基于多層LSTM模型的雷達目標航跡快速識別算法
2023-03-07 01:25:22李永,朱姝
無線電工程 2023年2期
李 永,朱 姝
(1.鄭州西亞斯學院 電子信息工程學院,河南 鄭州 451150;2.國防科技大學 計算機學院,湖南 長沙 410015)
0 引言
雷達是一種目標探測的電子設備,主要由發射機、接收機和接收天線等部分組成。探測過程中主要依據電磁波完成,以獲取目標的相關信息,例如距離、徑向速度和方位等[1]。目標識別是雷達領域的一個重要研究方向,但是在識別過程中,由于雷達所在位置較高,會在回波中產生顯著的地雜波,導致雷達的目標識別效率較低,且效果較差,雷達顯示屏上的點跡雜亂,影響點跡的凝聚和航跡的形成,干擾識別結果[2]。部分企業甚至為了降低應用成本,限制了雷達收發系統的束波掃描功能,導致接收機只能識別目標的一維信息[3],無法獲取目標的多維信息,目標軌跡的識別效果受到限制。因此,為了提升雷達定位精度,研究一種高效的雷達目標航跡快速識別算法具有重要意義。
針對雷達目標航跡快速識別這一重要課題,文獻[4]提出了一種基于點跡時空關系的雷達目標航跡識別算法,首先對雷達點跡數據進行屬性選擇,然后挖掘點跡數據在空間關系上的間距值特征,最后構建遞歸神經網絡進一步捕捉點跡數據的時空關系特征,實現對目標航跡的分類識別,但是該方法對于目標位置的識別存在較大誤差。文獻[5]提出了一種基于卷積神經網絡的雷達目標航跡識別算法,根據實際雷達數據特點,提出使用對數的雷達航跡預處理方法,并構建了基于卷積神經網絡的深度學習模型,實現對雷達對抗中的目標航跡的識別與檢測,但是在實際應用中發現該方法存在航跡識別時間較長的問題。文獻[6]提出了一種利用多分辨率融合卷積神經網絡實現的自動雷達波形識別算法,首先對嵌入在噪聲中的信號進行處理,獲得時頻特征圖像,然后通過插值來調整圖像的大小,并發送到所提出的網絡中進行訓練和識別,該網絡采用雙通道神經網絡結構來獲得不同分辨率的特征,并使用連接和初始模塊進行特征融合,但該算法仍存在航跡識別精度不高的問題。文獻[7]提出了一種合成孔徑雷達多目標交互式運動識別方法,包括運動目標檢測、目標類型識別、交互式運動特征提取和多目標交互式運動類型識別,該方法對合成孔徑雷達目標圖像進行小波閾值去噪,然后使用卷積神經網絡來實現目標識別,但是實際應用效果并不好,識別性能還有待改進。文獻[8]提出了一種基于光子模數轉換器和卷積神經網絡的高精度自動目標識別方案,光子模數轉換器采用能夠獲得高分辨率的范圍輪廓,卷積神經網絡能夠保證高識別精度,實驗測試結果表明,該方案具有更好的識別精度,然而該方法的運算耗時相對較長。
為此,本文引入深度學習概念,提出基于多層長短期記憶網絡(Long Short-Term Memory,LSTM)模型的雷達目標航跡快速識別算法,期望能夠進一步提高雷達目標航跡的識別效果。本文主要創新點如下:
①改進一般循環神經網絡存在的長期依賴問題,構建多層LSTM模型提取雷達目標航跡特征,提高了對于時間序列數據處理性能,雷達目標航跡特征提取效果較好;
②在多層LSTM模型中設計了融合模塊,對提取得到的特征進行了融合處理,改善單一特征分析的不足,提高多層LSTM模型的可分類性;
③對模型超參數進行了優化,動態調整超參數,避免模型過快收斂;
④在仿真實驗中,選取多個數據集和多個指標,通過反復測試驗證本文算法性能。
1 雷達目標航跡信息采集與預處理
雷達在對目標航跡實行快速識別時,電磁波會獲取目標運動的多種特征,包括目標的面積、長度和亮度均值等[9],這些信息能夠充分體現目標的軌跡情況,因此,需要采集這些信息,用于后續識別研究使用。
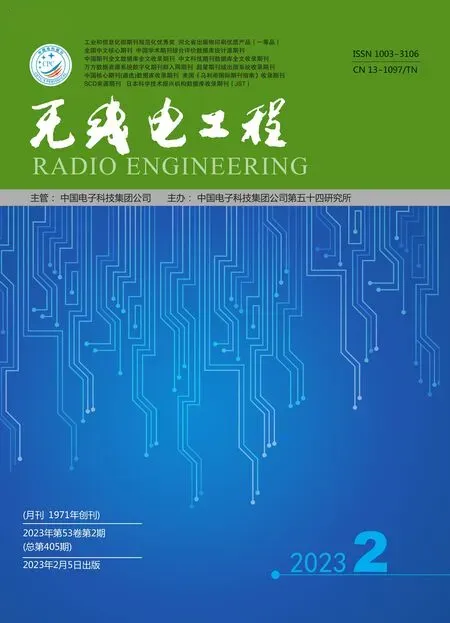
導航雷達是依據接收機獲取目標的測量信息,其接收到的雷達目標航跡如圖1所示。
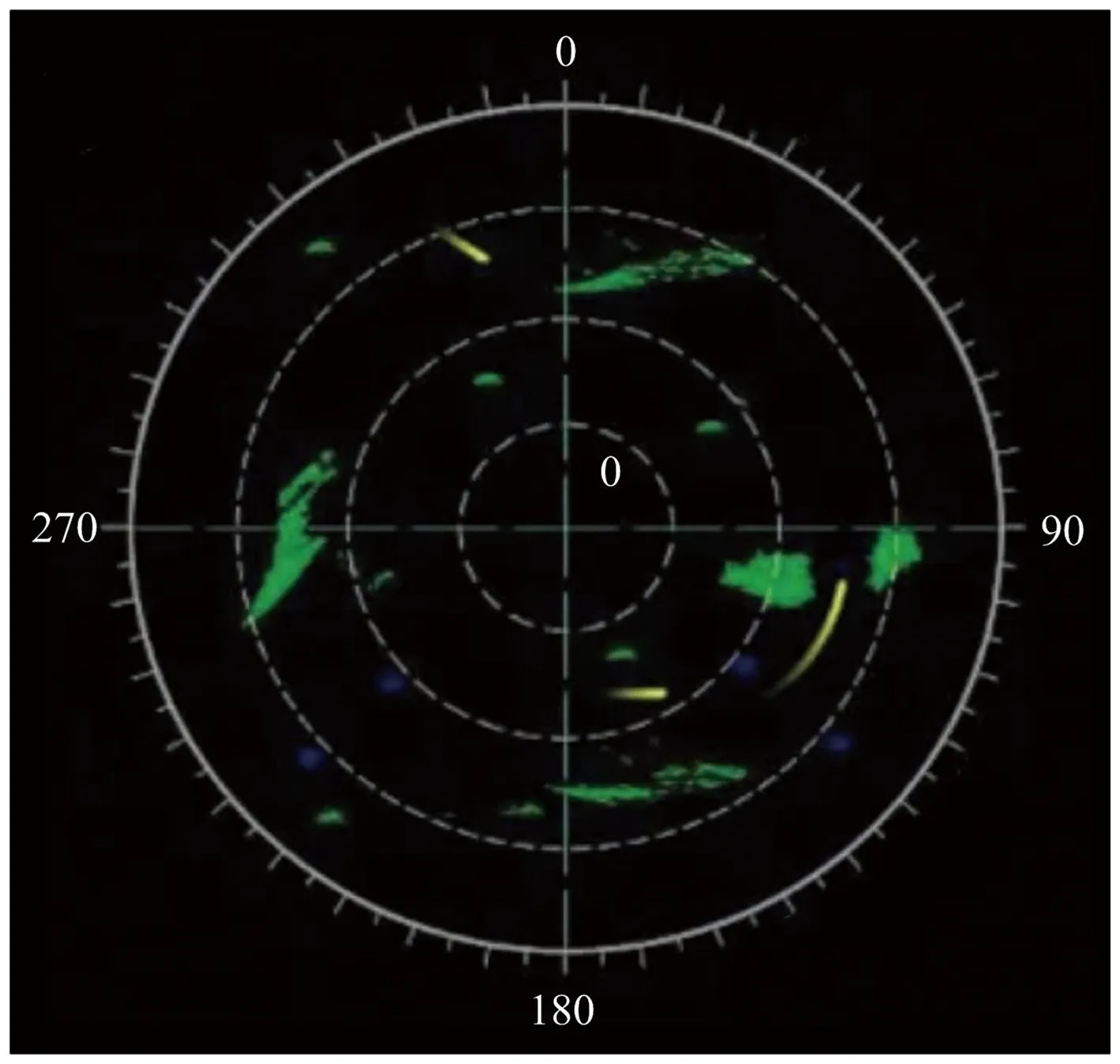
圖1 雷達目標航跡Fig.1 Radar target track map
雷達目標航跡中,接收機測量獲取的距離為:
rs=(el+ei)Trx+εiHi,
(1)
式中,i=1,2,…,N;rx為目標航跡位置矢量,且rx=[ag,bg,cg]T,T表示轉置;Hi為航跡序列;εi表示距離和測量誤差,對應第i個接收機;el和ei均為單位方向矢量,分別對應目標和發射機之間、目標和第i個接收機,二者的計算公式分別為:
(2)
(3)
式中,位置矢量用ql=[al,bl,cl]T和qi=[ai,bi,ci]T表示,前者對應發射機,后者對應第i個接收機。
N個距離和表達式結合后形成一組非線性方程,對該方程實行求解后[10-11],即可獲取雷達目標的精準三維位置。
獲取三維位置后,第i個接收機的速度量測公式為:
vs=(el+ei)v+rsζi,
(4)
式中,v=[va,vb,vc]T表示雷達目標的三維速度矢量;ζi為速度測量誤差,對應第i個接收機。
完成雷達目標的局部速度計算后,對噪聲和雜波的干擾實行抑制[12],并在此基礎上獲取第i個目標的掃頻段航跡:
(5)

為避免噪聲干擾,對采集得到的雷達目標航跡信息進行去噪處理,計算公式為:

(6)
式中,U為去噪函數;div為噪聲散度因子;?為梯度因子;‖?I‖為噪聲擴散幅值;h(‖?I‖)為降噪因子。
2 基于多層LSTM模型的航跡識別模型
以采集得到的雷達目標航跡信息為原始數據,構建多層LSTM模型用于提取雷達目標航跡特征[13-14],并對多層LSTM模型的超參數進行優化,提升模型訓練效果,高效完成雷達目標航跡快速識別。基于多層LSTM模型的識別結構如圖2所示。

圖2 基于多層LSTM模型的識別結構Fig.2 Identification structure based on multi-layer LSTM
圖2的識別結構中,將采集并預處理完成的雷達目標航跡信息輸入多層LSTM模型中,利用多層LSTM模型提取初始角特征子集、速度特征子集、方位角特征子集和初始距離特征子集等多維度特征。在多層LSTM模型中設計特征融合模塊,融合多維度特征并優化模型超參數,最后通過設計與訓練分類器,完成雷達目標航跡的快速識別。
2.1 多層LSTM的目標航跡特征提取與融合
LSTM是循環神經網絡的一種改進模型,為解決一般循環神經網絡存在的長期依賴問題而設計,在時間序列數據處理方面具有非常好的性能[15]。本文設計多層LSTM模型,通過多層LSTM網絡自主學習獲取雷達目標航跡特征數據,具體如圖3所示。
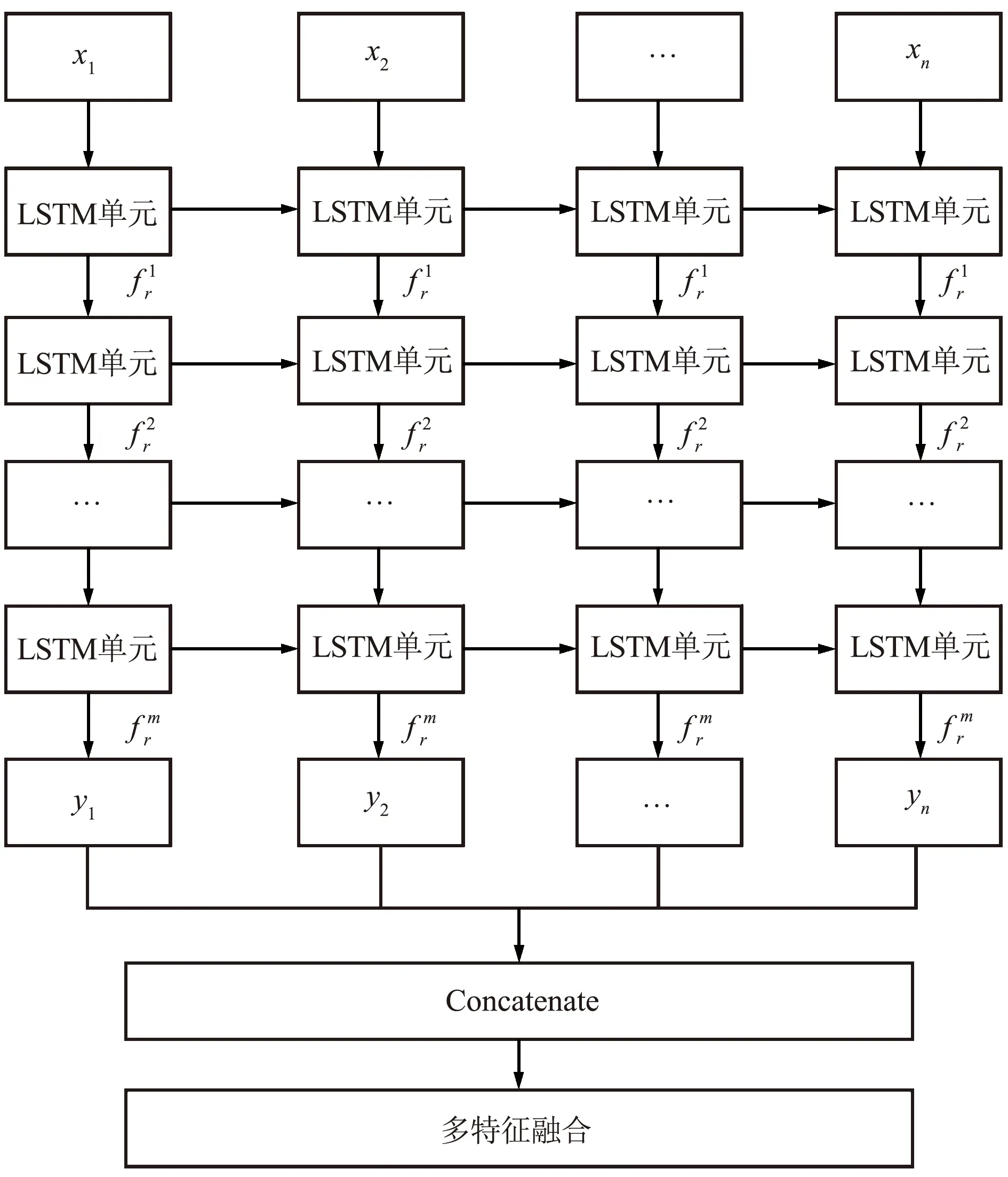
圖3 多層LSTM的目標航跡特征提取與融合Fig.3 Target track feature extraction and fusion of multi-layer LSTM

多層LSTM前向傳播公式為:
(7)

通常單一特征的直接輸入不利于模型的進一步分類識別研究,為提高多層LSTM模型的可分類性[16],以前向傳播提取得到的雷達目標航跡特征為基礎,在LSTM模型中設計多特征融合模塊對多個特征子集進行信息融合,即:
Yfusion=[y1,y2,…,yn]。
(8)
根據上述計算完成多層LSTM模型輸出,利用多層LSTM模型得到雷達目標航跡特征融合向量。
2.2 基于Adam算法優化超參數
深度學習模型運行中,超參數的取值非常關鍵,對于模型的訓練效果具有重要影響,因此本文利用Adam算法進行超參數優化,此處主要對多層LSTM模型的學習率進行優化[17-18]。
Adam算法是一種可替代隨機梯度下降的一階優化算法,利用該算法動態調整學習率過程中,首先需要計算梯度的一階矩陣和二階矩陣,即:
mt←γ1mt-1+(1-γ1)?f(θ),
(9)
dt←γ2dt-1+(1-γ2)?f(θ)2,
(10)
式中,t表示時間步;λ1和λ2表示一階矩陣和二階矩陣的衰減速率;f(θ)表示參數θ的隨機函數值。
對一階矩陣和二階矩陣進行修正:
(11)
(12)
依據修正后的矩陣調整多層LSTM模型的學習率:
(13)
式中,τ表示常數。
根據上述計算完成多層LSTM模型的超參數優化,優化后的超參數能夠根據模型訓練情況實時調節學習率,避免模型過快收斂問題。
2.3 雷達目標航跡快速識別分類器
以目標航跡特征融合結果和超參數為基礎,訓練多層LSTM模型,基于訓練完成的模型,通過損失函數計算實現雷達目標航跡的快速識別,算法描述為:
輸入:雷達初始位置信息;
輸出:雷達目標航跡識別結果。
初始化多層LSTM模型參數以及雷達目標運動數據,首先對多層LSTM模型進行訓練,訓練完成后輸入雷達初始位置信息,構建雷達目標航跡快速識別分類器,完成目標航跡識別,步驟如下:
①在多層LSTM模型中輸入雷達初始位置數據,提取航跡特征值,獲取特征向量。
②對多特征向量進行融合處理,獲取多特征融合向量集Yfusion。
③采用分類識別問題中經常使用的多分類交叉熵(Categorical Cross-Entropy,CCE)函數作為損失函數,由Softmax激活函數和損失函數Cross-Entropy共同構成,其中Softmax激活函數為:
(14)
式中,gi為多特征向量值,i為樣本序號;I為樣本數量。
通過Softmax激活函數處理后,特征向量值的取值[0,1],便于后續樣本數據的分類識別。
損失函數Cross-Entropy的計算公式為:
(15)
④通過調節超參數訓練CCE函數,同時輸入多特征融合向量集Yfusion構建并訓練分類器。
⑤通過分類器訓練完成雷達目標航跡快速識別。
綜合上述分析,完成基于多層LSTM模型的雷達目標航跡快速識別,流程如圖4所示。
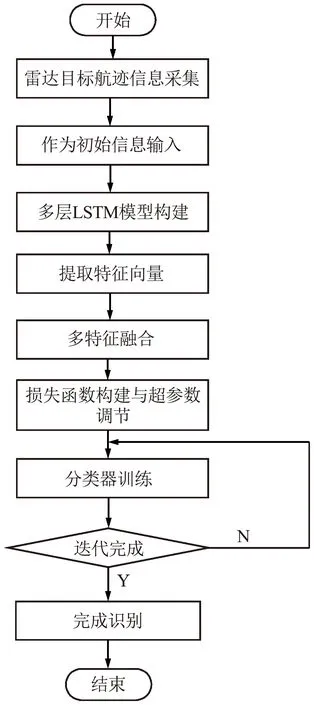
圖4 雷達目標航跡快速識別流程Fig.4 Flow chart of rapid identification of radar target track
3 實驗分析
3.1 實驗參數
為驗證本文算法的有效性,搭建仿真環境進行模擬測試。使用一臺64 GB固態硬盤、16 GB高速緩存、8核高速處理器,系統為Windows 10的計算機,在其內部設置SQL Server 2019數據庫和Matlab7.0軟件,以提升實驗運算速度,保證實驗的科學可靠性。
3.2 實驗數據集
為測試本文算法對雷達目標航跡的快速識別應用情況,選擇3種數據集作為測試數據,對本文算法進行應用測試,3種數據集分別為海上航跡數據集、空中航跡數據集和MSTAR數據集。
海上航跡數據集來自于我國某海域探測數據,用HS-A表示,其采用的雷達系統工作頻率為4.7 MHz,獲取數據率為1 幀/min,共選擇數據量為300幀,船舶全長19.5 m、型寬6.5 m、型深2.6 m、吃水1.1 m。
空中雷達數據選擇某飛機實驗室的測試數據FS-A,其中共混合2類飛機的飛行數據,分別用FS-1和FS-2表示。該數據使用的雷達系統中心頻率為5 520 MHz,帶寬為380 MHz,獲取數據率為1 幀/min,飛機的長、寬和高分別為14.2,16,4.5 m和17.5,18,4.5 m。
MSTAR數據集的實驗數據采用美國國防高等研究計劃署(DARPA)支持的MSTAR計劃所公布的實測合成孔徑雷達地面靜止目標數據,無論是在國內還是國際上,針對合成孔徑雷達圖像目標識別的研究基本上是基于該數據集而展開的。采集該數據集的傳感器為高分辨率的聚束式合成孔徑雷達,該雷達的分辨率為0.3 m×0.3 m。工作在X波段,所用的極化方式為HH極化方式。對采集到的數據進行前期處理,從中提取出像素大小為128 pixel×128 piexl,包含各類目標的切片圖像。
從以上3個實驗數據集中分別選取10組數據,以300×3的數字序列形式進行存儲,形成實驗數據集,其中8組用于多層LSTM模型訓練,2組用于實驗測試使用。
3.3 實驗指標
(1)目標特征信息提取效果
以雷達目標的長度、初始距離、方位角和初始速度作為特征信息,以驗證本文對于這些特征信息的提取效果,該結果與實際結果越接近,目標特征信息提取效果越好。
(2)目標特征融合效果
對雷達目標特征信息進行融合后,速度、方向、位置以及方向角特征分布越規范、冗余特征越少,目標特征融合效果越好。
(3)航跡識別效果
利用本文算法對雷達目標航跡進行識別,分析船舶目標和FS-1飛機目標發生中間航跡斷裂情況下的識別效果,該結果與實際結果越接近,目標識別效果越好。
(4)位置識別誤差
位置識別誤差是指跟蹤雷達目標過程中目標實際位置與不同算法的目標識別位置之間的差值,該指標的計算公式為:
error=K1-K2,
(16)
式中,K1表示目標實際位置;K2表示不同算法的目標位置識別結果。
(5)航跡識別時間
雷達目標航跡識別時間是指識別雷達目標航跡的所有時間消耗,識別時間越短,效率更高,該指標的計算公式為:
(17)
式中,ti表示第i個雷達目標航跡識別的時間消耗。
3.4 實驗結果
(1)目標特征信息提取效果
為測試本文算法對于雷達目標空間運動多種特征的獲取效果,以上述3個雷達目標的長度、初始距離、方位角和初始速度為主要測試特征信息,獲取本文方法對2個目標特征信息的獲取結果,如表1所示。

表1 3個目標特征信息的獲取結果Tab.1 Results of the acquisition of the 3 target feature information
分析表1的測試結果可知,本文算法能夠獲取不同雷達目標的多種特征,并且獲取的特征結果與實際結果一致。因此,本文方法能夠可靠獲取雷達目標的多特征信息,并且可區分不同雷達目標的特征信息結果,為雷達目標航跡快速識別提供可靠依據。
(2)目標特征融合效果
為測試本文算法對雷達目標多特征的融合效果,獲取2種雷達目標在不同的掃描周期內,獲取目標的特征信息融合結果,為了更直觀體現本文算法的融合效果,以FS-1數據為目標數據,隨機抽取獲取該目標部分特征數據,采用本文算法對其實行融合,獲取特征融合結果,如圖5所示。
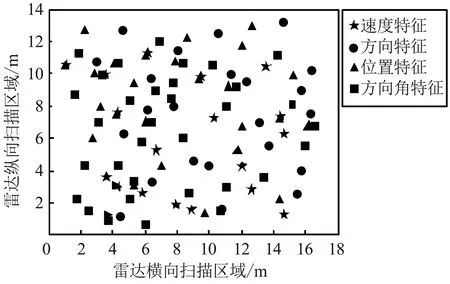
(a)FS-A數據集混合特征分布結果

(b)FS-1目標數據特征融合結果圖5 雷達目標的特征融合測試結果Fig.5 Feature fusion test results of the radar targets
分析圖5的測試結果可知,采用本文算法對獲取FS-1數據的2個雷達采集的目標數據的特征實行融合后,融合的結果中能夠精準結合2個雷達的掃描結果,并且對于重復的冗余特征可實行有效刪除,實現不同特征的有效融合。因此,本文多層LSTM模型的多特征融合效果良好,可有效獲取雷達目標的特征融合結果。
(3)航跡識別效果
為衡量本文算法的目標航跡識別性,獲取船舶目標和FS-1飛機目標發生中間航跡斷裂情況下,本文算法對于航跡的識別結果,如圖6所示。
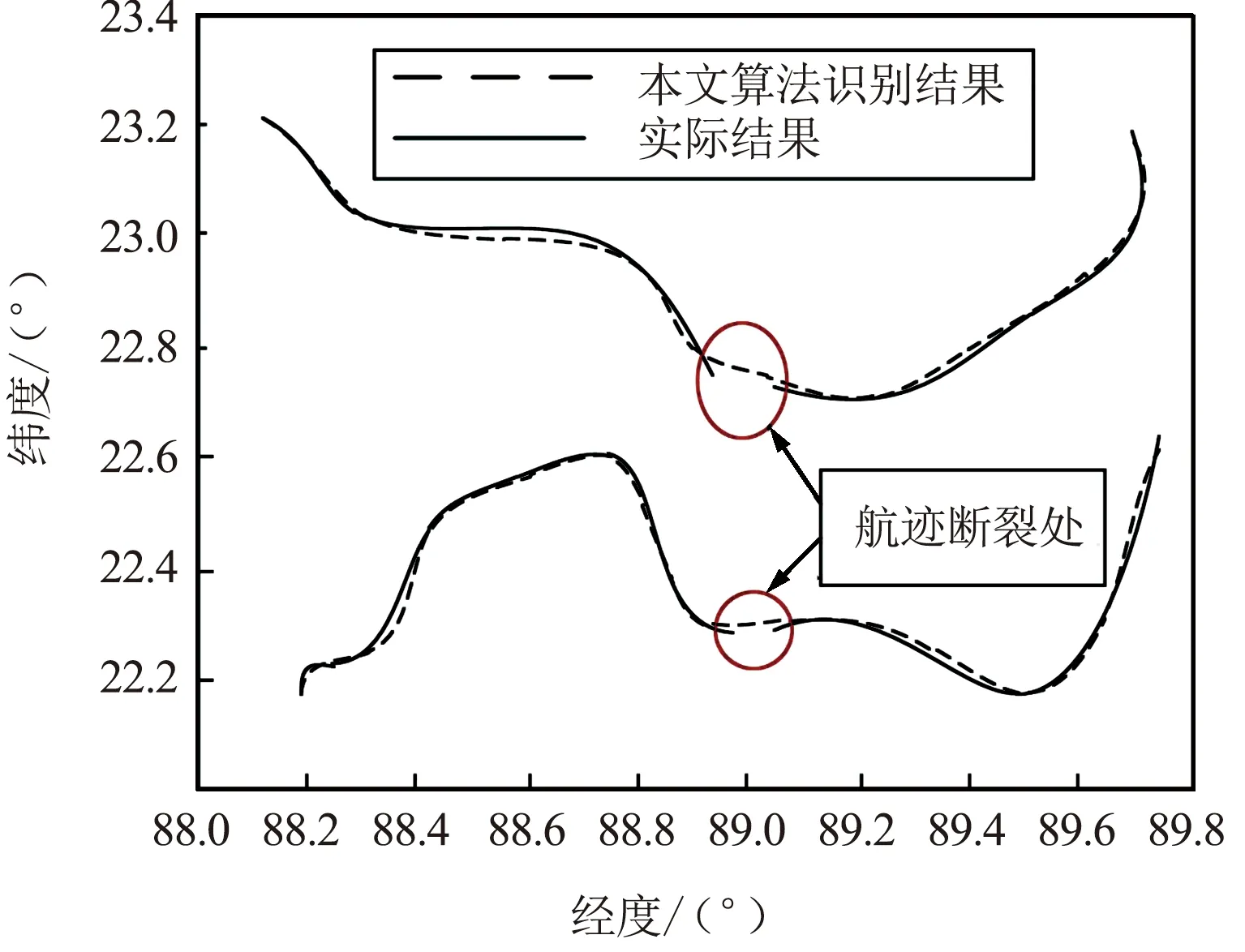
圖6 雷達目標航跡的識別結果Fig.6 Identification result of the radar target track
分析圖6的測試結果可知,2個雷達目標在不同的經、緯度下發生中間航跡斷裂后,本文算法依舊能夠完成航跡的可靠識別,信息的丟失沒有對航跡識別結果造成影響,是因為本文方法在航跡識別時,優化了多層LSTM模型的超參數,進而保證了本文算法良好的目標航跡識別性能。
(4)目標位置誤差
為直接驗證本文算法對雷達目標航跡的快速識別效果,本文算法應用后得出的雷達目標航跡結果如圖7所示。
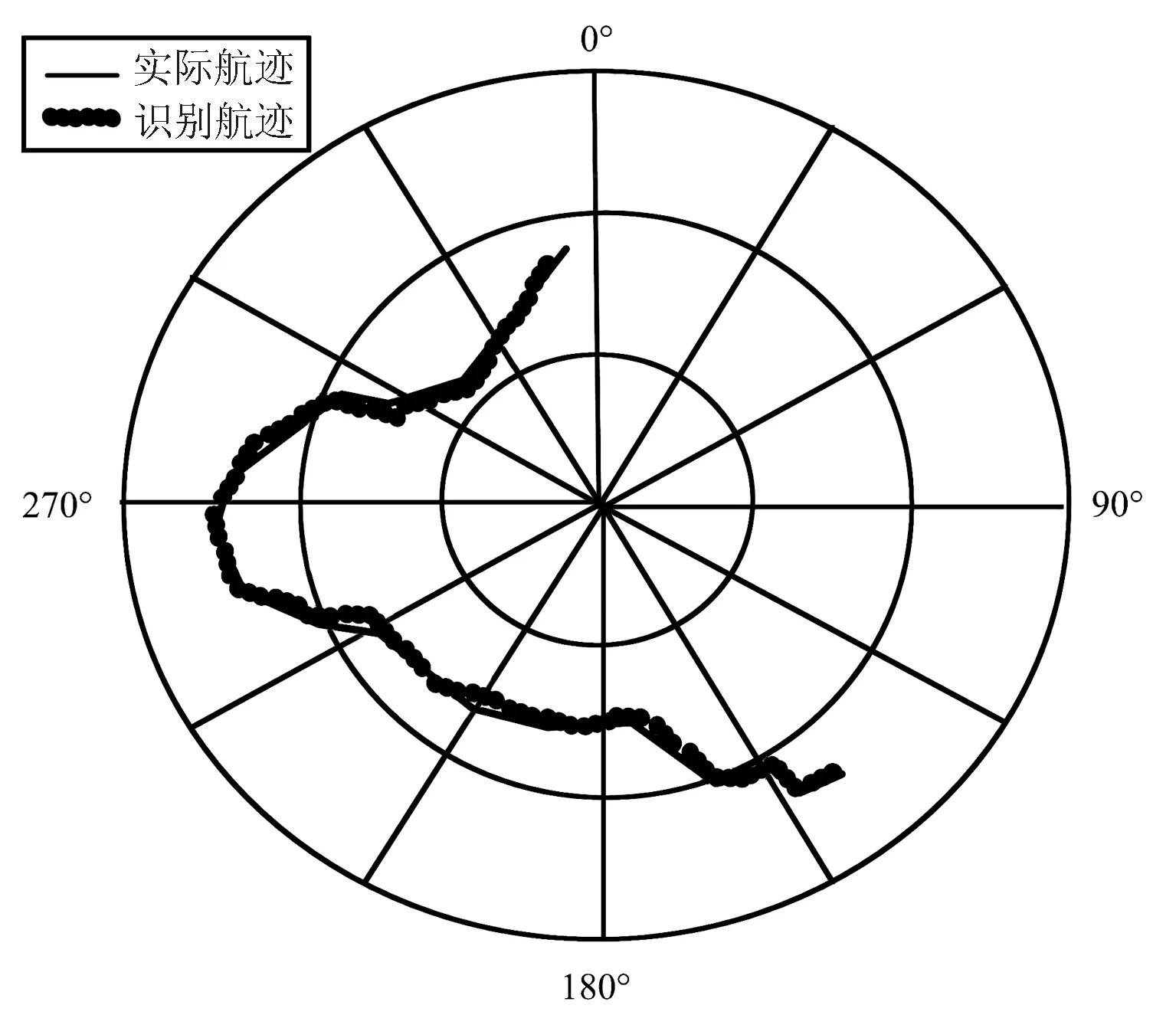
圖7 雷達目標航跡識別測試結果Fig.7 Radar target track identification test results
由圖7的測試結果可知,本文算法能夠依據雷達目標的點跡掃描結果,生成目標的航跡圖,并且該結果與目標的實際航跡結果一致,因此,本文算法能夠精準完成雷達目標航跡快速識別。這是因為本文算法在進行航跡識別時,采用多層LSTM模型進行特征提取,充分發揮了多層LSTM模型對于數據的高效處理功能,因此能夠獲取精準的航跡識別結果。
為進一步分析本文算法對雷達目標航跡的識別性能,采用文獻[4-8]的算法進行雷達目標位置識別,結果如表2所示。
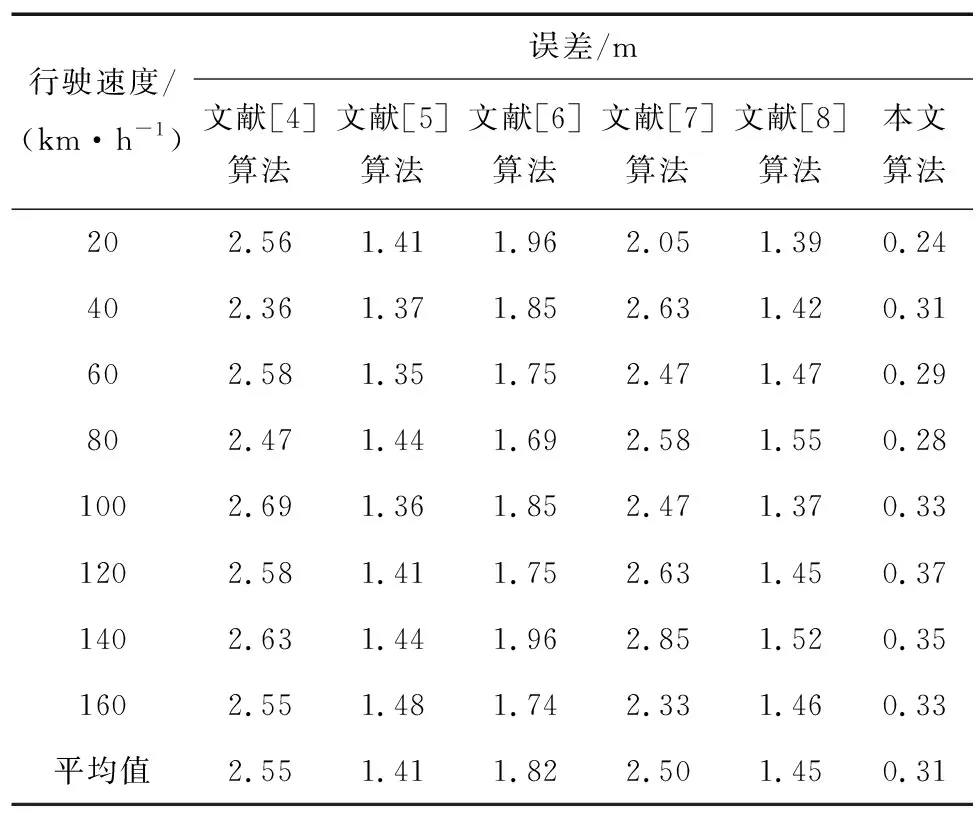
表2 位置識別誤差Tab.2 Position Identification Error
由表2的測試結果可知,本文算法的目標位置平均識別誤差僅為0.31 m,文獻[4]算法的目標位置平均識別誤差最大,達到2.55 m,其次是文獻[7]算法,目標位置平均識別誤差為2.50 m,文獻[5]算法的平均識別誤差相對較低,為1.41 m,但仍遠遠高于本文算法,可見本文算法的目標位置平均識別誤差更低、精度更高。由此可知,本文算法的航跡識別效果良好,可在設定標準內完成雷達目標航跡快速識別。本文對雷達目標航跡的多特征進行了融合處理,避免了冗余特征干擾,提高了識別準確度。
(5)航跡識別時間
比較文獻[4-8]算法以及本文算法的雷達目標航跡識別時間,結果如表3所示。
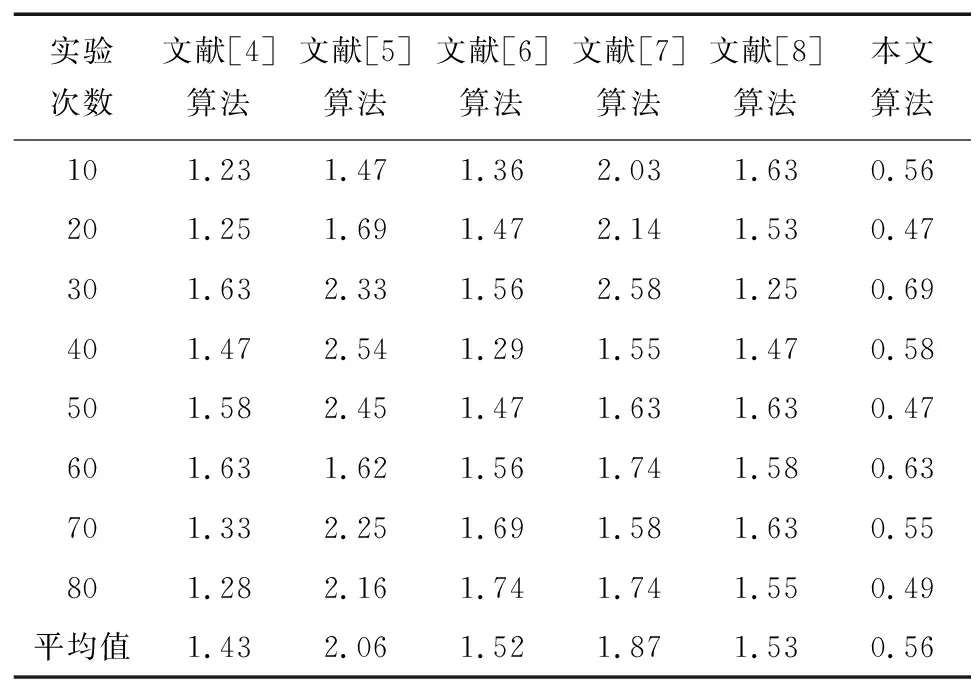
表3 雷達目標航跡識別時間Tab.3 Radar target track identification time 單位:s
分析表3中的數據可知,文獻[4]算法的雷達目標航跡識別時間平均值為1.43 s,文獻[5]算法的平均值為2.06 s,文獻[6]算法的平均值為1.52 s,文獻[7]算法的平均值為1.87 s,文獻[8]算法的平均值為1.53 s,本文算法的雷達目標航跡識別時間平均值為0.56 s,與對比實驗算法相比,本文算法的雷達目標航跡識別時間更短、效率更高,證明本文方法可以快速識別雷達目標航跡,這得益于本文設計的多層LSTM模型對于數據處理的高效性。
4 結束語
雷達目標航跡掃描對于實際航行具有重要作用,針對傳統方法存在的不足,提出了基于多層LSTM模型的雷達目標航跡快速識別算法,并將該算法用于雷達航跡數據集中進行相關測試。結果顯示,提出得方法能夠良好地獲取雷達目標的特征信息,并且能夠有效融合雷達目標的特征信息,在發生航跡斷裂后,依舊能夠實現航跡的準確識別,識別位置誤差更低、時間更短。
但是雷達目標航行場景多樣,本文對于場景帶來的影響考慮并不充分,在下一步的研究中,將考慮更多樣化的場景因素,同時在實驗中使用更多的數據集進行測試,更加全面地分析雷達目標航跡識別相關問題,為雷達目標的場景化應用提供理論依據。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年12期)2021-11-30 02:58:01
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54