一種基于無跡卡爾曼濾波和炮彈運動軌跡模型的落/發點外推新算法
2023-03-24 02:49:56顏波濤李同亮
艦船電子對抗 2023年1期
顏波濤,于 瓊,李同亮
(1.中國電子科技集團公司第三十八研究所,安徽 合肥 230031;2.中國人民解放軍陸軍工程大學,江蘇 南京 210001)
0 引 言
現代戰場的炮兵作戰,依然是一種強有力的作戰方式。炮位偵校雷達一方面具備偵察功能,通過對敵軍射出的飛行彈丸上升段進行搜索、跟蹤、彈道外推來獲取敵軍火炮陣地的位置,為我方武器對其進行打擊提供指導;另一方面,其具備校射功能,通過對我方射出彈丸的落點位置進行快速預測、比較偏差,從而校正火炮發射,很大程度上提高了我方火炮作戰性能[1-2]。
從炮位偵校雷達的工作過程來看,決定其效果的主要有3個階段:(1)目標搜索確認階段;(2)目標跟蹤測量階段;(3)目標數據處理階段,即彈丸落/發點外推。本文重點研究對測量數據的處理,即彈道外推算法。
現今,主要有2類彈道外推算法:一是基于先驗樣本的機器學習算法,其原理是利用彈道先驗數據對彈道模型進行統計建模,再對當前彈道進行辨識。但是,炮位偵校雷達的實時性要求較高,且機器學習算法基于的大量準確的先驗樣本一般難以提供,因此,一般認為炮位偵校雷達的數據處理不宜采用機器學習算法;二是卡爾曼濾波估計算法,該類算法以彈道模型為基礎,先利用卡爾曼濾波方法從包含噪聲的量測數據中對系統參數進行辨識,再進行落/發點預測。其中較為常用的濾波算法有擴展卡爾曼濾波(EKF)、無跡卡爾曼濾波(UKF)等。應雷達實際需求的發展,各種非線性濾波方法逐漸成為炮位偵校雷達數據處理的研究重點[3-5]。
根據作者文獻調研的結果,本文首先選擇了較為先進的無跡卡爾曼濾波(UKF)作為彈道外推新算法的濾波方式,減輕了量測噪聲的影響、辨識系統參數,再基于一種先進的炮彈運動軌跡模型,利用四階龍格-庫塔方程進行落/發點外推。期間,針對偵察模式加入了反向濾波和“七態”等策略,進一步提升算法效果。仿真測試結果顯示,相比于其它2種國內雷達常用的經典彈道外推算法,該算法的定位精度大大提高。
1 算法及測試
1.1 算法介紹
前文已述,所提出的算法可以分成2個部分,利用無跡卡爾曼濾波方法(UKF)對雷達量測數據進行濾波,再利用濾波結果,基于一種先進的炮彈運動軌跡模型和四階龍格-庫塔方程進行外推,獲得彈丸落/發點坐標。針對偵察模式,附加了反向濾波和“七態”等策略。下文將對各個部分做詳細介紹。
1.1.1 濾波模型
1.1.1.1 炮彈運動彈道模型
(1) 校射所用彈道方程
校射時,雷達跟蹤彈道降弧段。由于彈丸的參數均已知,因而所采用的彈道模型擬考慮利用彈丸自身的氣動力系數,同時要涉及非標準條件(包括非標準彈道條件、非標準氣象條件)。但是,顧及到計算時間,彈道方程又不能太復雜。對彈道降弧段,也沒有必要采用6自由度剛體彈道方程,不過對偏流則應適當計及[6-8]。
以x表示射距離,y為高度,z為側偏,非標準條件的彈丸運動方程為:
(1)
(2)
式中:vr是相對速度,其表達式為:
(3)
Cs是聲速,其表達式為:
(4)
式中:G=6.328×10-3(K/m);τ0=273.15+t0,t0是地面氣溫(℃)。
ρ是空氣密度,當y<10 km時,可取下列公式:
ρ=ρ0exp(-β′y)
(5)
(6)
地面密度ρ0與地面氣壓p0的關系由下式決定:
(7)
式中:M為空氣1 kmol的質量,為28.964 4 kg/kmol;R為普適氣體恒量,為8.314 32×103 J/(kmol·K)。
(8)

(2) 偵察所用彈道方程
由于雷達跟蹤仰角不會小于2°~3°,因此即使敵方發射戰術火箭,其彈道也將超過主動段而屬彈道被動段。與校射彈道模型比較而言,其主要不同點在于:(a)偵察中的彈箭參數是未知量;(b)偵察彈道升弧段的前部分接近直線,偏流很小,可略去不計。由此仍以式(1)為基礎,并做適當變更。首先令:
(9)
(10)
式中:C為彈道系數;Cxon(Ma)為標準彈的阻力系數,通常稱之為阻力定律。
在彈道計算中,彈道系數對給定射角為常量,那么,N與N1所依賴的狀態變量之間的函數關系是相同的。
其次,設置式(1)中的Kz=0。
最后,增設狀態變量C,對彈道系數進行估計,得到偵察彈道的狀態方程。
1.1.1.2 無跡卡爾曼濾波
無跡卡爾曼濾波(UKF)的產生和發展是基于不敏變換。其原理是,首先利用1組確定的樣本點對狀態向量分布進行反映,然后利用任意非線性函數進行轉換后,這些樣本點依然能夠良好反映函數分布,通過整個過程對函數真實值精確估計,精度幾乎可以達到2階以上。UKF相對于一階擴展卡爾曼濾波(EKF)具有更高的精度,而且避開雅可比矩陣的計算,不過相比EKF計算量仍有所增加[7-9]。
在外推算法的數據處理中,校射模式下,由于彈道系數已知,估計的狀態向量維數為6,即六態,包括位置和速度;偵察模式下,增加了對彈道系數C的估計,即七態。
UKF的處理過程:
(1) 選取不敏變換采樣點,以標準對稱采樣為例。在已知非線性函數的均值Xk-1|k-1和協方差Pk-1|k-1時,選擇2L+1個采樣點(L為狀態向量的維度)進行下列計算:
χ0=Xk-1|k-1
(11)
(12)
(13)
(14)
(15)
(16)
(17)

(2) 計算狀態預測
(18)
χk|k-1=f(Xk|k-1,k-1)
(19)
(3) 計算預測協方差矩陣
[χi,k|k-1-Xk|k-1]T+Qk-1
(20)
(4) 計算量測預測
(21)
ξk|k-1=h(χk|k-1,k)
(22)
在上述步驟完成后,即可完成濾波估計。UKF的過程通常是逐漸收斂的,也即是說,一般濾波末點的精確度最高,因此,彈道外推算法通常選擇濾波終點作為外推起點。
1.1.2 彈道解算
炮位偵校雷達的彈道外推算法包括2個步驟:(1)對跟蹤目標的量測數據進行非線性濾波,辨識彈道參數;(2)沿彈道起點方向進行解算,當解算至既定高度時結束計算,獲取外推結果[9-10]。
目前較為廣泛的解算方法是通過既定彈道模型建立彈道方程組,再采用數值計算方法解算彈道,最后推算落/發點。
解彈道微分方程組的方法很多,目前工程上應用較為廣泛的是4階龍格-庫塔法[11]。
龍格-庫塔解法是一種以函數y(x)的泰勒級數分解為基礎的解算方法,形式如下,首先建立微分方程組并獲取初值:
(23)
yi(t0)=yi0(i=1,2,…,m)
(24)
假設方程組在某時間點n處各變量的值為(t,y1n,y2n,…,ymn),則下一時間點n+1處,可通過4階龍格-庫塔算法計算各變量的值:
(25)
(26)
式中:h為迭代時間間隔。
采用此算法求解彈道落/發點的迭代過程如下:
步驟1:令n=0,t0=0,濾波末點狀態向量作為yi,0的初值代入;
步驟2:利用tn和yi,n,計算過程值Ki1,Ki2,Ki3,Ki4;
步驟3:計算
yi,n+1=yi,n+(Ki1+2Ki2+2Ki3+Ki4)/6
(27)
步驟4:判斷循環是否可結束,若否,令n=n+1,返回步驟2;若是,輸出結果,結束。
1.1.3 偵察模式下的附加策略
1.1.3.1 “七態”向量
在所有的彈道外推算法中,一個影響彈道外推的重要參數就是彈道系數。校射模式下,彈道系數為已知,濾波算法通常構造六態狀態向量,包括彈丸的位置坐標和速度,再以此建立狀態方程,這可以認為是合理的。偵察模式下,敵方炮彈的彈道系數顯然未知,于是出現了2種做法:一是算法認為彈道系數是常數,以相鄰兩點的速度、加速度濾波值代入彈道方程進行彈道系數粗略估計,實驗證明誤差較大;二是另一種彈道系數估計方法,即通過馬赫數、阻力系數、彈丸速度等參數求取彈道系數,不過這種方法對先驗知識要求極高,實際中難以使用[12-14]。
有文獻提出,可將該參數納入濾波過程,不斷迭代,最終獲取較為精確的參數估計結果。選取彈丸位置(x,y,z)及其在三維坐標軸上的速度分量(VX,VY,VZ)和彈道系數C形成7個參數的狀態向量,簡稱“七態”:
X=(x1,x2,x3,x4,x5,x6,x7)=
(x,y,z,vx,vy,vz,C)
(28)
此時,彈道估計狀態方程為:
(29)
1.1.3.2 反向濾波
反向濾波的原理在于減小外推距離。很多彈道外推算法,在偵察模式下進行濾波時,依然選擇濾波時沿時間軸的正方向,即起始波束Ss至截止波束Se,外推時從濾波終點Se開始,按照估計的狀態向量進行外推[15-17]。但這種方法可以通過反向外推減小外推距離,從而提高外推精度。
為了提高偵察模式下的發點外推精度,有文獻提出,可以在濾波時選擇相反的方向。即,將截止波束Se作為濾波起點,起始波束Ss作為濾波終點。該濾波算法對時間“方向”取反,將跟蹤波束中的最后一點Ss作為外推時的起點,各坐標軸的速度分量為(-VX,-VY,-VZ),于是狀態向量為X=[x,y,z,-Vx,-Vy,-Vz,C]。
實際證明,該方法的外推距離更短,誤差更小,可以加以利用[18-19]。
1.2 其它2種對比算法
本文選擇了其它2種較為常見的彈道外推算法作為對比,介紹如下。
算法1:國內某雷達實際使用算法。彈道運動模型與本文一致,但是選擇的濾波方法為擴展卡爾曼濾波(EKF);偵察模式下利用了反向濾波的思想,但是對彈道系數的估計是基于對現有彈道量測點擬合的思想計算得到的。
算法2:國內某雷達實際使用算法。選擇的濾波方法與本文一致,即UKF,但是利用的是不一樣的彈道運動模型;偵察模式下也利用了反向濾波的思想,但是對彈道系數的處理是選取1個固定的經驗值。
1.3 測試結果及分析
外推算法對比試驗選取同一炮彈的雷達量測軌跡,選取同一起點,分別截取的量測軌道點數為50、100、150、200,每次外推次數為100。校射和偵察誤差實驗結果分別如圖1和圖2所示。
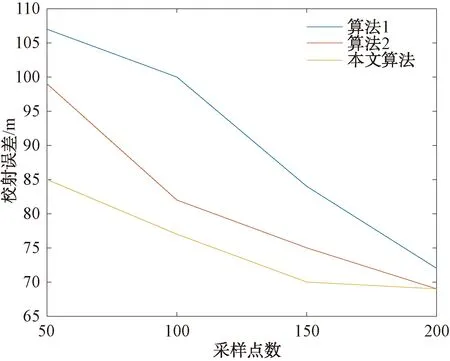
圖1 3種算法校射誤差
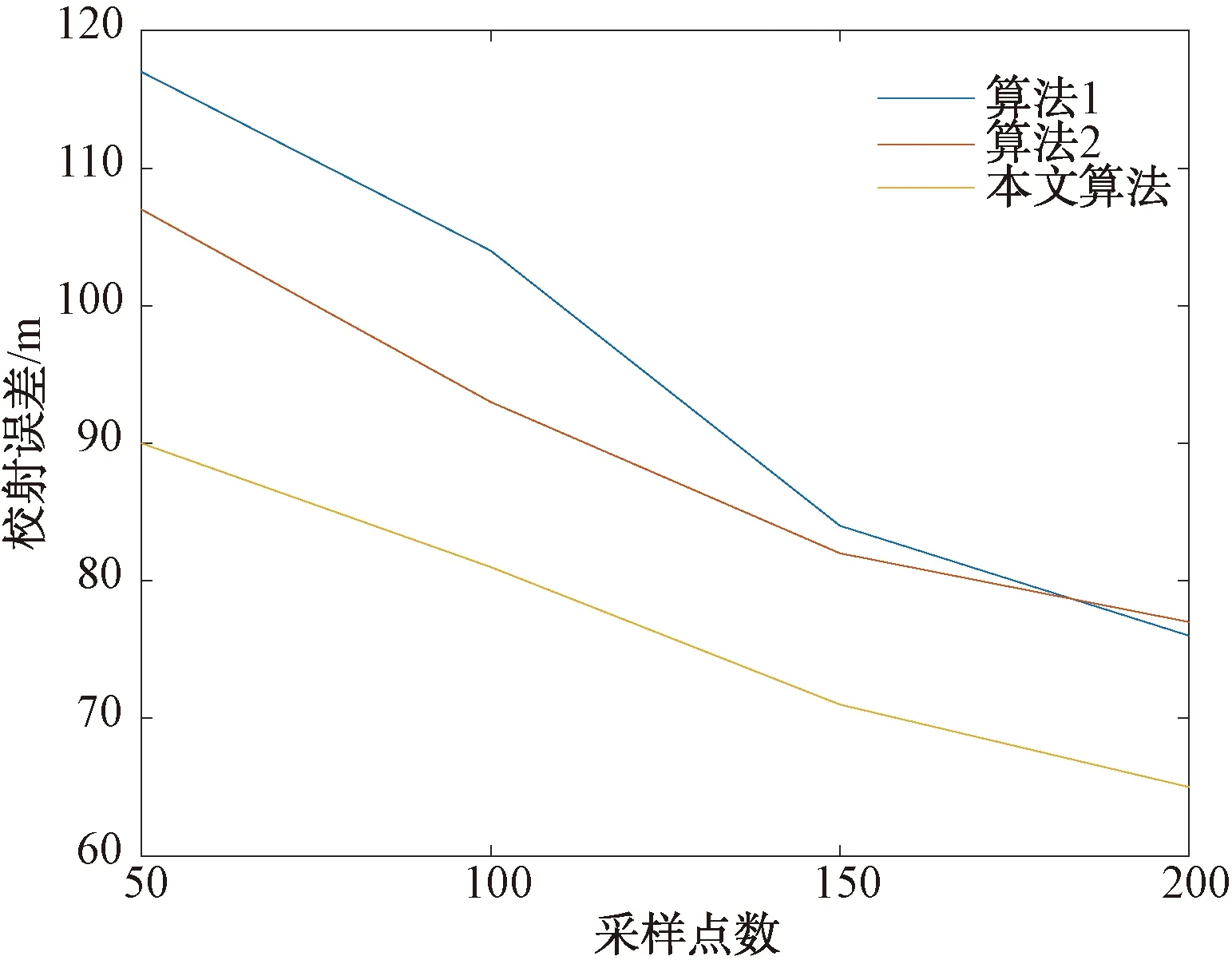
圖2 3種算法偵察誤差
顯然,本文算法的外推誤差要明顯小于另外2種算法,且原始軌跡采樣點數越多,即外推起始點越接近外推目標點,外推誤差越小。
2 結束語
炮彈彈道落發點外推算法的好壞是決定炮位偵察校射雷達的關鍵因素之一。本文在對文獻梳理和現有算法仿真研究的基礎上,提出了一種基于無跡卡爾曼濾波和炮彈運動軌跡模型的落發點外推新算法。在所有算法中,該算法首次嘗試將這兩者結合起來,并加入了其它一些先進的外推策略,如“七態”和反向濾波。經過大量仿真和雷達實測數據的測試,結果顯示,相比于國內其它2種常用的彈道外推算法,該算法的外推效果得到了大大提高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
核科學與工程(2015年4期)2015-09-26 11:59:03
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
