肋網(wǎng)式可展開拋物面天線的網(wǎng)面整體成形方法
2023-03-13 09:41:18吳明兒
載人航天 2023年1期
吳 迪 項(xiàng) 平 吳明兒
(同濟(jì)大學(xué)建筑工程系, 上海 200092)
1 引言
網(wǎng)狀拋物反射面可展開天線兼具較高的型面精度和收納比,被廣泛應(yīng)用于空間通訊。 其中,肋網(wǎng)式結(jié)構(gòu)體系是較為簡(jiǎn)單的一種,其反射面結(jié)構(gòu)主要由反射網(wǎng)面、肋、邊索和中心體組成。 體系中的唯一支承構(gòu)件是有一定剛度的肋,沒有背架和張力索網(wǎng)等輔助構(gòu)件。
根據(jù)收攏展開方式不同,肋網(wǎng)式體系可分為纏繞肋和折疊肋2 種構(gòu)型。 每種構(gòu)型中柔性反射網(wǎng)的運(yùn)動(dòng)與變形依賴于肋,將具有一定形狀和剛度的網(wǎng)面與肋可靠裝配并且保形,這是肋網(wǎng)式天線在設(shè)計(jì)、生產(chǎn)過程中極為重要的環(huán)節(jié)。
Lockheed 公司作為首個(gè)肋網(wǎng)式反射面天線的研制方對(duì)網(wǎng)面安裝進(jìn)行了詳盡的描述[1-4],將每2 根肋之間的網(wǎng)面視為一個(gè)獨(dú)立區(qū)域,預(yù)先考慮張拉變形,打印出網(wǎng)面變形前形狀的模板,按照模板逐片裁剪,并通過縫制法與肋連接,其成果已應(yīng)用于ATS-6 衛(wèi)星9.1 m 口徑纏繞肋天線和為百米系統(tǒng)(100-meter Full-scale System)預(yù)研的55 m 口徑樣機(jī)等。
肋網(wǎng)式天線的反射面型面以多個(gè)小的逼近面實(shí)現(xiàn)對(duì)設(shè)計(jì)拋物面的近似,常采用一些輔助構(gòu)件和輔助方法[5-6]實(shí)現(xiàn)網(wǎng)面的高精度成形,如在肋上布置高度調(diào)節(jié)器,實(shí)現(xiàn)對(duì)扇區(qū)網(wǎng)面進(jìn)一步精細(xì)劃分的輔助牽引面法;在主肋之間增加小尺寸輔助肋,并布置拉繩的輔助肋方法;在網(wǎng)面下方布置張力索網(wǎng)的方法等。 嫦娥4 號(hào)中繼星傘狀天線即采用徑向肋下布置張力索網(wǎng)的辦法實(shí)現(xiàn)了高精度、高可靠性的天線設(shè)計(jì)[7]。
反射網(wǎng)面型面精度是網(wǎng)面在結(jié)構(gòu)層面的重要指標(biāo),一般以和理想面的型面誤差RMS量化描述。 通常要求RMS小于反射波長的1/20,若小于1/30 更佳。 肋的數(shù)量和網(wǎng)面成形后的徑向周向應(yīng)力比直接影響了理論精度[8-9],增加肋數(shù)和高占比的周向應(yīng)力對(duì)型面精度更有利,設(shè)計(jì)時(shí)需根據(jù)結(jié)構(gòu)質(zhì)量、可靠性等指標(biāo)綜合考慮其取值。 對(duì)于經(jīng)找形分析等得到的設(shè)計(jì)反射面,通過網(wǎng)面裁剪、拼接和成形可滿足設(shè)計(jì)要求。 由于網(wǎng)面的裁剪與安裝涉及高精度天線研制的關(guān)鍵技術(shù),有關(guān)成形工藝分析與研究的公開資料大多以專利或綜述的形式[2-4,10-12]發(fā)布。
現(xiàn)有的網(wǎng)面裁剪和成形工藝一般都比較復(fù)雜,適用于大口徑天線的網(wǎng)面安裝,難以應(yīng)用于中小口徑天線。 本文研究了一種適用于中小口徑肋網(wǎng)式可展開拋物面天線的反射網(wǎng)面整體成形方法。 該方法中,平面網(wǎng)面或圓臺(tái)面網(wǎng)面通過直接張拉并縫制于天線肋上,實(shí)現(xiàn)反射面的成形與安裝,網(wǎng)面裁剪與拼接少,安裝更加簡(jiǎn)潔高效。 本文給出其詳細(xì)步驟,分析了可操作性,并通過數(shù)值計(jì)算考察了成形后反射面的型面精度及網(wǎng)面張力,進(jìn)行了3 m 口徑纏繞肋天線原理樣機(jī)的反射網(wǎng)面整體成形試驗(yàn),并測(cè)量了其型面誤差。
2 網(wǎng)面整體成形方法
網(wǎng)面整體成形方法以裁剪得到的一整片平面網(wǎng)面為初始狀態(tài),在張拉前為可展面,通過拉伸實(shí)現(xiàn)整體張拉成形。 該方法不需對(duì)網(wǎng)面做二次分割,可減少手工操作和額外的張拉固定裝置。
對(duì)于口徑較小、焦徑比較大的反射面,可以直接由平面網(wǎng)面張拉整體成形;對(duì)于口徑較大、焦徑比較小的反射面,可以預(yù)先拼接成圓臺(tái)面網(wǎng)面,再張拉整體成形。 在具體應(yīng)用時(shí),應(yīng)綜合考慮設(shè)計(jì)目標(biāo)、天線尺寸、拓?fù)錁?gòu)型和網(wǎng)面材性等因素,以確定所采用的整體成形方法形式。
2.1 平面網(wǎng)面張拉整體成形方法
平面網(wǎng)面直接張拉整體成形方法的步驟如下(圖1):
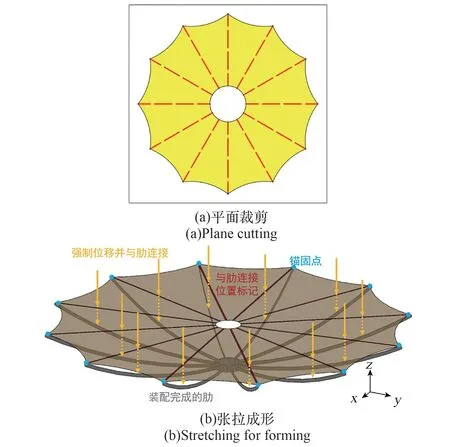
圖1 平面網(wǎng)面張拉整體成形Fig.1 Mesh assembly by entirely stretching from plane
1)考慮反射面邊界形狀及拋物面中心可能沒有反射網(wǎng)面,將反射網(wǎng)按天線拋物反射面的投影形狀進(jìn)行平面裁剪,在與肋的投影位置對(duì)應(yīng)的網(wǎng)面處做標(biāo)記線,作為后續(xù)與肋的連接位置;
2)將裁剪完成的平面網(wǎng)面平鋪于已裝配完成的肋骨架上,將網(wǎng)面均勻壓向肋,沿標(biāo)記線將網(wǎng)面縫制于肋之上,并進(jìn)行邊索安裝及鎖邊等,完成網(wǎng)面成形。
通過強(qiáng)制拉伸網(wǎng)面實(shí)現(xiàn)對(duì)其的張力賦予,且張拉與固定操作同步進(jìn)行。 網(wǎng)面徑向尺寸從天線半徑被拉伸到肋的弧長,以拉伸的位移量替代張拉的力值作為指標(biāo),從而無需在張拉過程中監(jiān)測(cè)力值,降低了操作難度。 當(dāng)網(wǎng)面材料幅寬足夠時(shí),裁剪中不需要拼接,大大減少了裁剪拼接操作,節(jié)省了網(wǎng)面材料。
當(dāng)肋非徑向布置,或者需要調(diào)整反射面張力時(shí),可靈活調(diào)整標(biāo)記線位置或平面裁剪尺寸,使其滿足設(shè)計(jì)要求(圖2)。
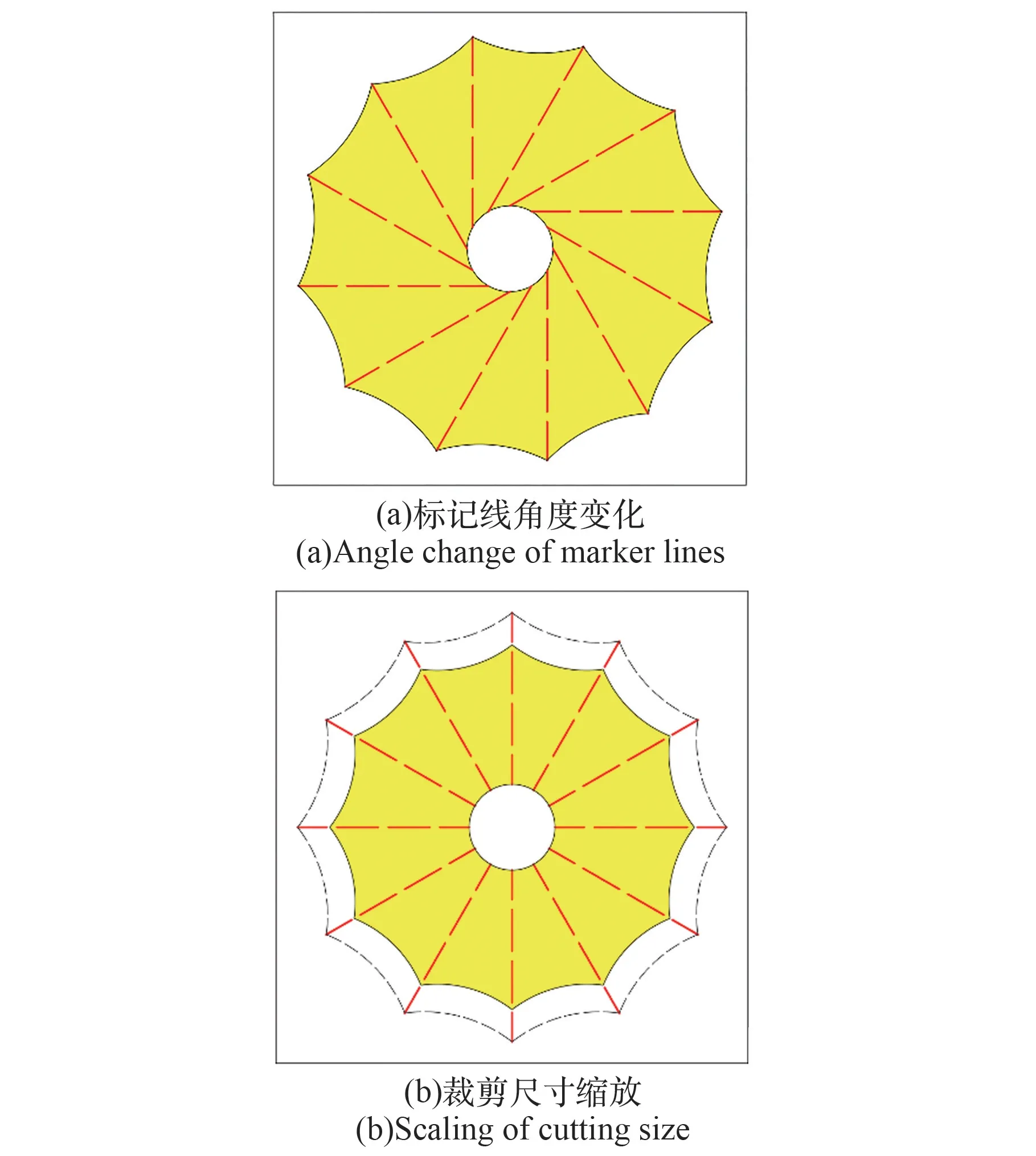
圖2 平面裁剪片標(biāo)記線與尺寸的調(diào)整Fig.2 Adjustment of marker lines and size of plane cutting piece
2.2 圓臺(tái)面網(wǎng)面張拉整體成形方法
當(dāng)天線口徑較大、焦徑比較小時(shí),采用平面網(wǎng)面直接張拉會(huì)使網(wǎng)面張力過大,超過材料容許工作張力,此時(shí)可采用與反射面形狀更接近的圓臺(tái)面網(wǎng)面進(jìn)行張拉,網(wǎng)面徑向尺寸從肋的弦長被拉伸到肋的弧長,相較于從平面張拉減少了應(yīng)變。圓臺(tái)面為可展曲面,可以采用平面裁剪進(jìn)行拼接。圓臺(tái)面網(wǎng)面張拉整體成形的步驟如下(圖3):
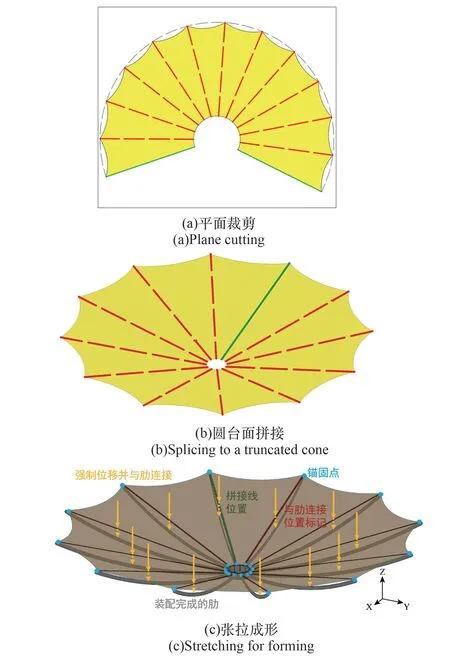
圖3 圓臺(tái)面網(wǎng)面張拉整體成形Fig.3 Mesh assembly by entirely stretching from truncated cone
1)考慮邊界形狀等對(duì)反射網(wǎng)進(jìn)行平面裁剪,形成扇形網(wǎng)面。 當(dāng)網(wǎng)面材料幅寬不足時(shí),可裁剪形成多個(gè)扇面進(jìn)行拼接。 在網(wǎng)面上標(biāo)記與肋的連接線位置;
2)將扇形網(wǎng)面拼接形成為空間的圓臺(tái)面;
3)將拼接完成的圓臺(tái)面網(wǎng)面平鋪于已裝配完成的肋骨架上,將網(wǎng)面均勻壓向肋,沿標(biāo)記線將網(wǎng)面縫制于肋之上,并進(jìn)行邊索安裝及鎖邊等,完成網(wǎng)面成形。
通過設(shè)定網(wǎng)面裁剪片尺寸,即扇形中心角及半徑,可得到不同高度及底半徑的臺(tái)面(圖4)。由此可以調(diào)整最終整體成形后反射面的形狀與網(wǎng)面張力。 確定網(wǎng)面裁剪尺寸時(shí)要綜合考慮成形網(wǎng)面型面精度和各個(gè)位置2 個(gè)方向(徑向和周向)上的張力。
3 網(wǎng)面整體成形的有限元仿真
網(wǎng)面成形是具有彈性邊界(肋)的索網(wǎng)結(jié)構(gòu)的靜力平衡問題,可使用有限元方法進(jìn)行網(wǎng)面成形過程的仿真。 雖然肋相比于網(wǎng)面剛度大得多,但是在網(wǎng)面被張拉并與肋固定后成為一個(gè)整體,懸臂布置的肋會(huì)發(fā)生彈性變形,偏離原裝配位置,共同變形后的網(wǎng)面形狀才是反射面工作狀態(tài)的形狀。
3.1 平面網(wǎng)面整體成形仿真
纏繞肋可展開天線算例參數(shù)如下:天線口徑為0.5 m,焦徑比為0.45,肋16 根,肋和中心體法線夾角為80°。 索力設(shè)為0.8 N,肋為不銹鋼C 形截面,軸線形狀為拋物線形,反射網(wǎng)為金屬織物網(wǎng),在計(jì)算中假設(shè)為各向同性材料。 計(jì)算中采用的材料以及截面的參數(shù)見表1。
表1 平面成形有限元仿真參數(shù)Table 1 FEM simulation parameters of stretching from plane
平面網(wǎng)面整體成形的有限元仿真過程如下:①按裁剪形狀建立有限元模型,包括肋、網(wǎng)面和邊索,其中肋按投影直線形狀布置在網(wǎng)面的相應(yīng)位置,網(wǎng)面和邊索使用真實(shí)彈性模量,肋使用虛擬小彈性模量;②對(duì)肋施加強(qiáng)制位移,使肋沿長度方向均勻變形為其設(shè)計(jì)形狀,網(wǎng)面隨之拉伸而張拉,計(jì)算完成后清除肋的應(yīng)力,保留其他網(wǎng)面及邊索的應(yīng)力;③恢復(fù)肋的真實(shí)彈性模量,解除強(qiáng)制位移點(diǎn)的約束,給邊索施加設(shè)計(jì)預(yù)張力,計(jì)算得到肋變形、網(wǎng)面應(yīng)力以及反射面形狀。
有限元仿真中的肋嵌于網(wǎng)面內(nèi),隨網(wǎng)面一起發(fā)生大變形,通過對(duì)肋剛度的調(diào)節(jié)模擬肋與網(wǎng)面形成的整體結(jié)構(gòu)及后續(xù)的變形,簡(jiǎn)化了分析流程。采用與口徑0.5 m 相同的直徑裁剪平面網(wǎng)面,網(wǎng)面邊界圓弧垂跨比為1/10,進(jìn)行整體成形分析。成形后的反射面張力云圖見圖5,反射面型面與設(shè)計(jì)拋物面在z向(開口方向)的位置偏移量大小分布見圖6。
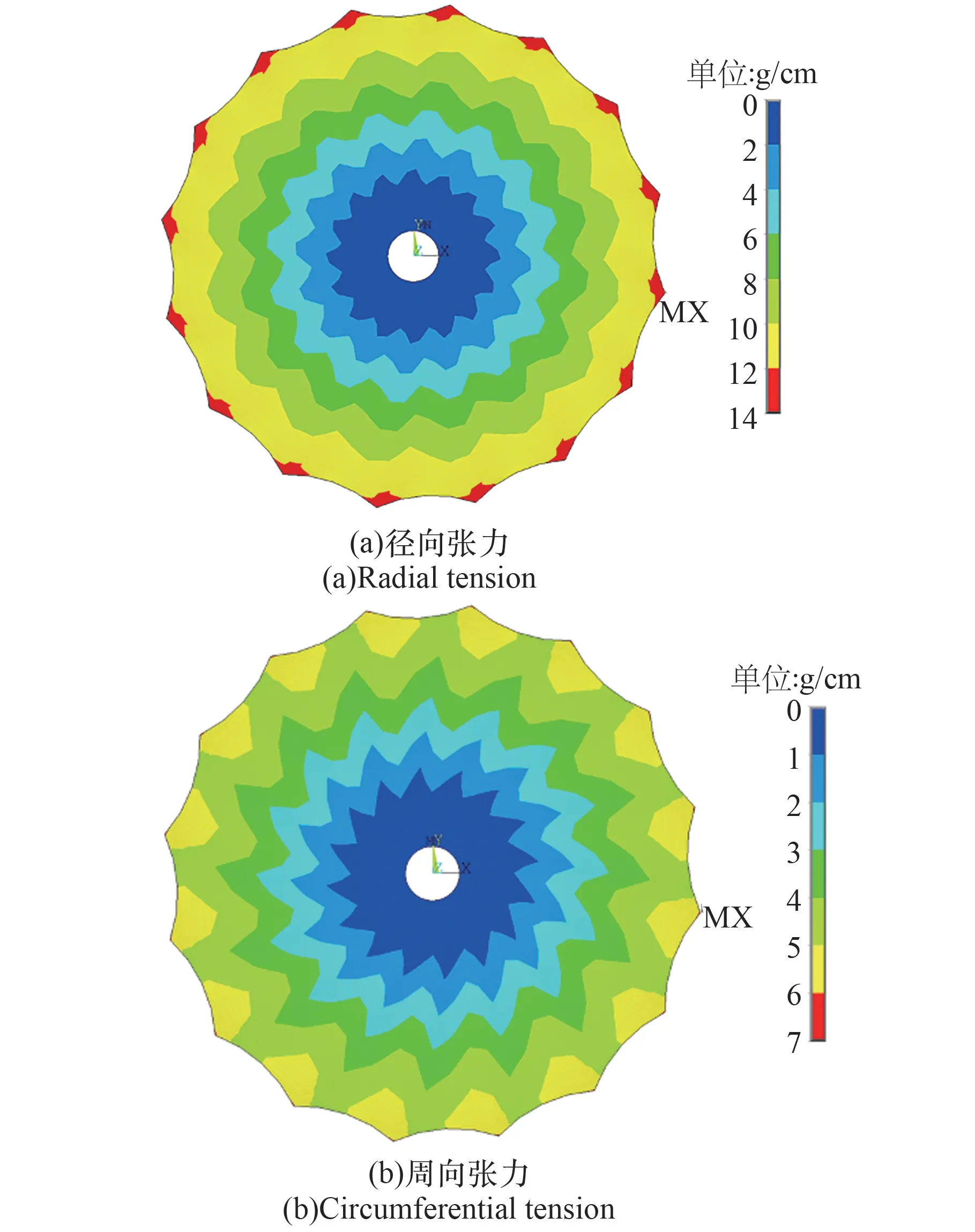
圖5 平面成形的網(wǎng)面張力分布Fig.5 Mesh tension from plane stretching
網(wǎng)面張力呈現(xiàn)出由內(nèi)而外逐漸變大的趨勢(shì),大部分區(qū)域的徑向張力在4 ~10 g/cm 范圍內(nèi),部分區(qū)域張力超出了選用網(wǎng)面材料的推薦工作張力,周向張力在2~5 g/cm 范圍內(nèi),徑向與環(huán)向張力比約為2 ∶1。
成形網(wǎng)面和設(shè)計(jì)拋物面的z向偏移量在-2.60~2.29 mm 范圍內(nèi)。 網(wǎng)面在肋附近低于設(shè)計(jì)拋物面,在相鄰肋之間高于設(shè)計(jì)拋物面,形成了曲率和肋形狀相反的凸包,即雙向張拉下出現(xiàn)的反枕現(xiàn)象。
本算例中,經(jīng)平面網(wǎng)面整體成形得到的網(wǎng)面與設(shè)計(jì)拋物面的型面誤差RMS=1.00 mm,可滿足一般X 波段拋物反射面天線對(duì)型面精度的要求。
3.2 圓臺(tái)面網(wǎng)面整體成形仿真
圓臺(tái)面網(wǎng)面整體成形分析方法與3.1 節(jié)平面網(wǎng)面整體成形分析方法基本一致。
纏繞肋可展開天線算例參數(shù)如下:天線口徑為3 m,焦徑比為0.56,肋36 根,肋和中心體法線夾角為0°。 邊索張力、索及反射網(wǎng)材料參數(shù)與3.1 節(jié)相同。 肋采用碳纖維復(fù)合材料,在計(jì)算中假設(shè)為各向同性材料,軸線形狀為拋物線形,截面為豆莢形。 計(jì)算中肋的材料以及截面的等效參數(shù)取值見表2。
表2 碳纖維復(fù)合材料肋有限元仿真參數(shù)Table 2 Parameters of CFRP ribs in FEM simulation
以口徑為3 m,焦徑比為0.56 的設(shè)計(jì)拋物面為基準(zhǔn),為使網(wǎng)面張力小于最大推薦工作張力6 g/cm,設(shè)定用于整體成形的圓臺(tái)尺寸為:與設(shè)計(jì)拋物面相比,圓臺(tái)上底直徑不做縮放,取值為250 mm;下底直徑減小20 mm,取值為2980 mm;臺(tái)高減少4 mm,取值為325.18 mm,網(wǎng)面邊界圓弧垂跨比為1/10。 整體成形分析后得到的反射面張力云圖見圖7,反射面型面與設(shè)計(jì)拋物面在z向(開口方向)的位置偏移量大小分布見圖8。

圖7 圓臺(tái)面成形的網(wǎng)面張力分布Fig.7 Mesh tension from truncated cone stretching
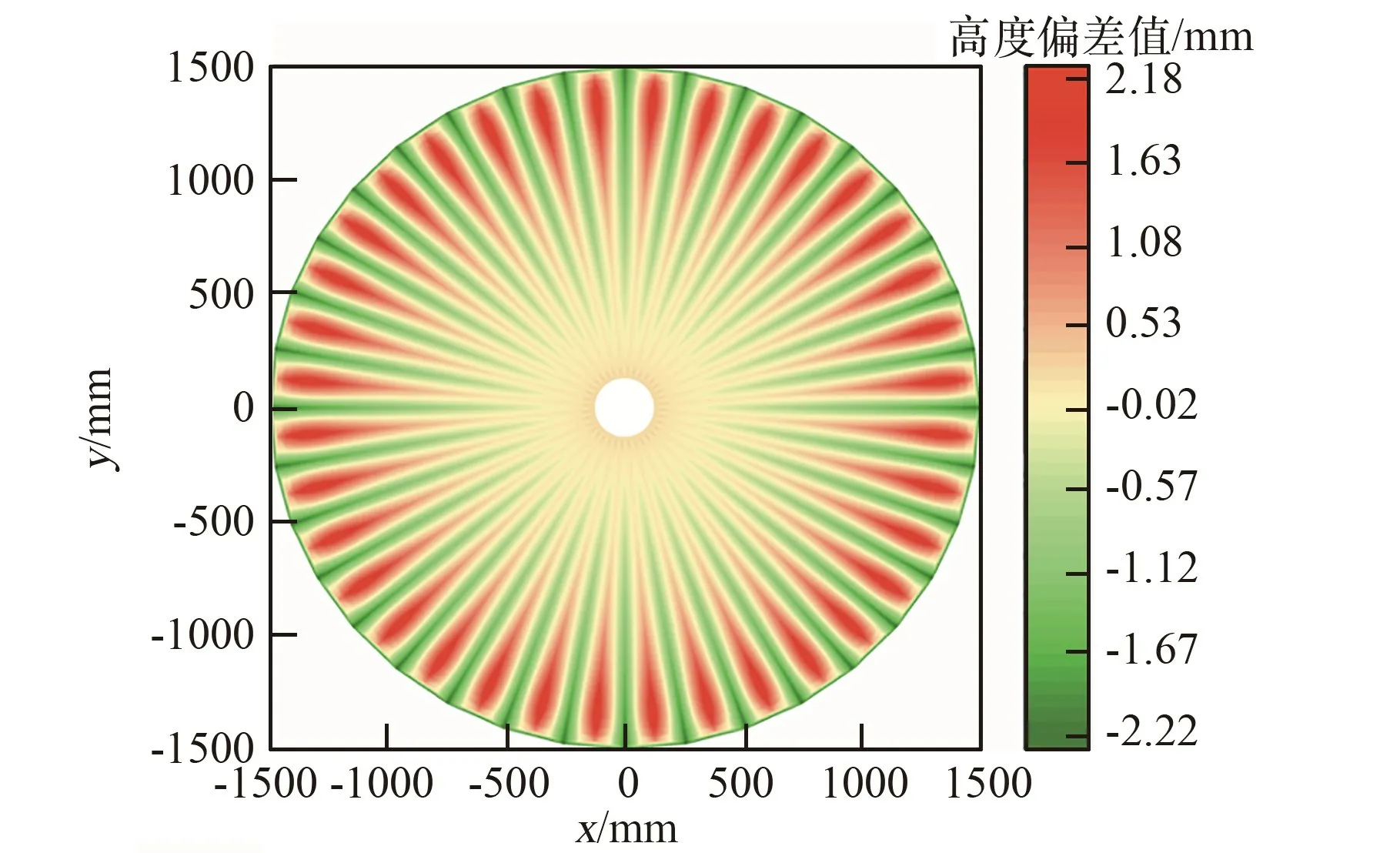
圖8 圓臺(tái)面成形的型面高度偏差分布Fig.8 Surface z-direction deviation from truncated cone stretching
網(wǎng)面張力整體呈現(xiàn)出中間大內(nèi)外端小的趨勢(shì)。 網(wǎng)面大部分區(qū)域徑向和周向張力均在2~5 g/cm 范圍內(nèi),只有局部邊界處的周向張力小于2 g/cm,網(wǎng)面張力均處于選用網(wǎng)面材料的推薦工作張力范圍內(nèi),徑向與環(huán)向張力比約為1 ∶1。
成形網(wǎng)面和設(shè)計(jì)拋物面的z向偏移量在-2.22~2.18 mm 范圍內(nèi)。 網(wǎng)面在肋附近低于設(shè)計(jì)拋物面,在相鄰肋之間高于設(shè)計(jì)拋物面,形成了曲率和肋形狀相反的凸包,即雙向張拉下出現(xiàn)的反枕現(xiàn)象。
本算例中,經(jīng)圓臺(tái)面網(wǎng)面整體成形得到的網(wǎng)面與設(shè)計(jì)拋物面的型面誤差RMS=0.77 mm,也可滿足一般X 波段拋物反射面天線對(duì)型面精度的要求。 相較于平面成形算例,初始形狀為圓臺(tái)面的網(wǎng)面更接近于設(shè)計(jì)拋物面,成形過程中網(wǎng)面的變形量更小,網(wǎng)面張力水平更低且較為均勻。
4 網(wǎng)面整體成形試驗(yàn)
4.1 網(wǎng)面整體成形
研制了一臺(tái)口徑為3 m,焦徑比為0.56 的纏繞肋可展開天線原理樣機(jī),設(shè)計(jì)指標(biāo)型面誤差RMS<1.00 mm。 根據(jù)型面精度要求、反射網(wǎng)面工作張力范圍、結(jié)構(gòu)質(zhì)量和空間布置等因素,綜合確定反射面支承采用36 根碳纖維復(fù)合材料豆莢形截面肋,按圓臺(tái)面網(wǎng)面整體成形方法完成反射面的張拉成形。 原理樣機(jī)相關(guān)參數(shù)和圓臺(tái)面網(wǎng)面尺寸與3.2 節(jié)有限元算例一致。
反射面成形主要包括以下3 個(gè)步驟(圖9):

圖9 網(wǎng)面整體成形過程Fig.9 Entire assembly process of reflector
1)按圓臺(tái)面尺寸進(jìn)行網(wǎng)面的平面展開,根據(jù)金屬網(wǎng)幅寬,將平面網(wǎng)面分成2 片進(jìn)行拼接,形成圓臺(tái)面網(wǎng)面;
2)設(shè)置工裝和游標(biāo)高度尺,對(duì)36 根肋進(jìn)行定位,對(duì)肋進(jìn)行重力補(bǔ)償并固定,使重力場(chǎng)下肋的外端部處于無重力狀態(tài)下的位置;
3)將圓臺(tái)形網(wǎng)面張拉并固定于肋上,張拉邊索并固定,拆除工裝,網(wǎng)面成形完成。
4.2 反射面型面精度測(cè)量
安裝完成的網(wǎng)面處于張緊狀態(tài),經(jīng)多次重復(fù)收攏展開后,網(wǎng)面依然平整光滑并保持張拉力。
對(duì)安裝完成的天線反射面采用非接觸式三維光學(xué)測(cè)量方法獲取其反射面網(wǎng)面形狀。 測(cè)量設(shè)備包含靶點(diǎn)、編碼點(diǎn)、基準(zhǔn)尺、相機(jī)和后處理軟件等。在測(cè)量時(shí),首先在網(wǎng)面上均勻布置靶點(diǎn),在測(cè)量環(huán)境中布置編碼點(diǎn)和基準(zhǔn)尺,靶點(diǎn)布置如圖10 所示。 使用相機(jī)對(duì)結(jié)構(gòu)和環(huán)境進(jìn)行多位置拍攝,將照片組導(dǎo)入后處理軟件進(jìn)行散點(diǎn)式的形狀三維重建,見圖11 所示。
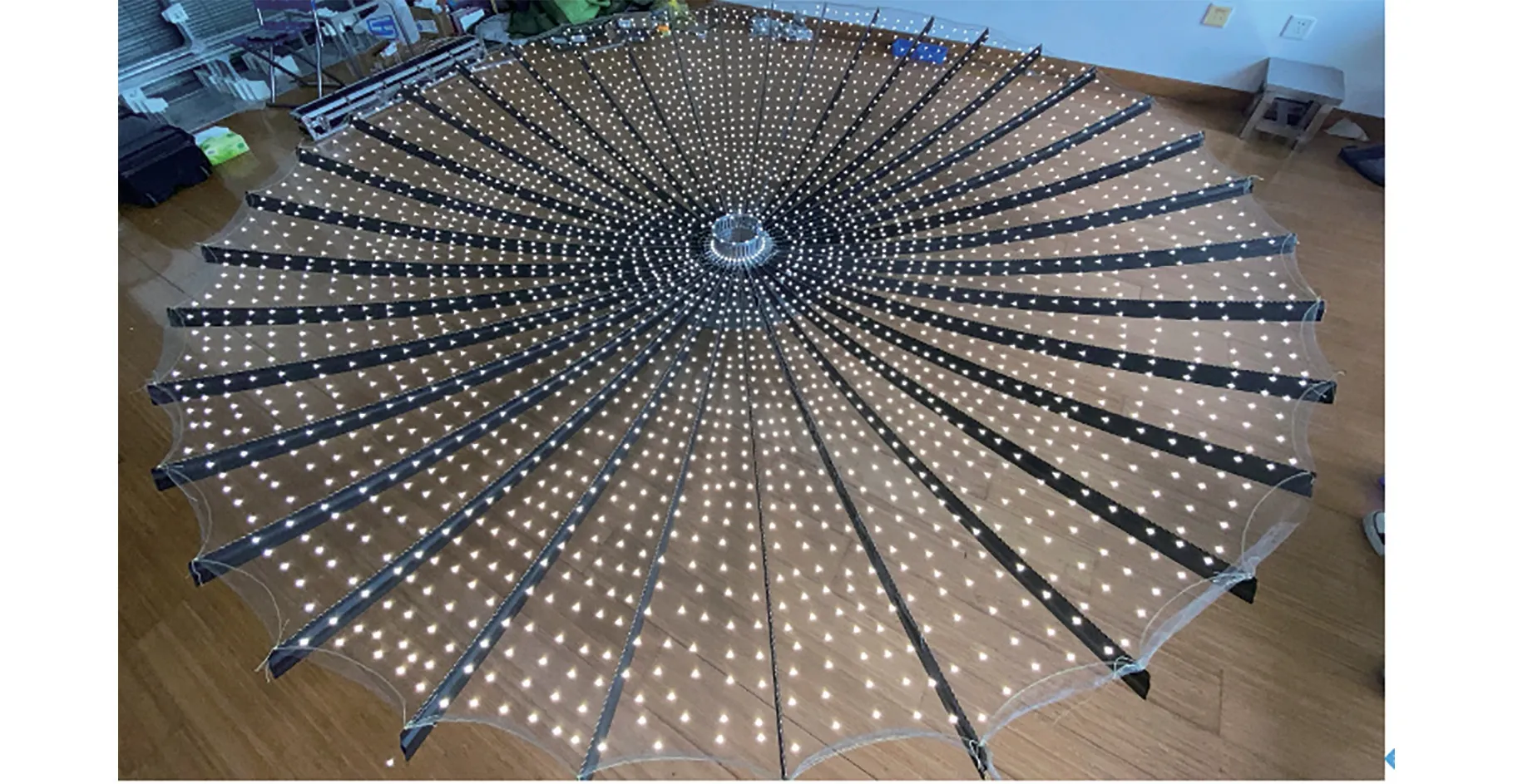
圖10 網(wǎng)面形狀攝影測(cè)量的靶點(diǎn)布置Fig.10 Target points layout of mesh shape in photogrammetry
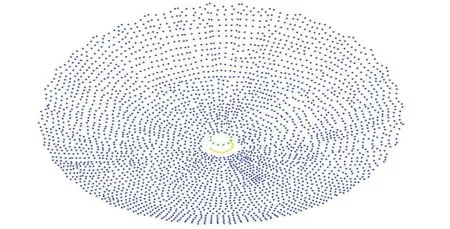
圖11 網(wǎng)面散點(diǎn)三維重建Fig.11 3D reconstruction of mesh scatter
利用測(cè)量得到的全部散點(diǎn)三維坐標(biāo),擬合出一個(gè)與設(shè)計(jì)拋物面具有相同軸線的擬合拋物面。該擬合拋物面的焦距與設(shè)計(jì)拋物面的焦距可能存在一定的微小誤差,該誤差可通過調(diào)節(jié)饋源位置消除。 將饋源置于擬合拋物面的焦點(diǎn)處,實(shí)現(xiàn)結(jié)構(gòu)功能。 本文在計(jì)算原理樣機(jī)反射面的型面誤差RMS時(shí),以其擬合拋物面作為計(jì)算基準(zhǔn)。 在計(jì)算時(shí),光學(xué)測(cè)量所捕捉靶點(diǎn)的z坐標(biāo)值為觀測(cè)值;擬合拋物面上相應(yīng)點(diǎn)(具有相同的x,y坐標(biāo))的z坐標(biāo)值為真值;觀測(cè)次數(shù)為靶點(diǎn)數(shù)目。 得到的觀測(cè)值和真值差值的RMS值即為型面誤差RMS。
按以上方法,得到安裝完成且未經(jīng)收攏展開的天線樣機(jī)反射面與擬合拋物面的型面誤差RMS= 0.82 mm, 經(jīng)一次收攏展開后RMS=0.79 mm, 與 3.2 節(jié)中有限元計(jì)算結(jié)果(0.77 mm)基本吻合。
5 結(jié)論
本文研究了一種適用于中小口徑肋網(wǎng)式可展開拋物面天線的反射網(wǎng)面整體成形方法,該方法已應(yīng)用于X 波段0.5 m 口徑纏繞肋天線[13],并已成功在軌展開運(yùn)行。
1)給出了反射網(wǎng)面整體成形方法的詳細(xì)操作步驟,可根據(jù)天線口徑、焦徑比、肋的布置方向和反射網(wǎng)面材性等靈活選擇網(wǎng)面裁剪形式。 整體成形方法相較于現(xiàn)有的適用于大口徑天線的網(wǎng)面成形工藝,具有拼接少、操作簡(jiǎn)單和節(jié)省網(wǎng)面材料的優(yōu)勢(shì)。
2)對(duì)網(wǎng)面整體成形方法進(jìn)行有限元仿真分析,分析反射面網(wǎng)面不同裁剪形狀下的成形精度和張力。 有限元計(jì)算結(jié)果表明,0.5 m 口徑和3 m 口徑的纏繞肋天線可分別采用平面網(wǎng)面和圓臺(tái)面網(wǎng)面進(jìn)行整體成形,成形后型面誤差RMS≤1.0 mm。
3)研制了一臺(tái)口徑為3 m,焦徑比為0.56,由36 根碳纖維復(fù)合材料豆莢形截面肋組成的纏繞肋可展開天線原理樣機(jī),采用圓臺(tái)面網(wǎng)面整體成形方法進(jìn)行了反射面成形。 成形后反射網(wǎng)面光滑平整張緊,測(cè)量得到反射面型面誤差RMS約為0.8 mm。