泊車(chē)機(jī)器人在智能停車(chē)庫(kù)中的應(yīng)用研究
2023-03-06 09:50:00張書(shū)景馬驚鳴康文茂呂紅軍
智能城市 2023年12期
關(guān)鍵詞:智能
張書(shū)景 江 瑋 馬驚鳴 車(chē) 行 康文茂 呂紅軍
(北京德威佳業(yè)科技有限公司,北京 101300)
公開(kāi)數(shù)據(jù)顯示,截至2023年6月底,內(nèi)地全國(guó)機(jī)動(dòng)車(chē)保有量突破4.26億輛,其中汽車(chē)3.28億輛、新能源汽車(chē)1 620萬(wàn)輛[1]。因此,停車(chē)位難找、停車(chē)空間不足等一系列停車(chē)問(wèn)題成為當(dāng)前制約城市發(fā)展的主要因素之一。為減緩?fù)\?chē)難帶來(lái)的城市管理和交通壓力,大型智能化停車(chē)場(chǎng)應(yīng)運(yùn)而生。一方面,停車(chē)場(chǎng)的智能化主要體現(xiàn)在機(jī)械智能方面,研究者們相繼開(kāi)發(fā)出九大類(lèi)車(chē)庫(kù)類(lèi)型,分別是升降橫移、簡(jiǎn)易升降、垂直循環(huán)、水平循環(huán)、多層循環(huán)、平面移動(dòng)、巷道堆垛、垂直升降、圓形塔庫(kù)。另一方面,停車(chē)場(chǎng)的智能化主要體現(xiàn)在泊車(chē)設(shè)備的智能方面。按照泊車(chē)設(shè)備行走時(shí)是否需要軌道輔助,可以分為有軌車(chē)庫(kù)和無(wú)軌車(chē)庫(kù)兩大類(lèi)[2]。無(wú)軌車(chē)庫(kù)又稱(chēng)機(jī)器人停車(chē)庫(kù),車(chē)輛存取中的搬運(yùn)動(dòng)作需要由自動(dòng)導(dǎo)引車(chē)(AGV)完成。AGV按照整個(gè)停車(chē)庫(kù)中車(chē)位的實(shí)時(shí)空閑或占用情況,智能選擇最優(yōu)停泊的空車(chē)位,按照實(shí)時(shí)規(guī)劃出的最佳路徑,將車(chē)輛搬運(yùn)到對(duì)應(yīng)的車(chē)位中。可以看出,AGV智能停車(chē)庫(kù)的智能化程度、技術(shù)復(fù)雜性和先進(jìn)性相比傳統(tǒng)有軌智能庫(kù)高很多。
1 AGV泊車(chē)機(jī)器人
AGV是一種靈活性和智能性非常高的搬運(yùn)車(chē),本質(zhì)上屬于移動(dòng)機(jī)器人范疇,現(xiàn)已在智能倉(cāng)儲(chǔ)物流、港口碼頭、生產(chǎn)加工車(chē)間等各類(lèi)工業(yè)生產(chǎn)領(lǐng)域中得到了廣泛應(yīng)用。智能停車(chē)AGV雛形最早出現(xiàn)于2008年,日本東北大學(xué)研究團(tuán)隊(duì)設(shè)計(jì)出iCARTⅠ自動(dòng)導(dǎo)引車(chē)系統(tǒng)[3]。該系統(tǒng)由兩個(gè)獨(dú)立的機(jī)器人組成,工作時(shí)位于汽車(chē)的左右兩側(cè),通過(guò)4個(gè)升降桿對(duì)單側(cè)前后輪胎進(jìn)行支撐,同步協(xié)作完成對(duì)車(chē)輛的搬運(yùn)。2011年,該團(tuán)隊(duì)在iCARTⅠ的基礎(chǔ)上研制由4個(gè)獨(dú)立的機(jī)器人協(xié)同工作的iCARTⅡ自動(dòng)導(dǎo)引車(chē)。希臘塞薩斯德謨克里特大學(xué)研究人員于2015年研發(fā)出與iCARTⅡ類(lèi)似的AVERT自動(dòng)導(dǎo)引車(chē)。AVERT系統(tǒng)可以進(jìn)行全方位運(yùn)動(dòng),因此可以行駛到車(chē)輛下方對(duì)其進(jìn)行搬運(yùn)。iCART和AVERT都屬于多機(jī)協(xié)作的自動(dòng)導(dǎo)引車(chē)系統(tǒng),對(duì)機(jī)器人之間的協(xié)同感知、規(guī)劃和控制能力要求較高,因此工作安全系數(shù)較低。為了克服多機(jī)協(xié)作停車(chē)AGV系統(tǒng)的缺陷,一體式停車(chē)AGV應(yīng)運(yùn)而生。
我國(guó)智能停車(chē)AGV起步較晚,但近幾年已經(jīng)涌現(xiàn)出深圳怡豐和杭州海康機(jī)器人等多家優(yōu)秀企業(yè),研發(fā)水平也已走在世界同行業(yè)的前列[4]。深圳怡豐是國(guó)內(nèi)最早成功研發(fā)出梳齒型和車(chē)臺(tái)板型停車(chē)AGV的廠(chǎng)家,后續(xù)又研發(fā)出子母AGV和方舟AGV,在多個(gè)地區(qū)都有項(xiàng)目落地。杭州海康機(jī)器人公司依托海康威視多年來(lái)在圖像處理、硬件設(shè)計(jì)、嵌入式軟件、移動(dòng)機(jī)器人和機(jī)器視覺(jué)等領(lǐng)域的技術(shù)積累,研發(fā)的泊車(chē)AGV在第三屆互聯(lián)網(wǎng)大會(huì)期間于烏鎮(zhèn)試運(yùn)行使用。
2 基于AGV的智能停車(chē)庫(kù)系統(tǒng)
2.1 系統(tǒng)架構(gòu)
基于AGV的智能停車(chē)庫(kù)系統(tǒng)架構(gòu)如圖1所示。
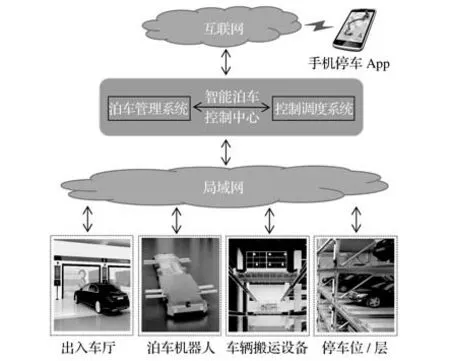
圖1 基于AGV的智能停車(chē)庫(kù)系統(tǒng)架構(gòu)
出入車(chē)廳:智能存取、檢查車(chē)輛并校正停車(chē)位置。
停車(chē)AGV:代客泊車(chē),實(shí)現(xiàn)人車(chē)分離。
車(chē)輛搬運(yùn)設(shè)備:升降機(jī)用于車(chē)輛上下移動(dòng),中跑車(chē)用于車(chē)輛左右移動(dòng),搬運(yùn)器使車(chē)輛出入泊位。
停車(chē)位/層:停泊車(chē)輛,判斷車(chē)位是否被占用。手機(jī)停車(chē)App:預(yù)約存取車(chē),在線(xiàn)支付。
2.2 工作流程
以平面移動(dòng)車(chē)庫(kù)和抱夾式AGV為例,用戶(hù)在手機(jī)停車(chē)App中輸入目的地,軟件具備導(dǎo)航功能,能夠快速規(guī)劃出到達(dá)目的地附近停車(chē)場(chǎng)的最優(yōu)路徑。此外,用戶(hù)還可以在App中輸入車(chē)牌號(hào)碼,提前預(yù)約目的停車(chē)場(chǎng)的車(chē)位。用戶(hù)到達(dá)車(chē)庫(kù)后,出入車(chē)廳門(mén)口的車(chē)牌識(shí)別系統(tǒng)能夠識(shí)別并記錄車(chē)輛的車(chē)牌號(hào)碼。車(chē)輛進(jìn)入出入車(chē)廳后,車(chē)廳中的各種檢測(cè)設(shè)備會(huì)對(duì)車(chē)輛的外形尺寸進(jìn)行檢測(cè),如果車(chē)輛的外形尺寸超出規(guī)定范圍,車(chē)廳會(huì)進(jìn)行報(bào)警、語(yǔ)音提示,車(chē)庫(kù)中的顯示屏?xí)嵝衍?chē)主駛離停車(chē)廳。車(chē)輛外形尺寸檢測(cè)合格后,車(chē)廳配備的活體檢測(cè)裝置會(huì)檢測(cè)車(chē)輛、車(chē)廳中是否有人員或動(dòng)物滯留。上述檢測(cè)合格后,車(chē)主便可使用出入車(chē)廳門(mén)口的客戶(hù)端引導(dǎo)操作界面進(jìn)行存車(chē)動(dòng)作。車(chē)主確認(rèn)存車(chē)后,車(chē)廳外部的快卷門(mén)就會(huì)關(guān)閉,車(chē)主便可自行離開(kāi)。出入車(chē)廳還配有車(chē)輛對(duì)中裝置,能夠?qū)⒋窜?chē)輛校正到準(zhǔn)確的位置,車(chē)主只需要將車(chē)輛停放到大概位置即可,能夠提升泊車(chē)體驗(yàn)感。隨后車(chē)廳內(nèi)部快卷門(mén)打開(kāi),停車(chē)AGV通過(guò)抱夾車(chē)輛輪胎的方式將車(chē)輛抬起,并把車(chē)輛搬入升降機(jī)中,升降機(jī)載車(chē)上升到指定停車(chē)層,再由已經(jīng)等在出入口的搬運(yùn)器把車(chē)輛搬入中跑車(chē)上,中跑車(chē)載著搬運(yùn)器以及待泊車(chē)輛進(jìn)行水平移動(dòng)并停在泊位前,搬運(yùn)器把車(chē)輛送入泊位中,完成存車(chē),取車(chē)則動(dòng)作相反。客戶(hù)在取車(chē)時(shí)除了可以使用車(chē)廳門(mén)口的客戶(hù)端操作界面,還可以通過(guò)手機(jī)App預(yù)約取車(chē),停車(chē)庫(kù)可以在客戶(hù)前往車(chē)庫(kù)取車(chē)途中完成取車(chē)動(dòng)作,使車(chē)輛在出入車(chē)廳中等待車(chē)主,縮短車(chē)主等待時(shí)間。
2.3 AGV關(guān)鍵技術(shù)
2.3.1 車(chē)輛交換技術(shù)
以車(chē)輛交換技術(shù)[5]劃分,AGV包括車(chē)板式、梳齒式、夾持式。車(chē)輛交換技術(shù)對(duì)比如表1所示。
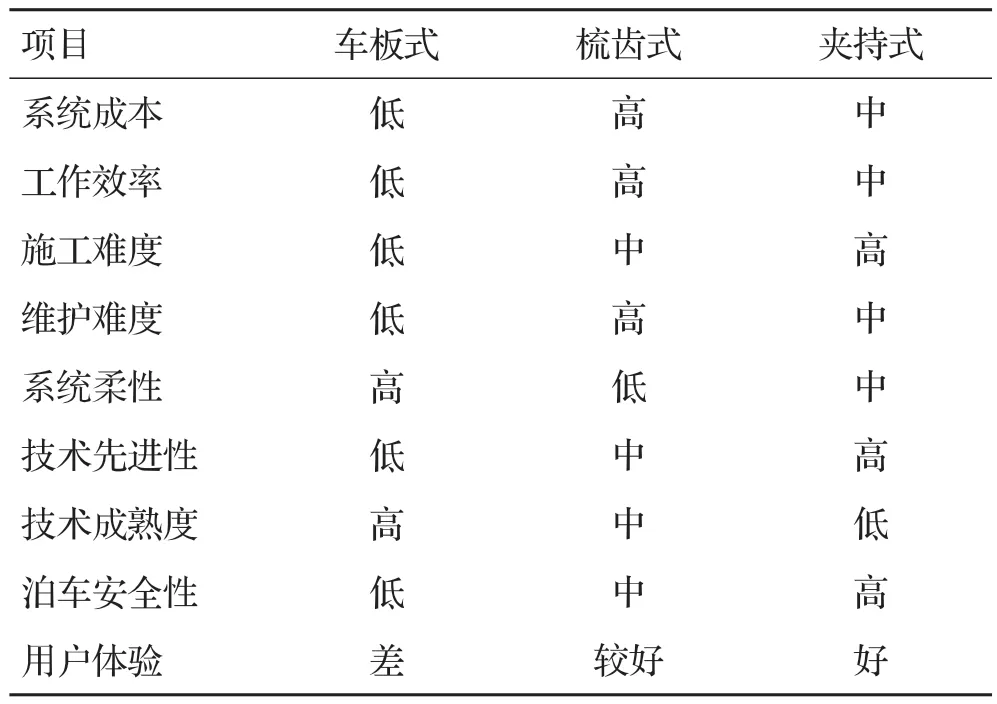
表1 車(chē)輛交換技術(shù)對(duì)比
車(chē)板式AGV可以直接行駛到載車(chē)板下面,利用自動(dòng)導(dǎo)引車(chē)的車(chē)身頂升機(jī)構(gòu)抬升停放有被搬運(yùn)車(chē)輛的載車(chē)板,一起搬運(yùn)到車(chē)庫(kù)的停車(chē)位。
梳齒式AGV的自動(dòng)導(dǎo)引車(chē)車(chē)身兩側(cè)分別有4組向外伸展的梳齒,被搬運(yùn)車(chē)輛放置在固定位置的梳齒架上,利用梳齒的空間間隙和升降運(yùn)動(dòng),就可以完成車(chē)輛的交換過(guò)程。
夾持式AGV利用自動(dòng)導(dǎo)引車(chē)的車(chē)身夾持裝置對(duì)車(chē)輪進(jìn)行夾抱或支撐,完成對(duì)被搬運(yùn)車(chē)輛的交換。
梳齒式和載車(chē)板式AGV都需要司機(jī)將被搬運(yùn)車(chē)輛精準(zhǔn)地開(kāi)到梳齒架或載車(chē)板等外部機(jī)械平臺(tái)上,因此對(duì)司機(jī)和外部機(jī)械平臺(tái)依賴(lài)較高,增加了泊車(chē)的風(fēng)險(xiǎn),影響用戶(hù)體驗(yàn)。
2.3.2 導(dǎo)航定位技術(shù)
AGV導(dǎo)航技術(shù)大體可以分為兩大類(lèi),固定路徑導(dǎo)航和非固定路徑導(dǎo)航[6]。固定路徑導(dǎo)航是一種需要在AGV行走路徑的地面上方或下方鋪設(shè)金屬線(xiàn)、磁帶、磁釘、色帶和二維碼等光學(xué)標(biāo)志,通過(guò)車(chē)載電磁傳感器或光學(xué)識(shí)別設(shè)備會(huì)對(duì)AGV實(shí)際位置與預(yù)設(shè)路徑間的偏移量進(jìn)行檢測(cè),控制系統(tǒng)通過(guò)偏移量對(duì)AGV運(yùn)動(dòng)進(jìn)行調(diào)整,使其能夠沿著預(yù)設(shè)路徑行走的導(dǎo)航方式。電磁感應(yīng)導(dǎo)航、磁釘導(dǎo)航、磁帶導(dǎo)航、色帶導(dǎo)航和二維碼導(dǎo)航就是典型的固定路徑導(dǎo)航方式[7]。非固定路徑導(dǎo)航是一種AGV在起始點(diǎn)和目的點(diǎn)之間可以自由行走的導(dǎo)航方式,需要AGV已知工作環(huán)境的地圖及其地圖中的位置信息。非固定路徑導(dǎo)航的常見(jiàn)方式有GPS導(dǎo)航、UWB導(dǎo)航、激光導(dǎo)航、自然導(dǎo)航、視覺(jué)導(dǎo)航和慣性導(dǎo)航[8-9]。導(dǎo)航定位方式對(duì)比如表2所示。
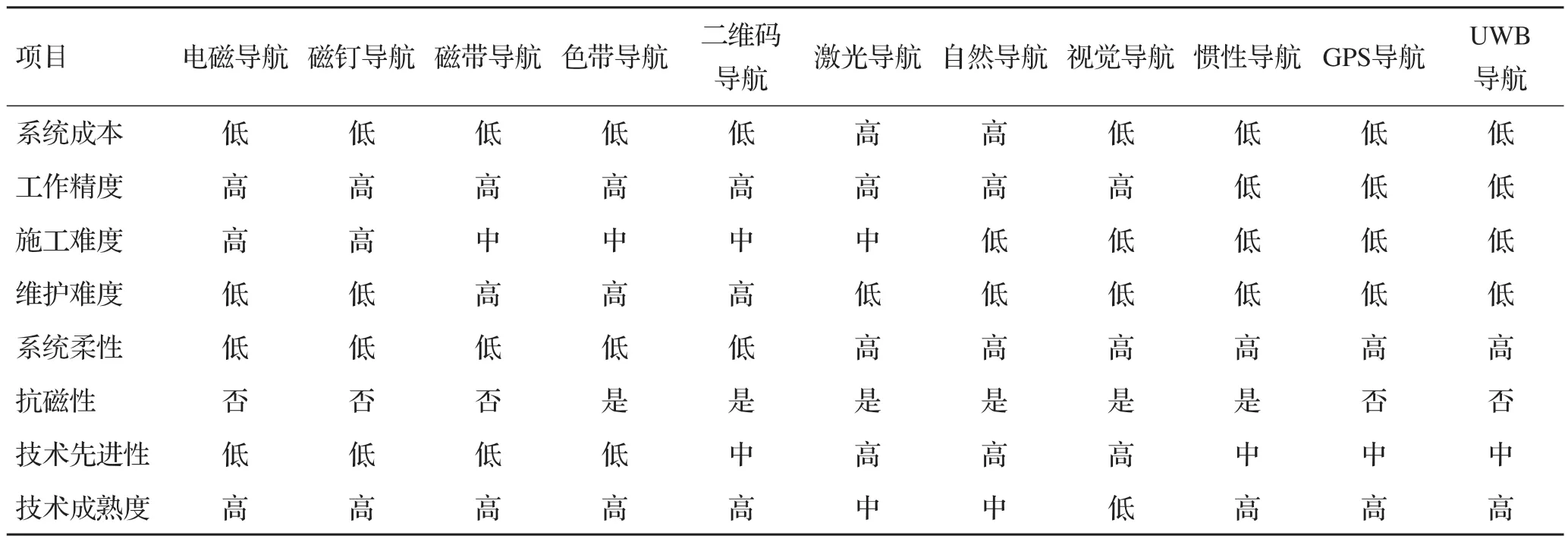
表2 導(dǎo)航定位技術(shù)對(duì)比
3 AGV智能停車(chē)庫(kù)項(xiàng)目案例及應(yīng)用優(yōu)勢(shì)
3.1 項(xiàng)目案例
中州賓館智能停車(chē)樓規(guī)劃總占地面積約為818.63 m2,建筑高度15.2 m,鋼結(jié)構(gòu)設(shè)計(jì)層數(shù)為地上6層。1~4層為SUV層,5~6層為轎車(chē)層,規(guī)劃建設(shè)車(chē)位201個(gè),有效車(chē)位195個(gè),等候車(chē)位6個(gè)。項(xiàng)目設(shè)計(jì)定位為智能機(jī)器人平面移動(dòng)停車(chē)庫(kù)。
3.2 應(yīng)用優(yōu)勢(shì)
降本+低耗:成本低于自走式車(chē)庫(kù),能耗低于機(jī)械車(chē)庫(kù)與自走式車(chē)庫(kù)。
低碳+海綿:?jiǎn)诬?chē)位體積小,建造開(kāi)挖面積小,節(jié)省鋼筋混凝土等建筑材料,減少碳排放,同時(shí)開(kāi)挖面積小,有利于海綿城市建設(shè)。
高效+便捷:AGV無(wú)人車(chē)實(shí)現(xiàn)代客泊車(chē),連續(xù)存取車(chē)速度快(約90 s取一輛車(chē)),使用高峰期可適應(yīng)潮汐效應(yīng),手機(jī)預(yù)約取車(chē)實(shí)現(xiàn)車(chē)等人。
5G+共享:實(shí)現(xiàn)停車(chē)共享、平臺(tái)共享和數(shù)據(jù)共享,通過(guò)5G互聯(lián)網(wǎng)+模式,不斷豐富城市交通生態(tài),為智慧城市、智慧交通提供數(shù)據(jù)支持。
AI+智慧:人工智能技術(shù)賦能,智能車(chē)牌識(shí)別,智能存取車(chē),智能故障識(shí)別,手機(jī)在線(xiàn)支付。
4 結(jié)語(yǔ)
停車(chē)AGV具有高度的智能性和安全性,能夠避免不確定和不準(zhǔn)確的人類(lèi)停車(chē)行為,可以高效地操作多輛車(chē)的停車(chē)過(guò)程。基于AGV的智能停車(chē)場(chǎng)在解決停車(chē)難問(wèn)題方面優(yōu)勢(shì)顯著,是未來(lái)智慧城市、智慧交通和智慧建筑發(fā)展的重要組成部分。
猜你喜歡
開(kāi)放教育研究(2021年3期)2021-05-25 02:41:06
小學(xué)科學(xué)(學(xué)生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(shù)(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44