基于非穩態模擬的SAE 車模氣動減阻降噪研究
2023-03-08 06:33:18楊小龍龔繁龔政黃元康
湖南大學學報(自然科學版) 2023年2期
楊小龍,龔繁 ,龔政,黃元康
(湖南大學 機械與運載工程學院,湖南 長沙 410082)
進入21 世紀以來,汽車行駛速度隨著汽車行業、高速公路的快速發展而不斷提高.汽車高速行駛時的氣動阻力對汽車的燃油經濟性產生重要的影響;噪聲問題也隨著行駛速度的增加而嚴重影響乘客的乘坐舒適性.降低汽車空氣阻力能有效地節省燃油,而降低氣動噪聲能有效地提升乘客的舒適度.減少汽車能源消耗與降低汽車氣動噪聲成為當代車輛設計中考慮的兩大問題,并且成為近些年汽車行業研究的熱點,國內外都對此開展了一定的研究.
在氣動減阻研究方面,Choi 等人[1-2]對簡單的汽車模型應用不同的減阻裝置,研究減阻裝置對流場結構的控制效果.Pujals 等人[3]研究了在模型頂面放置圓形渦發生器時的減阻能力.Sharma 等人[4]利用CFD 方法研究了渦發生器(VGS)對MIRA 模型尾流結構的影響.Eulalie 等人[5]以方背Ahmed 為研究對象,采用了被動和主動的控制策略,最大可獲得10%的減阻效果.Bruneau 等人[6]以方背 Ahmed 模型為研究對象,通過數值模擬方法研究了被動和主動控制方法耦合時的減阻效果,結果表明結合被動和主動控制方法實現了高達30%的減阻率.Wieser等人[7]以階梯背轎車為研究對象,通過風洞試驗方法研究了渦發生器安裝位置對汽車氣動特性的影響.黃莎等人[8]采用基于Realizablek-ε的數值計算方法探索在列車尾部不同位置、不同速度射流對列車周圍湍流流場和氣動阻力的影響規律,在不同的車速下找到最佳射流位置,以提高整車的減阻率.張迪分別以Ahmed、GTS 和 MIRA 模型為對象,研究了非光滑表面對三種模型的氣動減阻效果,并且對Ahmed 和GTS 模型設計了優化方案,優化后最大的減阻效果分別為4.69%和5.18%[9].楊小龍等人[10]研究了非光滑表面對汽車氣動性能的影響,并簡要闡述了非光滑表面的減阻機理.許建民等人[11]采用計算流體動力學方法研究了側風環境下減阻裝置對重型貨車氣動特性的影響,發現復合減阻裝置在所有側風工況下均具有顯著的減阻效果.
對于氣動噪聲研究,Oettle等人[12]綜合介紹了汽車氣動噪聲的產生部位以及不同部位氣動噪聲產生的原理.Purohit 等人[13]通過計算氣動聲學混合方法研究了外激勵對柔性結構遠場氣動噪聲的影響,結果表明有外部激勵時產生的遠場噪聲相較于無外部激勵時降低了近40%.Manikandan 等人[14]以一款商用救護車模型為研究對象,分析了被動控制方法對救護車模型氣動噪聲的影響.汪碩[15]研究了仿生非光滑表面對汽車外流場特性和氣動特性的影響,分析了凹坑分布規律、尺寸和在汽車表面的分布位置等對阻力系數和氣動噪聲的影響.陳鑫等人[16]使用 DrivAer 汽車模型來研究仿生非光滑車外后視鏡罩減阻降噪機理,結果表明車外后視鏡上應用仿生非光滑結構,使整車阻力降低5.9%,側窗外響度降低 19.4%.林肖輝[17]以某品牌量產車模型為研究對象,分析了周圍流場的氣動特性和車身表面的噪聲源及遠場監測點處的聲壓級頻譜圖,并通過對車輪輪轂和后視鏡的造型優化使得整車噪聲得到有效的控制.
上述文獻表明,相關學者分別對氣動減阻以及氣動噪聲做了一定的研究.但是,針對同時降低氣動阻力和氣動噪聲的研究較少.被動減阻裝置依靠改變流場結構來達到降低氣動阻力的目的,但有可能引入新的擾動,從而增大噪聲.如何在降低氣動阻力的同時有效降低噪聲是一個比較新穎的研究方向.此外,氣動噪聲研究需要知道流場中非定常脈動壓力信息,并不能適用于傳統的穩態模擬,需要采用非穩態模型,這對模擬也提出了一定的挑戰.另外,注意到實際車型幾何構造復雜,底盤部件眾多,導致計算量過大,同時不同車型之間缺乏對比和參考,因此目前學術研究仍主要采用標準化車模.同時,模型本身及其研究數據,可在空氣動力學數據定義、實驗標準、計算標準等方面成為溝通語言,便于數據共享,可大量減少汽車開發過程中的重復性工作[18].
本文以20°后背傾角階梯背式SAE 模型為參考模型,在模型后傾斜面頂部和尾部添加新型渦發生器(VGS)和溝槽(RTS),基于非穩態模擬的同時研究了被動減阻裝置在汽車氣動減阻和氣動降噪方面的積極影響.本文的研究內容對于研究汽車協同減阻降噪的方法具有一定的借鑒意義.
1 仿真模型的建立
1.1 SAE模型與計算域
為了不同研究者對比研究的方便,有多種標準化的車模被提出,包括Ahmed[19]、MIRA[20]、SAE[21]、GTS[22]等.本文選擇20°后背傾角階梯背式SAE 模型作為研究對象,因為其具有典型的汽車特點,同時有相應的實驗數據作為參考[23].圖1 為SAE 參考模型,1∶ 5 尺寸縮放的模型在諸如風洞阻塞比、可制造性、可實現雷諾數范圍方面提供了折中的效果.SAE 模型是MIRA 模型的改進模型,模型頭部是一個30°傾斜表面且有著較大的前緣半徑,底板靠近尾部位置有一個用于抵消前傾斜面產生的大俯仰力矩的6°擴散器結構,模型的尺寸為L(長) ×W(寬) ×H(高)=840 mm × 320 mm × 240 mm.如圖2 所示,計算域的尺寸為Ω=10L× 7W× 5H,阻塞比等于2.86%.SAE模型頭部倒角面離入口表面的距離為2L,尾部垂直面距離出口表面7L.

圖1 SAE參考模型Fig.1 SAE reference model
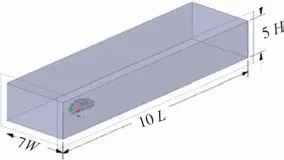
圖2 SAE參考模型計算域尺寸Fig.2 Calculated domain dimensions for the SAE reference model
1.2 計算模型
汽車流場具有三維非定常大分離的特點,而小尺度的減阻裝置增加了流動的復雜性,為了捕捉非定常流場的渦結構,考慮到傳統的雷諾平均模擬(RANS)很難滿足計算精度要求,本文采用了基于SST 模型的改進延遲分離渦模擬(IDDES)方法.IDDES[24-25]湍流模型既能捕捉非定常流場結構,又相比DNS、LES 具有計算量小的優點,目前在工程模擬方面應用比較多,但在汽車模擬方面應用還比較少.而近場噪聲源使用計算氣動聲學方法(Computa?tional Aeroacoustics,CAA)對氣動噪聲直接進行計算,CAA 方法把聲音的傳播也當成流體現象,因此在求解 N-S 方程時能夠同時計算聲音的產生和傳播,在計算流場的同時對聲壓脈動進行求解.
遠場噪聲則采用了FW-H 聲類比方法.Light hill聲類比理論控制方程是由N-S 方程推導出的波動方程,可表示為:
FW-H方程如下:
式中:c為聲速;Tij是Light hill 應力張量;H(f)為Heaviside 函數;δ(f)為Dirac delta 函數;Pij為壓應力張量;p′和ρ分別為聲壓和密度脈動;ρ0為平均密度;u為流體流速;v為平面速度;n為指向外的單位法向向量.方程中聲源面被定義為f=0,x表示監測點的位置.
聲壓級(SPL)和總聲壓級(OASPL)定義如下:
式中:prms為實測聲壓;pmean為平均聲壓;pref=2×10-5Pa,為參考聲壓.
1.3 網格劃分和邊界條件
本文采用多面體網格進行數值仿真,圖3 展示的是計算域流向中心截面的網格分布,并對模型周圍進行了網格加密.
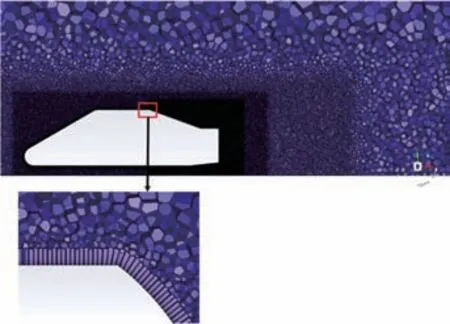
圖3 SAE原模型截面多面體網格Fig.3 Polyhedral mesh of the section of the SAE original model
流場計算域入口為U0=40 m/s 的均勻流速,基于SAE 模型長度的雷諾數為ReL=2.32 × 106.出口邊界為壓力等于大氣壓的壓力出口,SAE 模型和計算域底面設置為無滑移壁面,計算域的兩個側面和頂面都設置為對稱面.時間步長為?t=0.000 1 s,有效頻率范圍計算時間為1.1 s,時均時間約為52個特征周期.
1.4 網格無關性分析與模型驗證
本研究一共采用粗糙網格、中等網格和精細網格3 種網格分別進行了計算.圖4 展示了尾部斜面、行李艙蓋和尾部垂直面上的時均壓力系數,并與Daniel Wood 等人[23]的實驗數據進行了比較.圖4(a)、4(b)、4(c)分別對應粗糙網格、中等網格和精細網格的結果,圖4(d)為Daniel Wood 等人的實驗測量結果.從圖中可知,粗糙網格結果與中等網格和精細網格結果存在很直觀的誤差,而中等網格和精細網格結果之間誤差較小,同時這兩種結果較好地滿足實驗測量結果.為了進一步對尾部斜面的流場進行定量分析,圖5給出了中心截面上沿x方向的尾部斜面和行李艙蓋上方的無量綱時均速度分布,結果表明粗糙網格沒有準確預測尾部斜面上的時均速度,而中等網格和精細網格能較好地與實驗結果相吻合,同時這也驗證了計算模型的準確性.
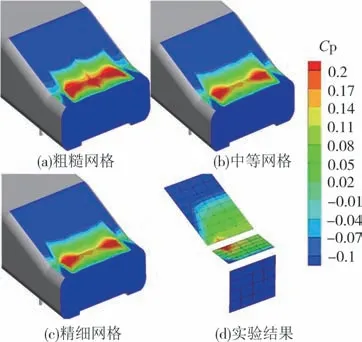
圖4 仿真模擬結果與實驗結果的時均壓力系數對比Fig.4 Comparison of time-mean pressure coefficients between simulation results and experimental results
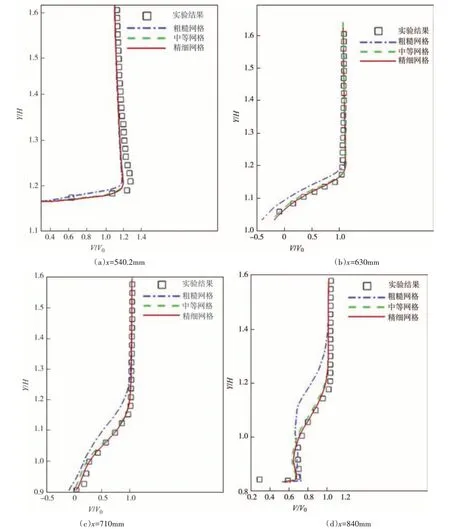
圖5 中心截面上沿x方向的無量綱時均速度分布Fig.5 Dimensionless mean velocity distribution along the X direction on the central section
除此之外,阻力系數的計算結果如表1 所示.粗糙網格相對于中等網格的誤差為3.19%,而精細網格相對于中等網格的誤差為0.49%.為了節約計算資源,本文后續的研究使用具有網格數量較少,但能保證計算精度的中等網格.
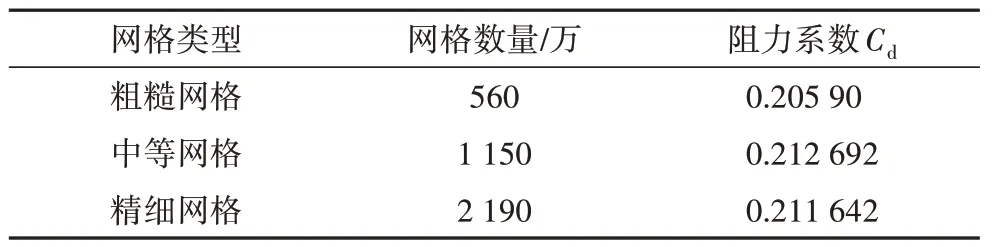
表1 SAE模型3種網格分辨率的網格數量及阻力系數Tab.1 The number of meshes and the drag coefficient of the three mesh resolutions of the SAE model
2 VGS減阻效果研究
2.1 VGS結構尺寸
目前被動減阻裝置有渦發生器、仿生非光滑表面、溝槽和多孔介質等,這里設計了一種新型的半圓柱型渦發生器和溝槽.半圓柱型渦發生器相比圓柱或其他渦發生器,具有尺寸小、結構簡單、易于布置等特點.本文將渦發生器應用在SAE 模型尾部斜面的上沿線附近,結構如圖6 所示.22 個渦發生器均勻分布在尾部斜面的橫向方向上,直徑D=5 mm,其中相鄰渦發生器間隔L=12.5 mm.
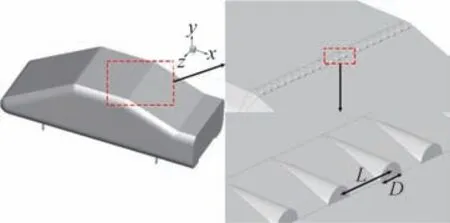
圖6 附加VGS的SAE模型的尺寸參數Fig.6 Dimensional parameters of the SAE model with VGS
2.2 尾流結構對比分析
為了研究VGS 的減阻效果,首先對比分析了尾流流線.圖7 為SAE 模型和附加VGS 的模型在z=0截面上的流向時均速度流線.附加VGS 的模型尾部斜面上的分離渦渦1 消失,因為VGS 抑制了流體的分離,使流體經過斜面時始終附著在斜面上,阻礙了分離渦的形成.通過比較尾部反向旋轉渦的渦核中心位置,可知VGS對尾渦的影響相對較小,僅表現出對尾渦的擾動作用,使得渦3 渦核向下偏移.渦核負壓區遠離尾部以及尾部斜面的分離渦的消失,都會增加尾部近壁面的壓力,從而使得模型頭部和尾部的壓差阻力減小,達到一定的減阻效果.
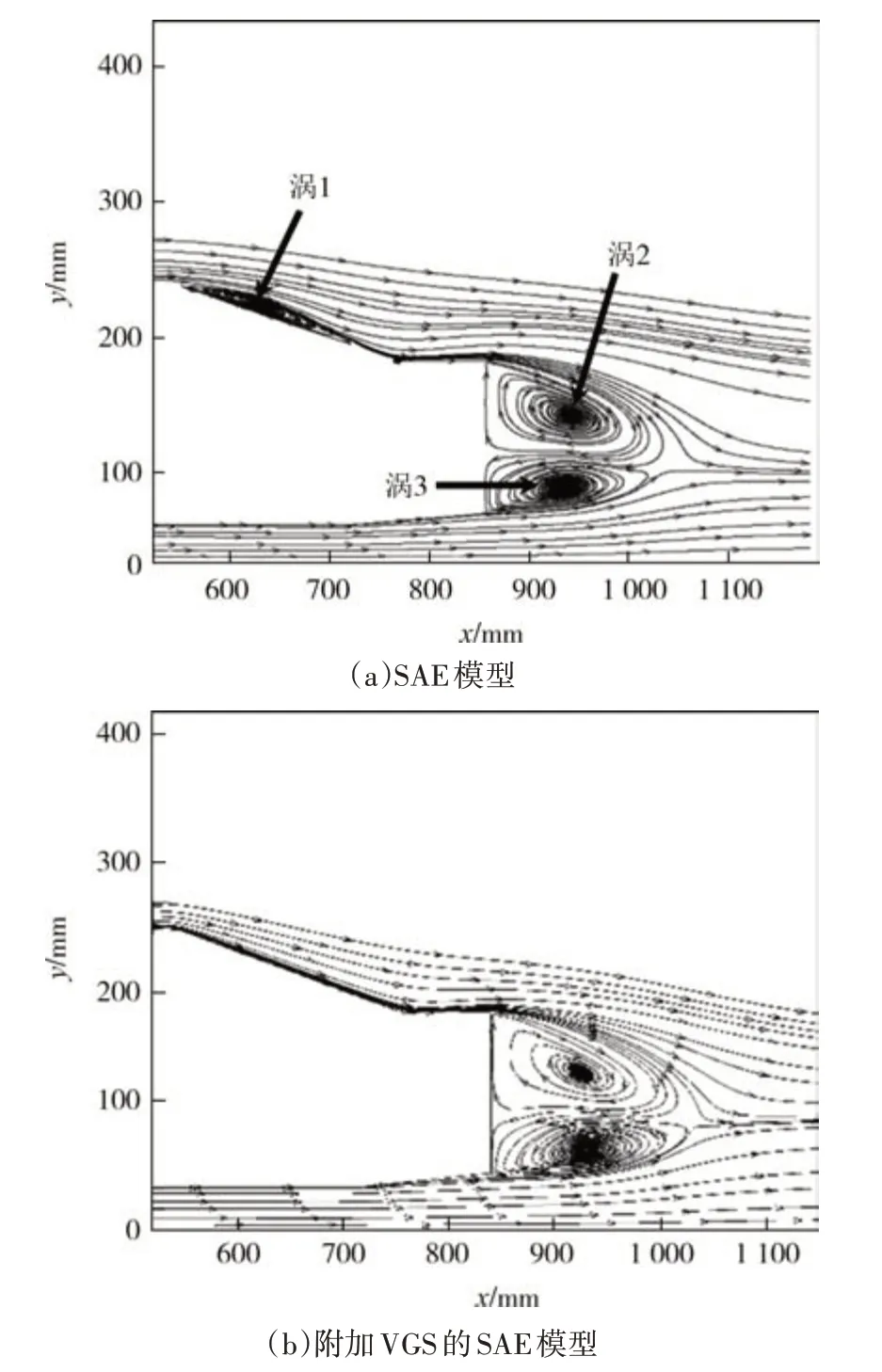
圖7 時均速度流線圖(1)Fig.7 Time-mean velocity flow diagrams(1)
Q 準則等值面通常可以用來顯示鈍體模型的三維渦系結構,圖8 對比了SAE 模型和附加VGS 的SAE 模型Q 準則等值面,展示了兩種模型尾流區的三維渦結構.通過對比圖8 中兩種模型的局部放大圖可以發現,相比于SAE 模型尾部斜面形成的分離渦,附加VGS 的模型產生了一系列抑制尾部斜面分離渦形成的小渦.如圖8(a)所示,當流體從模型頂部流到尾部斜面時,剛開始的分離屬于在平面上的二維形式的分離,然后受C 柱拖拽渦的影響變成更加復雜的三維分離流.在與原模型相對應的位置,VGS后面的小渦使二維分離消失,同時近壁低速區域明顯減小,說明VGS 結構增加了下游近壁區域內的動能,使近壁區邊界層下方和邊界層上方速度梯度減小,延遲了流體分離.
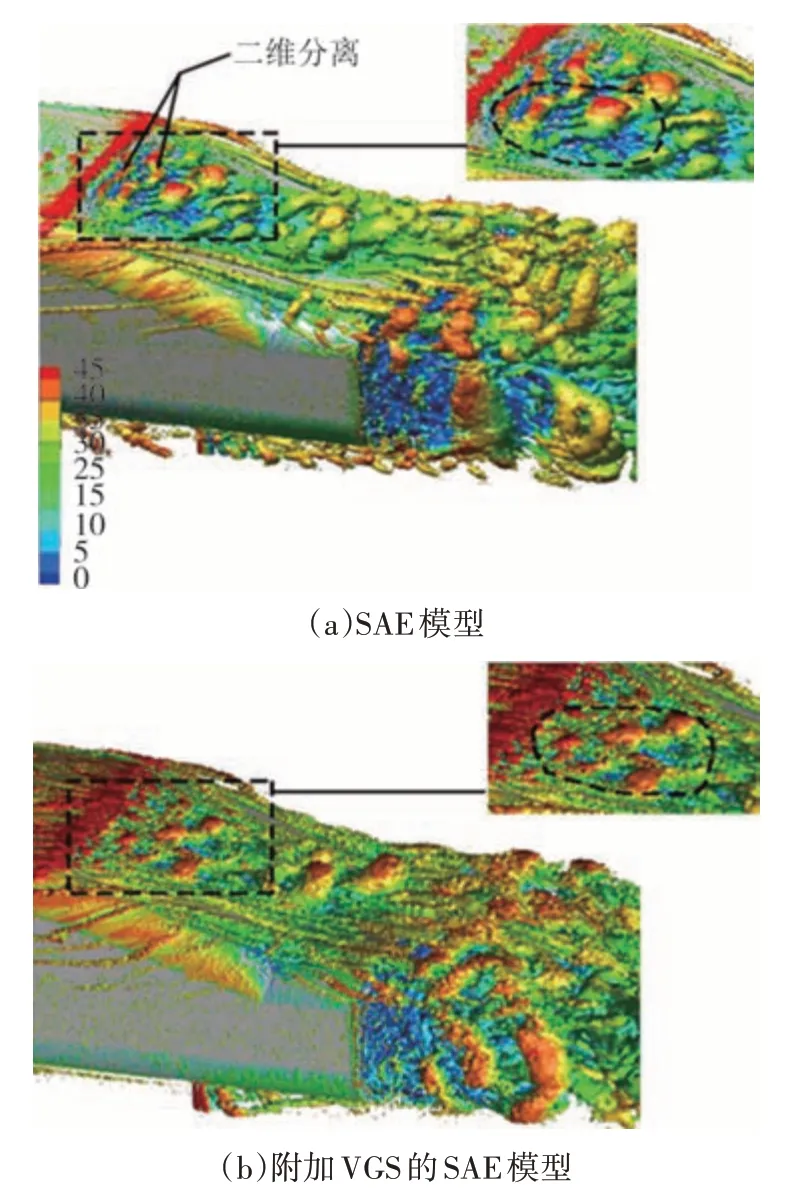
圖8 兩種模型的瞬態Q準則(1)Fig.8 Transient Q criterion for the two models(1)
2.3 阻力系數對比分析
在SAE模型尾部斜面上邊沿上添加的VGS模型與原模型的氣動阻力系數對比結果如表2 所示,結果表明添加VGS 有一定的減阻效果,減阻率約為2.41%.

表2 SAE模型和附加VGS模型的阻力系數和減阻率Tab.2 Drag coefficients and drag reduction rate for SAE model and SAE model with VGS
3 RTS減阻效果研究
3.1 RTS結構尺寸
本文在模型尾部添加了如圖9所示的V 型溝槽.圖9 中展示了尾部垂直面添加V 型溝槽的SAE 模型的全局視圖和尾部垂直面的放大視圖,以及溝槽的局部放大視圖以及尺寸參數.其中溝槽間距S=3 mm,深度H=3 mm.
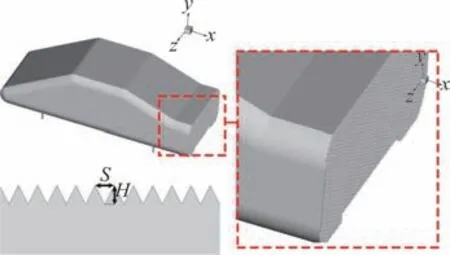
圖9 尾部垂直面添加V型溝槽的SAE模型Fig.9 SAE model with V-riblets added to the vertical surface of the tail
3.2 尾流結構對比分析
圖10 為SAE 模型和附加RTS 的模型在z=0 截面上的流向時均速度流線.與VGS 情況類似,圖10(b)中尾部垂直面上的非光滑表面使得近尾流區的兩渦中心位置向下游移動,特別是上渦的渦核中心,說明尾部面上的RTS 使得行李艙蓋尾沿處的分離延遲,在靠近尾部面上邊沿處還產生了一個衍生渦.另外我們從圖中發現尾部垂直面上的溝槽還影響了尾部斜面上分離渦的形成.
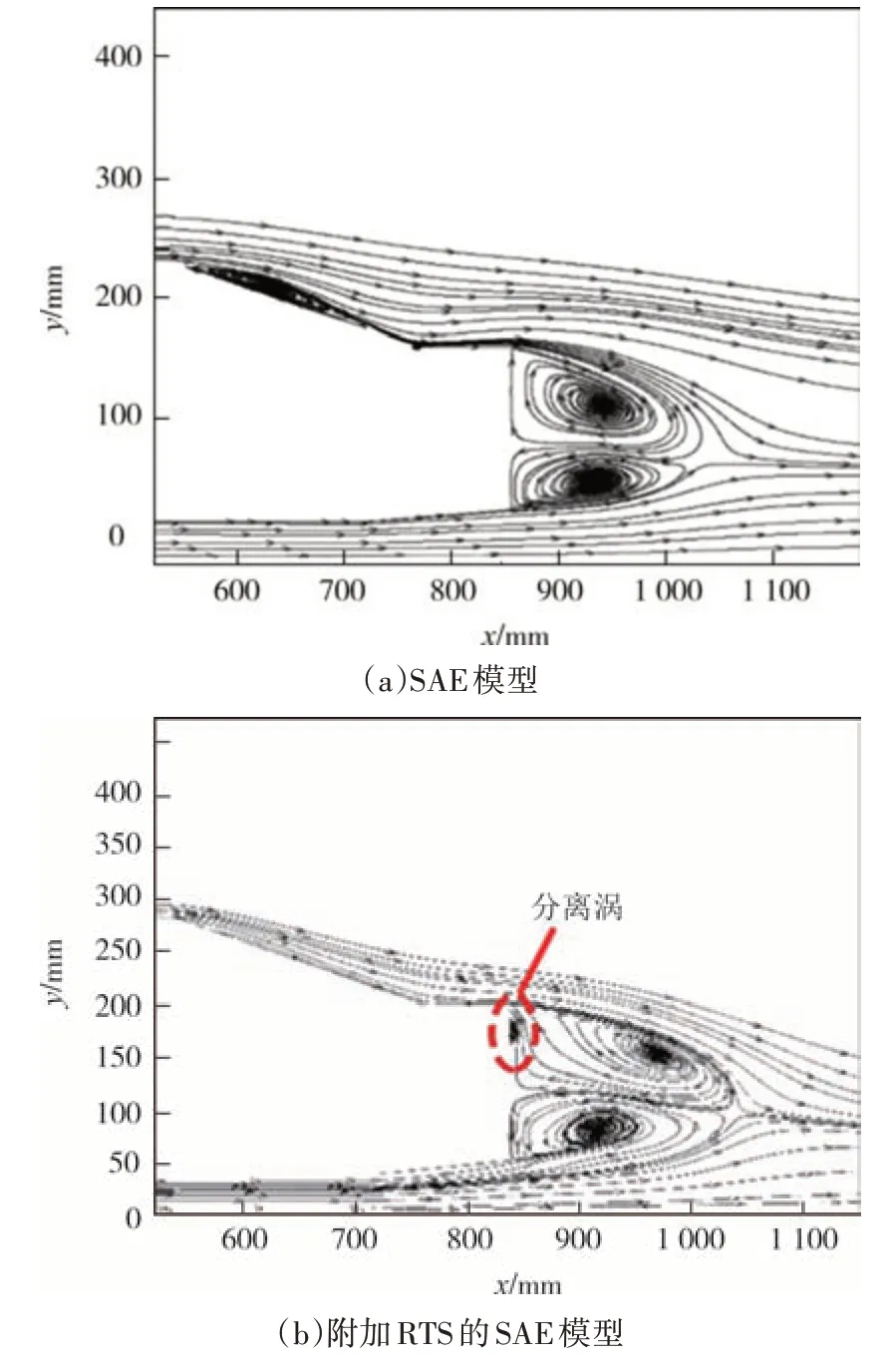
圖10 時均速度流線圖(2)Fig.10 Time-mean velocity flow diagrams(2)
圖11 進一步對溝槽內部流動情況與光滑表面流動情況進行了比較,由圖可知,在圖11(b)尾部面溝槽內部存在許多小渦,這些小渦阻礙了更外層的高速流體與近壁面直接接觸,能夠降低摩擦阻力.同時,V 型溝槽能夠限制流體的橫向運動,使得流動更加穩定,相應減小了湍流猝發強度.
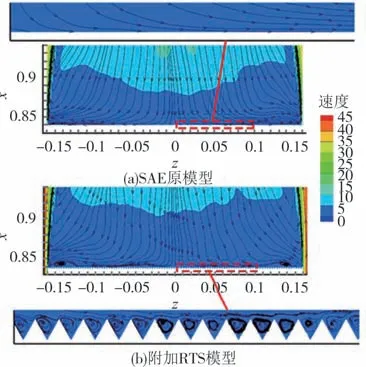
圖11 時均速度絕對值流線圖Fig.11 Flow diagram of absolute value of time-mean velocity
SAE 模型和附加RTS 模型的Q 準則等值面對比如圖12 所示,其展示了兩種模型尾流區的三維渦結構.圖12(b)模型尾部斜面上渦流強度相較于原模型有所減小,近壁面低速區域范圍也相對減小.再對比尾部面上的渦結構,附加RTS 的模型尾部面上有許多條狀的渦結構,溝槽內的這些渦結構能夠限制近壁面更外層的高速流體與壁面直接接觸,從而有利于減小摩擦阻力.
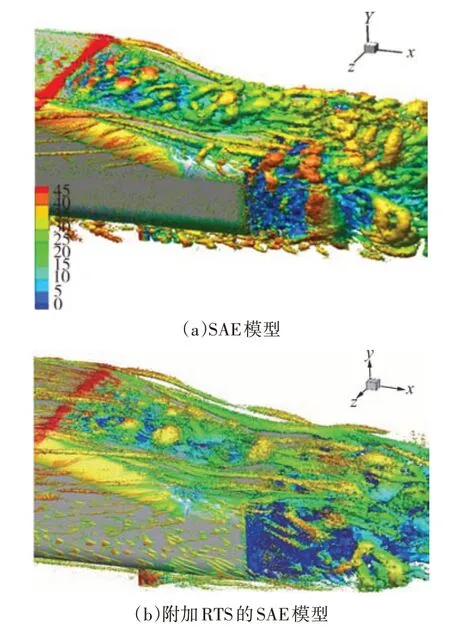
圖12 兩種模型的瞬態Q準則(2)Fig.12 Transient Q criterion for the two models(2)
3.3 阻力系數對比分析
在SAE 模型尾部斜面上邊沿上添加RTS 的模型與原模型的氣動阻力系數對比結果如表3 所示,結果表明添加RTS 有一定的減阻效果,達到2.76%的減阻率.

表3 SAE原模型和附加RTS模型的阻力系數和減阻率Tab.3 Drag coefficients and drag reduction rate for SAE model and SAE model with RTS
4 VGS和RTS對氣動噪聲的影響研究
由于車模后傾斜面頂部和尾部添加了VGS 和RTS,尾流結構會產生變化,從而影響氣流脈動頻率及脈動壓力,所以會使得聲源的分布以及強弱發生變化.減阻裝置在減阻的同時對車輛噪聲產生了影響,本節通過模擬設置近場噪聲監測點與遠場麥克風對被動減阻產生的噪聲進行研究.
4.1 噪聲監測點的布置
通過計算獲得的z=0 截面的脈動壓力如圖13所示,圖13(a)、13(b)、13(c)分別為原模型、附加VGS 的模型和附加RTS 的模型的結果.由圖可知,壓力劇烈變化的位置主要集中在尾流區域,特別是在尾部斜面上的分離渦位置和近尾流區域的兩個旋轉渦位置上,因此尾流區是主要的氣動噪聲聲源.尾流區近場噪聲通過仿真中設置的監測點獲得,監測點的分布如圖14所示,它們都分布在圖13所示壓力脈動劇烈的區域附近以及近尾流下游方向.圖14(a)展示了z=0截面上11個監測點的位置,實際上每個監測點都有左右兩個額外的監測點,如圖14(b)所示.
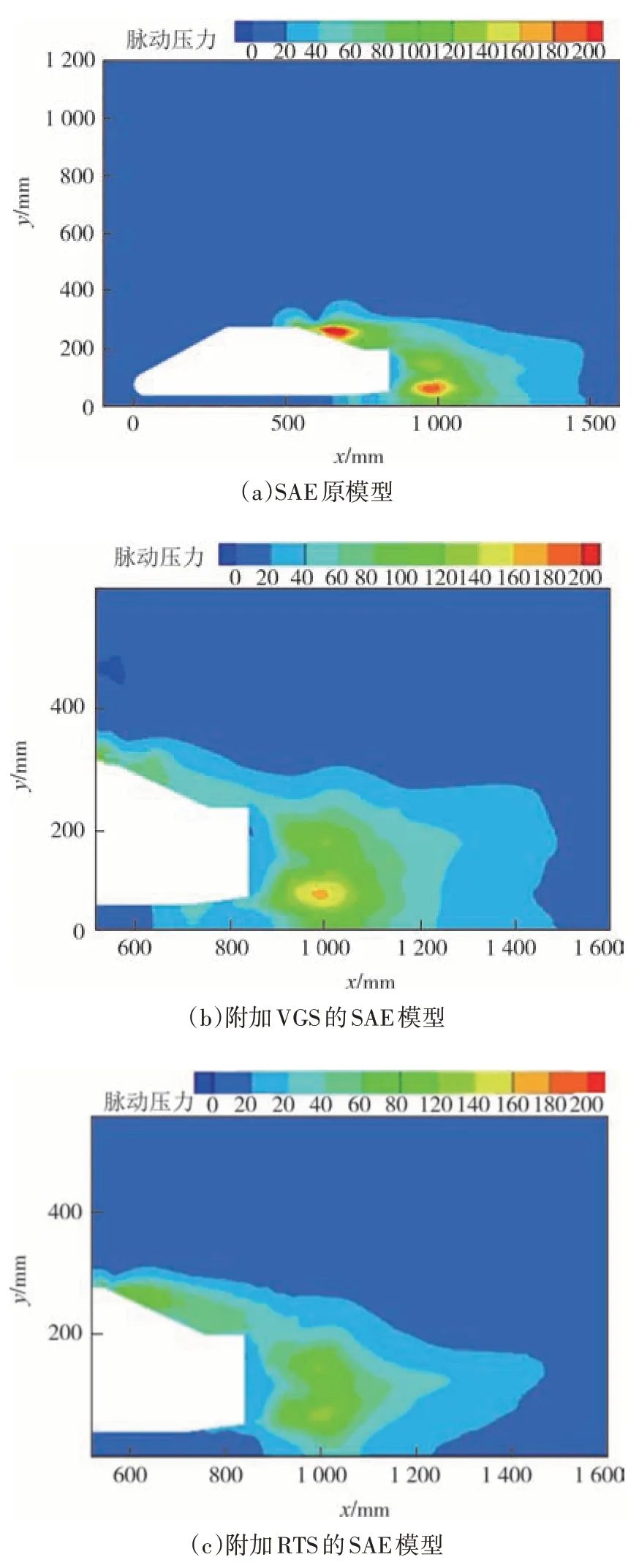
圖13 z=0截面脈動壓力分布Fig.13 Pulsating pressure distribution at section z=0
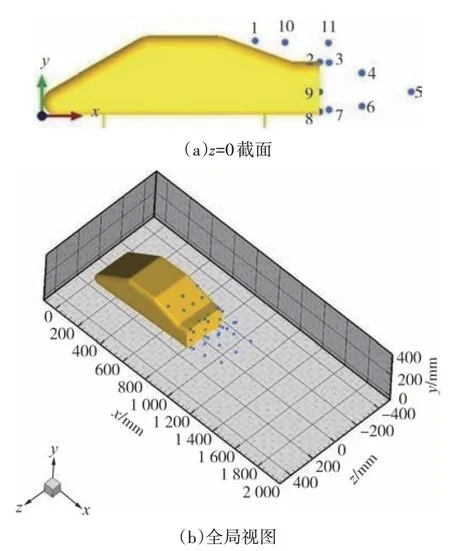
圖14 流場仿真中監測點的分布Fig.14 Distribution of monitoring points in flow field simulation
另外,遠場噪聲也是我們需要關注的.通過仿真模擬設置麥克風來獲取遠場輻射噪聲聲壓級,遠場麥克風的位置分布在以SAE 模型為中心的半徑為10 m 的圓或者半圓上,如圖15 所示,分別為縱向、橫向和水平面上的麥克風分布示意圖.其中縱、橫向截面上的監測點P1~P7與P8~P14對應于極坐標中的0~180°,水平截面上的監測點P15~P27對應于極坐標中的0~330°.
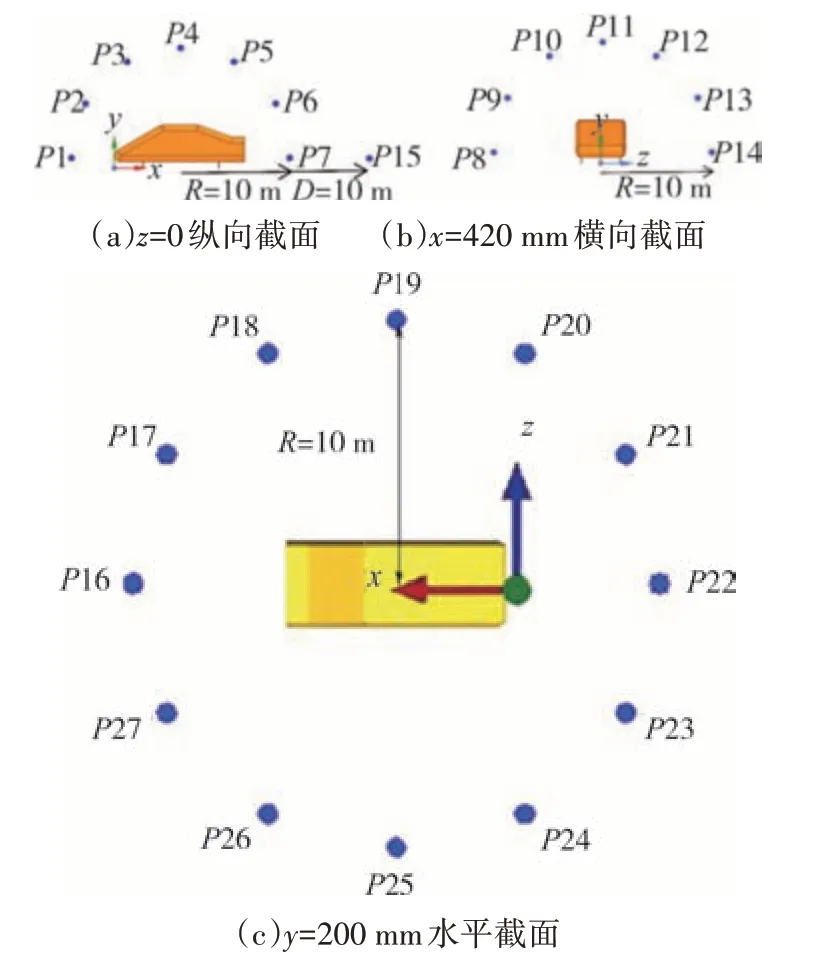
圖15 監測遠場噪聲的麥克風位置分布Fig.15 Microphone position distribution for monitoring far-field noise
4.2 監測點總聲壓級對比分析
大量渦團引起的氣流脈動壓力就是汽車氣動噪聲產生的根源,相對穩定的渦結構可以減少再附著渦量,降低由于氣流脈動引起的氣動噪聲.如前所述,添加在SAE 原模型斜面頂部的VGS 產生的小渦群抑制了尾部斜面上分離渦的形成,產生了相對穩定的渦結構,而尾部添加的RTS 限制了流體的橫向運動,使得流動更加穩定,這在一定程度上都能減小湍流猝發強度,降低氣流的脈動頻率,由氣流脈動產生的脈動壓力也相應降低,這將有利于氣動噪聲的降低.圖16 為通過計算聲學方法所得的SAE 模型和附加VGS的模型以及附加RTS的模型各監測點處的總聲壓級對比.從圖中可知,對于附加VGS 的模型,在1、3、4、6、10 左側監測點處,1、2、3、4、5、7、10、11中間監測點處,1、3、4、6、7、10 右側監測點處總聲壓級均比原模型小,最大差值在點10 中間點處,為9.55 dB.而附加RTS 的模型在3、4、6 左側監測點處,所有中間監測點處,以及2、3、4、5、6、7、9、10 右側監測點處的總聲壓級均比原模型小,最大差值在點7的中間點位置,為5.46 dB.所以SAE 模型添加VGS或RTS 后,均有一定的降噪效果.我們注意到,即使近場噪聲在大部分監測點相較于原模型均有所降低,但同時,也有部分監測點噪聲高于原模型,這是由于VGS與RTS部分監測點位置的渦團數量要大于原模型.
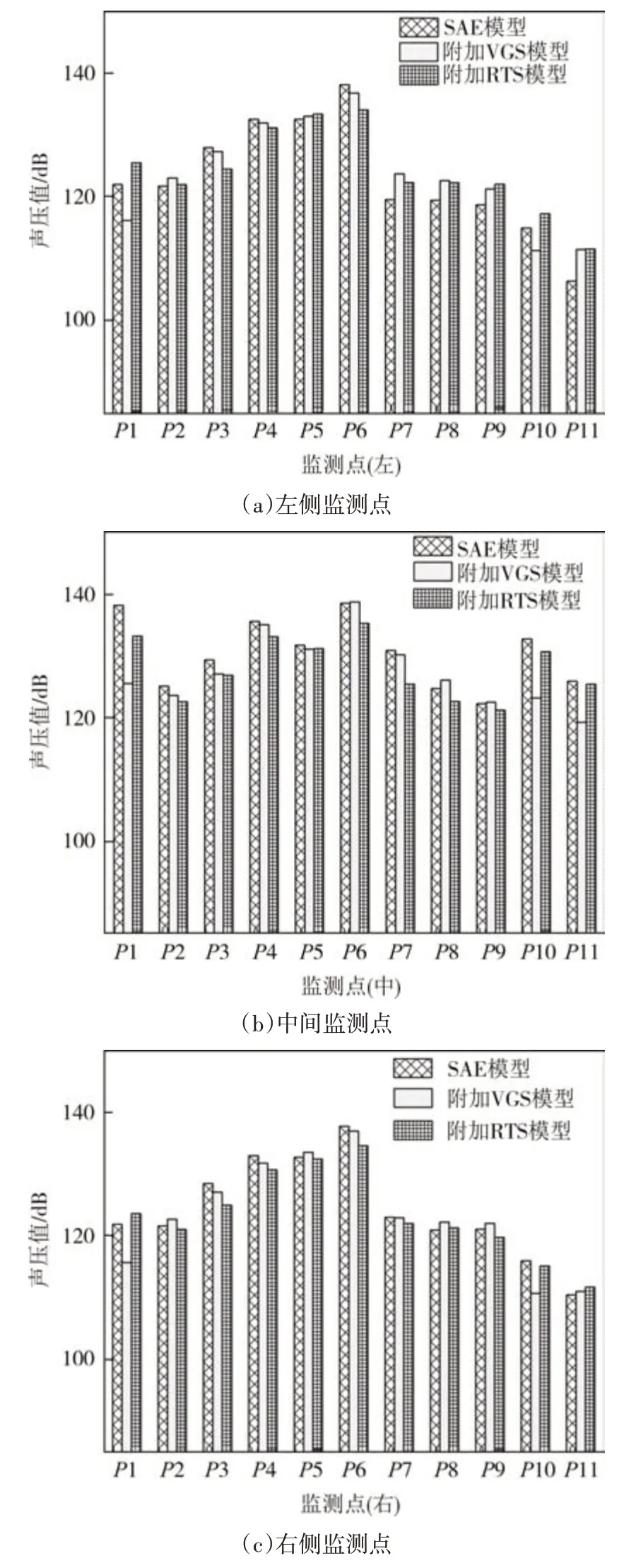
圖16 SAE模型和附加VGS、RTS的模型尾流區監測點總聲壓級對比Fig.16 Comparison of total sound pressure levels in wake area monitoring points between SAE model and SAE model with VGS and RTS
4.3 遠場監測點聲壓指向性分析
添加VGS與RTS的模型與原模型遠場輻射噪聲存在許多共同特征.如圖17 所示,在縱向截面以及橫向截面上,總聲壓級最大的位置出現在模型正上方;在水平截面上,總聲壓級最大的位置是模型兩側,而頭部和尾部的總聲壓級相對較小.在縱向截面上,添加被動減阻裝置對模型上方的噪聲減小有著積極的影響,而其他方向上的總聲壓級差別基本不大.而在橫向截面上,添加VGS 或RTS,各個方向的總聲壓級均小于原模型,且添加RTS 后的降噪效果優于添加VGS.在水平方向上,除頭部和尾部差別不大外,其他方向上添加VGS 或RTS 后均有一定降噪效果,尤其是在模型兩側,降噪效果明顯.
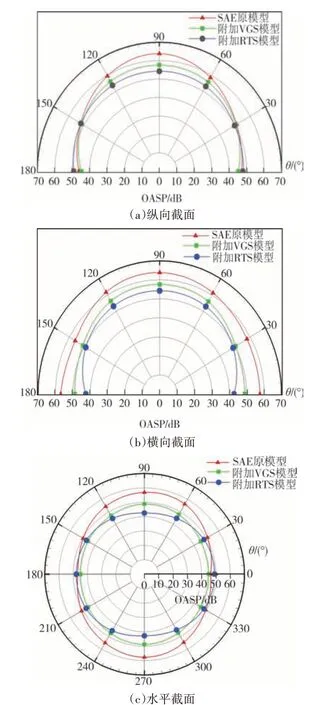
圖17 SAE模型與添加VGS、RTS模型在各監測點的總聲壓級指向性Fig.17 Total sound pressure level directivity at each monitoring point of SAE model and SAE model with VGS and RTS
5 結論
本文使用計算流體力學和計算氣動聲學數值仿真分析方法,結合風洞試驗數據進行準確性和可靠性驗證,以20°后背傾角階梯背式SAE模型為研究對象,分別研究了半圓柱形渦發生器(VGS)和溝槽(RTS)對模型外流場以及氣動聲學的影響,并結合流場參數的變化簡單闡述了附加裝置的減阻降噪機理.本文的研究內容和研究結果表明:
1)相比于SAE 原模型,添加新型半圓柱型渦發生器及溝槽對氣動減阻有積極的影響,其減阻率分別為2.41%、2.76%.
2)在噪聲的控制方面,相較于SAE 模型,添加新型半圓柱型渦發生器及溝槽分別實現了最大9.55 dB、5.46 dB的降噪效果.
3)本文對尾流區噪聲源研究的意義在于綜合評估被動減阻裝置對尾流區氣動噪聲源的影響,對協同減阻降噪具有一定的借鑒意義.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
光學精密工程(2016年6期)2016-11-07 09:07:19
