于電子對抗領域。基于DRFM的干擾機將截獲的雷達發射信號延時疊加后重復轉發,由于與雷達發射信號高度相關,干擾信號不僅在時域覆蓋目標回波,同樣也會獲得匹配濾波增益,沿距離維形成密集假目標,使得雷達系統無法檢測或跟蹤真實目標[1-7]。
目前,針對密集轉發干擾的抑制方法通常基于“干擾重構與對消”和“多域特征差異抗干擾”兩個思路。文獻[8]通過自適應濾波從時-頻解耦后的回波信號中估計出干擾參數并對消干擾信號,從而恢復出真實目標回波。針對間歇采樣轉發式干擾,文獻[9]通過脈壓數據提取干擾參數重建干擾信號,然后與回波信號自適應對消。但這兩種方法要求解耦精度和參數估計準確,否則會導致目標信號衰減或發生畸變。文獻[10]根據目標和干擾在變換域的特征差異,利用奇異值差分譜分選目標回波和干擾信號。張亮等人[11]提出了一種脈間調頻斜率捷變雷達信號來增強目標與干擾在分數階傅里葉域的差異性,從而去除干擾信號。文獻[12]假設密集轉發干擾多普勒集中分布于有限個鄰域內,利用干擾和目標信號頻域差異性實現干擾抑制。文獻[13,14]從空間角度差異出發,分別采用盲源分離和自適應旁瓣對消技術抑制干擾。綜合空-時二維特性,文獻[15]提出一種脈沖重復周期捷變聯合空域濾波的方法來對抗密集轉發干擾。但是,當轉發干擾的密集度與逼真性進一步提高,干擾與目標在多域重疊時,以上方法失效。
此外,由于匹配濾波后,目標回波能量在距離-多普勒平面上積累,形成一條平行于多普勒維的直線軌跡,根據這一特性,文獻[16,17]分別利用不同算法檢測目標所在距離單元,剔除干擾并保留目標運動軌跡。上述方法避免了參數估計誤差對干擾抑制效果的影響,在干擾和目標多域重合時依然有效,但當目標直線淹沒在噪聲和干擾中,較少或難以檢測到有效的目標軌跡點時,上述方法的抗干擾性能下降。
針對以上問題,本文借鑒智能算法在雷達輻射源識別與分類領域的應用,提出一種基于支持向量機 (Support Vector Machine,SVM) 的捷變頻雷達密集轉發干擾智能抑制方法。首先,根據匹配濾波后目標和干擾信號分布差異提取設計典型特征參數;接著,構建參數隨機的多樣化樣本集用于SVM模型訓練,并利用最優SVM模型實時地、智能化地分類干擾和目標;然后,通過平滑濾波剔除目標距離單元內的部分干擾;最后,基于壓縮感知(Compressed Sensing,CS) 理論實現二維高分辨重構,完成對真實目標的檢測。
2 信號模型
2.1 捷變頻雷達信號
捷變頻雷達體制由于脈間載頻快速、隨機跳變,使得干擾機無法準確預測下一個脈沖的頻率,從而達到規避干擾的效果[18-20]。假設基帶波形采用線性調頻 (Liner Frequency Modulation,LFM)信號,則捷變頻雷達信號模型表示為
其中,fc為 雷達初始載頻;cq ∈{1,2,...,Q}為第q個發射脈沖的頻率調制碼字,Δf為最小跳頻間隔。捷變頻雷達發射信號模型示意圖如圖1所示。

圖1 捷變頻雷達信號模型Fig.1 Frequency agile radar signal model
假設觀測場景中存在K個運動目標,第k個目標對應的初始徑向距離和徑向速度分別為rk,vk,且目標起伏模型均為Swerling I型,則雷達接收機接收到的目標回波信號可以表示為
其中,=2(rk-vk(q-1)Tr)/c為第k個目標的第q個脈沖回波信號與發射信號之間的時延,c為光速,Ak為第k個目標回波的幅值;β(t)為隨機高斯白噪聲。進一步地,回波脈沖與對應載頻fq進行混頻、匹配濾波處理后的輸出為
2.2 密集轉發干擾信號
干擾機在對雷達發射信號進行全脈沖采樣后,對采樣到的信號逐個延遲不同時長并疊加轉發,從而形成密集轉發干擾[21]。該干擾方式同時避免了全脈沖采樣后直接轉發導致的假目標稀疏問題和間歇采樣轉發時采樣時長對假目標密集度的限制,理論上可以實現任意密集度的假目標干擾,其產生原理如圖2所示。假設干擾機對截獲的第q個雷達發射信號進行延遲疊加轉發,則產生的密集轉發干擾信號可以表示為
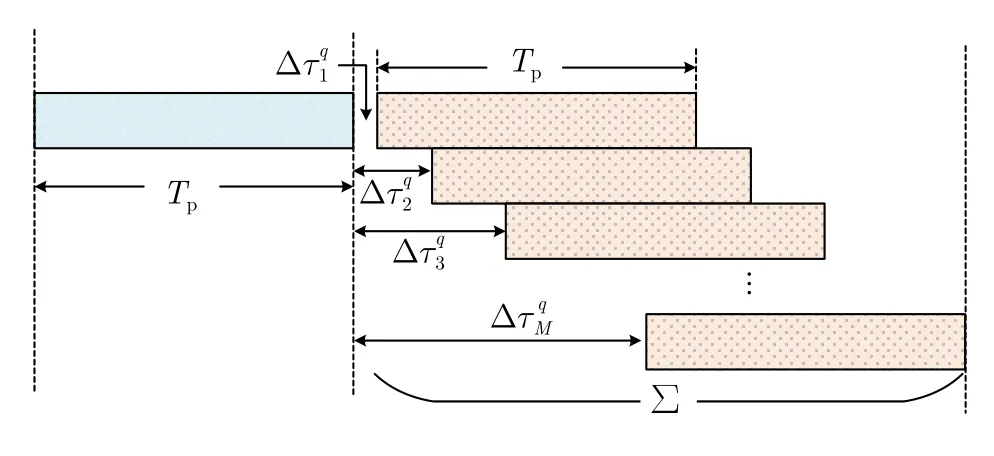
圖2 密集轉發干擾原理圖Fig.2 Dense repeated jamming principle diagram
其中,M為干擾轉發次數,Aj,m為第m次轉發干擾的幅值;為第m次轉發干擾相對于第q個脈沖回波的時延。如果干擾機的工作帶寬為[fj1,fj2],則捷變頻雷達接收到的第q個脈沖回波信號可以表示為
經過下混頻和匹配濾波處理之后的輸出為
3 基于SVM的智能干擾抑制算法
SVM是由Vapnik和Cortes等人于1995年提出的一種基于監督學習的二元廣義線性分類器,其可以通過核函數進行高維映射實現非線性分類,求解出訓練樣本的最大邊距超平面作為決策邊界,完成對訓練樣本的識別與分類[22]。
由于SVM對小樣本、非線性及高維類具有良好的分類效果,目前廣泛應用于雷達輻射源分類、識別領域[23,24]。類似地,本文將這種分類思想遷移到對干擾信號和目標回波的識別與分類問題上,利用密集轉發干擾和目標回波匹配濾波之后在距離-多普勒平面上的特征差異性設計兩個典型特征參數,通過SVM模型對樣本數據集進行自動特征提取、類別預測,實現密集轉發干擾智能化抑制。圖3給出了基于SVM的捷變頻雷達密集轉發干擾智能抑制算法流程圖。
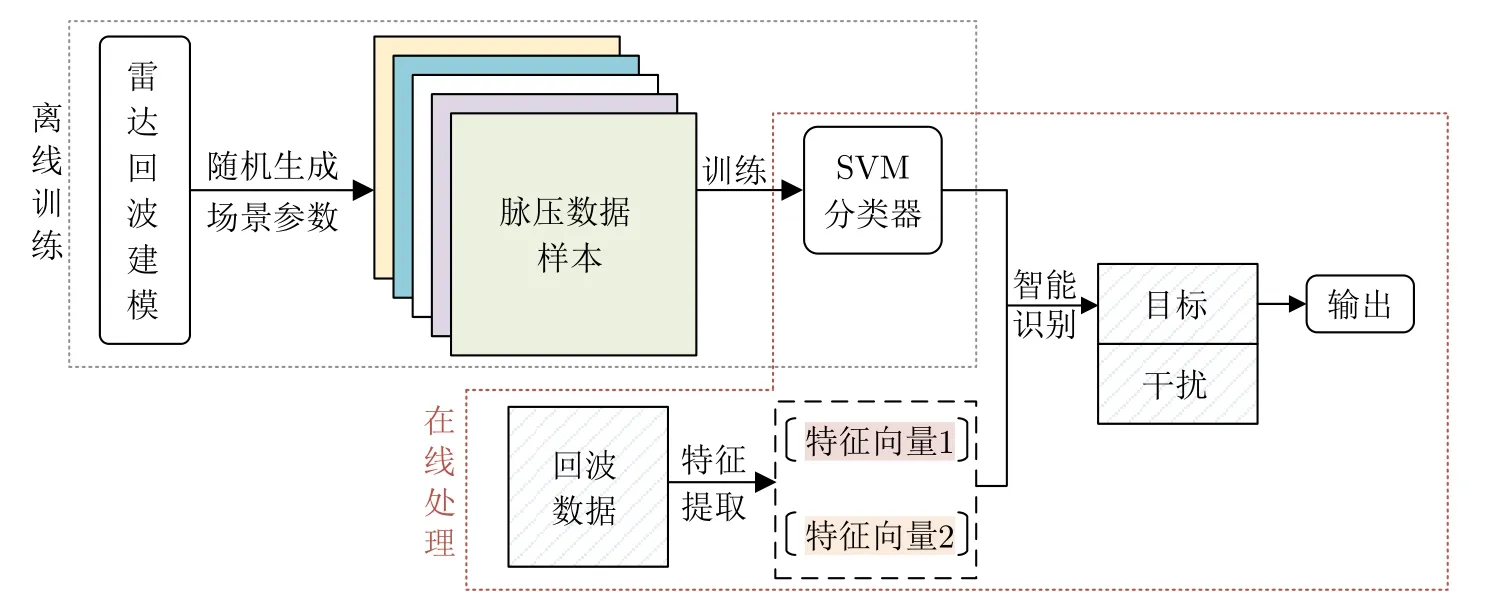
圖3 干擾抑制算法流程圖Fig.3 Flow chart of interference suppression algorithm
3.1 特征參數選擇
從式(6),式(7)可以看出,在捷變頻雷達體制下,運動目標經過脈沖壓縮之后,能量積累在相同距離單元內,呈現出一條平行于慢時間維的直線;而密集轉發干擾是對所截獲的雷達發射信號進行延時疊加轉發,因此在脈沖壓縮后能量離散分布于快-慢時間二維平面中。換言之,密集轉發干擾和目標回波在距離向和方位向的稀疏度各不相同,如圖4(a)所示,干擾信號沿距離向密集分布,沿方位向稀疏分布;目標信號沿距離向是稀疏的,但沿方位向是連續的。當采樣率較低或目標運動速度非常大時,會發生距離徙動,在快-慢時間平面上表現為目標直線傾斜,如圖4(b)所示。一般情況下,距離徙動較小,本文所提算法依然能夠實現目標識別和干擾抑制,但當距離徙動較大時,需要先通過相應算法進行校正,再進行抗干擾處理。本文所提算法和仿真實驗均假設距離徙動較小或已進行距離徙動校正。

圖4 匹配濾波數據空間分布特征Fig.4 Matching filtering data spatial distribution characteristics
假設匹配濾波后的數據矩陣表示為DQ×L,其中Q為脈沖數,L為距離單元數,第q個脈沖、第l個距離單元對應的幅值表示為Aq,l,則本文所設計的兩個特征參數如下:
特征參數1:取數據矩陣DQ×L中的每一個距離單元對應的列向量dl,沿方位向計算當前單元Aq,l縱向鄰域內幅值差異度,即
其中,[q-ω,q+ω]表 示鄰域長度。當q≤ω時,縱向鄰域取 [1,q+ω] ;當q≥Q-ω時,縱向鄰域取[q-ω,Q]。
計算dl中每個單元對應的幅值差異度Δ,并沿方位向求和,即特征參數1為
若匹配濾波后,目標位于第l1個距離單元,任一假目標位于第l2個距離單元,根據式(8)分別計算出dl1和dl2對應的Q個幅值差異度。受干擾帶寬限制,捷變頻雷達只有部分脈沖被截獲并形成密集轉發干擾,因此目標和干擾沿距離向的稀疏度不同,則計算出的,進一步地,求和后應有。
特征參數2:取數據矩陣DQ×L中的每一個脈沖對應的行向量dq,沿距離向以步長Δω在鄰域[l-ω,l+ω]內統計幅度差異值,且ω=IΔω,I ∈Z,即
其中,當l ≤ω時,為便于計算,橫向鄰域取原來的一半,即[l,l+ω];同樣地,當l≥L-ω時,橫向鄰域取[l-ω,l]。
由于密集轉發干擾在匹配濾波之后沿距離維形成多個鄰近的假目標群,橫向鄰域內幅值差異度較小,而目標信號橫向鄰域內僅存在大量噪聲信號,幅值差異度較大,因此求和計算出的。圖5為上述特征參數計算示意圖。

圖5 特征參數計算示意圖Fig.5 Schematic diagram of characteristic parameter calculation
3.2 SVM算法
本文將人工智能算法應用于雷達抗干擾領域,通過對密集轉發干擾樣本數據進行離線訓練,構建最優SVM分類模型,實現對回波數據智能化準確識別、分類,進而實現干擾智能抑制,具有實時性和魯棒性良好等優勢。具體步驟如下:
步驟3 選取合適的核函數F和懲罰參數C>0,SVM模型求解最大分割超平面wT·X+b=0的問題可以表示為以下約束最優化問題
其中,w為法向量,決定超平面方向,b為位移項,決定超平面與原點之間的距離。利用Karush-Kuhn-Tucker (KKT)條件和拉格朗日乘子法可以將原問題(12)轉化為求解以下對偶問題[25]
且KKT條件為
其中,αz為拉格朗日乘子,F為高斯核函數,其不需要先驗信息;參數σ控制核函數的性能,也稱為徑向基核函數(Radial Basis Function,RBF),具體表達式為
式(13)是一個有約束的凸優化問題,求解上述問題得到最優解α*=[...]T。
步驟4 根據所求得的最優解α*計算出最優法向量w*和最優位移項b*

其中,s ign(x)為符號函數。
步驟6 對一個CPI內的密集轉發干擾實時回波數據 (rpc)Q×L[進行智]能識別與分類,其對應的特征向量為,則決策函數f(xl)=1的類別為目標,決策函數f(xl)=-1的類別為干擾信號,保留目標信號并抑制判決為干擾類的回波數據
3.3 平滑濾波和二維重構
經過上述SVM智能識別與分類后,非目標距離單元內的干擾信號被抑制掉,但當干擾機轉發次數較多或轉發時延較長時,將有部分點干擾落在目標所在距離單元。這些干擾的幅度遠大于目標幅度,會在相參積累之后形成較高旁瓣,嚴重影響目標檢測。為了解決這一問題,本文采用平滑濾波來抑制點干擾。
平滑濾波是一種用于消除圖像中的噪聲或失真的圖像處理方法[26-28]。經過干擾抑制后的回波數據中,目標信號的幅度在一定范圍內變化,而干擾信號幅值明顯大于該范圍,相當于圖像中的“噪點”,因此可以通過平滑濾波將其剔除。假設平滑窗口為Nw,對干擾抑制后的目標所在距離單元列向量dtar進行濾波,如圖6所示。

圖6 平滑濾波Fig.6 Smoothing window filtering
平滑濾波表達式為
其中,dtar(q)為當前平滑濾波單元,且q′≠q,ρ為加權因子。經過平滑濾波后,可以認為回波數據中僅包含目標信號和噪聲,表示為
考慮到目標場景通常具有稀疏特性,因此采用CS理論進行二維重構實現脈間相參積累[29-32]。分別以距離單元數L和一個CPI內的脈沖數Q對距離維和速度維進行網格劃分,則目標回波可以改寫為
其中,Al,q為當前單元幅值,φl(q),φq(q)分別為距離相位項和速度相位項,所構成的字典矩陣為
其中,el,q=φl(q)⊙φq(q),⊙表示哈達瑪積。則式(20)重新改寫為
其中,θl表示待求解的第l個距離單元的二維重構向量,βl表示當前距離單元噪聲向量。通過求解如下?2范 數可以獲得未知向量θ的估計值,進而獲得目標的距離和速度信息,完成目標檢測。
4 實驗結果與性能分析
為了驗證所提基于SVM的捷變頻雷達密集轉發干擾智能抑制方法的有效性,本文設置2組實驗:(1)仿真分析所提算法對密集轉發干擾的抑制效果;(2)實測數據驗證所提算法的干擾抑制效果;并在4.3節對所提算法性能進行了評估與分析。
首先生成用于SVM模型訓練的隨機樣本數據集。假設場景中存在單個點目標,初始徑向距離r ∈[3000,4000]m,徑向速度v=50 m/s,回波信噪比(Signal to Noise Ratio,SNR)設置為0 dB。干擾機對雷達發射脈沖進行全采樣,轉發次數M=80,干擾轉發時延Δτm分布在[100,300] ns區間內,干信比(Jamming to Signal Ratio,JSR)設置為20 dB。其他雷達參數如表1所示。

表1 雷達參數Tab.1 Radar parameters
基于上述參數,仿真生成N=500個CPI目標距離不同、密集轉發干擾分布不同的回波脈壓數據矩陣,計算出目標所在距離單元及其左右各20個隨機距離單元對應的特征向量作為訓練樣本集,即樣本總數Z=20500個。核函數使用RBF,訓練得到的最優SVM分類模型如圖7所示。

圖7 最優SVM分類模型Fig.7 Optimal SVM classification model
4.1 仿真實驗驗證
設置場景中存在2個點目標,初始徑向距離r1=4000 m,r2=4100 m,徑向速度v1=50 m/s,v2=70 m/s,平滑濾波窗口Nw=10,濾波次數filtertime=5,其他仿真參數同上。基于SVM的捷變頻雷達抗密集轉發干擾仿真實驗結果如圖8所示。圖8(a)和圖8(b)分別為回波信號脈壓結果及其俯視圖,可以看到,干擾機疊加轉發雷達發射信號,形成大量時延不同的密集假目標,雖然利用脈間載頻捷變能夠在頻域上主動規避干擾信號,但仍有部分脈沖回波信號中存在較強的干擾。圖8(c)為信號分類結果,已經訓練好的SVM模型能夠將干擾信號和目標信號較為精準地分離,實現了智能化干擾識別和分類。圖8(d)為本文所提算法干擾抑制后脈壓結果,與回波脈沖相比,本文所提算法有效抑制了密集轉發干擾,但是仍有部分干擾落在目標所在距離單元形成點干擾。采用平滑濾波處理之后的脈壓結果如圖8(e)所示,可以看到,干擾信號被完全剔除,且目標信息較為完整地保留下來,相參積累結果為圖8(f),目標距離測量值為4000 m和4100 m,速度測量值50.2232 m/s和71.1496 m/s,誤差均在合理范圍內。
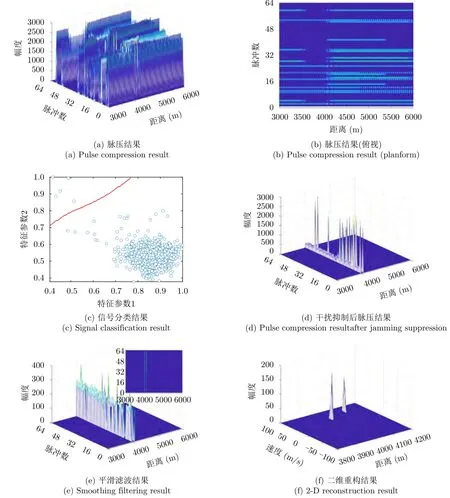
圖8 抗干擾仿真結果Fig.8 Anti-jamming simulation results
4.2 實測數據驗證
在外場試驗場景中,雷達采用捷變頻體制探測海上艦船目標,干擾機位于目標艦船上,對雷達實施密集轉發干擾,部分外場試驗參數如表2所示。
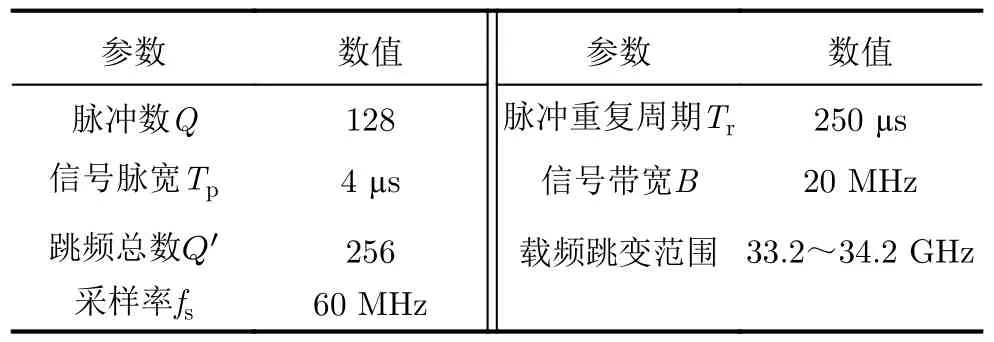
表2 外場試驗參數Tab.2 Outfield experiment parameters
圖9為外場對抗試驗實測數據處理結果。圖9(a)和圖9(b)為實測回波數據的脈壓結果及其俯視圖,部分脈沖沿距離維存在幅度不同、轉發時延不等的密集轉發干擾。根據目標和干擾在距離-多普勒二維平面上的分布特性,計算特征參數并采用訓練好的SVM模型對目標和干擾進行分類,分類結果如圖9(c)所示。圖9(d)為干擾抑制結果,與圖9(b)相比,密集轉發干擾被有效抑制,目標信號被完整保留,驗證了基于SVM的密集轉發干擾抑制算法的有效性,同時驗證了SVM模型具有良好的泛化能力,對于訓練樣本之外的數據同樣具有良好的干擾抑制效果。圖9(e)為平滑濾波結果,落在目標距離單元內的干擾信號被濾除,經過二維高分辨重構后的結果如圖9(f)所示。
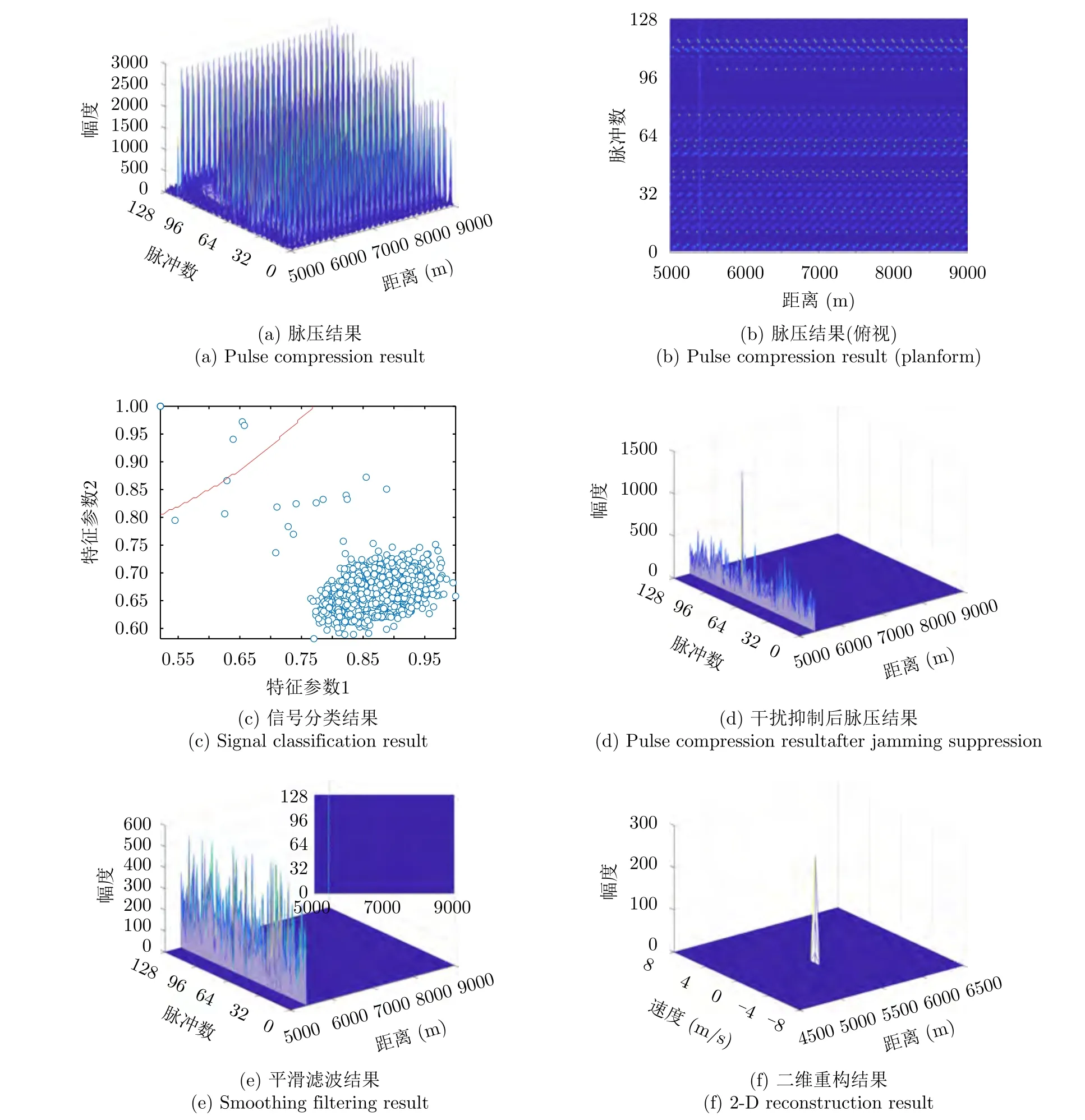
圖9 實測數據處理結果Fig.9 Measured data processing results
4.3 性能分析
在本文中,為了更好地評估所提算法的干擾抑制效果,定義分類準確率為:在當前蒙特卡羅實驗中,SVM模型正確分類目標數據(即目標數據被劃分為+1類)時,被分為+1類的干擾數據占總數據數的比例;這一前提是SVM模型將目標樣本正確劃分到+1類,反之,則認為此次分類結果錯誤,即準確率為0;總共統計500次蒙特卡羅實驗結果。
分類準確率決定了所提算法的干擾抑制效果,分類準確率越高,非目標距離單元的干擾信號抑制得越干凈。圖10為不同SNR條件下,信號分類準確率隨JSR變化關系曲線。可以看到,在JSR≤40 dB時,所提算法對目標和干擾信號的分類準確率均能達到95%以上;隨著JSR不斷增大,低信噪比情況下,算法性能有所下降;但是總體來看,所提算法在不同條件下均能保持較高的分類準確率。

圖10 分類準確率隨JSR變化曲線Fig.10 The curve of classification accuracy changing with JSR
JSR從30~50 dB變化,分別選用總樣本數的2%,4%,6%,8%和10%作為訓練樣本建立SVM分類模型,對隨機生成的測試樣本進行智能化識別與分類,500次蒙特卡羅實驗結果如圖11所示。可以看到,SVM分類器在小樣本情況下也能夠較為精準地分離目標和干擾,當JSR=60 dB,訓練樣本數僅為總樣本數的2%(樣本大小為102)時,所提方法的分類準確率依然能夠達到60%以上,在JSR≤40 dB時,小樣本訓練得到的SVM模型對信號的分類準確率保持在95%以上,換言之,本文構建的干擾抑制算法模型具有良好的泛化能力,適用性更強。

圖11 分類準確率隨訓練樣本比例變化曲線Fig.11 The curve of classification accuracy changing with the proportion of training set
定義目標信息保留度為干擾抑制后,目標所在距離單元內非零脈沖數占總脈沖數的比值,抑制干擾的同時最大限度保留目標信息有利于后續的相參積累和目標檢測處理。對比文獻[16,17]算法,本文所提算法在干擾抑制前不經過二值化處理,因此目標信息損失程度較低,且不受干信比影響,如圖12(a)所示。圖12(b)-圖12(g)為JSR=60 dB時不同算法的干擾抑制結果。文獻[16]的干擾抑制算法在高干信比條件下失效,目標信息丟失;而文獻[17]算法沒有剔除目標距離單元的干擾,同時保留了目標信息和干擾信號,對后續的目標檢測產生影響;本文算法中平滑濾波效果與窗口Nw的大小和濾波次數filtertime有關,Nw過小時,點干擾無法被完全抑制,且容易造成目標信息丟失,當干擾較強時,落在目標距離單元的干擾或干擾旁瓣幅度不同,單次濾波能夠濾除部分干擾,但干擾旁瓣會保留下來。因此,合理設置Nw和filtertime能夠確保干擾及干擾旁瓣被完全抑制的同時盡可能保留完整的目標信息。
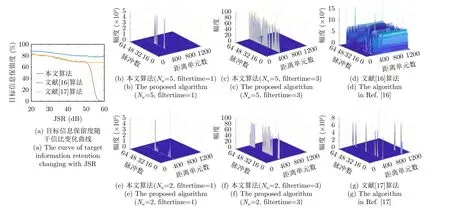
圖12 目標信息保留度Fig.12 The target information retention percentage
設置虛警率Pfa=10-6,圖13顯示了相同仿真環境下,3種算法的檢測概率隨JSR變化曲線。文獻[17]算法在干擾能量較強時失效,而本文算法和文獻[16]算法進一步抑制了目標距離單元內的干擾,有效提高了目標的檢測概率;此外,本文采用SVM算法對回波數據進行智能化分類,干擾抑制效果僅與已訓練模型有關,模型分類精度較高時,在不同JSR情況下均能正確檢測出真實目標,所提抗干擾算法具有良好的泛化能力。以JSR為變量,虛警率Pfa為參變量,仿真得到本文算法在不同虛警率下的檢測概率隨JSR變化曲線如圖14所示。可知,當虛警率一定時,檢測概率隨著JSR增大而減小;但是,由于干擾旁瓣和目標幅度相近,落在目標單元內的干擾旁瓣難以濾除,導致檢測概率在JSR=40 dB附近形成凹口;當虛警率Pfa≥10-8時,隨著JSR增大,本文算法均能保持良好且較穩定的干擾抑制性能,目標檢測概率均在80%以上。

圖13 不同算法在不同JSR下的檢測概率Fig.13 Detection probability of different algorithms under different JSR

圖14 不同虛警率下檢測概率隨JSR變化曲線Fig.14 The curve of detection probability changing with JSR under different false alarm rates
5 結語
本文將機器學習領域的SVM算法應用到雷達抗干擾處理中,通過已訓練模型智能化分離干擾和目標,有效抑制了密集轉發干擾。仿真實驗和實測數據處理結果表明,與現有算法相比,本文所提方法具有以下優勢:(1)不依賴干擾和目標的多域特征差異,適用范圍更廣;(2)在訓練樣本較少時,SVM分類器依然保持良好的分類精度,能夠滿足雷達系統檢測目標的實時性,具有良好的泛化能力;(3)采用圖像處理中的平滑濾波進一步濾除目標距離單元內的部分干擾,極大提升雷達對真實目標的檢測概率;(4)算法邏輯和模型較簡單,具有一定的工程實際意義。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00