基于改進(jìn)蝙蝠算法和圓柱坐標(biāo)系的農(nóng)業(yè)無人機(jī)航跡規(guī)劃
2023-03-07 07:31:52呂石磊范仁杰陳嘉鴻謝家興
農(nóng)業(yè)機(jī)械學(xué)報 2023年1期
關(guān)鍵詞:規(guī)劃
呂石磊 范仁杰 李 震 陳嘉鴻 謝家興
(1.華南農(nóng)業(yè)大學(xué)電子工程學(xué)院(人工智能學(xué)院), 廣州 510642; 2.嶺南現(xiàn)代農(nóng)業(yè)科學(xué)與技術(shù)廣東省實驗室, 廣州 510642;3.人工智能與數(shù)字經(jīng)濟(jì)廣東省實驗室(廣州), 廣州 510330; 4.國家柑橘產(chǎn)業(yè)技術(shù)體系機(jī)械化研究室, 廣州 510642)
0 引言
在農(nóng)業(yè)生產(chǎn)的主要環(huán)節(jié)中,作物病蟲害的監(jiān)測和施藥往往極度依賴人工,而人力資源不足的矛盾日益突出。隨著農(nóng)業(yè)航空植保技術(shù)的不斷發(fā)展,農(nóng)業(yè)無人機(jī)已經(jīng)廣泛地應(yīng)用到現(xiàn)代化農(nóng)業(yè)生產(chǎn)與管理環(huán)節(jié),通過無人機(jī)對植株進(jìn)行精確監(jiān)測和精準(zhǔn)施肥、施藥成為必然選擇[1-3],無人機(jī)航跡規(guī)劃是當(dāng)前的研究熱點(diǎn),存在人工可操作性差、作業(yè)成本高等問題。農(nóng)業(yè)無人機(jī)的飛行航跡規(guī)劃是否合理將直接影響到飛行任務(wù)的成敗,在山地果園、農(nóng)田等復(fù)雜地形環(huán)境下,無人機(jī)常常面臨著不同類型的威脅區(qū)和障礙物,如風(fēng)切變區(qū)、基站塔、護(hù)林樹、設(shè)施農(nóng)用建筑等[4]。因此,有必要對農(nóng)業(yè)無人機(jī)進(jìn)行合理、安全的飛行航跡規(guī)劃,以提升避障性能,并降低飛行成本。
國內(nèi)外學(xué)者提出了多種無人機(jī)航跡自主規(guī)劃算法,可分為傳統(tǒng)經(jīng)典算法和群體智能算法。傳統(tǒng)經(jīng)典算法包括Dijkstra算法[5]、A*算法[6]、人工勢場法[7]、模擬退火算法[8]等。董箭等[9]提出了基于改進(jìn)A*算法的無人機(jī)航跡規(guī)劃方法,在一定程度上提升了航跡規(guī)劃效率及最短航跡判定準(zhǔn)確性。陳俠等[10]改進(jìn)了人工勢場法,并將其應(yīng)用于無人機(jī)航跡規(guī)劃,解決了搜索范圍隨機(jī)性過高、收斂速度慢等問題。群體智能算法包括遺傳算法(Genetic algorithm, GA)[11]、粒子群算法(Particle swarm optimization, PSO)[12]、蝙蝠算法(Bat algorithm, BA)[13]、人工蜂群算法(Artificial bee colony, ABC)[14]、蟻群算法(Ant colony optimization, ACO)[15]等。與傳統(tǒng)經(jīng)典算法相比,群體智能算法利用群體優(yōu)勢,在沒有集中控制,不提供全局模型的前提下,適合于求解具有非線性、多峰、多谷、非凸等特點(diǎn)的大規(guī)模復(fù)雜規(guī)劃問題。方勝良等[16]通過融合約束條件和搜索算法來減小搜索空間,并基于PSO算法得到全局最優(yōu)的無人機(jī)航跡規(guī)劃方案。王慶海等[17]提出了基于航跡長度和航跡角度等約束條件的無人機(jī)航跡規(guī)劃模型,并采用改進(jìn)ABC算法得到航跡規(guī)劃方案。賀井然等[18]提出了融合k均值聚類方法的改進(jìn)ABC算法,實驗結(jié)果表明,與傳統(tǒng)ABC算法相比,改進(jìn)ABC算法在求解無人機(jī)航跡規(guī)劃問題時具有更好的收斂速度和搜索精度。王宇等[19]提出了基于改進(jìn)ACO算法的無人機(jī)航跡規(guī)劃方法,以幫助植保無人機(jī)規(guī)劃出更加高效的飛行路徑。
與其他群體智能算法相比,BA算法具有求解速度快、參數(shù)調(diào)整量小等優(yōu)點(diǎn)。然而,由于全局搜索能力低,BA算法容易陷入局部最優(yōu),尋優(yōu)結(jié)果不穩(wěn)定。為了改進(jìn)BA算法性能,張宇楠等[20]提出了基于自適應(yīng)步長機(jī)制的改進(jìn)BA算法,使蝙蝠群體在迭代尋優(yōu)過程不易陷入局部最優(yōu)。肖輝輝等[21]將差分策略與BA算法結(jié)合起來,進(jìn)一步提升算法性能。楊凱中等[22]將鴿群優(yōu)化算法的羅盤算子用于幫助蝙蝠群體快速找到高質(zhì)量的個體,有效提升了算法的搜索能力。陳東寧等[23]針對多形態(tài)作用力BA算法全局搜索能力強(qiáng)、收斂速度快的優(yōu)勢,以及多階段自適應(yīng)信息素機(jī)制ACO算法局部精細(xì)化能力強(qiáng)的特點(diǎn),將改進(jìn)BA算法和改進(jìn)ACO算法進(jìn)行串行混合,提出了多階段自適應(yīng)混合智能算法。GAN等[24]提出了基于迭代局部搜索和隨機(jī)慣性權(quán)值的改進(jìn)ILSSIWBA算法(Bat algorithm based on iterative local search and stochastic inertia weight),該算法對局部最優(yōu)進(jìn)行干擾并進(jìn)行局部重搜索,具有較強(qiáng)的跳出局部最優(yōu)的能力。WANG等[25]提出了融合差分進(jìn)化算法的改進(jìn)BA算法,并將其應(yīng)用于求解軍事無人機(jī)的航跡規(guī)劃問題。
本文針對傳統(tǒng)BA算法在求解高維度問題時容易陷入局部最優(yōu)且求解精度低的問題,提出融合脈沖變頻策略、自適應(yīng)局部搜索策略和變異機(jī)制的改進(jìn)IBA-FCS算法(Improved bat algorithm using frequency conversion strategy);針對農(nóng)業(yè)無人機(jī)在丘陵山地果園復(fù)雜地形環(huán)境下的安全航跡規(guī)劃問題,提出融合障礙物威脅區(qū)、無人機(jī)飛行高度和轉(zhuǎn)角等約束的航跡規(guī)劃模型;應(yīng)用IBA-FCS算法求解航跡規(guī)劃模型,并將模型的求解空間由笛卡爾坐標(biāo)系變換到圓柱坐標(biāo)系,減小模型的有效可行解空間,以期得到安全可靠且低成本的農(nóng)用無人機(jī)航跡規(guī)劃方案。
1 傳統(tǒng)BA算法
BA算法利用蝙蝠在覓食時所發(fā)出脈沖的頻率f、響度A、脈沖發(fā)射率R的變化構(gòu)建模型。在算法迭代過程中,蝙蝠個體i的參數(shù)更新可描述為:

(1)

(2)
fi=fmin+(fmax-fmin)β(β∈[0,1])
(3)
式中fi——蝙蝠個體i的頻率
fmax、fmin——f的最大值、最小值
t——當(dāng)前迭代次數(shù)
β——隨機(jī)向量,服從均勻分布
x*——當(dāng)前的全局最優(yōu)解
(2)在當(dāng)前全局最優(yōu)解附近進(jìn)行局部搜索
(4)
式中ε——隨機(jī)數(shù)
At——當(dāng)前所有蝙蝠的平均響度
(3)更新脈沖響度A和脈沖發(fā)射率R
(5)
(6)
式中α、γ——常量,一般取0.9
Rmax——最大發(fā)射頻率
隨著迭代次數(shù)的增加,可得到
(7)
2 IBA-FCS算法
2.1 脈沖變頻策略
BA算法的搜索過程包括全局搜索和局部搜索。在全局搜索操作中,蝙蝠i的位置更新過程主要受脈沖頻率fi、當(dāng)前全局最優(yōu)解x*和先前速度等參數(shù)變化的影響。首先,針對傳統(tǒng)BA算法沒有考慮蝙蝠i的個體最優(yōu)解對其位置更新過程的影響,在蝙蝠i的個體位置更新公式中引入個體最優(yōu)解對其位置更新過程的影響;其次,傳統(tǒng)BA算法的脈沖頻率fi的參數(shù)變化僅與上邊界fmax和下邊界fmin相關(guān),頻率fi的參數(shù)變化不能隨著算法的迭代進(jìn)程自適應(yīng)變化。綜合上述分析,提出在傳統(tǒng)BA算法全局搜索操作中加入脈沖變頻策略[26]。IBA-FCS算法使用2個自適應(yīng)變頻的脈沖頻率分別表征個體最優(yōu)解和全局最優(yōu)解對蝙蝠i位置更新過程的影響,即f1和f2;同時,f1和f2隨當(dāng)前目標(biāo)函數(shù)的適應(yīng)值和算法的迭代進(jìn)程進(jìn)行參數(shù)自適應(yīng)變化。IBA-FCS算法的全局搜索操作為
(8)
f1=αb(1-e-|Favg-Fmin|)+γb(1-t/tmax)+fmin
(9)
(10)
(11)
式中h*——蝙蝠i的當(dāng)前個體最優(yōu)解
r1、r2——(0.5,1.5)范圍內(nèi)的隨機(jī)數(shù)
Favg——蝙蝠群體的當(dāng)前函數(shù)適應(yīng)度均值
Fmin——當(dāng)前最優(yōu)蝙蝠個體的函數(shù)適應(yīng)度
tmax——算法最大迭代次數(shù)
μ——位置參數(shù)的遞減權(quán)重系數(shù),用于約束蝙蝠i全局搜索操作的更新步長,取為(0,1]
ωmax、ωmin——ω的最大值、最小值
ωb——速度參數(shù)的遞減權(quán)重系數(shù)
ωb較大保證了算法前期具有較強(qiáng)的全局搜索能力,ωb較小使算法后期具有較強(qiáng)的局部搜索能力。參數(shù)f1主要受目標(biāo)函數(shù)適應(yīng)度和算法迭代進(jìn)程的影響,二者權(quán)重系數(shù)分別為正常數(shù)αb和γb;若記參數(shù)f1與f2之和為常數(shù)SF,則f2=SF-f1。隨著算法迭代進(jìn)程變化,參數(shù)f1的取值將從SF遞減為fmin,參數(shù)f2的取值將從0遞增為SF-fmin。在算法搜索過程的前期,參數(shù)f1的值較大能夠增加蝙蝠群體的多樣性,從而增強(qiáng)算法的全局搜索能力;在算法搜索過程的后期,f2的值較大能夠保證算法具有較好的收斂性,從而增強(qiáng)算法的尋優(yōu)精度。
2.2 自適應(yīng)局部搜索策略

(12)
其中
(13)
式中δ——隨機(jī)向量
Vr——目標(biāo)函數(shù)可行解域的邊界距離與蝙蝠群體數(shù)量的比值向量,目的是使局部搜索步長能夠同求解問題的規(guī)模自適應(yīng)變化
g(k)——隨算法的迭代過程變化的指數(shù)遞減函數(shù),用來約束蝙蝠個體i局部搜索操作的更新步長

2.3 變異機(jī)制

(14)
(15)

2.4 IBA-FCS算法流程
(1)設(shè)置蝙蝠種群規(guī)模、最大迭代次數(shù)、初始響度A0、初始速度V0、頻率f、 常數(shù)α和γ。
(2)根據(jù)式(9)更新脈沖頻率f,根據(jù)式(11)更新慣性權(quán)重系數(shù)ωb,根據(jù)式(14)、(15)更新響度A和發(fā)射率R。
(3)根據(jù)式(8)更新蝙蝠個體速度,選擇式(10)更新蝙蝠個體位置;若蝙蝠個體滿足局部搜索條件,則根據(jù)式(12)、(13)進(jìn)行局部搜索。
(4)判斷蝙蝠個體是否進(jìn)行變異操作,如若滿足條件,則進(jìn)行變異,并計算適應(yīng)度。
(5)根據(jù)適應(yīng)度更新蝙蝠個體位置參數(shù)和全局最優(yōu)解。
(6)判斷是否達(dá)到終止條件,如不滿足終止條件,則轉(zhuǎn)至步驟(2)。
2.5 IBA-FCS算法性能測試
使用9個測試函數(shù)來分析算法性能,如表1所示。其中,f1~f4為單峰函數(shù),f5~f9為多峰函數(shù)。測試環(huán)境:Microsoft Windows 10 Pro 64-bit,Intel Core i7-10700F @ 2.90 GHz,16.0 GB RAM,Matlab R2019a。對照算法包括PSO算法、GA算法、傳統(tǒng)BA算法和改進(jìn)BA算法(ILSSIWBA)。
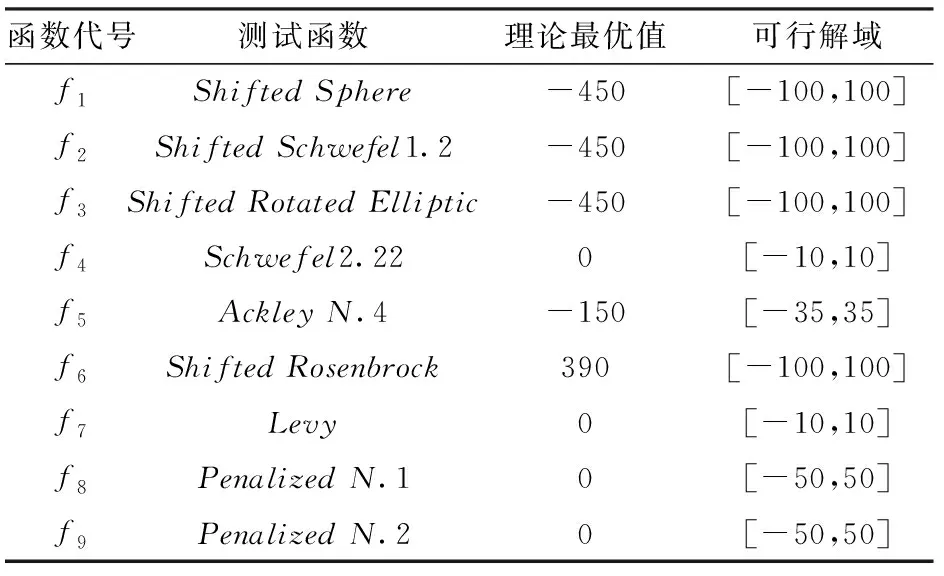
表1 測試函數(shù)Tab.1 Test functions
IBA-FCS算法參數(shù)設(shè)置為:速度參數(shù)權(quán)重系數(shù)隨算法迭代進(jìn)程變化自適應(yīng)遞減,ωmax=0.9,ωmin=0.1;脈沖頻率權(quán)重系數(shù)αb=1,γb=1.5;雙脈沖頻率之和SF=3,fmin=0.5,fmax=2.5;位置參數(shù)權(quán)重系數(shù)隨算法迭代進(jìn)程變化線性遞減,μmax=0.7,μmin=0.3;算法其余控制參數(shù)為Amin=0.3,Rmax=0.7。各對照算法的參數(shù)設(shè)置同原文獻(xiàn)。PSO算法:學(xué)習(xí)因子c1=c2=2,慣性權(quán)重w=0.729。傳統(tǒng)BA算法:脈沖頻率范圍為[-2,0],響度A初始值范圍為(1,2),脈沖發(fā)射率R初始值為(0,0.5),最大發(fā)射率Rmax=0.9。GA算法:染色體交叉率取值范圍為(0.4,1),染色體變異率為(0,0.5)。ILSSIWBA算法:fmin=-2,fmax=2,隨機(jī)慣性權(quán)重的最大因子μmax=0.9,隨機(jī)慣性權(quán)重的最小因子μmin=0.4,隨機(jī)慣性權(quán)重與其均值的偏差σ=0.2,脈率上限r(nóng)∞=0.7,響度下限A∞=0.6。各算法種群規(guī)模均為500,最大迭代次數(shù)均為300次,獨(dú)立運(yùn)行50次。各算法求解50維度(D)測試函數(shù)的結(jié)果,包括函數(shù)最優(yōu)值、最壞值、均值和標(biāo)準(zhǔn)方差,如表2所示。
由表2可知,在尋優(yōu)精度方面,GA算法和傳統(tǒng)BA算法對50D部分單峰測試函數(shù)(f1、f2、f3)的平均求解精度稍優(yōu)于PSO算法;在部分多峰測試函數(shù)(f5、f7、f8、f9)中,傳統(tǒng)BA算法和ILSSIWBA算法的平均求解精度優(yōu)于PSO算法。與對照算法相比,IBA-FCS算法在單峰函數(shù)和多峰函數(shù)中均具有更好的求解精度,并且基于不同測試函數(shù)測試結(jié)果的標(biāo)準(zhǔn)差可知,IBA-FCS算法具有較好的魯棒性。在算法運(yùn)行時間方面,由于IBA-FCS算法中加入了多種評價判斷策略,其運(yùn)行時間會稍差于傳統(tǒng)BA算法和PSO算法,但仍處于同一數(shù)量級。
多峰函數(shù)一般用于檢驗群體智能算法跳出局部最優(yōu)值的全局性尋優(yōu)性能。在本文的測試函數(shù)中,函數(shù)f5是具有大量局部最優(yōu)值的典型多峰測試函數(shù),其二維函數(shù)圖像類似橫斷山脈,與山地果園飛行環(huán)境形似,尋優(yōu)難度相對較大。由表2可知,IBA-FCS算法較對照算法在求解該多峰函數(shù)的過程中仍具有明顯優(yōu)勢。但是,受農(nóng)業(yè)無人機(jī)作業(yè)環(huán)境制約,其航跡規(guī)劃方案不僅要求尋優(yōu)到最短飛行路徑,還需要綜合考慮障礙物、飛行參數(shù)等多因素約束。因此,農(nóng)業(yè)無人機(jī)安全航跡規(guī)劃模型是一個多約束、非線性的復(fù)雜優(yōu)化問題,與典型多峰測試函數(shù)相比,其對群體智能算法的尋優(yōu)能力有更高的要求。

表2 50D測試函數(shù)的計算結(jié)果Tab.2 Calculation results of 50D test functions
3 農(nóng)業(yè)無人機(jī)航跡規(guī)劃模型設(shè)計
3.1 無人機(jī)飛行環(huán)境設(shè)計
采用復(fù)合函數(shù)來模擬山地果園的無人機(jī)飛行環(huán)境地形,形成三維數(shù)字高程地圖模型
(16)
式中n′——山坡數(shù)量
hi——山坡高度相關(guān)控制參數(shù)
(xi,yi)——第i個山坡的中心坐標(biāo)
xsi、ysi——對應(yīng)山坡沿x軸和y軸方向的衰減量,用于約束坡度數(shù)據(jù)
at~gt——系數(shù)
z1(x,y)通過不同系數(shù)(at,bt,ct,dt,et,ft,gt)的設(shè)定組合模擬數(shù)字地圖多樣化的基準(zhǔn)地形特征,但僅通過z1(x,y)難以描述復(fù)雜多樣的丘陵山地地形。z2(x,y)用于表征數(shù)字地圖的丘陵山坡數(shù)據(jù),以增大地形的起伏程度。最終取z1和z2的最大值作為對應(yīng)點(diǎn)的高程,形成山地果園無人機(jī)仿真飛行環(huán)境地形。
3.2 無人機(jī)飛行約束建模
3.2.1路徑最短約束
無人機(jī)航跡規(guī)劃的首要目標(biāo)是尋找起飛點(diǎn)和目標(biāo)點(diǎn)之間最短路程的飛行路徑方案。一般地,記無人機(jī)的飛行路徑點(diǎn)為Wij=(xij,yij,zij),即在第i條飛行路徑中第j個路徑點(diǎn)的無人機(jī)三維空間位置,則整條飛行路徑Xi可表示為包含n個路徑點(diǎn)的三維數(shù)組。將2個路徑點(diǎn)之間的歐氏距離記作路徑段lWijWi,j+1,則與無人機(jī)飛行路徑相關(guān)的成本函數(shù)F1為
(17)
3.2.2威脅最小約束
無人機(jī)通過躲避障礙物來確保安全作業(yè)航跡。設(shè)定障礙物威脅區(qū)為圓柱體形式,其投影如圖1所示,記圓柱體中心坐標(biāo)為Ck,半徑為Rk,外圍為碰撞威脅區(qū)D,則無人機(jī)的避障威脅成本與其路徑段WijWi,j+1和障礙物中心Ck的距離dk成反比。將飛行環(huán)境下的障礙物威脅區(qū)集合記作K,障礙物威脅成本懲罰系數(shù)記作γc,則與無人機(jī)避障威脅相關(guān)的成本函數(shù)F2為

圖1 障礙物威脅區(qū)示意圖Fig.1 Diagram of obstacle threat area
(18)
其中

(19)
3.2.3飛行高度約束
無人機(jī)的飛行高度通常受到最小高度hmin和最大高度hmax的約束限制,如圖2所示,其中Tij為地形高度,zij為無人機(jī)相對于海平面的高度。將無人機(jī)在路徑點(diǎn)Wij處距離基準(zhǔn)地形地面的高度記作hij,即zij和Tij的差,則與無人機(jī)當(dāng)前路徑點(diǎn)Wij相關(guān)的成本函數(shù)Hij為
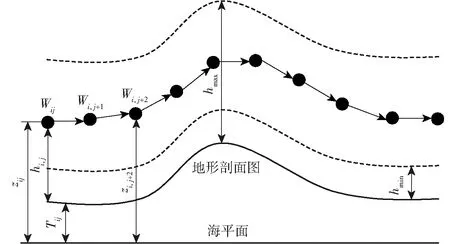
圖2 飛行高度約束示意圖Fig.2 Diagram of flight height constraint
(20)
同時,將無人機(jī)飛行高度超出約束限制條件的懲罰系數(shù)記作γh,則與無人機(jī)飛行路徑相關(guān)的成本函數(shù)F3為
(21)
3.2.4飛行轉(zhuǎn)角約束
無人機(jī)的飛行轉(zhuǎn)角控制參數(shù)主要包括水平轉(zhuǎn)彎角和豎直俯仰角,這2個參數(shù)變量必須符合無人機(jī)的實際轉(zhuǎn)角約束限制,否則航跡規(guī)劃模型無法生成具有可行性的飛行路徑。如圖3所示,lWijWi,j+1和lWi,j+1Wi,j+2表示無人機(jī)飛行路徑中2個連續(xù)路徑段,lW′ijW′i,j+1和lW′i,j+1W′i,j+2是其在xOy平面的投影。

圖3 飛行轉(zhuǎn)角控制參數(shù)示意圖Fig.3 Diagram of flight angle control parameters
記k為軸正方向的單位向量,則lW′ijW′i,j+1的計算式和水平轉(zhuǎn)彎角αij、豎直俯仰角βi,j+1計算式為
lW′ijW′i,j+1=k×(lWijWi,j+1×k)
(22)
(23)
(24)
同時,將無人機(jī)的水平轉(zhuǎn)彎角和豎直俯仰角超出約束限制條件的懲罰系數(shù)分別記作a1和a2,則與無人機(jī)飛行轉(zhuǎn)角相關(guān)的成本函數(shù)F4為
(25)
3.2.5多因素約束的飛行成本函數(shù)
綜合考慮與無人機(jī)飛行路徑Xi相關(guān)的最短路徑、最小威脅,以及飛行高度和飛行轉(zhuǎn)角等限制,基于多因素約束的飛行成本函數(shù)F為
(26)
式中bk——各因素的權(quán)重系數(shù)
4 基于改進(jìn)蝙蝠算法和圓柱坐標(biāo)系的航跡規(guī)劃
將改進(jìn)IBA-FCS算法應(yīng)用于求解農(nóng)業(yè)無人機(jī)安全航跡規(guī)劃模型。考慮模型的多因素約束的飛行成本函數(shù)可行解空間域大,進(jìn)而導(dǎo)致對飛行路徑和航跡規(guī)劃方案的尋優(yōu)難度較大,本文結(jié)合無人機(jī)的飛行轉(zhuǎn)角約束特點(diǎn),提出將航跡規(guī)劃模型的求解空間由笛卡爾坐標(biāo)系變換到圓柱坐標(biāo)系,使得IBA-FCS算法在圓柱坐標(biāo)系空間有更優(yōu)的計算效率,進(jìn)而提升航跡規(guī)劃方案質(zhì)量。
4.1 圓柱坐標(biāo)系
圓柱坐標(biāo)系(Cylindrical coordinate system)是一種三維坐標(biāo)系統(tǒng),它是二維極坐標(biāo)系向z軸的延伸。在笛卡爾坐標(biāo)系中,任給一點(diǎn)P,記ρ和θ為點(diǎn)P在xOy平面投影點(diǎn)的極坐標(biāo),z′是點(diǎn)P的豎坐標(biāo),則點(diǎn)P的柱面坐標(biāo)為P(ρ,θ,z′),其中ρ≥0,0≤θ≤2π。
4.2 基于IBA-FCS算法和圓柱坐標(biāo)系的航跡規(guī)劃解析
將無人機(jī)飛行航跡中的各子路徑記作圓柱坐標(biāo)系的一組向量(ρ,θ,z′),其表示無人機(jī)從一個航點(diǎn)到另一個航點(diǎn)的位置變化向量,取值范圍設(shè)為ρ∈(0,Lpath),方位角θ∈(-π,π),高度z′∈(z′min,z′max),其中Lpath為子路徑長度最大變化量,z′min為子路徑高度的最小變化量,z′max為子路徑高度的最大變化量。一條包含n個路徑點(diǎn)的飛行路徑Ωi可以表示為
Ωi=(ρi1,θi1,z′i1,ρi2,θi2,z′i2,…,ρin,θin,z′in)
(27)
通過將IBA-FCS算法中蝙蝠個體i的位置描述為Ωi,與該蝙蝠個體i相關(guān)的速度向量用位置變化向量ΔΩi來表示,即
ΔΩi=(Δρi1,Δθi1,Δz′i1,Δρi2,Δθi2,
Δz′i2,…,Δρin,Δθin,Δz′in)
(28)

(29)
其中
為了確定蝙蝠群體的個體最優(yōu)位置Pi和全局最優(yōu)位置Pg,需要將基于柱面坐標(biāo)的飛行路徑Ωi映射到笛卡爾坐標(biāo)系的路徑Di,以便計算飛行成本函數(shù)適應(yīng)度。圓柱坐標(biāo)系的點(diǎn)Xij=(ρij,θij,z′ij)∈Ωi到笛卡爾坐標(biāo)系的點(diǎn)Qij=(xij,yij,zij)∈Di的映射過程為
(30)
Pi和Pg的更新公式為
(31)
(32)
5 實驗結(jié)果與數(shù)據(jù)分析
實驗包括仿真實驗和實地場景實驗。在仿真實驗環(huán)境中,基于Matlab R2019a軟件并采用式(16)構(gòu)建了無人機(jī)的飛行環(huán)境基準(zhǔn)地形,系數(shù)組合(at,bt,ct,dt,et,ft,gt)為(10,0.2,0.1,0.6,1,0.1,0.1),h=(40,50,40,40,50,40,40),x0=(100,600,430,160,400,300,500),y0=(1000,110,300,850,600,700,500),xs=(300,200,200,400,300,200,400),ys=(200,200,200,200,200,200,300),該地形的空間區(qū)域為1 000 m×1 000 m×400 m,飛行環(huán)境設(shè)置了8~12個障礙物威脅區(qū);無人機(jī)的最小飛行高度hmin=100 m,最大飛行高度hmax=300 m。
為充分評估農(nóng)業(yè)無人機(jī)安全航跡規(guī)劃模型性能,本文設(shè)置了3次飛行任務(wù),參數(shù)設(shè)置如表3所示,每次任務(wù)的無人機(jī)飛行路徑點(diǎn)數(shù)量均為12(不包括出發(fā)點(diǎn)和目的點(diǎn))。在算法測試方面,IBA-FCS算法的對照算法包括PSO算法、傳統(tǒng)BA算法和ILSSIWBA算法,各算法種群規(guī)模均為500,最大迭代次數(shù)均為300次,獨(dú)立運(yùn)行10次,其余算法參數(shù)同2.5節(jié)。
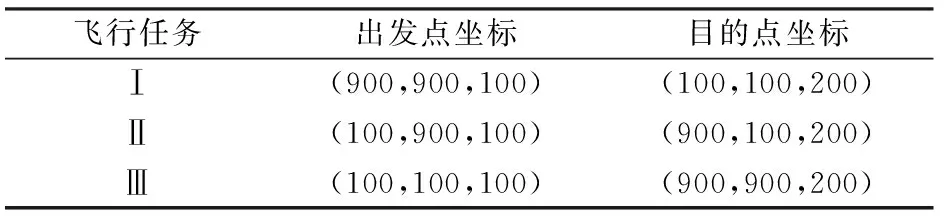
表3 航跡規(guī)劃任務(wù)參數(shù)Tab.3 Parameters of track planning task m
5.1 IBA-FCS算法與對照算法對比
針對不同的飛行任務(wù),各算法求解的無人機(jī)飛行成本函數(shù)適應(yīng)度如表4所示。其中,飛行任務(wù)Ⅰ、Ⅱ、Ⅲ障礙物威脅區(qū)的數(shù)量分別為8、10、12,無人機(jī)飛行環(huán)境復(fù)雜度依次增加,即能夠?qū)Ω魉惴ǖ膶?yōu)性能進(jìn)行多維度測試分析。實驗結(jié)果表明,在3次飛行任務(wù)中,與各對照算法相比,IBA-FCS算法結(jié)果均具有一定優(yōu)勢。從定性分析的角度看,在飛行任務(wù)Ⅰ、Ⅲ中,傳統(tǒng)BA算法結(jié)果優(yōu)于PSO算法,但在飛行任務(wù)Ⅱ中,傳統(tǒng)BA算法的均值和最差解不如PSO算法,這表明傳統(tǒng)BA算法具有一定的跳出局部最優(yōu)的能力,但其尋優(yōu)魯棒性不強(qiáng);ILSSIWBA算法結(jié)果優(yōu)于PSO算法和傳統(tǒng)BA算法,但劣于IBA-FCS算法,而IBA-FCS算法相較于對照算法有效降低了陷入局部最優(yōu)的概率,并具有更高的全局搜索能力和尋優(yōu)魯棒性。從定量分析的角度看,與傳統(tǒng)BA算法相比,IBA-FCS算法在3次飛行任務(wù)中求解的飛行成本函數(shù)適應(yīng)度依次下降21.644 4%、21.768 1%、17.593 9%,其飛行成本函數(shù)適應(yīng)度平均下降20.335 5%。
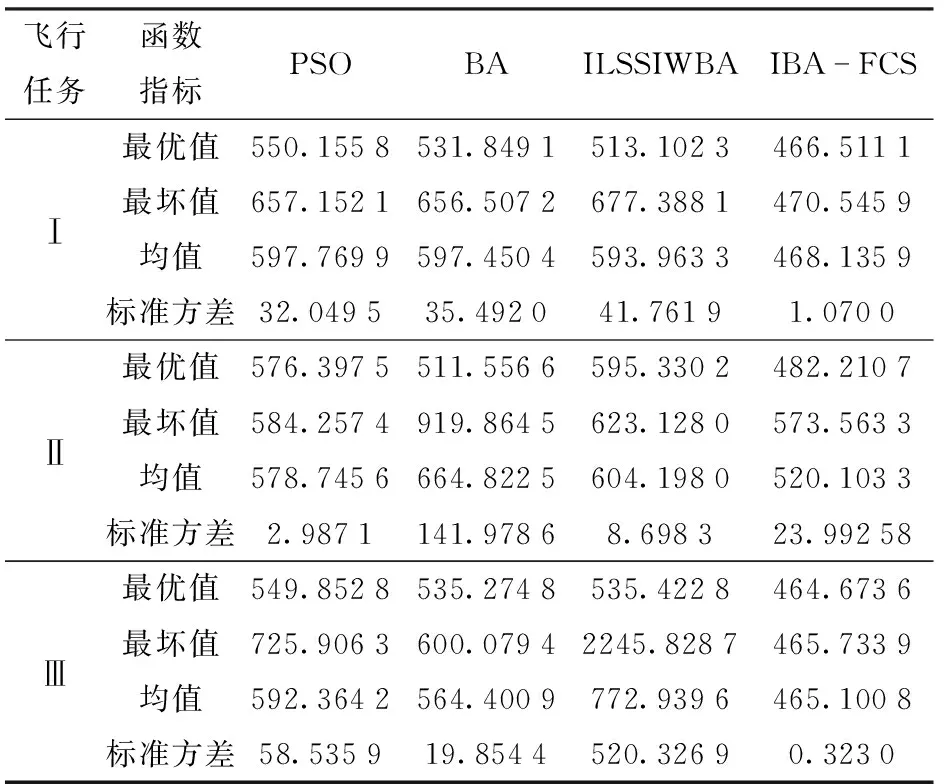
表4 飛行成本函數(shù)適應(yīng)度Tab.4 Fitness of flight cost functions
基于各算法求解的無人機(jī)航跡規(guī)劃方案之一(俯視圖)如圖4所示,圖中,方形點(diǎn)為出發(fā)點(diǎn),圓形點(diǎn)為目的點(diǎn)。從圖中可知,對照算法求解的航跡規(guī)劃方案均不能逼近最優(yōu)的飛行路徑,部分路徑段出現(xiàn)嚴(yán)重偏離目的點(diǎn)方向的情況,嚴(yán)重影響了飛行成本函數(shù)適應(yīng)度;與之相比,IBA-FCS算法求解的飛行路徑趨于平滑,在躲避障礙物威脅區(qū)的基礎(chǔ)上始終與目的點(diǎn)方向保持一致,因此其無人機(jī)航跡規(guī)劃方案質(zhì)量更好。
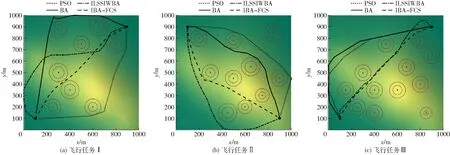
圖4 航跡規(guī)劃方案Fig.4 Track planning schemes
5.2 基于不同坐標(biāo)系的IBA-FCS算法結(jié)果
本文提出將航跡規(guī)劃模型的求解空間由笛卡爾坐標(biāo)系變換到圓柱坐標(biāo)系,以此來提升IBA-FCS算法的尋優(yōu)效率。為進(jìn)一步探究不同坐標(biāo)系對IBA-FCS算法求解無人機(jī)航跡規(guī)劃方案的影響,基于相同的飛行環(huán)境設(shè)置了飛行任務(wù)對照實驗。其中,出發(fā)點(diǎn)為(100 m,900 m,100 m),目的點(diǎn)為(900 m,100 m,200 m)。基于笛卡爾坐標(biāo)系和圓柱坐標(biāo)系的IBA-FCS算法求解的無人機(jī)飛行成本函數(shù)適應(yīng)度(獨(dú)立運(yùn)行10次)如表5所示,無人機(jī)航跡規(guī)劃方案之一(俯視圖)如圖5所示,其中IBA-FCS表示基于圓柱坐標(biāo)系的改進(jìn)蝙蝠算法,RIBA-FCS算法表示基于笛卡爾坐標(biāo)系的改進(jìn)蝙蝠算法。實驗結(jié)果表明,基于圓柱坐標(biāo)系的IBA-FCS算法尋優(yōu)性能和魯棒性整體優(yōu)于其在笛卡爾坐標(biāo)系的算法結(jié)果,飛行成本函數(shù)適應(yīng)度平均下降4.612 7%。這主要是因為圓柱坐標(biāo)系能夠通過控制柱坐標(biāo)向量的方位角來在IBA-FCS算法初始化階段生成滿足無人機(jī)飛行轉(zhuǎn)彎角約束的可行解,進(jìn)而減小可行解域的搜索空間,同時通過約束極軸和方位角分量,以及其與無人機(jī)最大飛行速度、最大轉(zhuǎn)彎角度之間的相互關(guān)系來提高算法的尋優(yōu)效率。

表5 基于不同坐標(biāo)系的IBA-FCS算法結(jié)果Tab.5 Results of IBA-FCS algorithm using different coordinate systems

圖5 基于不同坐標(biāo)系的航跡規(guī)劃方案Fig.5 Track planning schemes using different coordinate systems
5.3 實地場景實驗與結(jié)果
為進(jìn)一步探究基于IBA-FCS算法的農(nóng)業(yè)無人機(jī)安全航跡規(guī)劃模型性能,在廣東省廣州市天河區(qū)廣東農(nóng)業(yè)技術(shù)展示中心的四季蜜芒種植園進(jìn)行了實地場景實驗。首先,應(yīng)用無人機(jī)高空航拍整體地形(圖6),然后劃出進(jìn)行實驗的空間區(qū)域,即100 m×60 m×30 m;采用手持式地形采樣儀收集實驗區(qū)域地形的三維點(diǎn)云數(shù)據(jù)[28],通過最鄰近插值算法生成無人機(jī)飛行環(huán)境的三維數(shù)字高程地圖(圖7),并將在喬木植株周邊設(shè)置3個障礙物威脅區(qū)(1,2,3),其坐標(biāo)參數(shù)如表6所示。

圖6 實地場景實驗的航拍地形Fig.6 Aerial terrain in field experiment
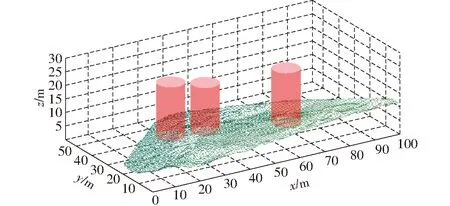
圖7 實地場景實驗的無人機(jī)飛行環(huán)境Fig.7 UAV flight environment in field experiment
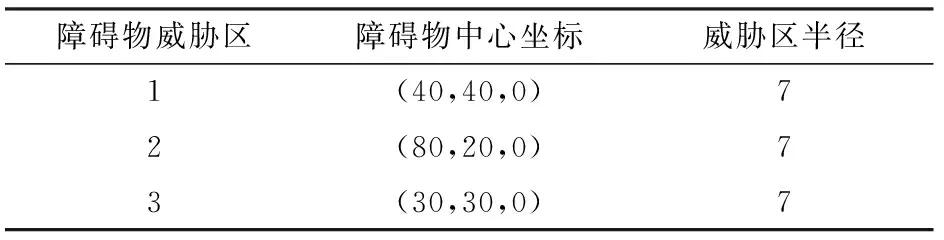
表6 實地場景實驗障礙物威脅區(qū)參數(shù)Tab.6 Parameters of obstacle threat zones in field experiment m
實地場景實驗的飛行任務(wù)出發(fā)點(diǎn)設(shè)為(10 m,10 m,15 m),目的點(diǎn)設(shè)為(50 m,50 m,15 m),基于IBA-FCS算法在圓柱坐標(biāo)系求解的無人機(jī)航跡規(guī)劃方案(俯視圖)如圖8所示,在滿足飛行轉(zhuǎn)角等約束的基礎(chǔ)上,無人機(jī)的飛行路徑能夠躲避障礙物威脅區(qū),并收斂于最優(yōu)航跡。
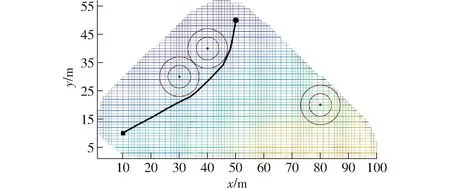
圖8 實地場景實驗的航跡規(guī)劃方案Fig.8 Track planning schemes in field experiment
6 結(jié)論
(1)針對傳統(tǒng)BA算法易陷入局部最優(yōu)解的缺點(diǎn),通過設(shè)計脈沖變頻策略、自適應(yīng)局部搜索策略和變異機(jī)制來提出改進(jìn)的IBA-FCS算法,并應(yīng)用基準(zhǔn)測試函數(shù)驗證了該算法較對照算法具有更好的尋優(yōu)性能。
(2)針對山地果園復(fù)雜地形環(huán)境下的農(nóng)業(yè)無人機(jī)最優(yōu)航跡規(guī)劃問題,結(jié)合無人機(jī)的飛行環(huán)境地形數(shù)據(jù),在綜合考慮最短路徑、最小威脅,以及飛行高度和飛行轉(zhuǎn)角等多因素約束的基礎(chǔ)上,構(gòu)建了農(nóng)業(yè)無人機(jī)安全航跡規(guī)劃模型。
(3)應(yīng)用IBA-FCS算法求解航跡規(guī)劃模型,并通過將模型的可行解空間由笛卡爾坐標(biāo)系變換到圓柱坐標(biāo)系來提升算法的尋優(yōu)效率,通過設(shè)計多個不同數(shù)量障礙物的航跡規(guī)劃任務(wù)對照實驗,表明IBA-FCS算法較傳統(tǒng)對照算法具有更好的航跡規(guī)劃效果。其中,IBA-FCS算法較傳統(tǒng)BA算法飛行成本函數(shù)適應(yīng)度平均下降20.335 5%,基于圓柱坐標(biāo)系的IBA-FCS算法求解的飛行成本函數(shù)適應(yīng)度較基于笛卡爾坐標(biāo)系求解的飛行成本函數(shù)適應(yīng)度平均下降4.612 7%。仿真實驗和實地場景實驗均驗證了山地果園靜態(tài)障礙環(huán)境下本文提出的無人機(jī)安全航跡規(guī)劃設(shè)計方法的有效性。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:34
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
