面向L3級自動駕駛高速公路道路測試 場景的構建方法
2023-03-17 11:48:20張美芳王小臣
汽車實用技術 2023年5期
關鍵詞:高速公路
張美芳,王小臣,王 星
(中汽科技(北京)有限公司,北京 100176)
自動駕駛作為汽車與信息通信、人工智能、數字化等多技術的融合體,已經成為世界各國汽車產業技術轉型升級的重要突破口。2020年6月,聯合國歐洲經委會汽車法規協調世界論壇上通過全球首部關于L3級自動駕駛汽車的國際性法規[1]。至此,國內外紛紛加快推進L3級自動駕駛相關政策及產品。
高速公路場景作為L3級自動駕駛的典型場景,必須進行測試驗證。國內開展高速公路自動駕駛測試的城市主要有北京、長沙、濟南等[2]。長沙在封閉測試區內建立了首條3.6 km雙向模擬高速公路的測試道路,后期將籌建智慧高速,以開展自動駕駛干線物流測試示范應用場景[3]。齊魯交通智能網聯高速公路測試基地作為國內第一條基于自動駕駛的智能網聯高速測試路段已經全線通車,該路段縱坡較多,場景真實,具備作為智能網聯高速公路測試的天然優勢[4]。北京市2021年推出全國首個高速公路及城市快速路自動駕駛測試管理政策,先行開放京臺高速北京段(五環路—六環路)雙向10 km路段[5],未來還將逐步開放6條143 km的高速公路、城市快速路段。
自動駕駛測試場景是支撐智能網聯汽車測試評價技術的核心要素與關鍵技術[6-7]。自動駕駛測試場景具有無限豐富、不可預測、不可窮盡等特點,以場景為基礎,構建包括仿真測試、封閉場地測試及實際道路測試的“多支柱”評價體系已成為業內公認的最佳測試手段。目前,測試場景并沒有統一的規范標準,同時存在場景庫內容采集、數據處理、典型場景選取及全面評價等多方面的技術難題,本文通過對L3級自動駕駛高速公路道路測試場景構建方法的研究,為后續道路測試評價方法提供基礎。
1 L3級自動駕駛高速公路道路測試場景要素
在進行道路測試場景構建時,首先需明確測試場景所覆蓋的要素,也就是場景結構的過程。基于國際、國內自動駕駛測試場景標準規范、道路交通事故場景和測試經驗[8],建立智能網聯汽車道路測試場景要素庫,通過選取基本要素與要素組成,從功能和邏輯等維度進行梳理組合,提取自動駕駛測試場景。
自動駕駛測試場景的來源非常廣泛,主要可分為4類:自然駕駛數據場景、危險工況場景、法規場景、重構場景。
自然駕駛數據場景主要是通過人類駕駛車輛由設備采集生成的場景,是汽車駕駛過程中存在的最真實場景,也是構建自動駕駛測試場景中的基礎數據來源。通過安裝在車輛上的多種傳感器,例如攝像頭、毫米波雷達、激光雷達、慣導等設備,采集車輛信息、道路環境、駕駛人行為等多維度信息,分析真實的交通道路環境,從而構建自然駕駛數據場景庫。
危險工況場景主要包括惡劣天氣環境、復雜道路交通以及典型交通事故場景。惡劣天氣環境包括大雨、大霧、大雪、霧霾、強烈逆光等可能使自動駕駛傳感器功能受限的環境,以及結冰、積雪、橫風等可能影響自動駕駛系統操縱控制的環境;復雜道路交通包括多車道選擇、環島、交通擁堵、多層立體交通樞紐等;典型交通事故場景包括各類交通事故真實場景。
法規場景是自動駕駛功能在研發和認證階段需要滿足的基本場景,例如國際標準化組織(International Organization for Standardization, ISO)、推薦性國家標準(GB/T)、美國高速交通安全管理局(National Highway Traffic Safety Administration, NHTSA)、新車評價規程(New Car Assessment Programme, NCAP)、中國交通事故深度調查(China In-depth Accident Study, CIDAS)[9-13]中都有標準測試場景。
重構場景是通過仿真將場景模塊化,將一個仿真場景分解多個模塊,通過各個模塊參數在符合場景邏輯的排列組合隨機生成或自動重組,進而補充大量未知工況的測試場景,有效覆蓋自動駕駛功能測試盲區。
本文中的L3級自動駕駛高速公路道路測試場景要素的選擇主要是通過分析標準規范場景,包括 ISO、NTHSA等場景,參考《自動駕駛自動化分級》[14],結合網絡事故視頻、公安交管道路交通事故數據和事故還原等道路交通事故和人為駕駛經驗[15],將自動駕駛車輛道路測試場景要素庫劃分為設計運行范圍(Operational Design Domain, ODD)、駕乘人員狀態、車輛狀態3部分。
設計運行范圍主要包含環境條件、靜態要素、動態要素,如表1所示。
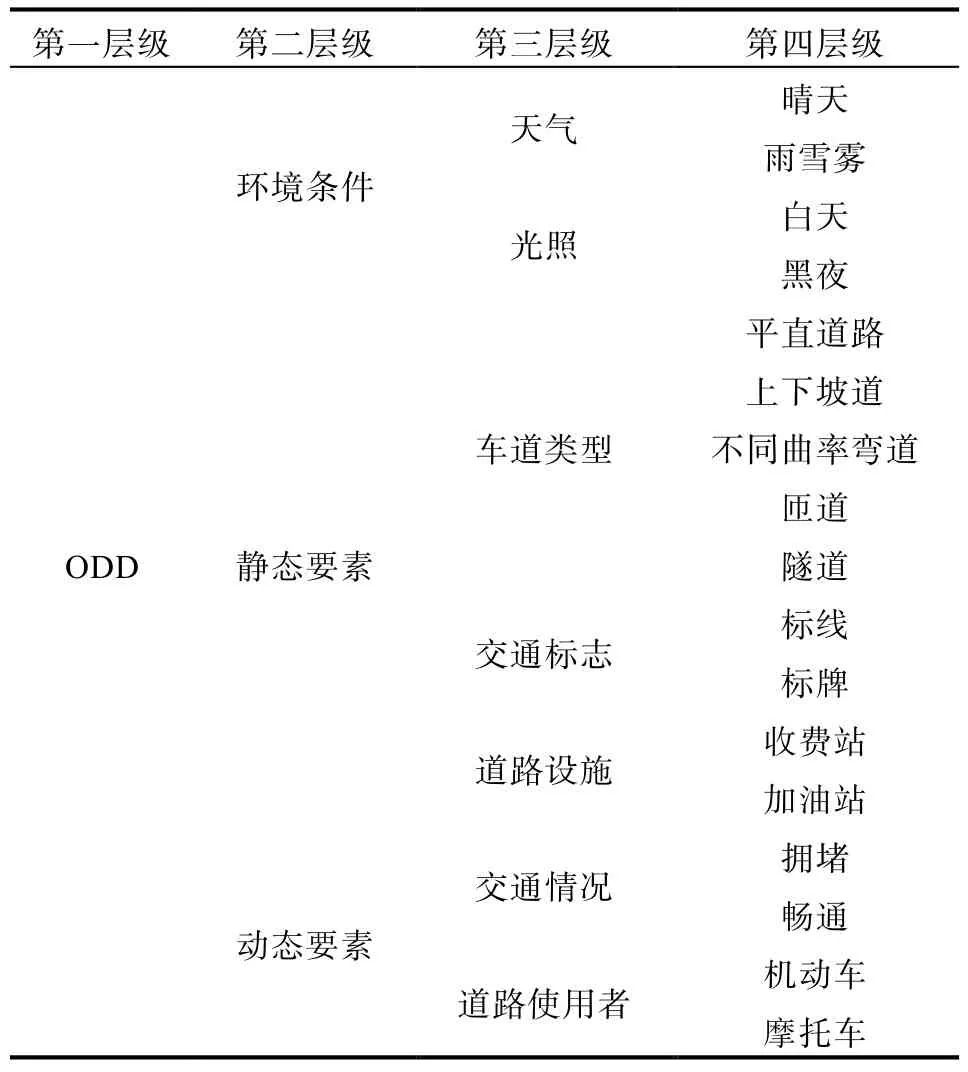
表1 L3級自動駕駛高速公路道路測試ODD環境要素
環境條件主要分為天氣和光照情況等信息。天氣情況包含晴天和雨雪霧,不同天氣情況下對傳感器的工作精度和工作范圍有較大影響。光照條件影響測試場景采集過程中的能見度,尤其是對視覺傳感器的感知影響。
靜態要素是指沒有物體運動,且可以通過視覺感受到的區域場景,如道路類型、交通標志、道路設施等。道路是靜態環境要素的核心,包括平直道路、上下坡道、不同曲率彎道、匝道、隧道。交通標志是用以管制、警告和引導交通安全的設施,各類標志依據《道路交通標志和標線》(GB 5768—1999)來定義,高速道路上主要存在標線和標牌。道路設施主要有收費站及加油站。
動態要素即在車輛動態駕駛任務中處于動態變化的要素。動態環境要素在高速場景中主要包括交通情況及道路使用者。交通情況分為擁堵和暢通兩種,道路使用者信息描述的是自動駕駛測試場景中對本車決策規劃造成影響的對象信息,高速公路車輛主要有機動車和摩托車。
駕乘人員狀態主要分為駕駛員和乘客狀態[16],如表2所示。駕駛員狀態中的疲勞狀態和位姿狀態等程度由企業進行自定義,如從打哈欠時間、閉眼時間等來判定。乘客狀態主要分為位姿狀態和安全帶狀態,對乘客的基本狀態進行識別,從而判定自動駕駛是否可以為其開始提供服務。
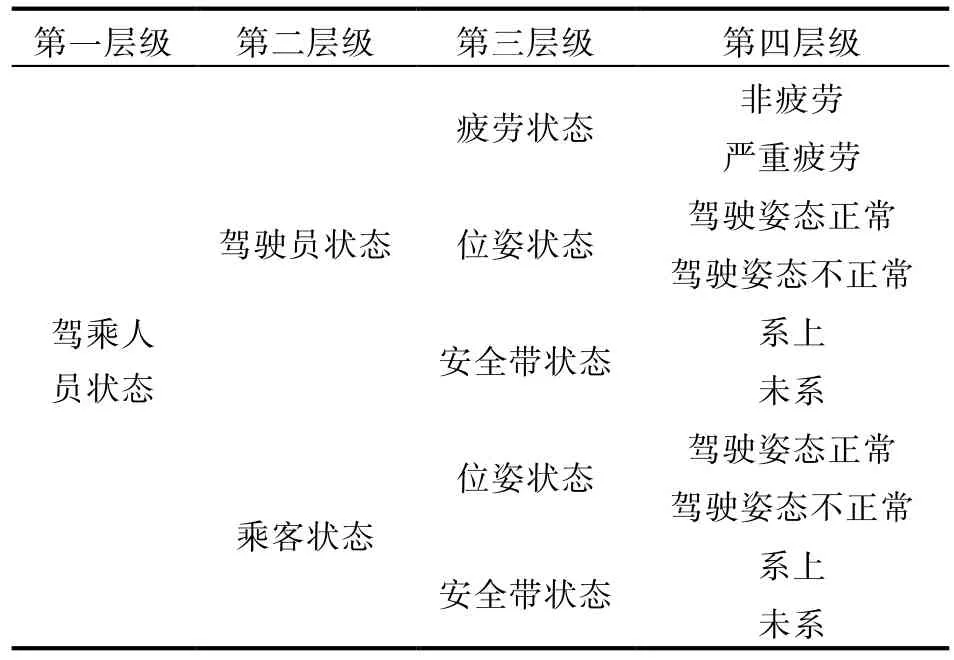
表2 L3級自動駕駛高速公路道路測試駕乘 人員狀態場景要素
車輛狀態正常運行是自動駕駛系統啟動和運行的前提條件之一,包括激活速度范圍及功能狀態,如表3所示。激活速度范圍主要是指自動駕駛系統能夠開啟的速度范圍。根據國外L3級高速公路自動駕駛激活速度范圍。功能狀態主要是指自動駕駛系統在安全啟動前需要進行自檢功能模塊的狀態,包括人機交互功能、車用無線通信技術(Vehicle to X, V2X)功能、高精度地圖功能、最小風險控制策略。
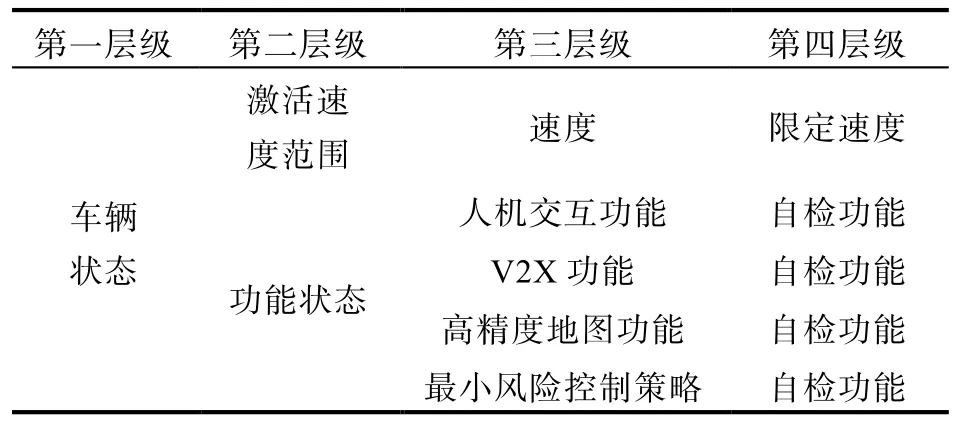
表3 L3級自動駕駛高速公路道路測試車輛 狀態場景要素
2 L3級自動駕駛高速公路道路測試場景構建
測試場景包含許多要素,多種要素組合成多種多樣的場景。自動駕駛場景構建的思路是從自動駕駛功能出發,結合已有的駕駛經驗,形成具有真實性、代表性和有效性場景的集合。
自動駕駛測試場景構建首先是需要對場景數據進行采集。數據采集通過車輛采集平臺實現,采集車輛安裝攝像頭、激光雷達、毫米波雷達等多種采集傳感器,規定采集格式和存儲方式,基于實車場景數據采集、事故場景數據采集及其他相關場景進行數據采集,對采集后的數據利用自動化處理工具進行特征提取。
場景構建的第二步是對場景數據進行分析挖掘。將采集回來的數據進行處理,統一格式后再導入場景庫中,對相關場景進行聚類、生成和優化等處理,從而構建出不同的道路場景。場景分析挖掘技術通常需要對場景進行場景理解、特征提取、場景聚類、場景生成等一系列的工作方法來完成。場景理解應用中,經常通過模型建模的過程,分為模型特征表示、學習推理及評價。隨著深度學習的發展,基于卷積神經網絡的檢測模型逐漸成為首選方案;特征提取就是在場景理解的基礎上,對各種要素進行特征提取,進行數值化的描述,例如對場景中的位置信息、速度、加速度、轉向角等信息進行提取;場景聚類是對大量的場景信息進行進一步的分析,也就是對場景進行分類和聚類,通常用的方法有DBSCAN(Density-Based Spatial Clustering of Applications with Noise)、OPTICS(Ordering Points to Identify the Clustering Structure)等[17]。現實道路上的車輛在行駛過程中會遇到各種各樣的場景,自動駕駛測試難以覆蓋所有場景,為了提高場景覆蓋率,通常采用對現有場景進行歸納處理,衍生出更多合理的場景,也就是場景重構。
之后是對場景通過關聯數據標簽后進入測試層,測試層就是對提取出的場景進行虛擬仿真、實車道路測試等方法進行驗證,確認場景的真實性、有效性及代表性,從而更好地服務于研發測試工作。
通過分析高速公路自動駕駛場景特性,根據場景要素庫中的組成要素,從功能、邏輯等維度進行組合,得出不同環境、道路、車輛狀態下的測試場景[18],參考《智能網聯汽車道路測試與示范應用管理規范(試行)》及《自動駕駛車輛道路測試能力評估與方法》(T/CMAX116-01—2020)[19],從自動駕駛車輛應急處置與人工介入能力和綜合駕駛能力等方面,設計搭建38組城市高速公路道路測試場景,如表4所示。

表4 L3級自動駕駛高速公路道路測試場景及項目
3 場景驗證試驗
得到的測試場景需要經過初步的測試驗證后才能用于自動駕駛車輛的測試研發工作,場景試驗驗證分為實車驗證試驗和虛擬仿真驗證試驗。
基于實車進行的場景驗證,需要在專業的封閉測試場根據場景參數進行場景要素設定,包括動態環境要素和靜態環境要素的設定。場景要素設定完成后,執行場景驗證試驗,記錄相關試驗數據,根據試驗數據分析場景設定的合理性。
由于實車驗證試驗存在成本高、效率低等缺點,隨著虛擬仿真測試技術的進步,考慮采用虛擬測試進行場景驗證試驗。
4 總結
在自動駕駛車輛進入市場前,需要大量測試證明其各項功能和性能的穩定性、可靠性和魯棒性等。自動駕駛測試對象由傳統的車變為車-人-環境-任務強耦合的系統,給測試及驗證帶來大量挑戰。傳統車輛測試方法已經無法滿足自動駕駛車輛全面測試驗證的需求。現有的測試場景搭建及驗證試驗費用高、效率低、場景不全面,后續需要一套快速生成測試場景的方法。根據自動駕駛測試場景的發展趨勢,結合我國實際情況,建議建設國家自動駕駛測試場景標準化工作,統一場景及要求,驗證自動駕駛功能的確定性。通過自動駕駛測試場景技術的研究,推動自動駕駛技術的成熟。
猜你喜歡
建材發展導向(2021年20期)2021-11-20 05:43:18
鴨綠江(2021年17期)2021-10-13 07:05:32
中國交通信息化(2020年8期)2021-01-26 00:51:18
中國交通信息化(2020年10期)2021-01-14 03:29:50
中國交通信息化(2019年6期)2019-08-23 08:28:40
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
中國交通信息化(2017年3期)2017-06-08 06:09:23
中國交通信息化(2016年9期)2016-06-06 07:42:10
小說月刊(2014年4期)2014-04-23 08:52:20
筑路機械與施工機械化(2014年5期)2014-03-01 02:59:08