基于RSM和NSGA-Ⅱ法的重載機械臂結構優化設計
2023-03-23 10:51:26魏文清鄭雪楷
起重運輸機械 2023年2期
魏文清 劉 放 鄭雪楷 楊 言
西南交通大學機械工程學院 成都 610031
0 引言
隧道施工環境復雜多樣,在險峻地形下作業難免會遇到極大安全風險[1]。為應對隧道的復雜工況,施工作業機械臂被廣泛引入到施工一線[2]。當前,高負載下的工程作業機械臂存在控制精度不足、冗余質量過高等問題,為了實現機械臂更高的控制精度,首先要實現更可靠的機械臂結構,需要在靜剛度、強度滿足許用要求的情況下擁有更好的截面參數,以實現更精確的控制[3]。
在目前的結構件設計中,以經驗或半經驗導向的結構設計依然處于設計方法的主要地位[4]。為此,對于復雜結構難以得出結構截面參數與實際所需優化目標的顯式表達式問題,由Box GEP等[5]提出的響應面方法(RSM)逐步成為一種行之有效的設計思路;孫喜龍等[6]利用響應面方法優化了轎車車身防撞性能;劉德仿等[7]利用響應面方法對噴印機結構進行了結構參數優化。
目前,運用響應面分析模型優化機械結構參數的方法被越來越多地運用于工程實際問題中,對響應面模型求解在結構優化設計中成為不可或缺的一環。隨著各類智能算法的發展,利用智能優化算法求解多變量非線性優化問題亦成為趨勢。包世剛等[8]利用多目標遺傳算法求解動車組水箱的響應面模型提出了復雜模型的結構優化設計。
在目前的機械臂設計中,利用經驗公式與仿真試驗結合的方法已無法滿足實際需要,故而利用響應面方法建立數學模型并結合智能算法的求解是大勢所趨。
1 液壓重載機械臂優化方法
1.1 傳統響應面優化方法
傳統響應面方法一般用于優化設計中,即通過合理的實驗設計方法解決目標的建立、約束與設計變量之間的近似函數等問題。其實驗設計概括如下:
1)在某個樣本點(高維空間的點)做實驗,其中1組設計變量x=(x1,x2,…,xn)T為一個樣本點,得到1個未知性能的結果(即樣本值)。
2)為了得到未知性能相應的函數,1個樣本值遠遠不夠,欲取多個樣本點就要涉及1組樣本點在高維空間中的排放問題,即實驗設計方法。其基本理論為:對于未知的待求性能函數y=y(x)難以找出準確表達式,但對于給定的參數點或設計點則可通過實體或數值實驗得到相應性能值y j=y(x(j)),這是對應相應參數點或設計值的一個響應值。
因此,對于足夠多的實驗(如m個實驗),即可利用m個樣本點及其所產生的m個響應(即性能的樣本值),利用待定系數的方法求出函數y=y(x)的近似函數,即
式中:為待構造的響應面函數,f(x)為性能函數,ε為誤差項。
一般地,采用含交叉項的二次型函數可表示為
式中:α0為常數項待定系數αj為一次項待定系數,αij為二次項待定系數,βi為待定系數。
1.2 通過中心展開點的改進響應面優化方法
當迭代收斂時,傳統響應面優化方法存在約束在當前設計點(中心點)不能嚴格滿足約束條件的問題。因此,傳統響應面方法在中心設計點擬合值不精確,現采用通過中心展開點的改進響應面模型[9]。對機械臂優化問題建立通過中心展開點的改進響應面模型,其基本思想有2點:
1)在實驗點中選取一點x(0),響應面函數在該點取值等于實驗值y(0),即[x(0)]=y(0),稱該點為中心展開點;
2)響應面函數在其余m-1個實驗點的取值與實驗值的誤差滿足最小二乘法的原則。將中心展開點代入式(2)可得
將式(3)代入式(2)可得
定義響應面函數值與真實值之間的誤差ε=(ε1,ε1,…,εm-1)T表示為
對其他實驗點做最小二乘擬合,可得
由駐值條件得到
將其以矩陣形式表示為
得到解為
將其代入式(3)求得β0,將β0代入響應面函數可得通過中心展開點的響應面模型為
1.3 多目標非支配排序遺傳算法(NSGA-Ⅱ)
采用多目標非支配排序遺傳算法(NSGA-Ⅱ)求解響應面模型,其優勢在于將非支配分類程序引入,通過將多個目標簡化為單個適應度函數的評價方式[10]。與傳統的遺傳算法相比,該算法的優勢是在選擇算子執行前依據個體間的支配關系對種群進行分層排序。在進行支配關系排序后,將非支配個體作為一類處理來共享虛擬適應度值,進而對種群剩余個體分級并賦予相應虛擬適應度函數值。其優化流程如圖1所示。

圖1 多目標非支配排序遺傳算法(NSGA-Ⅱ)優化流程
2 液壓重載機械臂優化模型構造
2.1 液壓重載機械臂構組成
液壓重載機械臂為六自由度多關節機器人,其結構如圖2所示。液壓重載機械臂主要由轉臺、二級伸縮臂、折臂回轉機構、折臂、飛臂及末端執行器等組成,由液壓驅動,含有2個液壓馬達、變幅液壓缸、伸縮液壓缸、折臂液壓缸、飛臂液壓缸。其中,初級回轉支承、折臂回轉機構均為內外圈結構的回轉減速器的結構形式,采用液壓馬達和蝸桿蝸輪驅動,具有自鎖功能。回轉支承外圈固定安裝于車架頂面。

圖2 液壓重載機械臂結構
在液壓重載機械臂運動過程中,主要承力的部件為二級伸縮臂部分,為此本次著重構建重載機械臂二級伸縮臂的參數模型,基于此模型建立響應面模型并最終完成優化。
2.2 液壓重載機械臂力學模型分析
二級伸縮臂在變幅平面內進行受力分析時,不僅需要考慮伸縮臂及其后端負載對二級伸縮臂臂架結構的彎矩載荷,也應考慮回轉平面內折臂、飛臂和抓取重物對二級伸縮臂的扭矩載荷。在二級伸縮臂外伸展開過程中,一節臂與二節臂之間的重疊部分逐漸減少,二節臂外伸至最遠端時的重疊面積最小,存在相互脫離趨勢,會產生危險截面。
為了保證整體結構強度,伸縮臂主體材料采用Q460高強度鋼,材料的彈性模量為210 GPa,泊松比為0.33,密度為7 850 kg/m3,屈服極限為460 MPa。
1)建立理論模型
伸縮臂截面如圖3所示,圖中的i=1、2,表示二節臂。伸縮臂整體受力如圖4所示,截面對Z軸整體的慣性矩為

圖3 臂截面圖

圖4 伸縮臂整體受力圖
式中:Ai為二節臂的截面,y為Y方向的坐標。
二級伸縮臂各截面關系圖如圖5所示,圖中的ai、bi分別為滑塊i的厚度、寬度,c1、c2分別為一節臂與二節臂的臂厚。

圖5 截面關系圖
2)確定二級伸縮臂的危險截面
對二級伸縮臂進行理論力學分析可得最大彎矩為
式中:F31為液壓桿支撐力,F21為第2節臂對第1節臂的作用力,F12為第1節臂對第2節臂的作用力,L12為一節臂與二節臂重合長度,L1為第1節臂長度。
由此可見,伸縮臂的危險截面出現在第1節臂與第2節臂重合處,故對此危險截面處設計參數進行優化。
2.3 設計變量選定
選定伸縮臂危險截面各設計參數作為設計變量,即有
優化目標是使二級伸縮臂質量在條件允許范圍內達到最小值,即
根據GB/T 3811—2008《起重機設計規范》分別設定優化約束條件,最大等效應力不超過許用應力,即δ=377 MPa;最大變形量不超過7 mm,故二級伸縮臂的多目標優化模型可表述為
式中:X為設計變量,f(x)為最大等效應力,l(x)為最大變形量。
3 二級伸縮臂響應面優化設計
3.1 構造響應面
為在極少試驗下得到較高精度的響應面方程,現采用拉丁超立方設計(latin hypercube sampling)[11]來生成坐標點,如圖6所示。

圖6 隨機拉丁超立方
在一個設計空間中抽取n個樣本,每一個樣本由m個分量組成,將每個分量的取值范圍均分為n個,這樣便可將這n個樣本均勻地投放入設計空間內。當投放樣本時,既要滿足每一個樣本點在小區間內均勻分布,也要滿足所有樣本點被投影到任意一維時每個區間樣本點有且唯一。本方法與全因子設計法相比,在設計變量個數增加時,設計點數量并不會呈指數形式上升,抽樣效率較高。
根據材料的特性參數,選取對二節伸縮機械臂影響最大的結構參數為設計變量,包括伸縮臂截面寬P1、伸縮臂截面長P2、板厚P3、上滑塊厚P4、上滑塊寬P5、側滑塊厚P6、側滑塊寬P7等。尋找這一設計變量組合對整體結構的影響趨勢,即可求得響應面,實現對整體結構的優化。利用拉丁超立方設計方法針對這7個設計變量與3個響應設計了28組試驗,試驗方案與結果如表1所示。
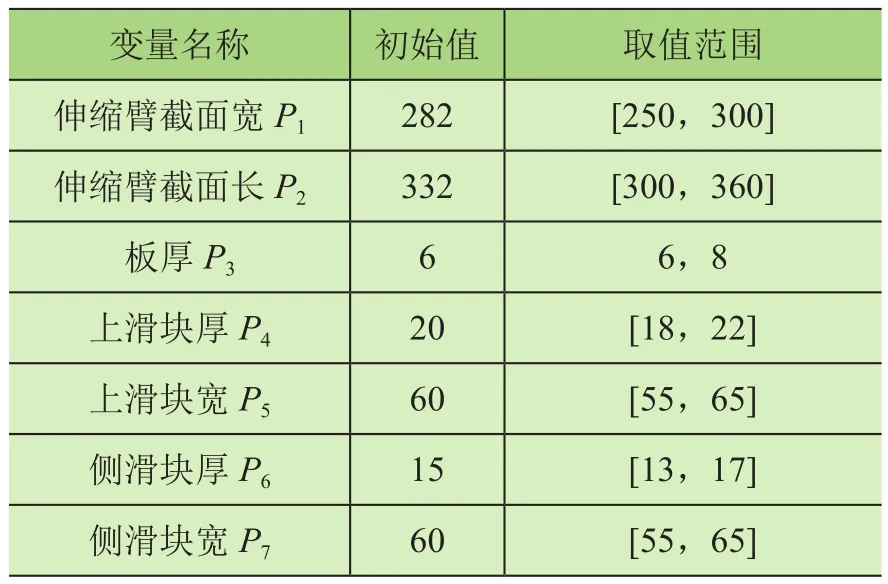
表1 設計變量及取值范圍 mm
3.2 響應面預測能力準確性評估
由于復相關系數R2存在缺陷[12],即回歸方程中自變量個數增加時,可能存在的冗余參數會提高R2的值,使得復相關系數無法準確預估回歸方程的逼近程度,現采用修正的復相關系數R2adj來判斷響應面的擬合程度,此時當參數個數增加時,R2adj不會隨之增加。其計算公式為
式中:m為樣本點矩陣的行數,k為參數個數,yi為響應值;i為響應估計值;為響應均值。
對表1試驗設計點進行計算評估以確定函數擬合情況,計算結果如表2所示。

表2 拉丁超立方試驗設計點

續接表2
由表3數據可知,3個目標函數的修正復相關系數分別為0.9989、1、1。由圖7所示目標函數的響應面預測圖可知,對于這3個目標函數,其預測值與計算值的關系曲線接近45°曲線,預測較為準確,與復相關系數吻合。本文中所有復相關修正系數均大于工程所需0.9的標準,且最大變形量與目標總質量的觀測點可完全落在回歸方程所確定的曲面上。由此可以看出,改進的響應面方法具有更好擬合水平,響應面可以較好地預測各設計變量的真實值,故可采用本響應面模型。

表3 響應面復相關系數分析

圖7 目標函數響應面預測圖
3.3 改進型RSM優化結果
采用多目標非支配排序遺傳算法(NSGA-Ⅱ)求解式(9)所示響應面模型,可以得到多個Pareto解。
對于該機械臂的各目標優化中,各目標相互耦合,由此無法同時得到各目標的最優值。因此,需要對各優化目標進行判斷權衡,以選取各目標的最佳平衡點,而表3所示的3組解在整個解域中為不同的優勢解。
由于本次優化設計目標為質量輕量化,故選取候選點1為Pareto最優解。對候選點1進行圓整,以圓整后的值作為二級伸縮臂的最優設計點,對該參數下的機械臂受載情況進行仿真分析,得出如表4所示優化解。

表4 Pareto候選解數據
對比優化前后的二級伸縮臂(見表5),響應面預測值與材料力學仿真分析值較為接近,表面響應面擬合隱函數精度較高;結構尺寸得到了優化,二級伸縮臂質量減輕了12.9%,伸縮臂最大應力與最大變形量均處于材料許用范圍內。
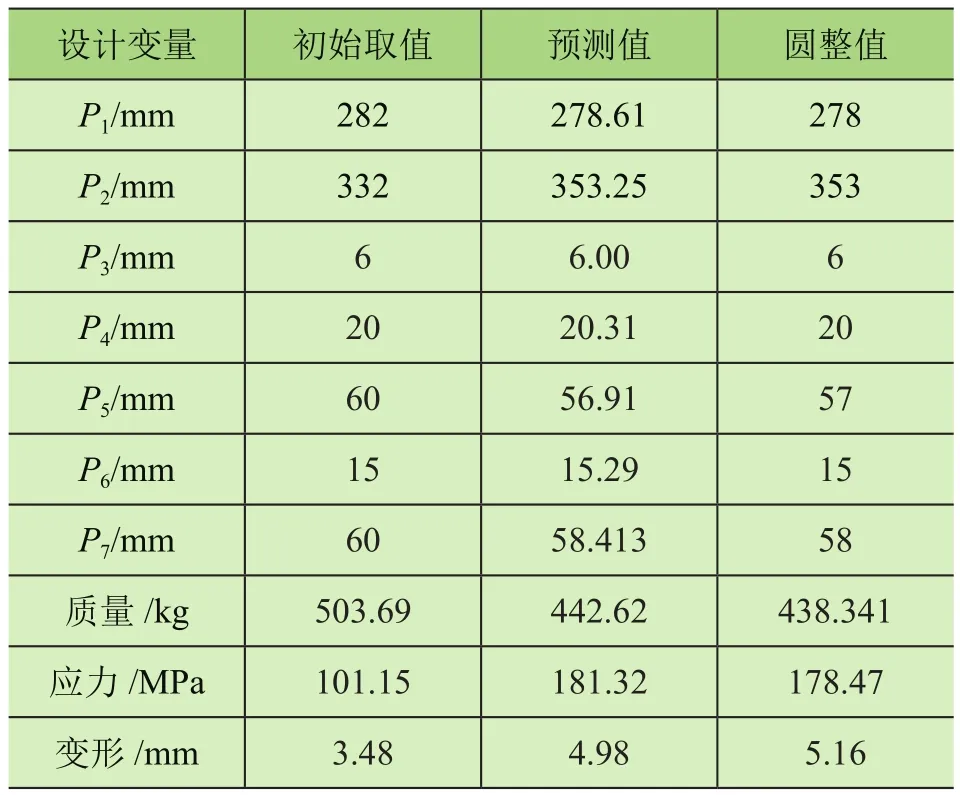
表5 優化前后對比
4 結論
1)利用基于中心展開點的響應面方法獲得比傳統響應面方法更精確的響應面擬合值,減少了多目標優化過程的優化時間。
2)采用拉丁超立方實驗設計可以相對較少的實驗數目設計完成較高精度的響應面模型,可在將各參數對模型力學參數影響的非顯性關系可視化,為多目標優化問題提供更好地幫助。
3)運用改進型響應面方法與遺傳算法相結合對二級伸縮臂系統的力學性能的優化效果較好,可用于二級伸縮臂部分板件厚度組合的確定。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
Coco薇(2016年2期)2016-03-22 02:42:52
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
Coco薇(2015年1期)2015-08-13 02:47:34
