
橋、門式起重機起升高度限位器的配置
2023-03-16 11:09:08蔣元棟
中國特種設備安全 2023年2期
李 威 黃 斌 蔣元棟
(江蘇省特種設備安全監督檢驗研究院蘇州分院 蘇州 215031)
起升高度限位器是防止起重機械起升機構取物裝置沖頂的重要安全保護裝置,其功能可靠與否將直接影響起重機械的安全運行。根據近年來特種設備事故統計和原因分析,在橋、門式起重機使用過程中,由于起升高度限位器配置不當、缺失、損壞和失效等原因引起的事故占比較高。為此,國家市場監督管理總局辦公廳于2021年3月10日下發了《市場監管總局辦公廳關于開展起重機械隱患排查治理工作的通知》(市監特設發〔2021〕16號,以下簡稱16號文)[1]。按照16號文要求,對于未配置傳動式起升高度限位器的橋、門式起重機,應按時間節點要求再安裝(加裝)(以下統稱加裝)一套不同于原配置形式的起升高度限位器,以確保滿足“雙限位”裝置的要求,達到提高設備本質安全之目的。以下筆者就常見的起升高度限位器形式、工作原理等,并結合工作中的實際問題談一下對配置起升高度限位器的理解。
1 起升高度限位器的形式及其工作原理
1.1 傳動式起升高度限位器
傳動,即機械之間的動力傳遞。所謂起重機械的傳動式起升高度限位器,首先,此類限位器內部為機械傳動形式,通常有螺桿螺母傳動式、蝸輪蝸桿傳動式及齒輪傳動式等。其次,限位器的傳動端部件(如螺桿、蝸桿或傳動軸等)與起重機起升機構的某一旋轉部件(如卷筒軸等)之間通過聯軸器、套裝等方式直接剛性連接或通過齒輪、鏈輪鏈條傳動機構等方式間接柔性連接,以此實現動力傳遞。下面簡單介紹幾種常見的鋼絲繩卷揚式起升機構的傳動式起升高度限位器。
●1.1.1 螺桿螺母傳動式起升高度限位器
螺桿螺母傳動式起升高度限位器(以下簡稱螺桿螺母式限位器)安裝及構造圖,見圖1。
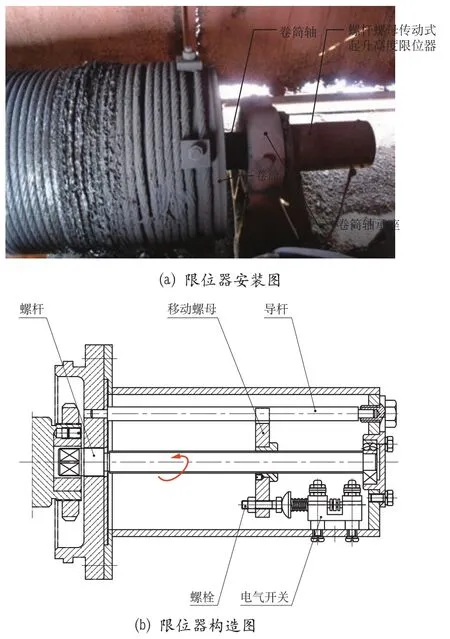
圖1 螺桿螺母傳動式起升高度限位器
該限位器的內部為螺桿螺母傳動形式,螺桿與卷筒軸之間套裝連接以始終實現卷筒與限位器之間的動力傳遞。具體工作原理分析如下:
當起升機構上升運行時,其卷筒軸帶動螺桿螺母式限位器的螺桿并按圖1(b)中的紅色箭頭方向轉動,于是限位器的移動螺母在導桿的約束作用下向右側移動。當吊具(如吊鉤、抓斗等)到達上升極限位置時,固定在移動螺母上的螺栓碰觸電氣開關,于是電氣開關動作并切斷上升方向動力源,促使起升機構停止上升運行。
●1.1.2 蝸輪蝸桿傳動式起升高度限位器
蝸輪蝸桿傳動式起升高度限位器(以下簡稱蝸輪蝸桿式限位器)安裝及構造圖,見圖2。
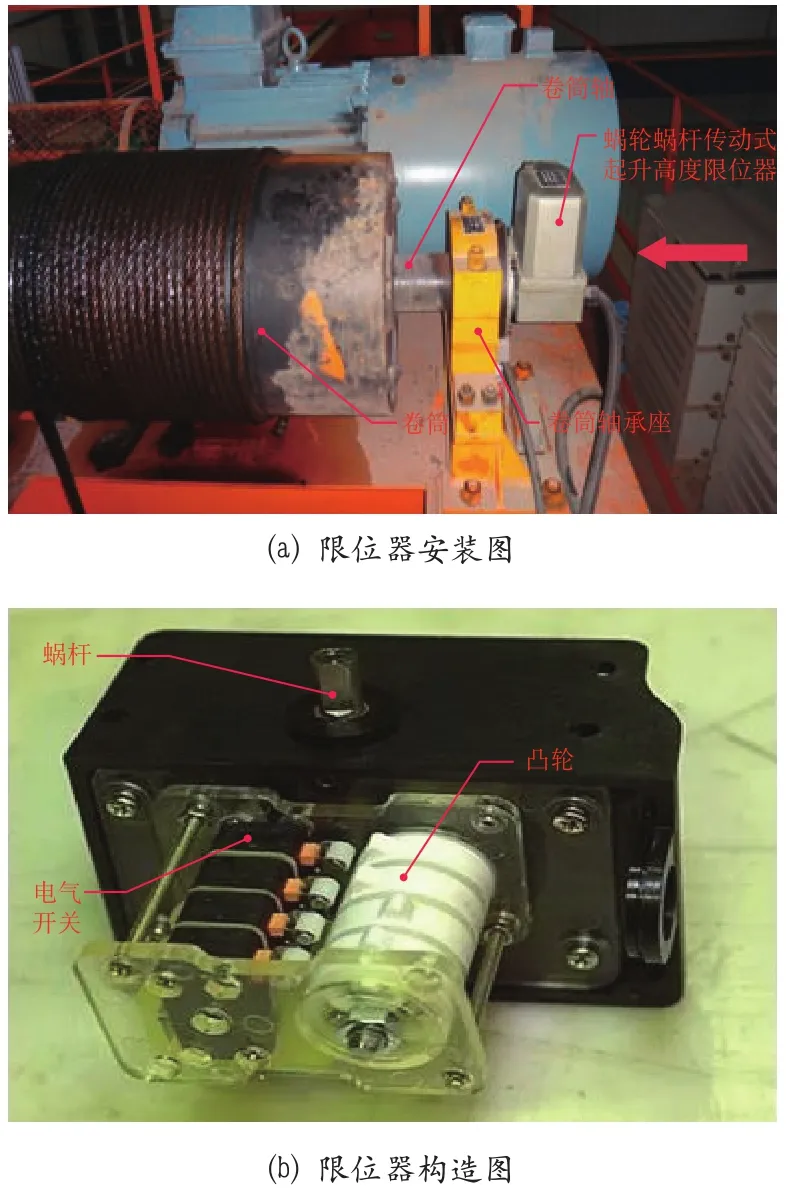
圖2 蝸輪蝸桿傳動式起升高度限位器
該限位器的內部為蝸輪蝸桿傳動形式,蝸桿與卷筒軸之間套裝連接以始終實現卷筒與限位器之間的動力傳遞。具體工作原理分析如下:
當起升機構上升運行時,其卷筒軸以一定方向(從圖2(a)中紅色箭頭方向看為順時針)轉動并帶動蝸輪蝸桿式限位器的蝸桿轉動,這時限位器的蝸輪蝸桿機構按一定速比傳動運轉,同時蝸輪(在限位器內部)轉動并帶動蝸輪軸上的凸輪轉動。當吊具到達上升極限位置時,凸輪碰觸電氣開關(圖中4個電氣開關,一般情況下2個控制上升方向,另外2個控制下降方向,具體按圖設計接線),于是電氣開關動作并切斷上升方向動力源,促使起升機構停止上升運行。
●1.1.3 齒輪傳動式起升高度限位器
齒輪傳動式起升高度限位器(以下簡稱齒輪傳動式限位器)外形及構造圖,見圖3。
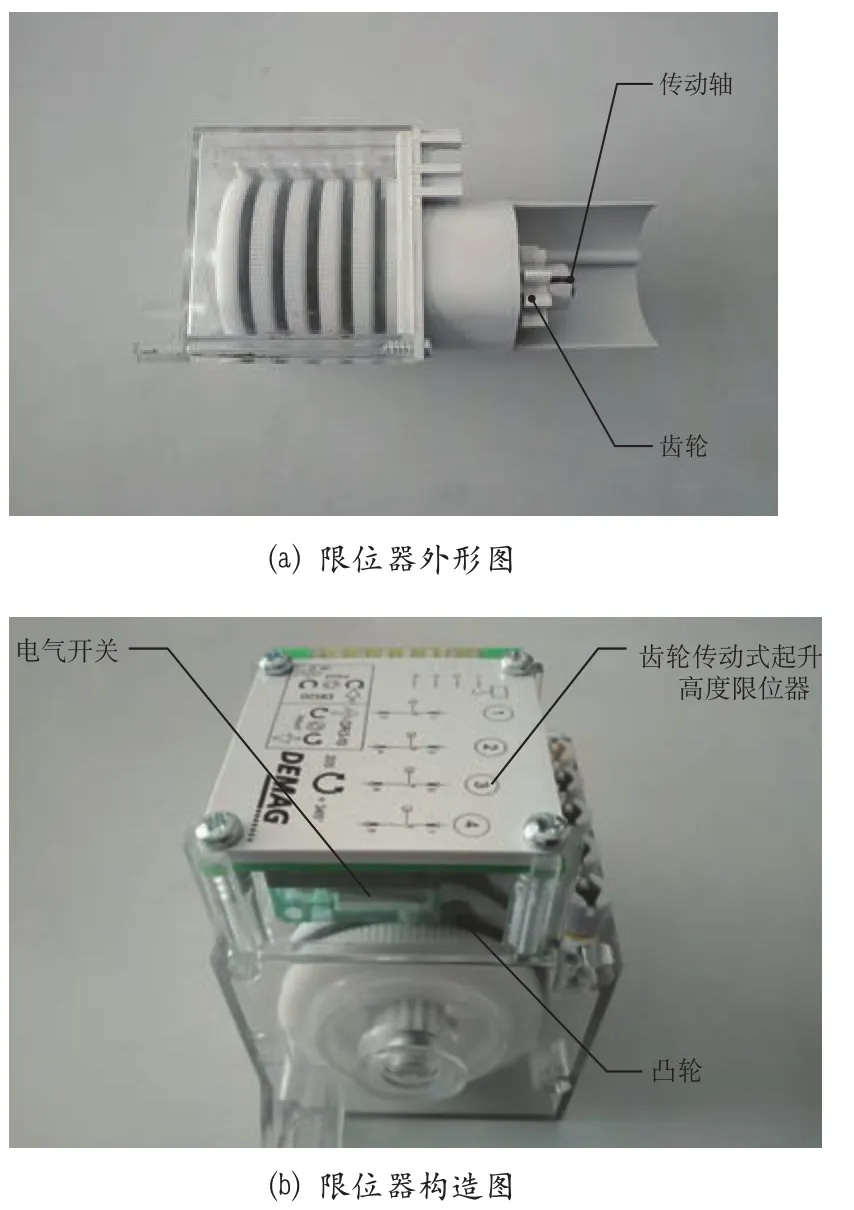
圖3 齒輪傳動式起升高度限位器
該限位器的內部為齒輪傳動形式,限位器上的齒輪與起升機構卷筒軸上的齒圈嚙合傳動(圖中略),以始終實現卷筒與限位器之間的動力傳遞。具體工作原理分析如下:
起升機構工作時,卷筒軸轉動并帶動齒輪傳動式限位器的內部齒輪減速機構按一定速比傳動運轉,同時限位器齒輪減速機構上的凸輪也隨之轉動。當吊具到達上升極限位置時,凸輪碰觸電氣開關,于是電氣開關動作并切斷上升方向動力源,促使起升機構停止上升運行。
1.2 非傳動式起升高度限位器
若將上述分析中起升高度限位器的內部為機械傳動形式,且起升機構工作時能始終實現卷筒與限位器之間動力傳遞的起升高度限位器定義為“傳動式起升高度限位器”,那么不滿足該定義的起升高度限位器則可稱之為“非傳動式起升高度限位器”。與傳動式起升高度限位器相比,非傳動式起升高度限位器最顯著的特點是:當吊具未到達上升極限位置時,該限位器始終處于靜止狀態。下面簡單介紹幾種常見的鋼絲繩卷揚式起升機構的非傳動式起升高度限位器。
●1.2.1 斷火式起升高度限位器
斷火式起升高度限位器(以下簡稱斷火式限位器)外形及安裝圖,見圖4。

圖4 斷火式起升高度限位器
斷火式限位器通常安裝固定在起升電機上,其工作系統主要包括導繩器、推桿、撞塊及斷火式限位器4個功能部件。具體工作原理分析如下:
起升機構作上升方向運行時導繩器由左向右方向水平移動,當吊鉤滑輪組接近上升極限位置時,導繩器開始碰觸固定在推桿上的撞塊并促使推桿緩慢向右側移動,從而使推桿推動斷火式限位器開始進入動作行程。當吊鉤滑輪組再次上升一定距離(CD15-6D型電動葫蘆約為600 mm)后,斷火式限位器被推桿推動而完全動作并切斷起升電機的兩相動力電源(即斷開兩相火線,故稱“斷火”),于是起升機構停止上升運行。
●1.2.2 重錘式起升高度限位器
重錘式起升高度限位器(以下簡稱重錘式限位器)外形及安裝圖,見圖5。

圖5 重錘式起升高度限位器
該限位器由電氣開關、重錘及細鋼絲3個部件組成,電氣開關通常固定在起升鋼絲繩(靜繩)上,重錘空套在起升鋼絲繩(靜繩)上并通過細鋼絲與電氣開關固定連接。具體工作原理分析如下:
當起升機構作上升方向運行且吊鉤滑輪組接近上升極限位置時,吊鉤滑輪組的外殼左側上部開始碰觸重錘并將其向上抬升,此時電氣開關因細鋼絲松弛便失去了重錘的拉力而復位,于是電氣開關動作(其常開觸頭恢復斷開狀態)并切斷上升方向動力源,促使起升機構停止上升運行。
●1.2.3 壓板式起升高度限位器
壓板式起升高度限位器(以下簡稱壓板式限位器)外形及安裝圖,見圖6。

圖6 壓板式起升高度限位器
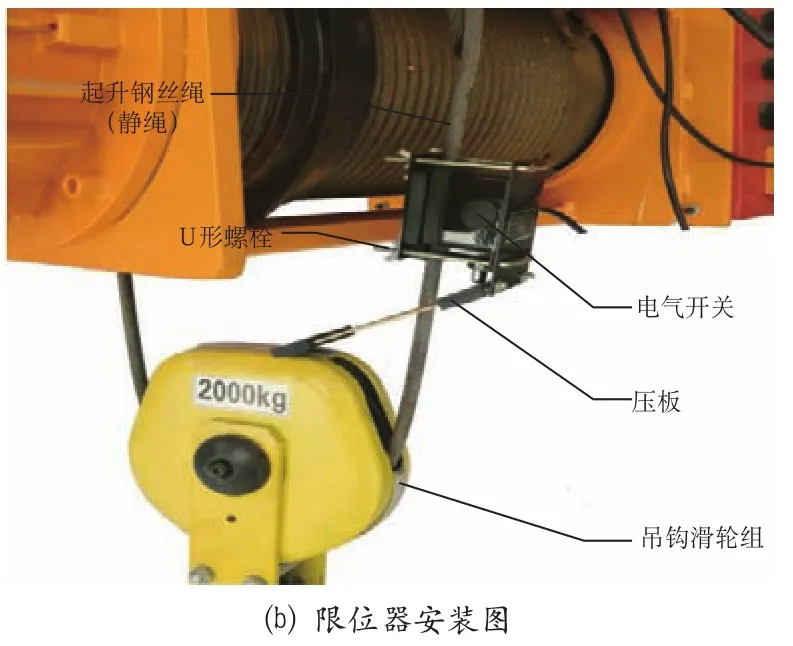
圖6 壓板式起升高度限位器(續)
該限位器由電氣開關、壓板及U形螺栓等部分組成,限位器整體通過U形螺栓固定在起升鋼絲繩(靜繩)上。具體工作原理分析如下:
當起升機構作上升方向運行且吊鉤滑輪組接近上升極限位置時,吊鉤滑輪組的外殼頂部開始碰觸壓板并繼續將其向上頂壓呈水平狀態,此時電氣開關因受壓板頂壓作用而動作(其常閉觸頭斷開)并切斷上升方向動力源,促使起升機構停止上升運行。
2 起升高度限位器的配置
2.1 對16號文關于“雙限位”要求的理解
16號文要求:對于未配置傳動式起升高度限位器的橋、門式起重機,應按時間節點要求再加裝一套不同于原配置形式的起升高度限位器,以確保滿足“雙限位”裝置的要求,達到提高設備本質安全之目的。同時,可能考慮傳動式起升高度限位器可靠性高、電氣觸頭多、易實現電氣控制的原因,未對已配置此類限位器的橋、門式起重機提出額外加裝第二套限位器的要求。但值得注意的是,16號文提出了僅配置非傳動式起升高度限位器時的數量和形式要求(即“雙限位”裝置要求),卻未明確提及相應電氣控制要求。筆者認為在提高起升高度限位可靠性方面,對電氣控制的要求[2]是必不可少的。如果忽視電氣控制要求,那么加裝限位器的工作也有可能達不到預期效果。例如:若將2個限位器的電氣觸頭串接在同一斷路裝置中,則當該斷路裝置發生因觸頭粘連等故障而導致通斷功能失效時,起升高度限位將仍然失效[3](具體電氣分析略)。因此,建議在起升高度限位的改進設計中參照GB/T 6067.1—2010《起重機械安全規程 第1部分:總則》[4]中9.2.1條關于起升高度限位器的規定予以執行。即:“起升機構均應裝設起升高度限位器。當取物裝置上升到設計規定的上極限位置時,應能立即切斷起升動力源。在此極限位置的上方,還應留有足夠的空余高度,以適應上升制動行程的要求。在特殊情況下,如吊運熔融金屬,還應裝設防止越程沖頂的第二級起升高度限位器,第二級起升高度限位器應分斷更高一級的動力源。”同時,建議特檢機構在開展相關檢驗[5-7]工作時能關注確認。
2.2 起升高度限位器形式選配
起升高度限位器形式多樣,在實際加裝過程中具體選配何種形式的限位器尤為關鍵。下面以目前廣泛使用的CD型鋼絲繩電動葫蘆(原配置單一斷火式限位器)為例,分析選配加裝限位器的形式問題。
●2.2.1 加裝重錘式限位器
CD型鋼絲繩電動葫蘆(原配置單一斷火式限位器)加裝重錘式限位器,見圖7。

圖7 加裝重錘式起升高度限位器
在原配置單一斷火式限位器的CD型鋼絲繩電動葫蘆上加裝一套重錘式限位器,并將其作為第一級限位器(通常控制上升接觸器線圈回路的電源),斷火式限位器作為第二級限位器(控制起升電機的兩相動力電源,其功能相當于電源刀開關)。具體動作過程及保護原理分析如下:
當起升機構作上升方向運行且吊鉤滑輪組到達第一起升高度設定位置時,第一級重錘式限位器動作并間接通過上升接觸器切斷起升電機的三相動力電源,促使起升機構停止上升運行。若第一級重錘式限位器失效(包括上升接觸器主觸頭粘連等原因)導致吊鉤滑輪組繼續上升到達極限位置時,第二級斷火式限位器動作并直接切斷起升電機的兩相動力電源,此時起升機構停止上升運行,從而防止吊鉤滑輪組沖頂。
●2.2.2 加裝壓板式限位器
CD型鋼絲繩電動葫蘆(原配置單一斷火式限位器)加裝壓板式限位器,見圖8。

圖8 加裝壓板式起升高度限位器
在原配置單一斷火式限位器的CD型鋼絲繩電動葫蘆上加裝一套壓板式限位器,并將其作為第一級限位器,斷火式限位器作為第二級限位器。對比圖7與圖8加裝限位器的情況,壓板式限位器與重錘式限位器的電氣控制原理一致,所不同的是壓板式限位器整體安裝固定在起升鋼絲繩(靜繩)上且位置相對靠下,而重錘式限位器的電氣開關安裝固定在接近起升鋼絲繩(靜繩)的尾端且重錘空套在鋼絲繩上。由此從圖8加裝情況來看,當第一級壓板式限位器失效導致吊鉤滑輪組繼續上升且未能到達第二級斷火式限位器動作位置時(從設計考慮,不同等級的限位器之間應保留一定的動作距離),壓板式限位器的部件(包括電氣開關、U形螺栓等)就已經卡入滑輪組,這時有可能造成滑輪破損、滑輪罩殼開裂及起升鋼絲繩折彎等破壞性后果,因而增加了事故隱患和風險點。反觀圖7中的加裝情況,若第一級重錘式限位器失效導致吊鉤滑輪組繼續上升時,重錘能沿起升鋼絲繩(靜繩)向上滑動提升,此時吊鉤滑輪組及起升鋼絲繩等均不會受損;當到達上升極限位置時,第二級斷火式限位器動作并促使起升機構停止上升運行,從而防止吊鉤滑輪組沖頂。
● 2.2.3 選配建議
基于以上分析比較,建議對原配置為單一斷火式限位器的電動葫蘆,加裝重錘式限位器為宜;同時其他僅配置單一非傳動式起升高度限位器的起升機構也應根據實際情況,因地制宜選配加裝相應形式的限位器。
2.3 對環鏈電動葫蘆起升高度限位要求的探討
以環鏈電動葫蘆作為起升機構的橋、門式起重機也較為常見,尤其以橋式起重機居多。部分環鏈電動葫蘆產品設計采用電氣+機械方式的起升高度限位來實現起升機構吊具防沖頂功能,例如KITO、DEMAG及KONECRANES等公司相關型號的環鏈電動葫蘆。下面以KITO公司ER2系列環鏈電動葫蘆為例做相應分析。
●2.3.1 杠桿式起升高度限位器
KITO公司ER2系列環鏈電動葫蘆的杠桿式起升高度限位器(以下簡稱杠桿式限位器),見圖9。

圖9 杠桿式起升高度限位器
該杠桿式限位器為電氣式、非傳動式起升高度限位器,其工作原理類似于前述的壓板式限位器。當吊具到達上升極限位置時,通過吊具上部的緩沖彈簧或者襯墊將限位桿向上方頂壓,于是安裝在葫蘆本體內部的電氣開關動作并切斷上升方向動力源,促使起升機構停止上升運行,從而防止吊具沖頂。
●2.3.2 摩擦離合器
KITO公司ER2系列環鏈電動葫蘆的內部構造圖及摩擦離合器圖,分別見圖10和圖11。

圖10 ER2系列環鏈電動葫蘆內部構造圖

圖11 摩擦離合器
該摩擦離合器為機械式,亦稱安全離合器,它兼具超載保護功能。按照生產單位的產品設計技術文件說明,當吊具到達上升極限位置時,若上述杠桿式限位器失效等原因導致電動葫蘆可能發生過卷時,吊具緊貼在葫蘆本體底部外殼產生較大的力致使摩擦離合器機構空轉,此時的提升動力便不能帶動負載滑輪轉動,即吊具無法繼續上升,從而起到防止吊具沖頂、保護電機以及機構的作用。
按照JB/T 5317—2016《環鏈電動葫蘆》[8]中5.4.1條規定:“環鏈葫蘆應具有行程限位功能,可采用機械或電氣的方法。當起重吊鉤上升或下降至極限位置或設定的位置時,行程限位功能應自動停止起重吊鉤在原方向上的運動,但并不影響起重吊鉤向相反方向的運動。”由此可見,將上述機械式摩擦離合器作為起升高度限位器的一種形式,符合JB/T 5317—2016的要求,但并不符合16號文的要求,因為16號文中提及的限位器均為電氣式限位。
筆者認為,若環鏈電動葫蘆設置了符合JB/T 5317—2016要求的能夠防止起升機構沖頂的機械式摩擦離合器,則應當等效作為起升高度限位器的一種予以考慮,但更有待于商榷。
3 結束語
總局辦公廳16號文對加強起重機械使用安全管理具有重要推動作用。生產單位應考慮不斷提高起重機械本質安全,特檢機構應對起升高度限位器的符合性作出確認,使用單位應做好起重機械日常檢查與維護保養[9]工作,從而確保起重機械安全運行。
