中央開槽箱梁顫振非線性特性和振動分叉現象及其機理
2023-03-13 05:57:00朱樂東
空氣動力學學報 2023年2期
錢 程,朱樂東,3,*,朱 青,3
(1.同濟大學 土木工程防災國家重點實驗室,上海 200092;2.同濟大學 土木工程學院 橋梁工程系,上海 200092;3.同濟大學 橋梁結構抗風技術交通行業重點實驗室,上海 200092)
0 引言
對于現代化大跨度橋梁,顫振是最危險的一類風致振動現象。目前廣泛使用的顫振理論以Scanlan 線性自激力模型為基礎,該理論將自激力表示為斷面運動狀態的線性函數,將橋梁顫振視為線性氣動失穩現象[1-2]。線性理論認為當風速超過顫振臨界風速時,線性氣動負阻尼大于結構阻尼,橋梁斷面的振幅隨時間呈指數增加而出現顫振發散趨勢。但是鈍體橋梁斷面、或者大風攻角或大振幅狀態下的扁平箱梁斷面,往往不會出現線性理論所預測的無限發散型顫振(硬顫振),而是出現被稱為軟顫振的非線性顫振現象[3]。
根據彎扭耦合程度的強弱,顫振可分為單自由度扭轉顫振和彎扭耦合顫振。單自由度扭轉顫振起振風速低,彎扭耦合程度弱,多發生于鈍體斷面,如雙邊肋斷面[4-6]、H 型斷面[7]、π 型斷面[8-10]和半封閉箱梁斷面[11]。彎扭耦合顫振起振風速高,彎扭耦合程度強,多發生于相對扁平斷面,如扁平閉口箱梁斷面[12-13]。除斷面外形外,相對風攻角越大,附屬設施越多,發生單自由度扭轉顫振的可能性越大,而顫振的彎扭耦合程度一般隨著折減風速的增加而增加[8,14]。
風洞試驗和數值計算表明,對于不同斷面或相同斷面不同風攻角情況,顫振的非線性特性會呈現出多樣性。有時只有在人工初始激勵振幅大于臨界振幅時,顫振才會發生,并最終為極限環振動狀態。現有研究結果顯示:有分叉特性的非線性顫振往往發生于相對扁平斷面(如扁平矩形斷面[15]、扁平閉口箱梁斷面[16])和桁架梁斷面[17],且多發生在高風速和大振幅條件下,彎扭耦合程度較強。然而,對于具有分叉特性的非線性顫振及其機理的研究目前還不多。
中央開槽斷面是一種顫振臨界風速較高的斷面,被廣泛用于超大跨度橋梁建設中[18-19]。對于超大跨度纜索承重橋梁,風的靜力作用會導致主梁產生較大且沿橋跨方向不均勻分布的扭轉變形,從而產生顯著的附加攻角。張宏杰等[20]對1 400 m 主跨閉口箱梁斜拉橋方案的抗風穩定性研究結果顯示,在-3°和3°初始風攻角下,主梁跨中的附加攻角可分別達-6°和5°,有效風攻角可分別達到-9°和8°,顯然會對其顫振性能產生不利影響。因此有必要研究中央開槽斷面在大攻角范圍內的顫振非線性特性,全面深入地把握其顫振性能,提升超千米中央開槽斷面主梁纜索承重橋梁的抗風設計水平。
為此,本文通過節段模型風洞試驗對其中央開槽箱梁斷面在±10°的大攻角范圍內的顫振性能進行了研究,發現了發生于不同風攻角范圍顫振的有/無分叉兩種非線性特性,并通過分析對應的系統等效阻尼比隨振幅的演化規律,對上述有/無分叉兩種非線性特性的機理就行了探討。
1 風洞試驗簡介
中央開槽箱梁斷面如圖1 所示,采用嘴尖偏下的風嘴氣動布局方案,以便使橋梁的風致靜力失穩臨界風速稍高于顫振臨界風速[21]。此外,為了控制渦激共振幅值,在下腹板內側設置導流板,在橋面處設置風障。
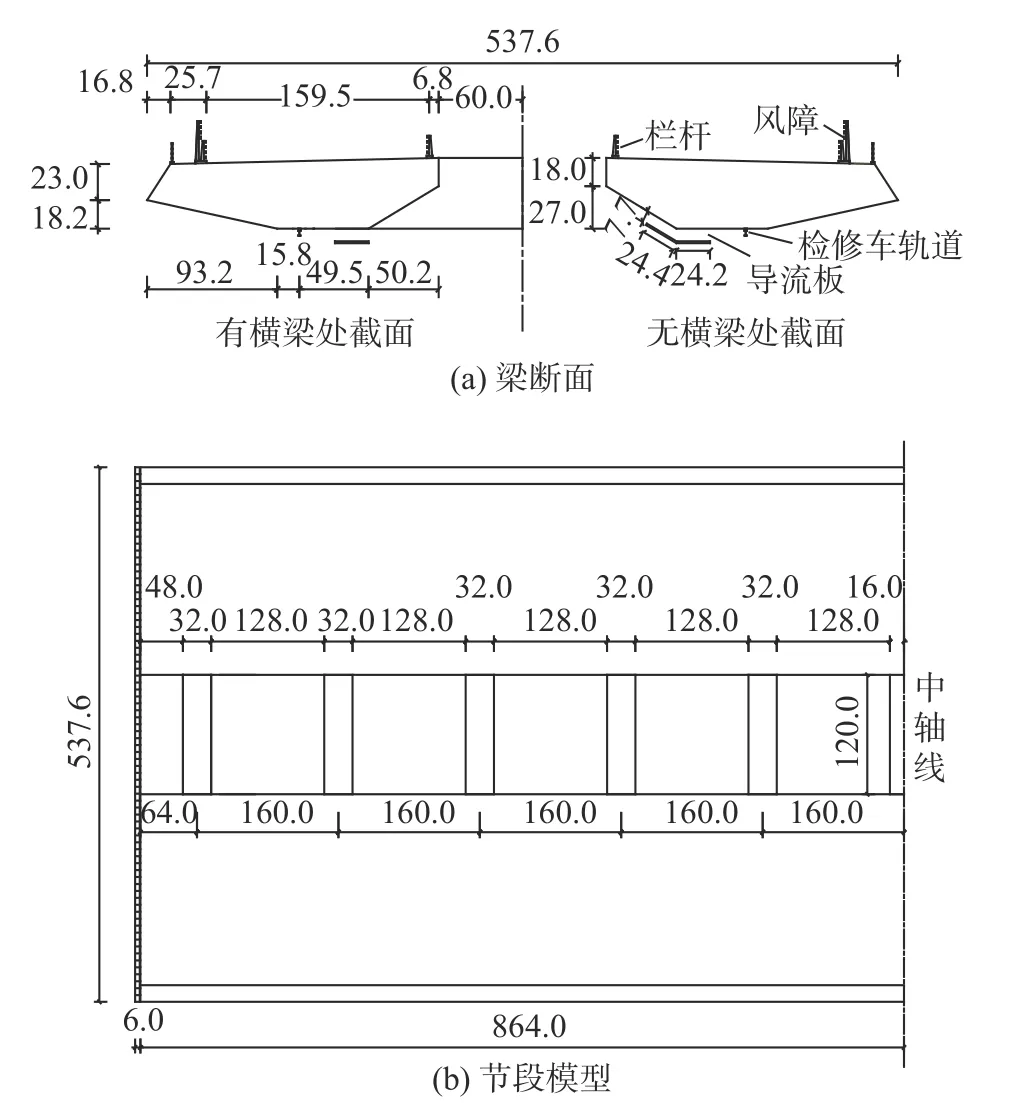
圖1 中央開槽箱梁示意圖(單位:mm)Fig.1 Diagram of centrally-slotted box bridge deck (unit: mm)
節段模型的縮尺比為1 : 100,全長為1.740 m,寬度為0.537 m,高度為0.045 m,橫梁中心間距為0.16 m。彈簧懸掛剛體節段模型測振試驗在同濟大學TJ-1 大氣邊界層風洞完成,節段模型試驗的主要參數為:豎彎基頻1.45 Hz,扭轉基頻3.86 Hz,豎彎阻尼比0.003,扭轉阻尼比0.004,每延米豎彎質量6.565 kg/m,每延米轉動慣性矩0.198 kg·m。
試驗過程中,在模型兩端設置端板(見圖2(a)),以保證模型位于二維均勻流場中。為了保證彈簧系統和模型的相對位置不變,在試驗中通過旋轉風洞外轉盤來調節風攻角,并且設置了沿橋面橫向的細長金屬絲(見圖2(b))。該金屬絲可以約束模型的橫向位移,同時可以避免大攻角下重力作用引起的模型橫向位移和彈簧軸線偏離橋面的垂向。通過外轉盤設置初始攻角后,在平均風作用下,模型會產生隨平均風速變化而變化的附加風攻角。在高風速和大初始風攻角下,附加風攻角甚至達到1°左右。考慮到自激力對風攻角的敏感性,為了確保不同風速下試驗現象和自激力參數均對應相同的有效風攻角,在試驗過程中采用朱樂東等[22]提出的“基于實施位移監控的反向旋轉節段模型”方法來消除每級風速下的風致靜力附加風攻角。
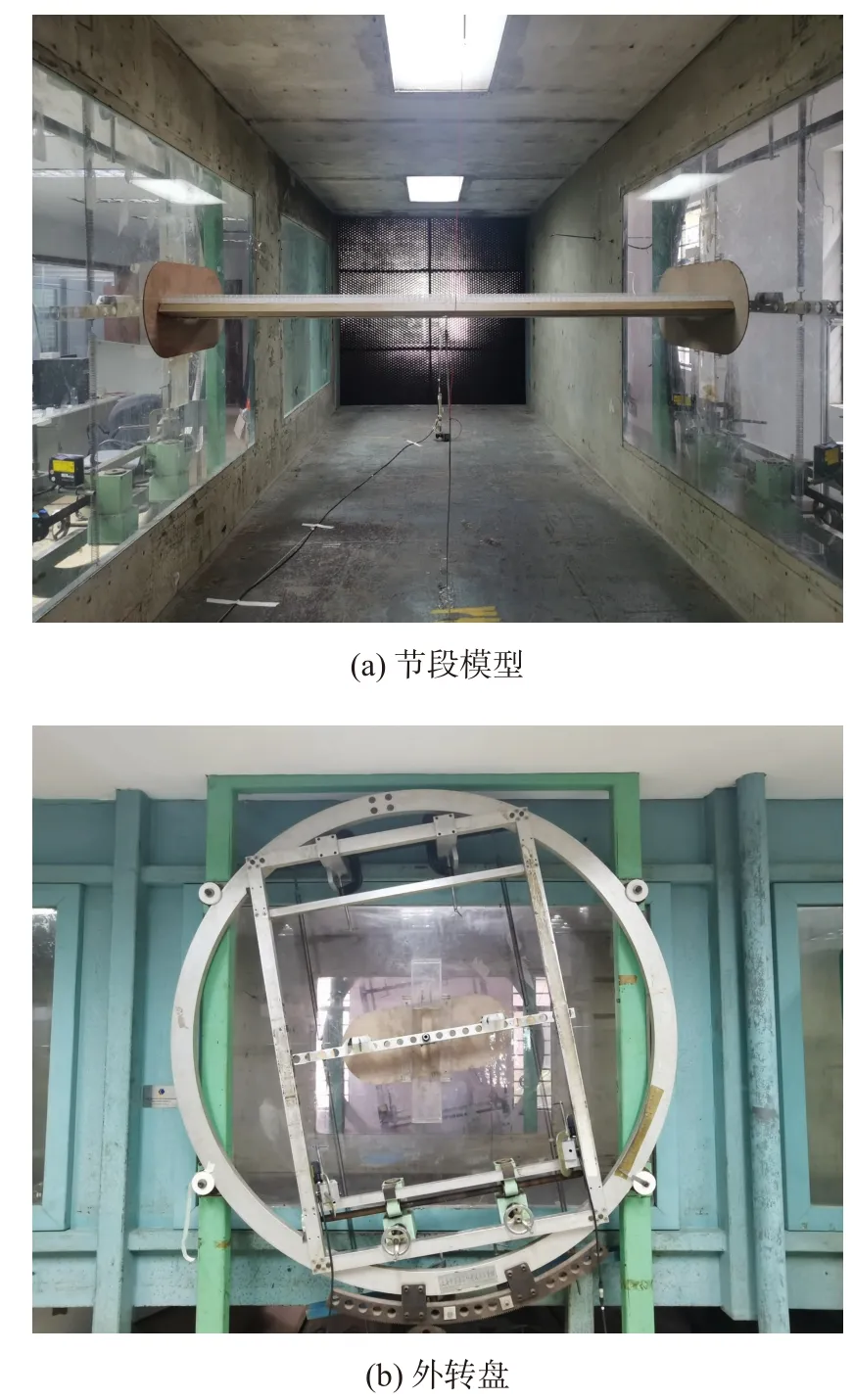
圖2 節段模型風洞試驗裝置Fig.2 Segment model in the wind tunnel test
試驗風攻角為0°、±3°、±5°、±6°、±8°、±10°、-1°、-2°和-4°,因為非線性顫振出現在負角度,所以設置更多負風攻角的工況。受風洞和彈簧懸掛節段模型的限制,本次試驗最高折減風速為10.1,最大扭轉振幅在8°左右。根據試驗現象,將試驗角度分為三類:第一類是負的大攻角(-5°~-10°),在此攻角范圍,振動沒有出現分叉,彎扭耦合非線性顫振無需初始激勵就能從靜力平衡位置自動起振;第二類為負的小攻角(-3°和-4°),在該攻角范圍,振動在一定風速范圍內出現分叉,彎扭耦合非線性顫振需要在足夠大的初始人工激勵下才會發生;第三類是10°~-2°,該角度范圍內沒有發生顫振。
2 顫振的非線性特性
2.1 無振動分叉的非線性顫振
當風攻角介于-5°和-10°之間時,該中央開槽斷面均無需任何人工初始激勵就能從靜力平衡位置自動起振,并具有自限幅的特性。
作為一個典型示例,圖3 給出了α0=-5°、U*=7.33 時節段模型非線性彎扭耦合顫振的扭轉角位移(α)和豎向位移(h)的時程曲線,其中α0為風攻角,U*=U/fB為折減風速。從圖中可以看到,當風速達到或超過顫振臨界風速后,結構能夠自動從靜力平衡位置開始發散;在顫振發展的前期,振幅增長率不斷增大,當振幅達到一定值時,振幅包絡線出現拐點,振幅增速達到最大,然后開始降低,并最終降到0,此時,顫振達到穩定的極限環振動狀態。
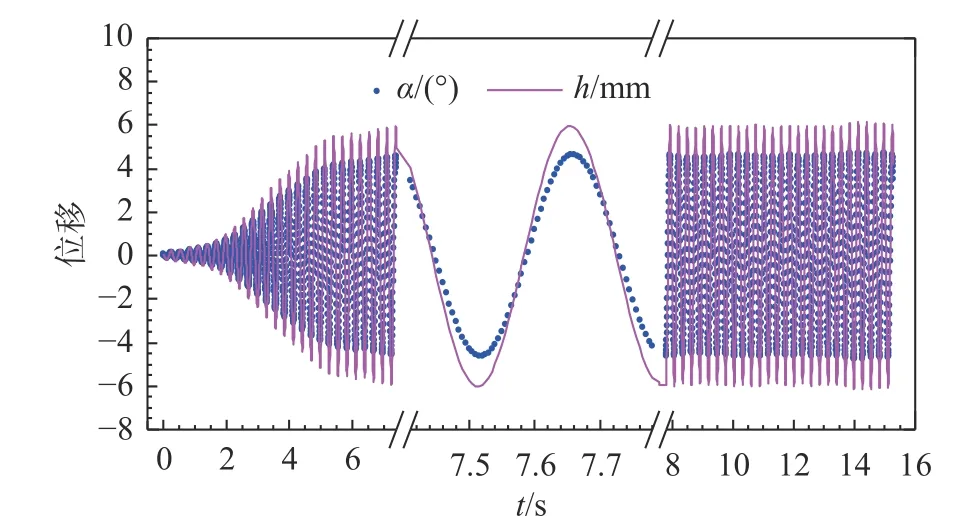
圖3 非線性顫振時的位移(α0=-5°,U?=7.33)Fig.3 Displacement of the nonlinear flutter(α0=-5°,U?=7.33)
從圖3 還可以看到,彎扭耦合顫振的豎彎和扭轉位移之間存在著較小的相位差,可以通過它們之間相圖來體現(如圖4 所示)。相圖為橢圓意味著豎彎和扭轉之間存在相位差,橢圓的面積是相位差大小的一個度量,它等于 πAhtAαt|sin(Δφt)|,其中Aht和Aαt分別為豎向和扭轉位移振幅,Δφt為豎向位移和扭轉位移的相位差。當豎彎運動超前扭轉運動(Δφt> 0)時,橢圓軌跡為順時針旋轉;反之,當豎彎運動滯后扭轉運動(Δφt< 0)時,橢圓軌跡為逆時針旋轉。這樣,從圖4 可以看到,上述工況的非線性耦合顫振的豎彎運動遲滯后扭轉位移一個較小的相位差。
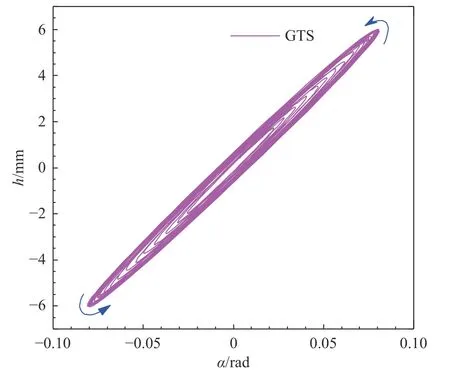
圖4 非線性顫振時位移相圖(α0=-5°,U?=7.33)Fig.4 Phase diagram of the nonlinear flutter(α0=-5°,U?=7.33)
圖5 是α0=-5°、U*=7.33 折減風速時不同初始激勵條件下的扭轉位移,圖6 是對應的扭轉角速度和扭轉角位移之間的相圖。該相圖是系統運動軌跡的幾何表達,通過該相圖可以判斷系統的穩定性、漸近穩定性等,而豎彎位移和扭轉位移的相圖則表明兩個自由度運動之間的關系(圖4)。從圖6 中可以看到,無初始激勵下增長到穩態過程(grow to stableoscillation,GTS)和大初始激勵下衰減到穩態過程(decay to stable-oscillation,DTS ),最終都做極限環振動并具有相同幅值。
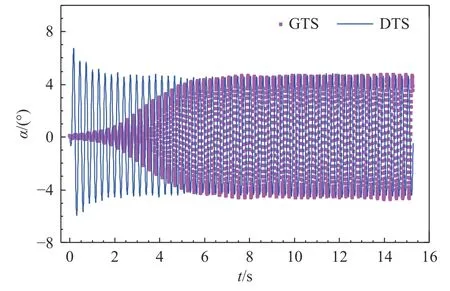
圖5 非線性顫振時的扭轉位移(α0=-5°,U?=7.33)Fig.5 Torsional displacement of the nonlinear flutter(α0=-5°,U?=7.33)
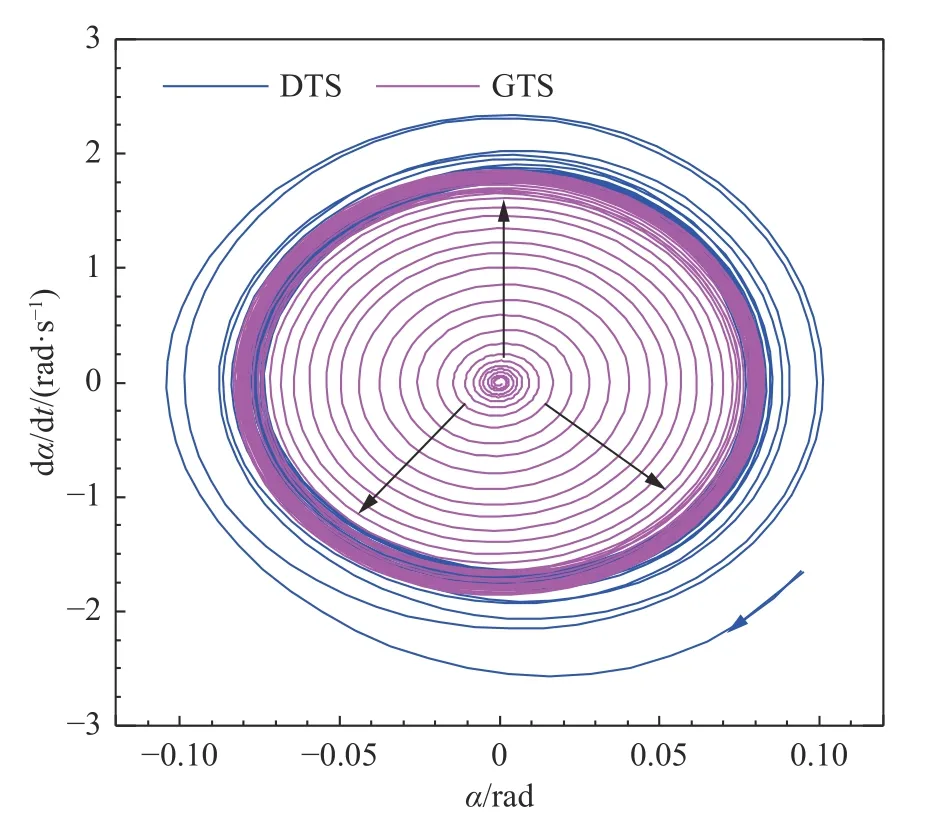
圖6 非線性顫振時的扭轉相圖(α0=-5°,U?=7.33)Fig.6 Torsional phase diagram of the nonlinear flutter(α0=-5°,U?=7.33)
圖7 顯示了不同風攻角下非線性耦合顫振最終極限環振動的扭轉和豎向穩定幅值隨折減風速的變化規律。隨風速的增加,豎向和扭轉位移的穩態振幅同時隨之增加,而且增速總的來說略超線性,同時豎彎振幅增長速率的超線性更明顯一些,說明隨著折減風速的增加,彎扭耦合程度也會略有增加(詳細討論見后)。
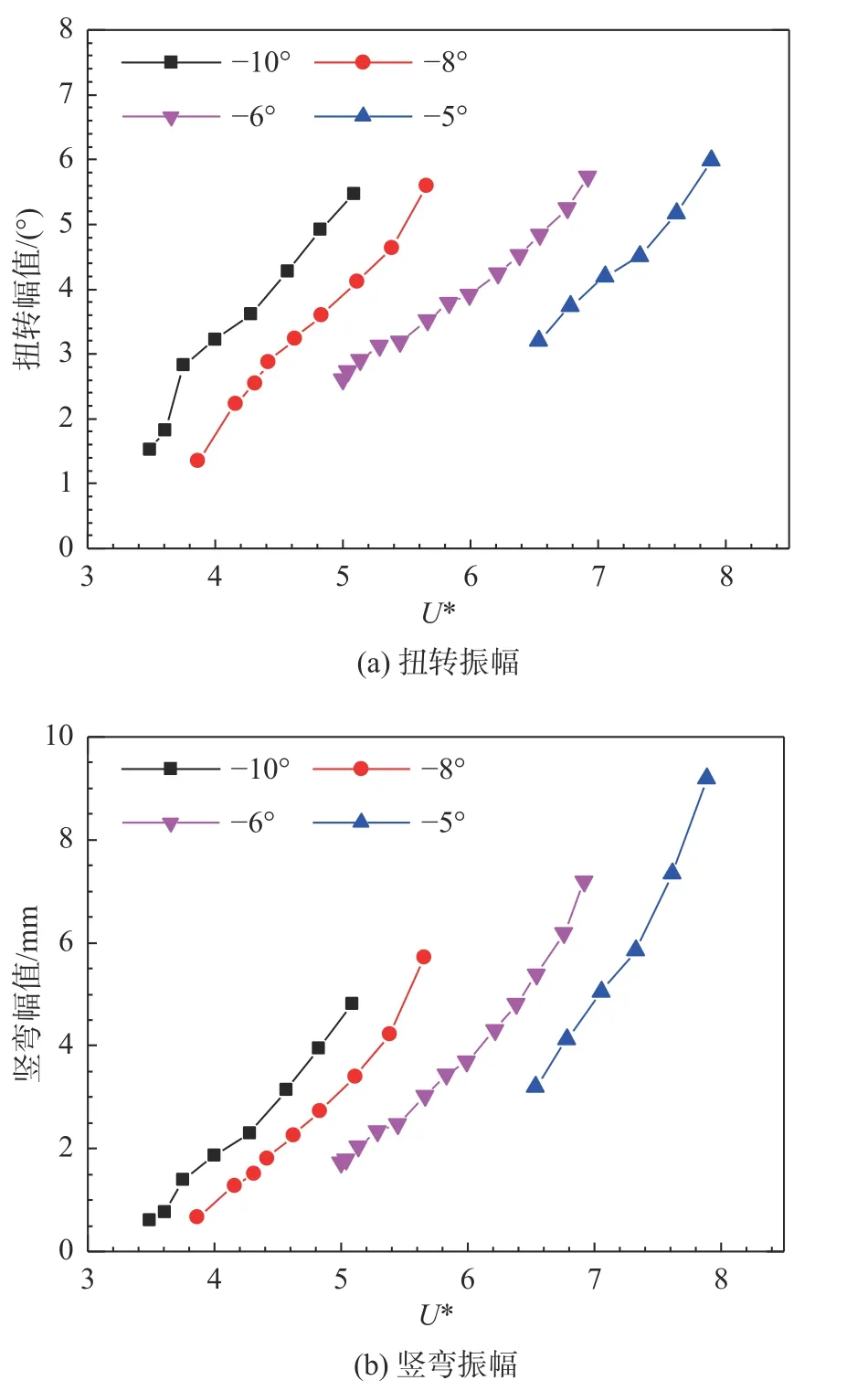
圖7 穩態振幅隨折減風速的變化Fig.7 Steady-state amplitudes variation with the reduced wind speed
此外,當風攻角較小時,中央開槽斷面擁有良好的顫振性能,其顫振臨界風速比較高。但是隨著負攻角的增大,橋梁斷面越來越鈍,非線性顫振的起振風速不斷降低。
圖8 展示了非線性顫振在穩態振動時的頻率f隨折減風速的變化規律,不同于渦激共振時頻率在鎖定風速范圍內基本不變的特點,非線性顫振的穩態振動頻率隨著風速增加而減小,這是因為相對于較低的渦激共振鎖定風速,顫振的發生風速較高,氣動負剛度效應較明顯。此外,相對于折減風速對顫振頻率的影響程度,初始風攻角對顫振頻率的影響較小。
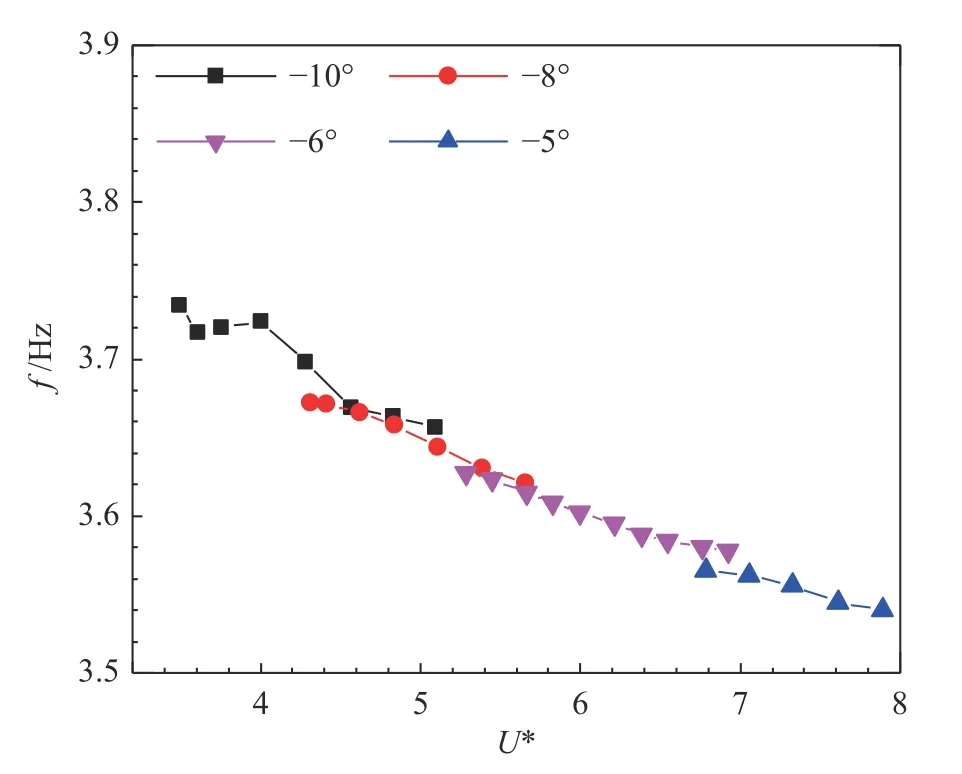
圖8 穩態頻率隨折減風速的變化Fig.8 Steady-state frequency variation with the reduced wind speed
2.2 有振動分叉的非線性顫振
對于本文所研究的中央開槽斷面,在-3°和-4°這樣較小負攻角時,均出現彎扭耦合的分叉振動現象。以風攻角α0=-4°為例,通過分析U*=8.75(分叉振動區間前)、U*=9.04(分叉振動初期)、U*=9.53(分叉振動末期)和U*=9.80 時(分叉振動區間后)四個不同階段的振動特征來說明試驗中觀測到的有振動分叉現象時的顫振特點。
圖9 和圖10 分別是U*=8.75 時模型系統在大初始激勵下的振動位移時程和扭轉角速度-扭轉角相圖。從圖中可見:此時即使在8°左右的大初始激勵下,模型系統仍然做衰減至靜態平衡位置的自由衰減振動(decay to zero,DTZ)。此時,既沒有出現振動分叉現象,也沒有發生顫振,但是在整個DTZ 振動過程中,振動的衰減速率經歷了由快到慢再到快的變化過程,系統和氣動阻尼呈現顯著的非線性;尤其是在中期,扭轉位移時程存在一段非常緩慢衰減的區間(對應相圖中相應幅值處的圓環密度顯著提高),表明系統阻尼接近0。這個現象的內在原因將在后面的第3 節中討論。
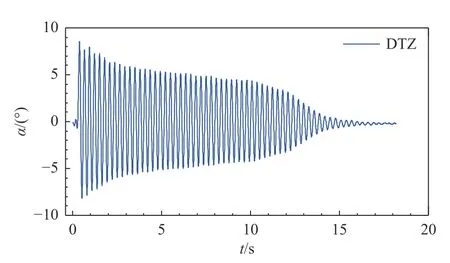
圖9 分叉振動前的扭轉位移(α0=-4°,U?=8.75)Fig.9 Torsional displacement before the bifurcation vibration(α0=-4°,U?=8.75)
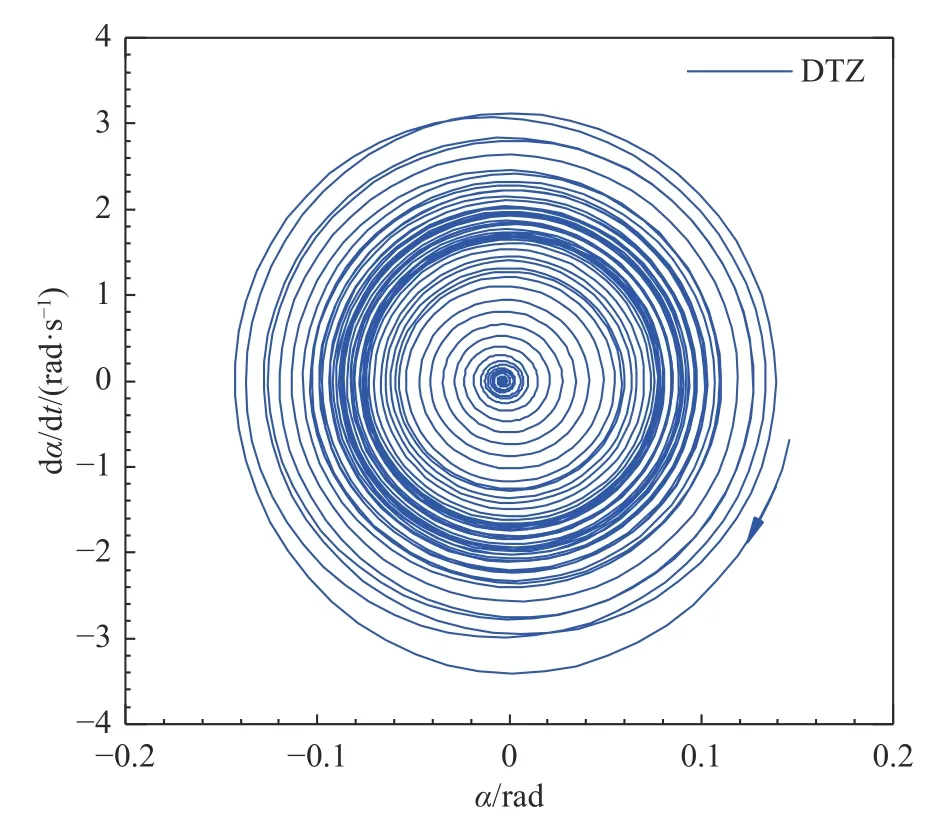
圖10 分叉振動前的扭轉相圖 (α0=-4°,U?=8.75)Fig.10 Torsional phase diagram before the bifurcation vibration(α0=-4°,U?=8.75)
稍微提高折減風速至U*=9.04 后,節段模型系統就出現了帶有振動分叉現象的非線性顫振。圖11 和圖12 顯示在U*=9.04 時(分叉振動的初期)的扭轉位移時程曲線和扭轉角速度-扭轉角相圖。從圖中可見,存在一個約4°的起振振幅和約6°的穩態振幅,當初始激勵振幅小于起振振幅時,振動將呈現衰減形態,并最終衰減至振幅為0 的靜態平衡位置;當初始激勵振幅大于起振振幅并小于穩態振幅時,振動將逐漸發展、并最終收斂于振幅為該穩態振幅的動態平衡位置,即穩定的極限環振動狀態;當初始激勵振幅大于該穩態振幅,振動有會呈現出衰減趨勢,并最終衰減至振幅為該穩態振幅的動態平衡位置,即穩定極限環振動。
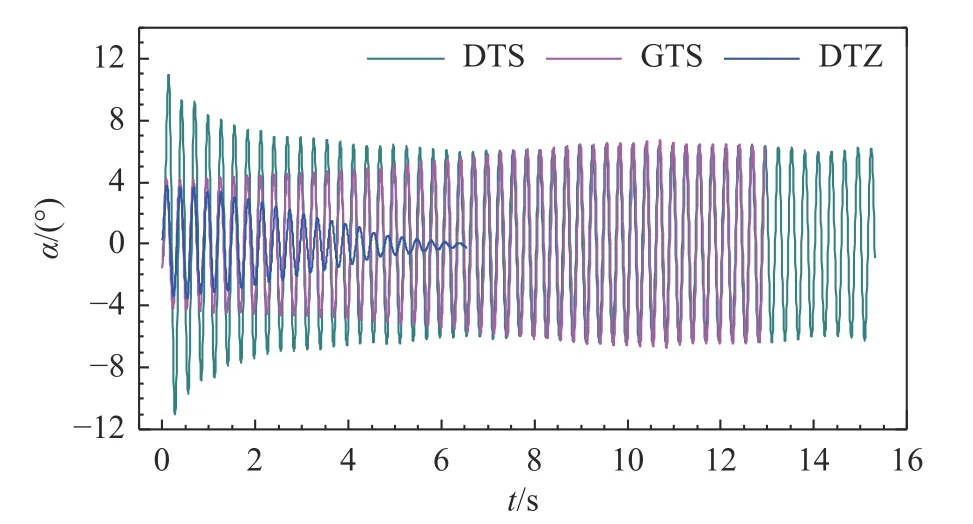
圖11 分叉振動初期的扭轉位移(α0=-4°,U?=9.04)Fig.11 Torsional displacement at the initial stage of the bifurcation vibration (α0=-4°,U?=9.04)
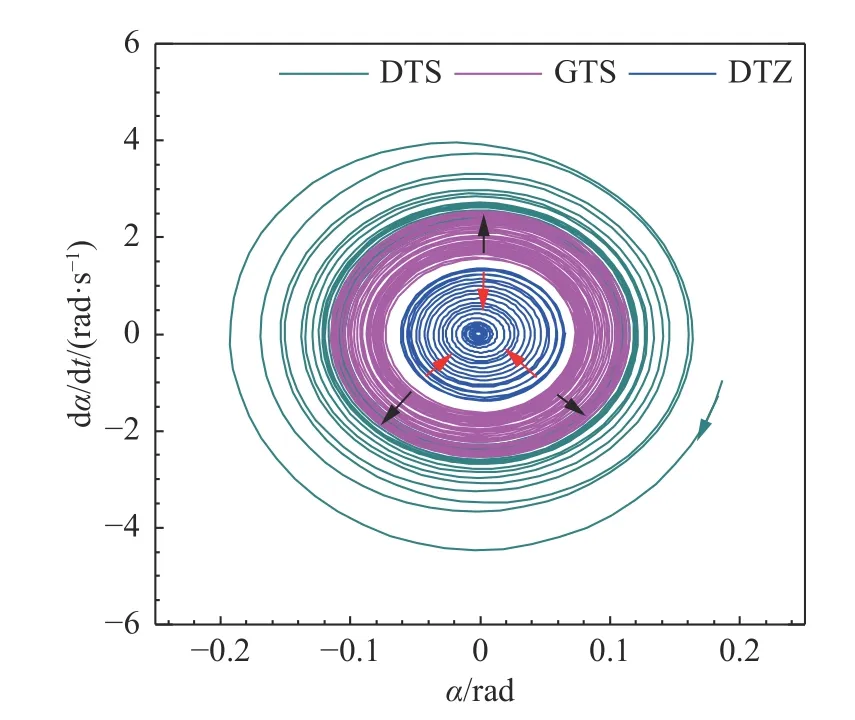
圖12 分叉振動初期的扭轉相圖(α0=-4°,U?=9.04)Fig.12 Torsional phase diagram at the initial stage of the bifurcation vibration (α0=-4°,U?=9.04)
從時程曲線圖和相圖還中可以看出:分叉振動存在三個平衡狀態,即,一個靜力平衡狀態(零位移點)、一個不穩定動力平衡狀態(振動的分叉點)和一個穩定動力平衡狀態(穩定極限環振動狀態)。當初始位置落在藍色區域內(靜力平衡點和不穩定極限環之間),結構振動幅值會逐漸衰減到0;當初始位置落在洋紅色環狀區域內(穩定極限環和不穩定極限環之間)時,結構振動會發展至穩定的極限環振動狀態;當初始位置落在外圍的深青色區域內(穩定極限環外),結構振動會衰減至穩定極限環振動狀態。
繼續提高折減風速至U*=9.53,節段模型系統仍會出現類似的帶有振動分叉的非線性顫振。圖13 和圖14 是U*=9.53 時扭轉位移時程圖和扭轉角速度-扭轉角相圖。在該折減風速下,分叉振動仍然存在前述三個平衡狀態,但與U*=9.04 時的分叉振動初期相比,隨著折減風速的增加,起振幅值降低到1.2°左右,而穩態幅值上升到7.3°左右,在相圖上表現為藍色衰減區域面積減小,洋紅色發散區域面積增加。因為結構的穩態振幅已經很大,受試驗裝置的限制,沒有給予更大的初始激勵。
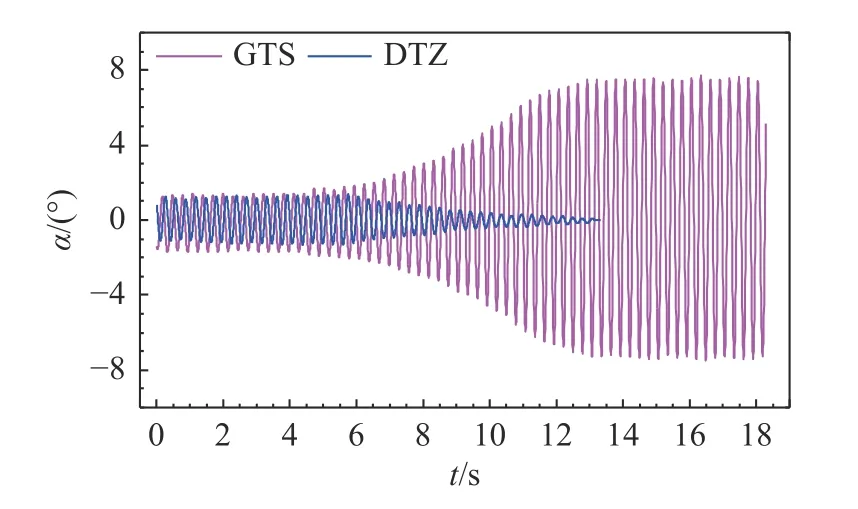
圖13 分叉振動末期的扭轉位移(α0=-4°,U?=9.53)Fig.13 Torsional displacement at the final stage of the bifurcation vibration (α0=-4°,U?=9.53)
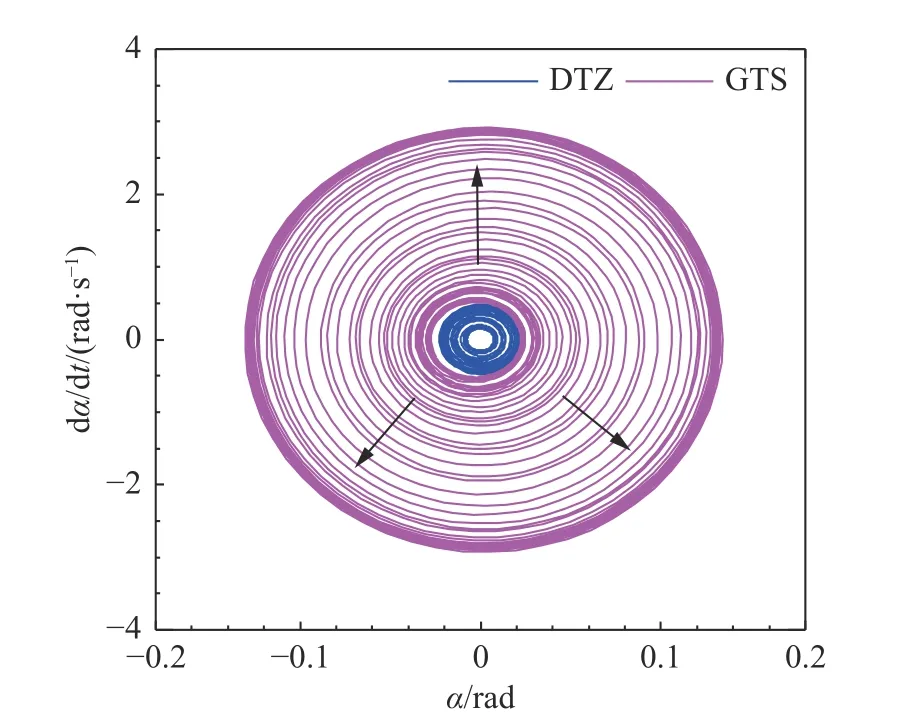
圖14 分叉振動末期的扭轉相圖(α0=-4°,U?=9.53)Fig.14 Torsional phase diagram at the final stage of the bifurcation vibration (α0=-4°,U?=9.53)
當再繼續稍微增加折減風速至U*=9.80 時,分叉振動現象消失,說明上一步U*=9.53 已處于出現分叉振動現象的后期。如圖15 和圖16 所示,當U*=9.80 時,節段模型系統的起振振幅等于0,藍色衰減區域退化成點,即結構不需要任何人工初始激勵就能夠自動從靜力平衡位置發散,并最終穩定于振幅更大的極限環振動。自此,隨著折減風速的增加,節段模型均能從靜力平衡位置自動起振并達到穩定的極限環振動狀態。
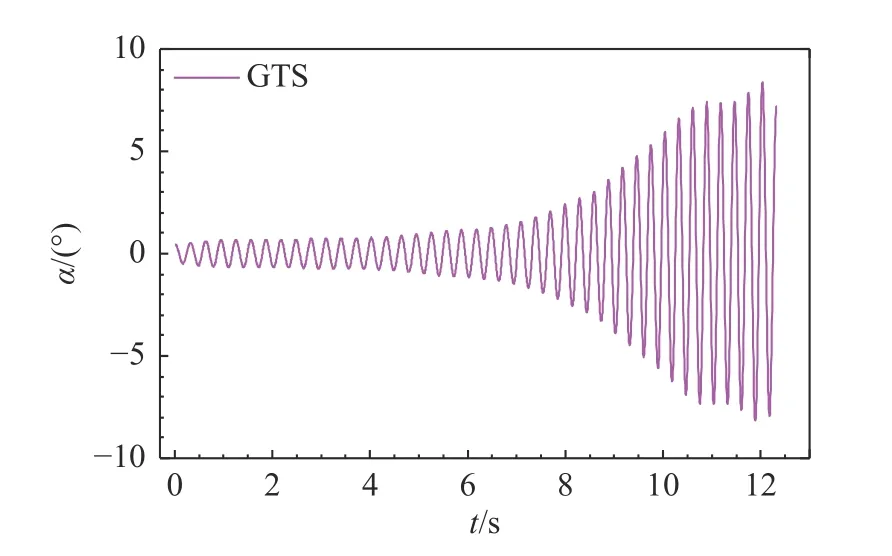
圖15 分叉振動區間后的扭轉位移(α0=-4°,U?=9.80)Fig.15 Torsional displacement after the bifurcation vibration(α0=-4°,U?=9.80)
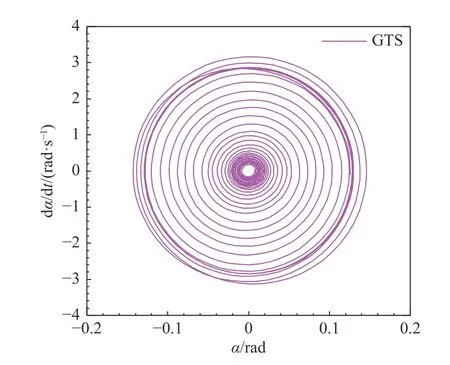
圖16 分叉振動區間后的扭轉相圖(α0=-4°,U?=9.80)Fig.16 Torsional phase diagram after the bifurcation vibration(α0=-4°,U?=9.80)
在分叉振動風速區間,非線性顫振存在穩定和不穩定兩個極限環,但是不穩定極限環對應的起振振幅難以通過試驗精確獲取。在本次試驗中,為了獲得較準確的起振振幅,在每個風速下都進行了多次激勵,并不斷調整初始激勵的大小以接近起振振幅,最終取DTZ 時程的最大扭轉振幅和GTS 時程的最小扭轉振幅的均值作為起振振幅。從圖17 還可以看到,顫振起振振幅隨著風速增加而減小;在分叉振動初期,穩態振幅和起振振幅非常接近,當起振振幅減小到0 時,分叉振動現象消失,結構的自限幅彎扭耦合非線性顫振能夠從靜力平衡位置自動起振。
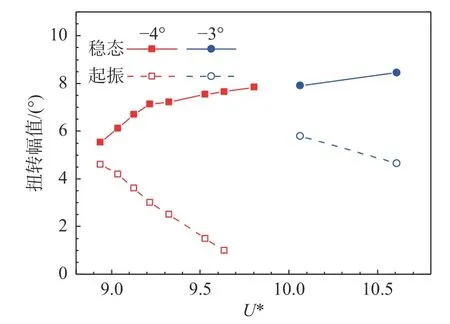
圖17 非線性自限幅顫振起振振幅和穩態振幅隨折減風速變化Fig.17 Steady-state amplitude and onset amplitude variations with the reduced wind speed in the nonlinear self-limiting flutter
2.3 振動形態
對于彎扭耦合顫振,在每個時刻可看成是偏心的單自由度扭轉運動,偏心率e分別由振動頻率及相位所控制。當運動方程如下時:
偏心率e如下式所示:
這里,ωt為圓頻率,b為半橋寬。當相位差 Δφt=0時,e=Aht/(Aαtb) 。當 Δφt≠0 時,e∈[-∞,+∞],并隨時間而變化,但如下式定義的偏心率均值仍為定值:
在斷面上游側離中心距離為處,振動幅度最小,其運動方程為如式(4):
雖然此點不是固定不動的扭轉中心,但是非線性顫振時相位差一般不大,因此該點的振動幅值特別小,在試驗過程中通過肉眼也可以觀察到。隨著風速的增加,該點會向上游移動。
此外,從公式(2)可以看出,偏心率e與豎向位移、彎扭位移的幅值比值Aht/(Aαtb)成正比,因此大偏心率意味著彎扭耦合程度高。
圖18 展示了不同風攻角下耦合顫振的偏心率均值隨折減風速的變化規律。由此可見,不同風攻角下偏心率均值均隨折減風速增加而近似線性地增加。此外,從圖中還可以看到:當折減風速相同時,較大負攻角下的偏心率均值略高于較小負攻角下的偏心率均值,表明較大負攻角下的顫振耦合程度略高于較小負攻角下的顫振耦合程度。
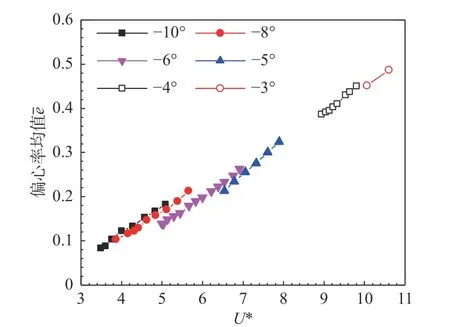
圖18 非線性顫振的偏心率均值隨折算風速變化Fig.18 Mean eccentricity ratio variation with the reduced wind speed in the nonlinear flutter
上述結論表面上看起來似乎與“隨著風攻角增大,斷面越來越鈍,彎扭耦合程度越弱”這一傳統的認識不相符,但實際上并不矛盾。原因在于:人們在討論風攻角變化對顫振耦合程度影響規律時,也總是拿不同風攻角下顫振臨界點的數據進行對比,而忽略了不同風攻角下臨界風速不同這個重要因素。如果按傳統方法僅對比不同風攻角下顫振臨界點處的耦合程度,那么,從圖19 可以看到與傳統觀點一致的結果,即:隨著風攻角的增加,非線性顫振的臨界點的風速隨之降低,對應耦合顫振偏心率均值也相應越來越小,而且兩者隨風攻角的變化趨勢非常相似,說明在顫振臨界點處的耦合程度隨風攻角絕對值增大而下降的主要原因在于對應的顫振起始風速(臨界風速)隨風攻角下降。
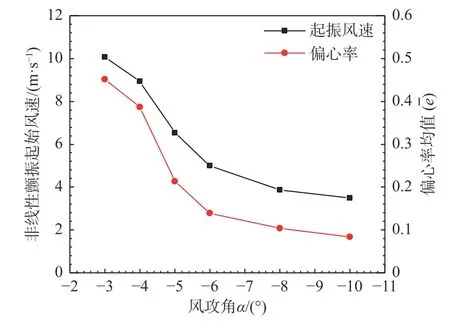
圖19 非線性顫振起始風速和對應偏心率均值隨風攻角變化Fig.19 Onset wind speed and corresponding mean eccentricity ratio variations with the wind attack angle in the nonlinear flutter
3 顫振非線性和振動分叉機理分析
線性顫振理論的前提是小振幅的振動,當結構發散后,微幅振動的前提也隨之消失。結構大振幅運動會帶來結構阻尼和氣動阻尼的非線性,系統的總阻尼為結構阻尼和氣動阻尼共同決定。根據軟顫振的位移時程和等效線性化的理論,可以將系統等效阻尼比表示為扭轉振幅的函數[4],并從系統等效阻尼比隨振幅變化規律的角度來解釋顫振非線性以及自限幅特性和分叉振動現象的機理。
3.1 系統等效阻尼比的識別方法
以α0=-5°,U*=7.33 為例說明系統阻尼比的識別方法。對于單自由度弱非線性系統,其形式如下:
利用平均法,可將其近似解寫成如下形式
振幅導數與振幅的商a′/a表示系統的對數衰減率。線性系統,其對數衰減率為常數,系統做e 指數衰減(發散)運動。
對于非線性系統,按照等效線性理論可將對數衰減率表示為振幅的函數,如下:
對兩邊進行積分后得:
對上式變換后得到對數振幅的表達式如下:
由于特征紊流等影響,其振幅可能具有波動性,對阻尼識別具有干擾性。因此可以采用式(11)來擬合振幅,擬合結果如圖20 所示。
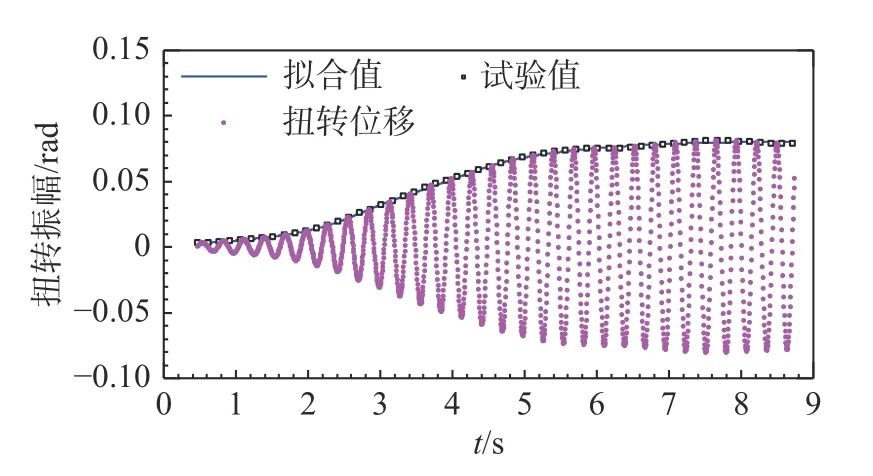
圖20 扭轉振幅擬合結果(α0=-5°,U?=7.33)Fig.20 Fitted result of the torsional amplitude(α0=-5°,U?=7.33)
對擬合后的振幅取對數,可以獲得其對數振幅。從圖21 可以看出,隨著振幅的增加,對數振幅的斜率由正變為0,表示系統阻尼比由負變為0。
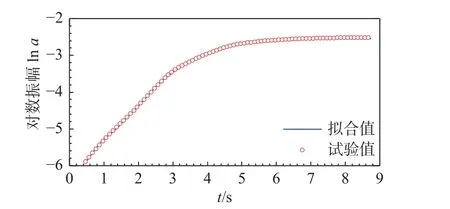
圖21 對數振幅擬合結果(α0=-5°,U?=7.33)Fig.21 Fitted result of the logarithmic amplitude(α0=-5°,U?=7.33)
多次識別GTS 時程和DTS 時程的阻尼比曲線,可以擬合得到系統阻尼比隨振幅變化關系(圖22)。從中可以看到,GTS 和DTS 的阻尼比曲線具有很好的一致性,在穩態振幅處,系統的阻尼比為0。
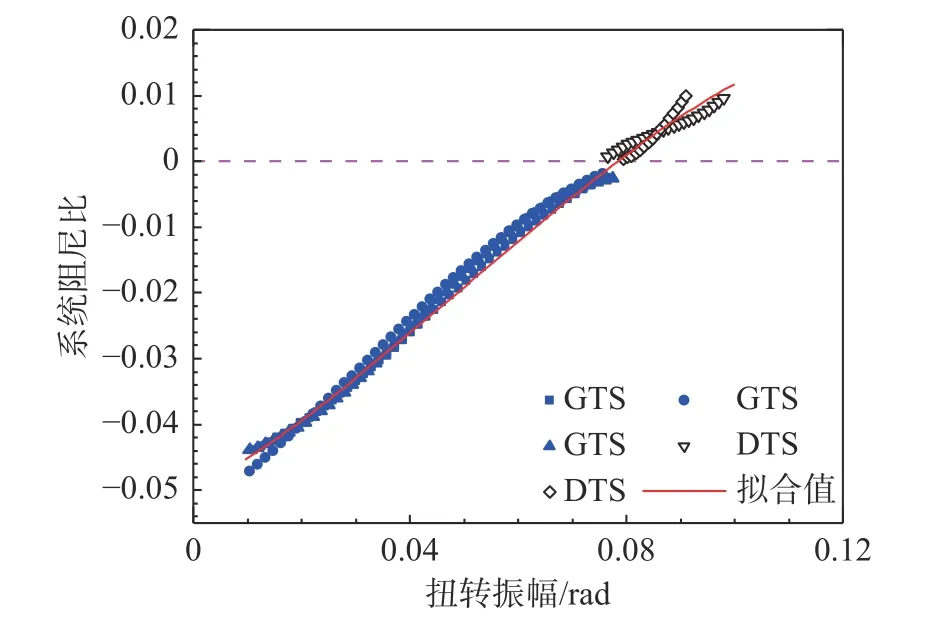
圖22 系統等效阻尼比擬合結果(α0=-5°,U?=7.33 )Fig.22 Fitted result of the system equivalent damping ratio(α0=-5,U?=7.33)
3.2 無振動分叉的非線性顫振
圖23 給出了攻角-5°時、無振動分叉的非線性顫振臨界風速后的三個典型折減風速(U*=6.79,7.33,7.89)下的系統等效阻尼比隨振幅的變化曲線。從圖中可見系統等效阻尼比是扭轉振幅的單增函數,系統等效阻尼比-振幅曲線有且只有一個零點。系統等效阻尼曲線的零點為系統的平衡點,在平衡點處,系統做極限環振蕩。由于圖23 中三條系統等效阻尼比—振幅曲線的斜率始終大于0,當振動向小振幅方向偏離時,負的系統等效阻尼比促使系統振動幅值重新增加,回到平衡點位置;反之,當振動向大振幅方向偏離時,正的系統等效阻尼比將促使系統振動幅值重新降低,回到平衡點位置。因此,該零點對應的是結構穩定平衡點。
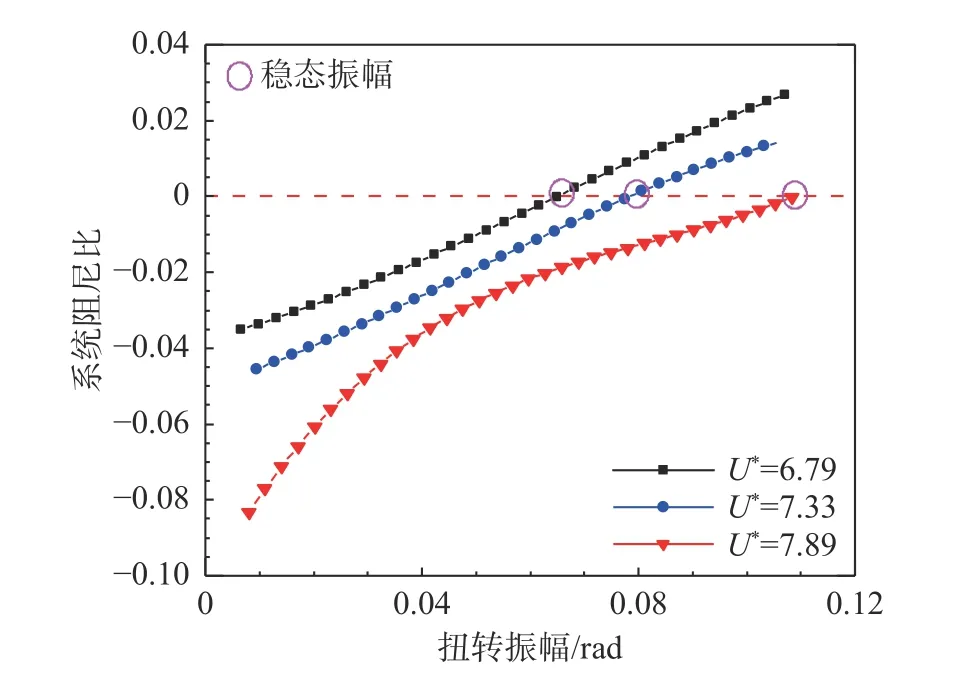
圖23 系統等效阻尼比隨扭轉振幅變化曲線(α0=-5°)Fig.23 System equivalent damping ratio variation with the torsional amplitude (α0=-5°)
從圖23 可見:在顫振初期,振幅較小,系統負等效阻尼比為絕對值較大,顫振幅值快速增加。隨著振幅增加,系統等效阻尼比絕對值不斷降低,幅值的增速逐漸變緩。當系統等效阻尼比最終達到0 時,顫振幅值不再發展,收斂于一個具有穩定振幅的極限環振動狀態。上述發展過程對應于圖5 中的GTS 過程。
當給予系統一個大于穩態振幅的初始激勵幅值時,系統等效阻尼比為正(見圖23),結構將做衰減振動。隨著振幅的減小,系統等效阻尼比隨之減小。當阻尼比降到0 時,系統振動收斂到一個具有穩定振幅的極限環振動。上述過程對應圖5 中的DTS。
隨著折減風速的增加,系統阻尼曲線整體朝負阻尼的方向下移,結構從發散到達穩態需要的時間也越來越短,而穩定動態平衡點也隨著風速增加而右移,即非線性顫振的穩態振幅隨折減風速的增加而增加。
3.3 有振動分叉的非線性顫振
圖24為攻角-4°、折減風速U*=8.75、9.04、9.53、9.80 條件下的系統等效阻尼比隨振幅的變化曲線。從圖中可見,隨著扭轉振幅的增加,4 個折減風速對應的系統等效阻尼比都經歷了先減小、再增加的演化過程。隨著折減風速的增加,系統阻尼曲線整體朝負阻尼的方向下移,零阻尼比對應的平衡點的個數依次為0、2、2 和1,小振幅處的系統等效阻尼比從正轉負,振動模式依次為發生顫振前的衰減振動、有振動分叉的非線性顫振和無振動分叉的非線性顫振。
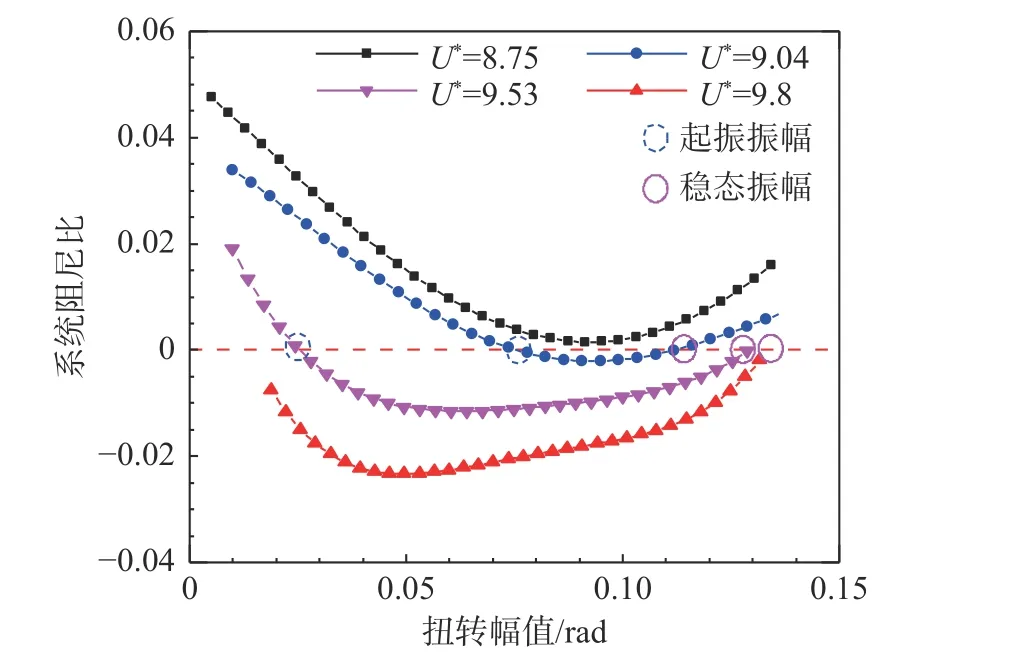
圖24 系統等效阻尼比隨扭轉振幅變化曲線(α0=-4°)Fig.24 System damping ratio variation with the torsional amplitude (α0=-4°)
當U*=8.75 時,試驗風速稍小于顫振起始(臨界)風速,系統阻尼比始終為正值,無論初始激勵多大,結構都將做自由衰減運動。當振幅為5.3°左右時,系統阻尼比達到最小且接近0,因此在大的初始激勵作用下,結構的衰減速率是先減小再增加,當振幅衰減到5.3°附近時,結構衰減非常緩慢(如圖9所示)。
當U*=9.04、9.53 時,在分叉振動區間內,系統存在兩個平衡點,并在平衡點處做極限環振動。在振幅較小的平衡點處,阻尼比曲線的斜率為負,該平衡點為不穩定平衡點。這是因為,當初始振幅朝小于起振振幅時,系統等效阻尼比為正,系統將進入衰減振動,直至到達靜態平衡位置(對應圖11 和圖13 的DTZ);而當初始振幅大于起振振幅(但仍小于穩態振幅)時,系統等效阻尼比為負,系統先發散、再做收斂于穩定振幅的極限環振動(對應圖11 和圖13 的GTS);只有當初始振動正好等于起振振幅時(在試驗中很難實現),系統將直接進入對應振幅的極限環振動狀態。
在第二個平衡點處,阻尼比曲線的斜率為正,意味著此平衡點是一個穩定平衡點。這是因為,當初始振幅小于穩態振幅(但仍大于起振振幅)時,等效阻尼比將小于0,系統先發散、再做收斂于穩定振幅的極限環振動(對應圖11 的GTS);而當初始振幅朝大于穩態振幅時,等效阻尼比將大于0,系統將先進入衰減振動狀態。隨著振幅的不斷減小,系統正等效阻尼比逐漸減小至0,系統最終做極限環振動(對應圖11的DTS)。
當U*=9.80 時,分叉振動區間后,系統等效阻尼比曲線只有一個曲線斜率為正的零點,對應穩定動態平衡點。在此之前,系統等效阻尼比均小于0。此時風速已經超過振動分叉區間上限,顫振的非線性特性與無振動分叉時相似。但是,在振動初期,兩者的阻尼非線性特性還是有明顯區別,前者的振幅發展速度也要快于后者。
從圖24 還可以看到,隨著風速增加,穩定平衡點右移,穩態振幅增加;不穩定平衡點向做移動,振動分叉的臨界激勵幅值降低。
3.4 結構非線性的影響
大振幅下的彈簧懸掛系統存在結構非線性,其中阻尼非線性比較明顯,其變化范圍為0.15%~1%,而剛度非線性較弱。因此,此處僅討論考慮阻尼非線性對試驗結果的影響。系統的總阻尼為結構阻尼和氣動阻尼共同決定,系統等效阻尼與結構阻尼之差即為氣動阻尼。圖25 和圖26 分別為攻角-5°和-4°工況下氣動阻尼比隨振幅變化曲線。將氣動阻尼曲線與圖23 和圖24 的總阻尼曲線對比來看,可知氣動阻尼和總阻尼隨振幅變化的趨勢相同,但氣動阻尼曲線相較于總阻尼曲線總體下移。
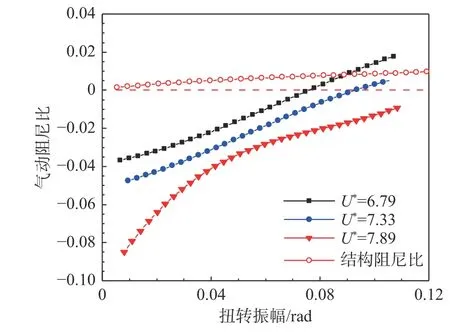
圖25 氣動阻尼比隨扭轉振幅變化(α0=-5°)Fig.25 Aerodynamic damping ratio variation with the torsional amplitude (α0=-5°)
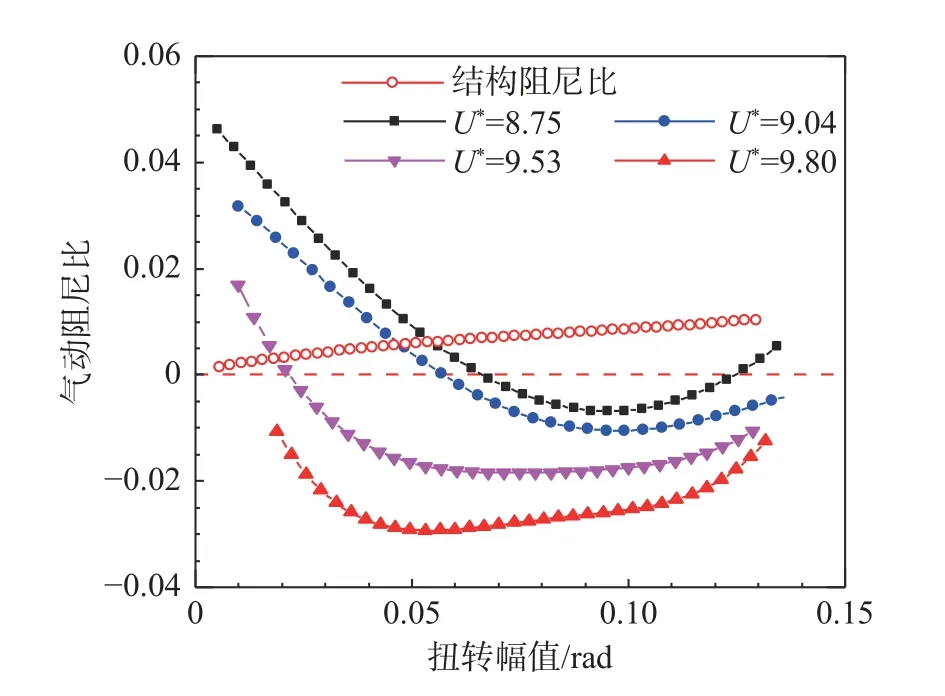
圖26 氣動阻尼比隨扭轉振幅變化曲線(α0=-4°)Fig.26 Aerodynamic damping ratio variation with the torsional amplitude (α0=-4°)
對于無振動分叉的非線性顫振,氣動阻尼曲線仍然只有一個零點。由于曲線下移,氣動阻尼曲線零點相對總阻尼曲線的零點會右移,即不考慮結構阻尼非線性,系統的穩態振幅將會增大,而小振幅處的結構阻尼本身較小,因此阻尼非線性對起振風速影響較小。
對于含振動分叉的非線性顫振,從趨勢上看,氣動阻尼曲線仍然會有兩個零點,而曲線下移將會使第一個零點左移、第二個零點右移,即起振振幅減小而穩態振幅增加,同時會降低分叉振動區間的起始風速。對于攻角-4°、折減風速為8.75 時的總阻尼曲線原本沒有零點,而其氣動阻尼曲線有兩個零點,說明忽略結構阻尼分叉振動會提前發生,只是小振幅處的結構阻尼本身較小,因此忽略結構阻尼對分叉振動區間的結束風速影響較小。
4 結論
本文通過節段模型風洞試驗對其中央開槽箱梁斷面在±10°大攻角范圍內的顫振性能進行研究,分析了非線性顫振隨等效風攻角(特別是負攻角)、折減風速等參數的變化,并基于系統阻尼比對顫振非線性特性和振動分叉現象的機理進行了分析闡述,主要結論如下:
1)該斷面在負的小攻角(-3°和-4°)發生有振動分叉的非線性顫振,在負的大攻角(-5°~-10°)發生無需初始激勵的無振動分叉非線性顫振,其余角度在試驗風速范圍發生線性顫振或者未發生顫振,顫振性能良好。
2)兩種非線性顫振均為彎扭耦合顫振。起振風速隨著風攻角的增加而減小,但在相同的折減風速下,大攻角下的彎扭耦合程度不低于小攻角下的彎扭耦合程度。在相同風攻角下,耦合程度、穩態振幅和分叉振動的起振振幅隨折減風速的增加而分別增強、增加和減小。
3)系統阻尼比隨扭轉振幅的變化規律能很好地反映非線性顫振發生機理和演變規律。在較小風攻角下,系統在小振幅處存在不穩定平衡點,并在大振幅處存在穩定平衡點,從而產生振動分叉現象。
采用系統阻尼比解釋顫振非線性特性和分叉振動現象仍屬于唯象學的范疇,如何從物理機制層面解釋線性和非線性氣動阻尼的產生機理及其隨風攻角和振幅的變化規律還有待進一步研究。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
西南交通大學學報(2016年4期)2016-06-15 20:29:37
